汽车转向灯控制器内部电路图
- 格式:doc
- 大小:44.50 KB
- 文档页数:1
转向灯电路图工作原理
转向灯电路图工作原理:
该电路图用于控制车辆的转向灯开关。
主要由以下组件组成:
1. 电源:提供电路所需的电能。
2. 电阻:限制电流流过电路,并保护其他电子元件。
3. 电线:将电流从电源传输到其他电子元件。
4. 开关:控制转向灯的开关状态。
5. 转向灯:发出指示车辆转向方向的光信号。
电路工作原理如下:
1. 当车辆的转向灯开关处于关闭状态时,电流无法通过转向灯电路。
此时,转向灯不亮。
2. 当车辆的转向灯开关处于打开状态时,电流可以从电源通过开关进入转向灯电路。
3. 电流首先经过电阻,限制了电流的流动。
接着,电流从电阻进入转向灯。
4. 转向灯接收到电流后,发出光信号,指示车辆的转向方向。
5. 当转向灯开关关闭时,电路断开,电流无法通过转向灯电路,转向灯熄灭。
通过这种工作原理,该电路可以实现对车辆转向灯的控制。
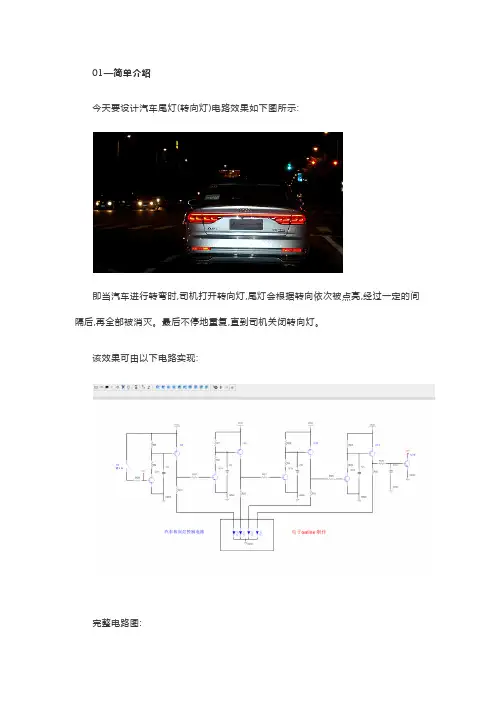
01—简单介绍今天要设计汽车尾灯(转向灯)电路效果如下图所示:即当汽车进行转弯时,司机打开转向灯,尾灯会根据转向依次被点亮,经过一定的间隔后,再全部被消灭。
最后不停地重复,直到司机关闭转向灯。
该效果可由以下电路实现:完整电路图:02—电路设计要点延时电路的要点主要有两个:一、当转向开关被按下时,LED需要逐个亮起;二、LED被逐个点亮的过程具有重复性。
03—效果展示一、当转向开关被按下时,LED需要逐个亮起;二、LED被逐个点亮的过程具有重复性。
04—工作原理一、电路中的控制LED电源的是PNP三极管(Q3/Q4/Q12/Q13),其导通的条件是对应的NPN三极管需要导通。
在司机没有按下转向灯的情况下,NPN没基极电流Ib,所以NPN不导通,对应的PNP也不会导通,所以转向灯开关不按下,灯不会亮。
二、当转向开关被按下时,NPN流过Ib电流,所以NPN导通,此时PNP也会流过Ib电流,PNP也会导通。
所以LED获得电压,从而被点亮。
undefined三、当第一个Q3开通后,Q14就会流过Ib,所以Q14也会导通。
但是由于C7的电压=Vcc,所以Q4必须要等C7的电压经过Q14释放后才会导通。
从而实现了LED 间具有一定的导通时间间隔。
四、剩下的两个LED的控制原理与第二个LED的控制原理相同。
其LED的间隔导通时间可以通过设置电容大小来调节。
五、最后是重复功能的实现。
由于四个LED的控制信号是级联的,要想全部关闭,只需要把第一个LED电源给关了就可以。
所以我们可以在最后一端加一个三极管电路来控制第一级的控制信号。
六、重复时间的长短与电容C13的大小成正比。
05—总结该电路的工作逻辑较简单,整个电路可分为三部分:1、电源控制电路;2、时间控制电路;3、重复控制电路。
以上电路都是利用了基本元器件的工作特性,如果你发现有不能够理解的地方,说明你的基础需要补补了。
汽车转向灯单片机c语言程序及其原理图项目1 汽车转向灯XTAL218XTAL119ALE 30EA31PSEN 29RST9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435 P0.5/AD534P0.6/AD633P0.7/AD732P2.7/A1528P2.0/A821P2.1/A 922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427P1. 01P1.12P1.23P1.34P1.45P1.56P1.67P1.78P3.0/RXD 10P3.1/TXD 11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115U180C52R110kR2330D1SW1R3330D2R410kSW2SW3附:C 程序源代码#includesbit sw1=P1^0; //定义P1.0引脚位名称为P1_0 sbit sw2=P1^1; sbit sw3=P1^2;sbit ledl=P0^0; //定义P0.0引脚位名称为P0_0 sbit ledr=P0^1;void delay(unsigned char k) {unsigned char i,j; for(i=0;i<k;i++)< p="">for(j=0;j<200;j++); }void main() //主函数 {P1=0xff; while(1) {if(sw1==0) ledl=0; if(sw2==0) ledr=0; if(sw3==0){ledl=0;ledr=0;}delay(200);ledl=1;ledr=1;delay(200);}}#include#include#define