东华大学线性VF转换课程设计报告材料2014
- 格式:doc
- 大小:1.00 MB
- 文档页数:19
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! == 东华大学微机实验报告答案(软件) (3000字)目录实验一 DEBUG的启动及其基本命令的使用实验二内存操作数及寻址方法实验三汇编语言程序的调试与运行实验四查表程序设计实验五系统功能调用实验六分支程序设计实验七循环程序设计实验八子程序设计实验九综合程序设计实验心得体会参考文献实验一 DEBUG的启动及其基本命令的使用源程序:(指导书中给出)DATA SEGMENTSTRING1 DB 'Move the cursor backward'STRING2 DB 'Move the cursor backward'MESS1 DB 'Match.',13,10,'$'MESS2 DB 'No Match.',13,10,'$' DATA ENDSSTACK SEGMENT STACKDB 40 DUP (?) STACK ENDSPROGNAM SEGMENTASSUME CS:PROGNAM,DS:DATA,ES:DATA,SS:STACKMAIN PROC FAR START: PUSH DSXOR AX,AX PUSH AXMOV AX,DATAMOV DS,AXMOV ES,AXMOV AX,STACKMOV SS,AXLEA SI,STRING1LEA DI,STRING2CLDMOV CX,25REPZ CMPSBJZ MATCHLEA DX,MESS2JMP SHORT DISP MATCH: LEA DX,MESS1 DISP:MOV AH,09hINT 21H RETMAIN ENDP PROGNAM ENDS END START运行结果:用DEBUG调试将输出字符串改为‘No Match’用E指令修改“backward”为“forward”再次用d命令查看修改结果。
东华大学线性V/F转换课程设计报告信息科学与技术学院目录二、设计任务及要求 .................................................. (1)设计任务........................................................ (2)性能指标要求....................................................三、设计方案选择..................................................... 1.方案一及框图......................................................2.方案二及框图.......................................................3.方案原理优缺点比较.................................................四、设计思路.........................................................1、输入信号:电源分压电路............................................2、阻抗变换:电压跟随器..............................................3、基准源............................................................4、积分电路..........................................................5、脉冲输出电路......................................................6、开关电路..........................................................7、总电路图..........................................................五、计算机仿真.......................................................六、实际组装与调试...................................................1.电路器件表.........................................................2.总输出波形.........................................................3.实际连接电路.......................................................4.组装和调试过程.....................................................七、数据分析及改进................................................... (1)数据处理........................................................ (2)数据分析........................................................ (3)根据数据分析所得改进方法........................................八、心得与体会.......................................................九、参考文献.........................................................十、附录.............................................................一、各器件引脚图.....................................................二、手绘电路图.......................................................一、设计概述线性V/F转换器是压控振荡器中完成外加电压和输出频率线性变换的部分。
谢谢观赏谢谢观赏东华大学东华校〔2015〕43号东华大学关于2014-2015学年度信息公开工作的报告教育部:根据《高等学校信息公开办法》和《教育部关于公布<高等学校信息公开事项清单>的通知》(以下简称《清单》)的有关规定,依照《教育部办公厅关于进一步落实高校信息公开清单做好高校信息公开年度报告工作的通知》(教办厅函[2015]48号)要求,结合我校在上一学年信息公开的实际工作情况,编制本年度报告。
全文共包括七部分:概述、主动公开情况、专项工作公开情况、依申请公开和不予公开情况、对信息公开的评议情况、因学校信息公开工作受到举报的情况、主要经验、问题和改进措施等。
本报告电子版可以从东华大学信息公开网站()上下载。
如对本报告有任何疑问,请与东华大学校长办公室联系,联系电话:。
一、概述2014-2015学年,东华大学全面贯彻落实党的十八届四中全会精神和习总书记系列重要讲话精神,深化综合改革,促进学校治理体系和治理能力现代化。
在教育部办公厅的指导下,全面落实《教育部关于公布<高等学校信息公开事项清单>的通知》的要求,将信息公开工作列入年度工作要点,调整专栏公开目录,加强信息发布,依法依规答复信息公开申请,不断提高学校信息公开的透明度。
1、推动清单落实,进行核查整改。
根据《教育部关于公布<高等学校信息公开事项清单>的通知》的要求,结合《教育部办公厅关于直属高校落实<高等学校信息公开事项清单>督查情况的通报》相关文件,针对我校少部分未公开事项整理出信息公开落实情况核查表,参照教育部和沪上其他部属高校的公开情况,全面落实清单所列事项的公开,进一步细化主动公开范围和公开目录,做好动态更新,明确信息公开内容、范围、责任,细化到具体条目。