uchar unsigned char#define uint unsigned intuchar code DSY_CODE[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E,0xbf};uchar code df_table[]={0,1,1,2,3,3,4,4,5,6,6,7,8,8,9,9};uchar currentT=0;uchar HOUR,MIN,SECOND,count_t0,count_t1;uchar temp_value[]={0x00,0x00};uchar display_digit[]={0,0,0,0};uchar time_or_temperature;sbit DQ=P3^3;sbit SPK=P3^4;bit flag;bit ds18b20_is_ok=1;bit key_flag=0;void delay(uint x){while(--x);}void delay1ms(uint m){uchar i;while(m--) for(i=0;i<120;i++);}uchar init_ds18b20()uchar status;DQ=1;delay(8);DQ=0;delay(90);DQ=1;delay(8); status=DQ;delay(100);DQ=1;return status;}uchar readonebyte(){uchar i,dat=0;DQ=1;_nop_();for(i=0;i<8;i++)DQ=0;dat>>=1;DQ=1;_nop_();_nop_();if(DQ) dat|=0x80;delay(30);DQ=1;}return dat;}void writeonebyte(uchar dat){uchar i;for(i=0;i<8;i++){DQ=0;DQ=dat&0x01;delay(5);DQ=1;dat>>=1; } delay(8);}void read_temperature(){if(init_ds18b20()==1)ds18b20_is_ok=0;else{writeonebyte(0xcc);writeonebyte(0x44);init_ds18b20();writeonebyte(0xcc);writeonebyte(0xbe);temp_value[0]=readonebyte();temp_value[1]=readonebyte();ds18b20_is_ok=1;void display_temperature(){uchar i,j;//延时值与负数标识uchar t=150,ng=0;//高5位全为1(0xf8)则为负数,为负数时取反加1,并设置负数标识 if((temp_value[1]&0xf8)==0xf8){temp_value[1]=~temp_value[1];temp_value[0]=~temp_value[0]+1;if(temp_value[0]==0x00) temp_value[1]++;//负数标识置1ng=1;}//查表得到温度小数部分display_digit[0]=df_table[temp_value[0]&0x0f];//获取温度整数部分(高字节中的低3位与低字节中的高4位,无符号)currentT=((temp_value[0]&0xf0>>4))|((temp_value[1]&0x07)<< 4); //将整数部分分解为3位待显示数字display_digit[3]=currentT/100;display_digit[2]=currentT%100/10;display_digit[1]=currentT%10;if(ng==1){P2=0x01;P0=0xbf;delay1ms(11);P2=0x02;P0=DSY_CODE[display_digit[2]];delay1ms(11);P2=0x04;P0=DSY_CODE[display_digit[1]]&0x7f;delay1ms(11);P2=0x08;P0=DSY_CODE[display_digit[0]];delay1ms(11);}else{j=0x01;for(i=0;i<4;i++){P2=j;if(i==2) P0=DSY_CODE[display_digit[3-i]]&0x7f; else P0=DSY_CODE[display_digit[3-i]];delay1ms(11);j=_crol_(j,1);}}}void