对于原本仅对校内教职工和学生开放的公开事宜,进一步拓宽公开范围,转为面向全社会公开。
2、健全信息公开制度,增强公共服务意识。
自《东华大学章程》被教育部核准颁布后,我校初步形成了以章程为统领的制度体系。
图形的移动旋转可以分几步进行:(1)先在屏幕上显示某个图形(自定义图形);(2)延时适当时间(3)清除这个图形;(4)改变图形显示的行列坐标及倾角(5)返回第(1)步,重复上述过程。
按下回车结束。
可自定义上、下、左、右移动键及顺时针、逆时针旋转键,还可以直接给出移动坐标、旋转角等。
;includeMyMacro.h;*****************************宏文件包含*********************************; MyMacro.inc - macro definitions defined by for easy input/output; written date : 2014/1/5; ——————声明——————;以下创建一些程序中经常用到的功能的宏,其中一部分引用EMU8086环境内置宏文件emu8086.inc或;经本人修改后完成。
为了省掉链接过程,这里将该部分不另存为一个文件,而是直接包含在此。
;*********************输出字符串******************; this macro prints a string that is given as a parameter, example:; PRINT 'hello world!'; new line is NOT added.PRINT MACRO sdatLOCAL next_char, s_dcl, printed, skip_dclPUSH AX ; store registers...PUSH SI ;PUSH BXJMP skip_dcl ; skip declaration.s_dcl DB sdat, 0skip_dcl:LEA SI, s_dclMOV BX,3next_char:MOV AL, CS:[SI]CMP AL, 0JZ printedINC SIMOV AH, 0Eh ; teletype function.INT 10hJMP next_charprinted:POP BXPOP SI ; re-store registers...POP AX ;ENDM;************************************************; position:GOTOXY MACRO col, rowPUSH AXPUSH BXPUSH DXMOV AH, 02hMOV DH, rowMOV DL, colMOV BH, 0INT 10hPOP DXPOP BXPOP AXENDM;************************************************;******************单字符的输出******************* ; this macro prints a char in AL and advances; the current cursor position:PUTC MACRO charPUSH AXPUSH BXMOV BX,01MOV AL, charMOV AH, 0EhINT 10hPOP BXPOP AXENDM;************************************************;*********************清屏函数****************** ; this macro defines procedure to clear the screen,; (done by scrolling entire screen window),; and set cursor position to top of it:DEFINE_CLEAR_SCREEN MACROLOCAL skip_proc_clear_screen; protect from wrong definition location:JMP skip_proc_clear_screenCLEAR_SCREEN PROC NEARPUSH AX ; store registers...PUSH DS ;PUSH BX ;MOV AX, 40hMOV DS, AX ; for getting screen parameters.MOV AH, 06h ; scroll up function id.MOV AL, 0 ; scroll all lines!MOV BH, 10H ; attribute for new lines.MOV CH, 0 ; upper row.MOV CL, 0 ; upper col.MOV DI, 84h ; rows on screen -1,MOV DH, [DI] ; lower row (byte).MOV DI, 4Ah ; columns on screen,MOV DL, [DI]DEC DL ; lower col.INT 10h; set cursor position to top; of the screen:MOV BH, 0 ; current page.MOV DL, 0 ; col.MOV DH, 0 ; row.MOV AH, 02INT 10hPOP DI ; re-store registers...POP CX ;POP BX ;POP DS ;POP AX ;RETCLEAR_SCREEN ENDPskip_proc_clear_screen:DEFINE_CLEAR_SCREEN ENDM;*************************************************************************;************************************************************************* data segmentflag dw 0 ;临时标志位tempchardb 0,0,0tendb 10ten1dw 10bufferdb 5,?,5 dup(0) ;用于AH=0AH, INT 21H功能的缓冲区,存放输入数据x1dw ?y1dw ?x2dw ?y2dw ?diffx2dw ?diffy2dw ?incxdw ?incydw ?;用于计算旋转角度的三角函数表cosdxdw 100,97,87,71,49,24,0,-24,-49,-71,-87,-97,-100,-97,-87,-71,-49,-24,0,24,49,71,87,97 sindxdw 0,-24,-49,-71,-87,-97,-100,-97,-87,-71,-49,-24,0,24,49,71,87,97,100,97,87,71,49,24 data endsstack segmentdw 128 dup(0) ;堆栈,主要用于保护现场和函数参数传递stack endscodes segmentassumecs:codes,ds:data,ss:stack;***************正式程序段**********************start:DEFINE_CLEAR_SCREENmov ax, datamov ds, ax ;数据段和附加段同段moves, axmov al,12h ;设置图形模式640*480*16Smov ah,0int 10hmov ah,0bh ;设置背景色mov bh,0mov bl,7chint 10hGOTOXY 38,0 ;设置光标位置PUTC 02PUTC 02PUTC 02GOTOXY 8,1PRINT '|-_-------------------------WELCOME-----------------------------_-|'GOTOXY 8,2PRINT '| Move or rotate the figure as the following tips |'GOTOXY 8,3PRINT '| Up(W) | Rotate |' GOTOXY 8,4PRINT '| Left(S) Right(D) | Counterclockwise(J) Clockwise(K)|'GOTOXY 8,5PRINT '| Down(S) | |'GOTOXY 8,7PRINT '| You can enter the setting mode when you input 'i',then you |'GOTOXY 8,8PRINT '| can set the parameters each time with a 'enter' key ended. |'GOTOXY 8,9PRINT '| |'GOTOXY 8,10PRINT '|-_-------- ALL RIGHTS RESERVED----------_-|'GOTOXY 2,11PRINT 'PRESS ANYKEY TO SHOW THE FIGURE...(YOU CAN EXIT ANYTIME WHEN YOU INPUT ENTER.)' GOTOXY 5,5mov si,200mov di,200mov ah,8int 21hxorbx,bxjmppress_wget_key:mov ah,8 ;识别按键,进入对应的处理过程int 21hcmpal,'w'jepress_wcmpal,'s'jepress_scmpal,'a'jepress_acmpal,'d'jepress_dcmpal,'j'jepress_jcmpal,'k'jepress_kcmp al,27cmpal,'i'jepress_icmp al,0dhje quit_jmpget_key; jepress_escquit_: ;按回车键退出系统时设置提示符确认,防止误操作退出系统GOTOXY 4,8PRINT 'Do you want to exit? 'GOTOXY 4,9PRINT 'Input y to exit, and input n to cancel...'chooseexit:mov ah,8jeexit_systemcmpal,'n'jecancel_exitjmpchooseexitcancel_exit:callshow_figurejmpget_keyexit_system:mov ax, 4c00h ;程序返回操作系统int 21h;*************上下左右平移和旋转操作************** press_w:dec dicall judge_range ;移动图形之前,先判断是否移出界movax,flagcmp ax,1jnzgo_wcallshow_figurejmpget_keygo_w:inc dijmpget_keypress_s:inc dicalljudge_rangemovax,flagcmp ax,1jnzgo_scallshow_figurejmpget_keygo_s:dec dijmpget_keypress_a:decsicalljudge_rangemovax,flagcmp ax,1jnzgo_acallshow_figurejmpget_keygo_a:incsipress_d:incsicalljudge_rangemovax,flagcmp ax,1jnzgo_dcallshow_figurejmpget_keygo_d:decsijmpget_keypress_j:cmp bx,44jnarotatebackmov bx,-2rotateback:incbx ;BX自增2,寻址三角函数表incbxcalljudge_rangemovax,flagcmp ax,1jnzgo_jcallshow_figurejmpget_keygo_j:decbxdecbxjmpget_keypress_k:cmp bx,2jnl rotateback1mov bx,48rotateback1:decbxdecbxcalljudge_rangemovax,flagcmp ax,1jnzgo_kcallshow_figurejmpget_keygo_k:incbxincbx;*******************交互输入参数值******************* press_i:pushbxpush dipushsiGOTOXY 60,2 ;用':'指示对应位置的输入PRINT ': 'calldata_inputcmp ax,000fh ;键入'o'代表退出参数设定模式jnz goon1pop si ;输入有误,恢复表征坐标和角度的寄存器值pop dipopbxcallshow_figurejmpget_keygoon1:addsi,axcalljudge_rangemovax,flagcmp ax,1jzninputx_errorpopsipop dipopbxjmpinput_errorninputx_error:GOTOXY 60,3PRINT ': 'calldata_inputadddi,axcalljudge_rangemovax,flagcmp ax,1jzninputy_errorpopsipop dipopbxjmpinput_errorninputy_error:GOTOXY 60,4PRINT ': 'calldata_inputshl ax,1jl judgebx1call_judge:calljudge_rangemovax,flagcmp ax,1jzninputa_errorpopsipop dipopbxjmpinput_errorjudgebx:sub bx,48cmp bx,46jgjudgebxjmpcall_judgejudgebx1:add bx,48cmp bx,0jl judgebx1jmpcall_judgeninputa_error: ;输入无误,清楚入栈内容,防止占用空间pop cxpop cxpop cxcallshow_figurejmpget_key;**********************************************;*****************数据输入函数*****************data_inputprocpushbxpush cxpush dxleadx,buffermov ah,0Ahint 21hmov ax,0xorcx,cxmov cl,buffer+1 ;系统自动载入,实际字符个数(不包括return) lea bx,buffer+2cmp [bx],'-'jz data_next1 ;判断输入的是否为负数data_next:adc ah,0incbxloopdata_nextjmpdatainput_exitdata_next1:dec clincbxdata_next2:mul ten1 ;输入代表负数,将输入数据求补后放在AX中mov dl,[bx]and dl,0fhaddal,dladc ah,0incbxloop data_next2neg axdatainput_exit:mov cl,0 ;及时清空缓存区mov buffer+1,clmov buffer+2,clmov buffer+3,clmov buffer+4,clmov buffer+5,clmov buffer+6,clpop dxpop cxpopbxretdata_inputendp;**********************************************;***************输入错误提示*******************input_error:callshow_figureGOTOXY 7,5PRINT 'Input error,try again...(You can input 'o' to exit the setting mode)' jmppress_i;**********************************************;************判断坐标点是否越界的函数******************judge_rangeprocpush dxpush axpushsimovdx,siadd dx,100cmp dx,20jngnshow_exit ;注意是用有符号数比较cmp dx,620jnlnshow_exitmovdx,diadd dx,100cmp dx,100jngnshow_exitcmp dx,470jnlnshow_exit;判断第2个顶点是否出界movdx,simov ax,[bx+cosdx]add ax,100adddx,axcmp dx,20jngnshow_exitcmp dx,620jnlnshow_exitmovdx,dimov ax,[bx+sindx]add ax,100adddx,axcmp dx,100jngnshow_exitcmp dx,470jnlnshow_exit;判断第3个顶点是否出界movdx,simov ax,[bx+sindx]neg axadd ax,100adddx,axcmp dx,20jngnshow_exitcmp dx,620jnlnshow_exitmovdx,dimov ax,[bx+cosdx]add ax,100adddx,axcmp dx,100jngnshow_exitcmp dx,470movflag,ax ;flag作为坐标点是否出界的标志pop dipopsipop axpop dxretnshow_exit:mov ax,0movflag,ax ;flag为0代表出界,为1代表不出界pop dipopsipop axpop dxretjudge_rangeendp;*****************************************************;**********************描点函数*********************** draw_pointprocpush axpushbxpush cxpush dxmov ah,0chxorbx,bxmovcx,simovdx,dimov al,01h ;LINE ATTRIBUTEint 10h ;画像素点pop dxpop cxpopbxpop axretdraw_pointendp;****************************************************;*************Bresenham算法画直线******************** draw_lineprocpush si ;现场保护push dipush axpushbxpush cxmov si,x1 ;画线起点cmp ax,y1jzdraw_horlinemov ax,x2cmp ax,x1jzdraw_verlinesub ax,x1jnc next1mov incx,-1neg axnext1:movdiffx,ax ;得到X方向的长度mov ax,y2sub ax,y1jnc next2mov incy,-1 ;incy和incx为1或-1决定了画线的方向neg axnext2:movdiffy,ax ;得到Y方向的长度shl ax,1mov diffy2,ax ;得到2倍的diffx和diffymovax,diffxshl ax,1mov diffx2,axshr ax,1cmpax,diffyjbdxbdyjzdxedy;以X轴步进加1画线movcx,diffxmov ax,diffy2subax,diffxdrawlop1:cmp ax,0jl errorl0sub ax,diffx2 ;误差累积adddi,incyerrorl0:add ax,diffy2addsi,incxcalldraw_pointloop drawlop1jmpdrawline_exit;以Y轴步进加1画线cmp ax,0jl errorl0_sub ax,diffy2 ;误差累积addsi,incxerrorl0_:add ax,diffx2adddi,incycalldraw_pointloop drawlop2jmpdrawline_exitdxedy:movcx,diffydrawlop5:addsi,incxadddi,incycalldraw_pointloop drawlop5jmpdrawline_exit;画水平线draw_horline:mov ax,x2sub ax,x1ja next4mov incx,-1neg axnext4:movcx,axdrawlop4:addsi,incxcalldraw_pointloop drawlop4jmpdrawline_exit;画垂直线draw_verline:mov ax,y2sub ax,y1ja next3mov incy,-1neg axnext3:movcx,axdrawlop3:loop drawlop3jmpdrawline_exit;退出画线函数drawline_exit:pop cxpopbxpop axpop dipopsiretdraw_lineendp;***************************************************;******************显示图像函数********************* show_figureproc;显示自定义图形,这里显示等腰直接三角形call CLEAR_SCREEN;第1条线callshow_backmov x1,siadd x1,100mov y1,diadd y1,100mov x2,simov ax,[bx+cosdx]add ax,100add x2,axmov y2,dimov ax,[bx+sindx]add ax,100add y2,axcalldraw_line;第2条线mov x1,siadd x1,100mov y1,diadd y1,100mov x2,simov ax,[bx+sindx]neg axadd ax,100add x2,axmov y2,dimov ax,[bx+cosdx]add ax,100;第3条线mov x1,simov ax,[bx+sindx]neg axadd ax,100add x1,axmov y1,dimov ax,[bx+cosdx]add ax,100add y1,axmov x2,simov ax,[bx+cosdx]add ax,100add x2,axmov y2,dimov ax,[bx+sindx]add ax,100add y2,axcalldraw_lineretshow_figureendp;*************************************************;************************************************* show_backprocpush ax;画一个边框mov ax,20mov x1,axmov ax,100mov y1,axmov ax,620mov x2,axmov ax,100mov y2,axcalldraw_linemov ax,620mov x1,axmov ax,470mov y1,axcalldraw_linemov ax,20mov x2,axmov ax,470mov y2,axmov x1,axmov ax,100mov y1,axcalldraw_line;显示设置参数信息GOTOXY 5,0PRINT '* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *'GOTOXY 5,1PRINT '* Location and angle Settings *' GOTOXY 5,2PRINT '* Input the increment value on the x-axis *'GOTOXY 5,3PRINT '* Input the increment value on the y-axis *' GOTOXY 5,4PRINT '* Input the rotating angle(integer times of 15 degree) *'pop axretshow_backendp;*************************************************codes ends ;结束end start。
《自动控制原理实验》实验报告(二)一、Simulink仿真二、自控原理模拟实验(线性系统的时域分析)姓名:刘克勤学号:110901112班级:自动化1104班指导老师:石洪瑞东华大学信息学院12345678910MP5.6为了保持飞机的航向和飞行高度,人们设计了如图MP5.6所示的飞机自动驾驶仪。
(a) 假设框图中的控制器是固定增益的比例控制器()2c G s = ,输入为斜坡信号(),0.5/dt at a s θ== ,利用matlab 计算并以曲线显示系统的斜坡响应,求出10s 后的航向角误差。
(b) 为了减小稳态跟踪误差,可以采用较复杂的比例积分控制器(PI),即()2112c K G s K s s=+=+ 试重复(a)中的仿真计算,并比较这两种情况下的稳态跟踪误差。
图MP5.6 飞机自动驾驶仪框图(a) 解:Simulink 仿真原理图 :运行结果如下:12345678910(b)解:Simulink 仿真原理图 :运行结果如下:MP5.7 导弹自动驾驶仪速度控制回路的框图如图MP5.7所示,请用MATLAB/Simulink 求系统的单位阶跃响应,并求出峰值PtM 、超调量..%P O ,峰值时间P T 、调整时间S T 。
.图MP5.7 导弹自动驾驶仪速度控制回路解:Simulink仿真原理图:仿真结果:00.10.20.30.40.50.60.70.80.91峰值时间:Tp=0.1062;峰值:Mp=1.294;超调量:P.O.=(1.294-1)/1=0.294=29.4% 。
00.51 1.52 2.53 3.54 4.55系统稳态值为1,根据2%的误差准则,系统稳定到0.98时的调整时间约为:Ts=2.539。
0102030405060MP5.8 设计如下系统的Simulink 仿真图,求系统的阶跃响应曲线及超调量、调整时间。
图MP5.8 非单位反馈控制系统解:Simulink 仿真原理图:运行结果:由系统稳态值为0.5,根据2%的误差准则,系统稳定到0.51的时间即为调整时间Ts=39.05。
东华⼤学信号与线性系统课程设计答案答案东华⼤学信号与线性系统课程设计班级:学号:姓名:东华⼤学信息学院⽬录实验⼀连续信号的时域分析 (3)实验⼆连续时间系统的时域分析 (8)实验三连续信号的频域分析 (14)实验四连续系统的频域分析 (22)实验五信号采样与重建 (33)实验六离散时间信号和系统分析 (39)实验总结 (46)实验⼀连续信号的时域分析⼀、实验⽬的1、熟悉MATLAB 软件。
2、掌握常⽤连续信号与离散信号的MATLAB 表⽰⽅法。
⼆、实验设备安装有matlab6.5 以上版本的PC 机⼀台。
三、实验原理四、实验内容1、⽤MATLAB表⽰连续信号:tAe ,Acos(ω0 t +?),Asin(ω0 t +?)。
源程序:clcclearclosesyms t;f1=2*exp(t);f2=2*cos(3*t+4);f3=2*sin(3*t+4);subplot(2,2,1);ezplot(f1,[-10,2]);title('f(t)=2e^t');grid on;subplot(2,2,2);ezplot(f2,[-5,5]);xlabel('t');title('f(t)=2cos(3t+4)');grid on;subplot(2,2,3);ezplot(f3,[-5,5]);xlabel('t');title('f(t)=2sin(3t+4)');grid on2、⽤MATLAB表⽰抽样信号(sinc(t))、矩形脉冲信号(rectpuls(t, width)) 及三⾓脉冲信号(tripuls(t, width, skew))。
源程序:clcclearcloset=-5:0.01:5;f1=sinc(t);f2=3*rectpuls(t,4);f3=3*tripuls(t,4,0);subplot(2,2,1);plot(t,f1);xlabel('t');title('f(t)=sinc(t)');grid on;subplot(2,2,2)plot(t,f2);xlabel('t');title('f(t)=3rectpuls(t,4)');grid on;axis([-5,5,-1,4]);subplot(2,2,3);xlabel('t');title('f(t)=3rectpuls(t,4,0)');grid on;axis([-5,5,-1,4]);3、编写如图3 的函数并⽤MATLAB 绘出满⾜下⾯要求的图形。
章节目录1.设计内容及要求 (2)2.方案选择 (2)3.单元电路设计 (3)4.总电路图及描述 (8)5.调试问题及修改方法 (10)6.总电路图 (11)7.器件表 (12)8.参考资料 (12)9.体会 (13)10.附录 (15)(一)、设计内容及要求一、课题:V/F转换(压控振荡器VCO)二、要求:(1)输入电压为0~10V,输出信号为0~10KHz的脉冲波,两者呈线性关系;(2)输出是脉冲,宽度20uf~50uf,宽度不变;(3)精度要求,最大误差10Hz。
(二)、方案选择(1)双D实现vco:(2)光耦合v/f转换装置:(4)Vf320,V/F转换器(三)、单元电路设计一、电源端R1Rw这里R1=2kΩ,结合串联电路分压定律,从而确保滑动变阻器在滑动的过程中,端口的输出电压能够顺利地取到0至10V之间的所有值。
二、电压跟随器:对失调电阻的计算:为了使电路的输出在整个电压输入的范围内平均误差最小,则取Rw=5kΩ时,计算失调电阻,由运算放大器及深度反馈知识可得:R2=5//(5+4.7)=3.3(kΩ)引入电压跟随器是为了进行阻抗变换,使得电源的内阻对后面的电路不产生影响,从而确保后面电路在压控转换中的良好线性。
三、反相积分电路:相关参数计算:首先假设电容正向充电占总脉冲的0.24当输入端输入电压为10V时,整个积分电路输出端的输出电压变化差值为10V ,则由积分电路公式dt u RCu ⎰-=I O 1可得: -10V=11RC -*10V*0.24*T ① 其中T=1/f=1.0*10-4,由①可得:RC 1=0.24*10-4现电路中R*0.01uF=0.24*10-4,符合计算得到的结果。
R 3 这个阻值是通过4.7k Ω滑动变阻器调节得到。
四、555单稳态电路:0.01uF仿真波形:555计时器的接法及相关参数计算:555组成的单稳电路可以计算R的阻值。
我们只需要Tw值介于20us和50us就可以。

东华大学微机原理实验班级:电气学号:东华大学信息学院硬件实验部分一、综合设计实验部分一、设计要求参考基础实验的实验1~实验5所使用的硬件和例程序,设计一个简单的红绿灯控制系统,用LED1~LED表示两组红绿灯,每组红灯、绿灯各1只。
要求实现以下功能:(1)红绿灯的定时切换(每10秒切换一次)⑵ 设置灯光测试开关K1,当K1打开(高电平)时,LED1~LED全亮,关闭时恢复正常切换。
提示:⑴ 定时功能可利用8253实现,利用定时器输出作为中断申请,利用中断处理切换LED的显示;LED状态可用存保存或用I/O 口读取。
(2)测试功能运行可在主循环中通过I/O 口读取开关状态后判定,或利用中断处理方式运行。
二、报告要求:1外围芯片信号连接原理图(与CPU连接部分可省略)2程序的流程图、源代码和源代码行中必要的注释3调试中遇到的问题和解决方法三、程序源代码及流程框图:assume cs:codecode segme nt publicorg 100hst: mov dx,04c0h ;74LS244 地址in al,dx ; 读输入开关量mov dx,04d0h ;74LS273 地址输出至LEdout dx,al ;test al,18h jne start jmpststart: mov dx,04b6h ;控制寄存器mov ax,36h ;计数器0,方式3out dx,axmov dx,04b0hmov ax,7Chout dx,axmov ax,92hout dx,ax ;计数值927Cmov dx,04b6hmov ax,0b6h ;计数器2,方式3out dx,axmov dx,04b4hmov ax,90hout dx,axmov ax,01out dx,axn ext:nopstart1控制寄存器地址: mov dx,04a6h ;mov ax,90h ;设置为A 口输入,B 口输出,c 口输出out dx,axmov dx,04c0h ;74LS244 地址in al,dx ; 读输入开关量test al,18hstart2 :code end je stin ax,dx ;输入mov dx,04a2h ;B 口地址out dx,ax ;输出mov dx,04a4h ;c 口地址not axout dx,ax ;输出mov dx,04c0h ;74LS244mov dx,04a0h ;A 口地址in al,dxtest al,18hje stjmpjmp n extstart2endsst四:解决问题及原理图地址读输入开关量二、基础实验部分实验1 存储器读写实验一、实验设备微机实验箱、8086CPU莫块。
东华大学化工原理课程设计一、课程目标知识目标:1. 理解并掌握化工原理中的基本概念、原理和定律,如流体力学、热力学、传质和反应工程等。
2. 掌握化学工程中的数学模型和计算方法,能够运用相关公式进行工程计算。
3. 了解化工过程中常见设备的构造、工作原理及其在工程中的应用。
技能目标:1. 能够运用所学原理分析和解决实际的化工问题,具备一定的工程设计和优化能力。
2. 培养运用文献检索、实验操作、数据处理等技能,进行化工相关信息查询、实验设计和结果分析的能力。
3. 提高团队协作和沟通能力,能够在项目中进行有效分工与合作。
情感态度价值观目标:1. 培养学生对化学工程学科的兴趣和热情,激发其探索精神和创新意识。
2. 树立安全、环保和可持续发展的化工理念,增强社会责任感和职业道德。
3. 培养严谨求实的学术态度,提高面对工程挑战时的自信心和抗压能力。
课程性质分析:本课程为东华大学化工专业核心课程,旨在为学生提供化学工程领域的基础理论、实践技能和工程素养。
学生特点分析:学生具备一定的化学基础和数学功底,具有较强的逻辑思维能力和动手操作能力,但对化工实际应用的了解有限。
教学要求:结合课程性质和学生特点,注重理论与实践相结合,强调知识的应用性和实践性,培养学生解决实际问题的能力。
通过分解课程目标为具体学习成果,便于后续教学设计和评估。
二、教学内容1. 流体力学:涵盖流体静力学、流体动力学、流体阻力与能量损失等基本概念和原理,结合教材相关章节,通过实例分析,使学生掌握流体在化工设备中的流动特性及计算方法。
2. 热力学:介绍热力学基本定律,热力学性质图表的应用,以及换热器的设计与优化,结合教材内容,使学生能够分析和解决化工过程中的热能转换与传递问题。
3. 传质过程:讲解分子扩散、对流传质、质量传递等基本理论,结合实际案例,使学生掌握传质设备的设计和操作原理。
4. 化学反应工程:探讨反应动力学、反应器设计及反应过程控制等内容,结合教材章节,培养学生分析和优化化学反应过程的能力。
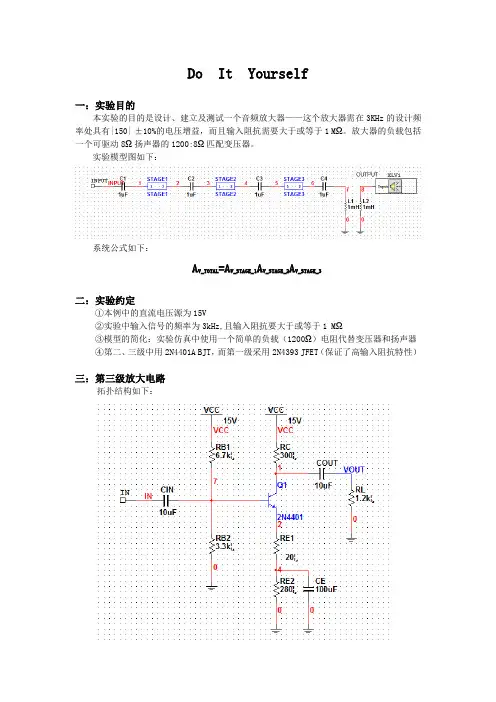
Do It Yourself一:实验目的本实验的目的是设计、建立及测试一个音频放大器——这个放大器需在3KHz的设计频率处具有|150| ±10%的电压增益,而且输入阻抗需要大于或等于1 MΩ。
放大器的负载包括一个可驱动8Ω扬声器的1200:8Ω匹配变压器。
实验模型图如下:系统公式如下:A V_TOTAL=A V_STAGE_1A V_STAGE_2A V_STAGE_3二:实验约定①本例中的直流电压源为15V②实验中输入信号的频率为3kHz,且输入阻抗要大于或等于1 MΩ③模型的简化:实验仿真中使用一个简单的负载(1200Ω)电阻代替变压器和扬声器④第二、三级中用2N4401A BJT,而第一级采用2N4393 JFET(保证了高输入阻抗特性)三:第三级放大电路拓扑结构如下:仿真2N4401特性曲线以及直流负载线和静态工作点图形如下:仿真过程及方法:将2N4401晶体管连接到按照所给文档的连接方式连接到特性曲线连接仪上,并按照文档中设置参数,之后运行,便得到上图。
仿真结果分析:已知仿真结果为2N4401的特性曲线图,再在上图中做出输出回路负载线(上图中未画出),其与I B=I BQ这条输出曲线的交点即为静态工作点Q。
(由于图中坐标未标出,此处不方便计算,而是通过软件中的直流工作点分析仿真得到)测的第三级直流工作点如下图:仿真过程及方法:将电路图按第一张图中的拓扑结构连接好。
然后再按照如下命令:仿真->分析->直流工作点,添加相应的需要仿真得到的量后,确定仿真,即可得到直流仿真数据。
(PS:关于BJT放大器中参数的添加:打开直流工作点仿真界面->添加原件/模型参数->器件类型(选BJT),名称(选相应名称),参数(选择I B,I C)->确定->仿真即可。
参考资料:/ART_86303_19_35501_AN_757d6b22.HTM?jumpto=view_welcomead_1411130187592)。
实验一.信号的采样与保持一、实验目的1.熟悉信号的采样和保持过程2.学习和掌握香农 (采样) 定理3.学习用直线插值法和二次曲线插值法还原信号二、实验内容1.编写程序,实现信号通过A/D 转换器转换成数字量送到控制计算机,计算机再把数字量送到D/A 转换器输出。
2.编写程序,分别用直线插值法和二次曲线插值法还原信号。
三、实验设备PC 机一台,TD-ACC+实验系统一套,i386EX 系统板一块四、实验原理与步骤零阶保持香农 (采样) 定理:若对于一个具有有限频谱 (|W|<Wmax) 的连续信号f (t)进行采样,当采样频率满足 Ws≥2Wmax 时,则采样函数f*(t) 能无失真地恢复到原来的连续信号f(t)。
Wmax 为信号的最高频率,Ws 为采样频率。
实验线路图:本实验中,我们将具体来验证香农定理。
可设计如下的实验线路图,图中画“○”的线需用户在实验中自行接好,其它线系统已连好。
上图中,控制计算机的“OUT1”表示386EX 内部1#定时器的输出端,定时器输出的方波周期=定时器时常,“IRQ7”表示386EX 内部主片8259 的“7”号中断,用作采样中断。
这里,正弦波单元的“OUT”端输出周期性的正弦波信号,通过模数转换单元的“IN7” 端输入,系统用定时器作为基准时钟 (初始化为10ms) ,定时采集“IN7”端的信号,转换结束产生采样中断,在中断服务程序中读入转换完的数字量,送到数模转换单元,在“OUT1” 端输出相应的模拟信号。
由于数模转换器有输出锁存能力,所以它具有零阶保持器的作用。
采样周期T= TK ×10ms,TK的范围为01~ FFH,通过修改TK 就可以灵活地改变采样周期,后面实验的采样周期设置也是如此。
参考程序流程:基于上面的实验线路,可以设计如下的参考程序流程。
五.实验结果与分析1.零阶保持器采样周期10MS 信号频率0.5HZ采样周期10MS 信号频率1HZ采样周期10MS 信号频率2HZ采样周期10MS 信号频率5HZ采样周期50MS 信号频率1HZ采样周期50MS 信号频率2HZ采样周期50MS 信号频率5HZ采样周期100MS 信号频率0.5HZ采样周期100MS 信号频率2HZ2.线性插值法采样周期10MS 信号频率0.5HZ采样周期10MS 信号频率2HZ采样周期50MS 信号频率0.5HZ采样周期50MS 信号频率2HZ3.二次曲线插值法采样周期10MS 信号频率1HZ采样周期10MS 信号频率5HZ采样周期50MS 信号频率2HZ采样信号的还原效果的分析:实验二 数字PID 闭环控制按闭环系统误差信号的比例、积分和微分进行控制的调节器简称为PID 调节器 (也叫PID 控制器)。
实验一基本程序编程和程序调试一、实验目的1 、掌握数码转换等基本程序设计的技巧和方法。
2、熟悉 DEBUG 命令。
3 、学会和掌握用 DEBUG 调试程序的方法。
二、实验设备PC 机一台,装有 DOS 基本系统三、实验内容及步骤用 DEBUG 建立、汇编和运行调试程序的操作。
DEBUG 是 DOS 系统支持的用于汇编语言源程序调试的系统软件。
它共有 19 条命令完成相应的功能,命令及其格式可参阅附录一。
(一) DEBUG操作练习1)实验调试程序程序的功能是从3500H内存单元开始建立0-15共16个数据。
程序如下:地址 (H) 机器码(H) 助记符2000 BF0035 MOV DI, 35002003 B91000 MOV CX, 00102006 B80000 MOV AX, 00002009 9E SAHF200A 8805 MOV BYTE[DI], AL200C 47 INC DI200D 40 INC AX200E 27 DAA200F E2F9 LOOP 200A2011 F4 HLT2) 实验步骤:(1)输入与修改① 启动 DOS,在 DOS 提示符下输入 D E B U G 后回车,屏幕立即显示 DEBUG 提示符“ —”,表明已进入 DEBUG 状态,可以执行 DEBUG 的各种命令。
② 用 DEBUG 中的汇编命令“A 地址”将程序建立在内存单元中。
在提示符“—”下键入:“A 2000 ” 此时显示器上将会显示程序的段地址 CS 和偏移地址 IP,你就可以输入以上的程序了。
即显示 169C : 2000 键入 MOV DI, 3500169C: 2003 MOV CX, 0010169C : 2011 HLT: : :③ 用反汇编命令 “U 地址”检查程序在提示符“ — ”下,键入 “U 2000”,将从 2000 内存单元开始的内容反汇编,屏幕上显示169C : 2000 169C : 2003 169C : 2006 BF0035B91000B8000 M O V M OV M OV 3500 0010 0000: : :: : :169C : 2011 F4 HLT当发现程序有错时,可用汇编命令“ A 地址”进行修改,如要修改 200A 单元中的指令, 则键入 “A 200A ” ,屏幕显示 169C : 200A , 然后再键入 MOV BYTE[DI], AL ,就把错误的程序改正 了。
v f转换器课程设计一、课程目标知识目标:1. 学生能理解V-F转换器的原理,掌握其工作过程及功能。
2. 学生能掌握V-F转换器的数学模型,并运用相关公式进行计算。
3. 学生了解V-F转换器在工程实际中的应用,如电机调速、信号处理等。
技能目标:1. 学生能够运用所学知识,设计简单的V-F转换器电路。
2. 学生能够通过实验,观察并分析V-F转换器的性能,具备一定的实验操作能力。
3. 学生能够运用计算工具,对V-F转换器相关参数进行计算。
情感态度价值观目标:1. 学生通过学习,培养对电子技术的兴趣,提高学习积极性。
2. 学生在团队合作中,培养沟通、协作能力,增强团队意识。
3. 学生了解电子技术在我国经济发展中的重要性,增强国家使命感。
课程性质分析:本课程为电子技术基础课程,以理论教学和实践操作相结合的方式进行。
课程旨在使学生掌握V-F转换器的原理、设计和应用,为后续相关课程打下基础。
学生特点分析:学生处于高中阶段,具备一定的物理和数学基础,对电子技术有一定了解,但实际操作能力有待提高。
教学要求:1. 结合学生特点,注重理论与实践相结合,提高学生的实际操作能力。
2. 通过问题驱动、案例分析等教学方法,激发学生的学习兴趣,培养其解决问题的能力。
3. 注重团队合作,培养学生的沟通能力和团队精神。
二、教学内容1. 理论教学:a. V-F转换器的基本原理b. V-F转换器的数学模型及公式推导c. V-F转换器的类型及特点d. V-F转换器在工程实际中的应用案例分析2. 实践操作:a. V-F转换器电路设计与搭建b. V-F转换器性能测试与数据分析c. V-F转换器相关参数计算3. 教学大纲安排:第一周:V-F转换器基本原理学习第二周:V-F转换器数学模型及公式推导第三周:V-F转换器类型及特点学习第四周:V-F转换器应用案例分析及实践操作第五周:V-F转换器电路设计与搭建第六周:V-F转换器性能测试与数据分析第七周:总结与复习4. 教材章节:a. 教材第四章第三节:V-F转换器原理及其应用b. 教材第五章第二节:V-F转换器的设计与计算c. 教材第六章:电子技术应用案例分析教学内容确保科学性和系统性,结合课程目标,注重理论与实践相结合,使学生全面掌握V-F转换器的相关知识。
目录摘要 (1)第一章设计指标 (2)1.1 设计概述 (2)1.2 设计任务 (2)1.3 性能指标要求 (2)第二章系统概述 (3)2.1 设计思想 (3)2.2 可行性分析 (3)2.2 各模块的组成 (4)1. 输入信号 (4)2. 交流放大电路 (4)3.转换电路 (5)4. 单稳电路 (6)5.滤波电路 (8)6. 直流信号放大电路 (8)第三章单元电路设计与分析 (10)3.1 输入信号 (10)3.2 交流放大电路 (10)3.3 负极性信号滤除电路 (11)3.4 转换电路 (12)3.5 微分电路 (12)3.6 单稳电路 (13)3.7 滤波电路 (13)3.8 直流信号放大电路 (14)第四章电路的组构与调试 (15)4.1 调试方法及注意事项 (15)4.2 遇到的主要问题 (15)4.3 现象分析与解决措施 (15)4.4 测试数据与误差分析 (16)4.5 电路仪器仪表说明 (17)1.电路说明及改进意见 (17)2.主要仪器仪表说明 (17)3.元器件说明 (17)第五章总结 (18)附录 (19)参考文献 (20)摘要本设计利用EWB软件平台环境进行电路设计和原理仿真,选取合适的电路参数,通过输出波形的直流电压值测试线性F/V转换器的运行情况。
并且在硬件设计平台上搭建电路,进行电路调试,通过数字万用表观测电路的实际输出电压值。
主要模块分为交流信号放大电路、转换电路、单稳电路、滤波电路、直流信号放大电路等,设计最终实现了基本指标要求。
第一章设计指标1.1 设计概述线性F/V转换在很多场合均有应用,如涡轮流量计、脉冲转速表、调频遥测技术中恢复原始信号等。
它把输入的频率信号直接变换成直流电压输出信号,并且此直流电压输出与输入信号的频率成正比。
通过本次课程设计,在了解线性F/V转换器设计原理及其构成的基础上,利用集成运算放大器、单稳电路、滤波电路以及信号放大电路等构成整个小系统,设计完成一个线性F/V转换器,通过改变输入信号的频率,实现对直流输出电压的线性变换。
东华大学线性V/F转换课程设计报告信息科学与技术学院目录一、设计概述 (1)二、设计任务及要求 (2)(1)设计任务 (2)(2)性能指标要求 (2)三、设计方案选择 (2)1.方案一及框图 (3)2.方案二及框图 (3)3.方案原理优缺点比较 (4)四、设计思路 (4)1、输入信号:电源分压电路 (5)2、阻抗变换:电压跟随器 (5)3、基准源 (6)4、积分电路 (6)5、脉冲输出电路 (7)6、开关电路 (8)7、总电路图 (9)五、计算机仿真 (10)六、实际组装与调试 (11)1.电路器件表 (11)2.总输出波形 (12)3.实际连接电路 (13)4.组装和调试过程 (13)七、数据分析及改进 (14)(1)数据处理 (14)(2)数据分析 (14)(3)根据数据分析所得改进方法 (15)八、心得与体会 (16)九、参考文献 (17)十、附录 (17)一、各器件引脚图 (17)二、手绘电路图 (17)一、设计概述线性V/F转换器是压控振荡器中完成外加电压和输出频率线性变换的部分。
通过本次课程设计,应在了解线性V/F转换器设计原理及构成的基础上,利用集成运算放大器、积分电路以及脉冲电路等构成整个小系统,通过改变输入电压,实现对信号输入频率的线性变换。
二、设计任务及要求(1)设计任务选取基本集成放大器LF353、555定时器、三极管、电阻、电容和稳压管等元件,设计并制作一个简易线性V/F转换器。
首先在multism仿真软件上进行电路设计和原理仿真,选取合适电阻参数,通过输出波形的频率测试线性V/F转换器的运行情况。
其次在硬件设计平台上搭建电路,并进行调试,通过示波器观测电路的实际输出波形。
最后将电路实际输出波形与理论分析和仿真结果进行比较,分析产生误差的原因并提出改进方法。
(2)性能指标要求●电源电压:±12V ;●输入信号:直流信号0 ~10V可变;●输出信号:频率为0~10kHz对应;●精度:误差小于±30Hz;●波形要求:脉冲宽度20~40μs、0 ~10V矩形波。
三、设计方案选择1.方案一及框图(1)方案一:用压频转换器件(AD650)与单片机(51或msp430系列)结合使用。
原理图如下:原理简述如下:输入信号输入压频转换器件,得到一定频率信号,采用单片机的计数器/定时器来测量频率,并对结果通过外围电路进行调控进而得到非常理想的电压--频率的线性转换关系。
2.方案二及框图(2)方案二,利用反向积分器,以及555单稳态触发器,三极管模拟控制开关搭建电路。
原理图如下:原理简述如下:直流电压信号经过阻抗变换后送到积分器输入端,得到三角波,以控制脉冲输出,脉冲的高低电平来控制反馈中的模拟开关闭合与断开。
通过设置参数使积分器输出过零时触发脉冲输出电路开始输出Tw宽度脉冲,周而复始形成振荡,得到输出频率与输入信号呈线性关系。
3.方案原理优缺点比较方案一,在10KHZ频率范围内,AD650的线性误差度仅为20ppm(满量程的0.002%),精度符合要求,但是相关器件太贵,且没有相关器材,所以不选择此方案。
方案二,555单稳态,以及模拟开关(三极管),353积分电路搭建的电路,实现的压频转换在10Khz范围内,能实现相当高的转换精度,大约在几HZ左右(干扰过大除外),且器件均为常见的简易器件,电路搭建方便,易于操作和理解。
在满足设计任务的条件下,经济实惠,具有较高的性价比,故选择此方案二。
四、设计思路本实验线性V/F转换电路的设计,主要由积分电路,脉冲输出电路,反馈控制电路组成。
总电路的设计:通过阻抗变换得到相应输入电压,并输入积电路得到脉冲输出电路的电压控制信号(锯齿波),经由脉冲来控制反馈中的三极管的导通和关闭,实现通过基准源来调控积分时间的长短,来进一步调控脉冲输出(矩形波)的电压控制信号(锯齿波)如此周而复始,形成震荡,实现电压到频率的线性转换。
1、输入信号:电源分压电路电源电压为12v,电压输出范围为0~10v,所以选择一个R0=2k Ώ的电阻与一个10kΏ的滑动变阻器串联,电压可调最大值为10v ,可以满足0~10v所有值,符合要求。
2、阻抗变换:电压跟随器共集电路的输入高阻抗,输出低阻抗的特性,使得它在电路中可以起到阻抗匹配的作用,能够使得后一级的放大电路更好的工作。
电压隔离器输出电压近似输入电压幅度,并对前级电路呈高阻状态,对后级电路呈低阻状态,因而对前后级电路起到“隔离”作用。
基本原理还是利用它的输入阻抗高和输出阻抗低之特点,即输出电压不受后级电路阻抗影响。
一个对前级电路相当于开路,输出电压又不受后级阻抗影响的电路当然具备隔离作用,即使前、后级电路之间互不影响。
为保证输入电压0~10v不变,则必须保证其滑变的传入电路阻抗不变,加入一个电压跟随器,可以使后续电路不影响滑变的阻抗,使输入电阻保持不变,反馈电路中接一电阻,以平衡输入端,提高跟随精度。
3、基准源使用一个3v的稳压管,接入电路即可,能提供一个-3v的稳定电压。
选择R10为1kΏ电阻保护稳压管。
4、积分电路利用集成运放可以构成精度高、线性好的压控振荡器。
积分电路输出电压变化的速率与输入电压的大小成正比,如果积分电容充电使输出电压达到一定程度后,使它迅速放电,然后输入电压再给它充电,如此周而复始,产生振荡,其振荡频率与输入电压成正比,即压控振荡器。
积分电路采用运放构成的反相积分电路,运放的同相端接入10k Ώ的失调电阻,反向端同样串入一个5.1kΏ的电阻,然后再与10k Ώ滑变串接,保证其对称性,减少失调电流引起的误差。
滑动变阻器可以调节输出锯齿波的周期,二极管起到保护运放的作用。
5、脉冲输出电路单稳态触发器只有一个稳定状态,一个暂稳态。
在外加脉冲的作用下,单稳态触发器可以从一个稳定状态翻转到一个暂稳态。
由于电路中RC延时环节的作用,该暂态维持一段时间又回到原来的稳态,暂稳态维持的时间取决于RC的参数值。
脉宽Tw=1.1RC,R7=3kΏ ,C2=0.01uf由计算得Tw=33us,此电路构成单稳态触发器,当积分电压过零时触发单稳(VC≤1/3VCC)。
输出宽度一定的脉冲去控制积分器。
所以当U0=0V时,单稳态触发电压:Vc=1/3VCC=4v,则Vc=R2/(R2+R3)=1/3VCC从而推导出R2与R3的关系: R2:R3=1:2,取R2为1 kΏ,则R3为2 kΏ。
6、开关电路晶体三极管的实际开关特性决定于管子的工作状态。
晶体三极管输出特性三个工作区,即截止区、放大区、饱和区。
如果要使晶体三极管工作于开关的接通状态,就应该使之工作于饱和区;要使晶体三极管工作于开关的断开状态,就应该使之工作于截止区,发射极电流iE=0,这时晶体三极管处于截止状态,相当于开关断开。
积分电路先对基准源进行定时线性积分到一定电压高度Uh,触发脉冲输出F控制积分电路自动切换到对输入信号反向积分,到积分电压过零时积分控制电路又转为对基准源积分。
周而复始形成震荡,产生脉冲输出。
电路采用二次积分方法进行转换,当恒定宽度正脉冲输出时,信号反馈到输入端控制开关闭合。
此时积分器对-Ur进行正向积分,而积分电压Uc的高度Uh与基准电压以及充放电常数有关。
一旦输出脉冲消失,开关S截止,积分器对Ui反向积分直到过零。
相关参数的计算:由设计任务分析得到,R8与R9是偏置电阻,其必须满足当脉冲输出电路为低电平(即为“0”)时,三极管不导通,即是b和e电位差小于管压降0.7,Ve=-3v,则Vb的取值为小于-2.3v,所以此时: Vb=-R8/(R8+R9)*Vcc。
设R8=R9=1kΏ ,则此时,Vb=-R8/(R8+R9)*Vcc =-6v<-2.3v,满足条件,脉冲输出电路输出电压为高电平(即为“1”)时,此时满足Vb>-2.3v,Vb=R8/(R8+R9)*(Vi+Vcc)=-1V>-2.3V,满足条件,三极管导通,进而可以通过一定输出宽度的脉冲可以控制积分器的积分动作。
对于R10的选取:为了防止流入稳压管的电流过大,接入一个限流电阻,取R10=1kΏ。
7、总电路图五、计算机仿真multism仿真图像:仿真调试相关事项:(1)滑动变阻器Rw2主要调节整个电路的周期,对脉冲宽度影响很小,使其周期满足条件要求,电阻R3主要来调节脉冲宽度,使脉冲调到要求范围内。
(2)为了满足脉冲的宽度在20us~40us,因为Tw=1.1RC,R3为单稳触发器的6 、7脚所接电阻,取电容C=0.01uf时,电阻R7=3kΏ时即可满足。
(3)为了要满足产生脉冲的频率和输入电压误差在所要求的范围内(30Hz),通过调节滑动变阻器Rw2可逐步实现误差达到理想的范围内,观察仿真波形和周期选择满足条件的阻值。
(4)考虑到流过稳压管的电流范围,三极管基集电阻设定为R10=1K 欧左右时可以满足。
(5)为了保护运放,在反向积分电路中加入了二极管。
使积分输出端为0时,反向截至。
(6)如果三角波的幅值没达到要求,可以通过调节三极管集电极的电阻来控制产生的锯齿波的幅值。
六、实际组装与调试2.总输出波形(1)Ui=5V(2)Ui=10v脉宽、频率与理想状态基本保持一致,符合要求。
3.实际连接电路4.组装和调试过程(1)器件参数的选择经过各个模块参数的详细计算,基本可以确定电阻和电容等器件参数的选取。
电路图中C取0.01uf、Rw1、Rw2为10千欧滑动变阻器、R0为2千欧、R6为5.1千欧,R1为1千欧,R2为2千欧,R3为3千欧,R7、R8、R9、R10都为1千欧。
(2)电路连接电路连接过程需要特别细心,我曾因为电路连接错误而花了一下午的时间找出错误,最后采取分块检查错误的方法改正了电路,即刻出现稳定的脉冲波。
检查积分器时,用函数发生器输入方波,能出三角波,则积分器工作,反之,则不工作。
检查555时,输入一定幅值的矩形波,如果555能输出矩形波,则正常工作,反之则不工作。
(3)调节误差使用设定好参数的电阻,但出的波形频率却和仿真结果有很大差距,因此需要自己调节Rw2找出合适阻值,不能完全依照仿真结果。
调节滑动变阻器使当输入信号为10v时,输出信号频率非常接近10kHz ,然后改变输入电压,观察输出频率是否满足误差范围,不满足则反复调节Rw2,直到满足30Hz误差以内。
七、数据分析及改进(1)数据处理注:电压均为跟随器的输入电压。
(2)数据分析作电压和频率图像,可以求出频率和电压的线性关系。
如图可以看出,基本为线性关系。
由上述实验数据分析可以看出:本次课程设计设计的电路基本上将误差控制在了几HZ 的误差以内,在误差允许范围内基本符合了要求,这些误差很有可能是来自电源不稳定,测量读数不准,测量仪器显示精度,导线电阻不可忽略,接触不良等方面造成的误差,虽然会有部分因器件,导线之间相互作用产生的感抗,容抗,引起的误差,由以上数据看出但其对精度影响并不大,所以总体来说设计电路基本符合实验要求。