display(){uchar i,j,time[4];time[0]=HOUR/10;time[1]=HOUR%10;time[2]=MIN/10;time[3]=MIN%10;j=0x01;for(i=0;i<4;i++){P2=j;switch(i){case 1:P0=DSY_CODE[time[i]]&0x7f;break;case 3:if(flag==0) P0=DSY_CODE[time[i]]&0x7f; else P0=DSY_CODE[time[i]];break;default:P0=DSY_CODE[time[i]];}delay1ms(16);j=_crol_(j,1);}}/*void keyscan(){if(P1!=0xff) delay1ms(150);if(P1!=0xff){switch(P1){case 0xfe:HOUR=HOUR+1;if(HOUR==24) HOUR=0;break;case 0xfd:MIN=MIN+1;if(MIN==60) MIN=0; break;case 0xfb:time_or_temperature++; break;}}}*/void main(){uchar i=0;HOUR=0;MIN=0;SECOND=0;count_t0=0;count_t1=0;TMOD=0x11;TH0=0x3c;TL0=0xb0;TH1=0x3c;TL1=0xb0;EA=1;ET0=1;ET1=1;TR0=1;TR1=1;SPK=0;read_temperature();delay(5000);delay(5000);while(1){i=time_or_temperature%2;if(i==0) display();if(i==1){read_temperature();if(ds18b20_is_ok) display_temperature(); } //keyscan();}}void T0_int() interrupt 1 using 1{TH0=0x3c;TL0=0xb0;count_t0=count_t0+1;if(count_t0==10) flag=!flag;if(count_t0==20){count_t0=0;SECOND=SECOND+1;if(SECOND==60){SECOND=0;MIN=MIN+1;if(MIN==60){MIN=0;HOUR=HOUR+1;if(HOUR==24){HOUR=0;}}}}}void keyscan_t1() interrupt 3 using 2{count_t1=count_t1+1;TH1=0x3c;TL1=0xb0;if(P1!=0xff){key_flag=1;}if((count_t1==3)&&(P1!=0xff)&&(key_flag==1)) { count_t1=0;key_flag=0;switch(P1){case 0xfe:HOUR=HOUR+1;if(HOUR==24) HOUR=0; break;case 0xfd:MIN=MIN+1;if(MIN==60) MIN=0;break;case 0xfb:time_or_temperature++; break; }}if(count_t1>3){key_flag=0;count_t1=0;}}</k;i++)<>。

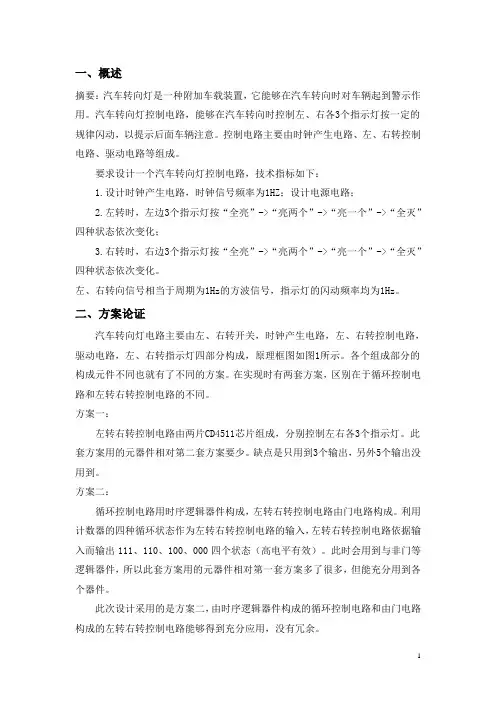
一、概述摘要:汽车转向灯是一种附加车载装置,它能够在汽车转向时对车辆起到警示作用。
汽车转向灯控制电路,能够在汽车转向时控制左、右各3个指示灯按一定的规律闪动,以提示后面车辆注意。
控制电路主要由时钟产生电路、左、右转控制电路、驱动电路等组成。
要求设计一个汽车转向灯控制电路,技术指标如下:1.设计时钟产生电路,时钟信号频率为1HZ;设计电源电路;2.左转时,左边3个指示灯按“全亮”->“亮两个”->“亮一个”->“全灭”四种状态依次变化;3.右转时,右边3个指示灯按“全亮”->“亮两个”->“亮一个”->“全灭”四种状态依次变化。
左、右转向信号相当于周期为1Hz的方波信号,指示灯的闪动频率均为1Hz。
二、方案论证汽车转向灯电路主要由左、右转开关,时钟产生电路,左、右转控制电路,驱动电路,左、右转指示灯四部分构成,原理框图如图1所示。
各个组成部分的构成元件不同也就有了不同的方案。
在实现时有两套方案,区别在于循环控制电路和左转右转控制电路的不同。
方案一:左转右转控制电路由两片CD4511芯片组成,分别控制左右各3个指示灯。
此套方案用的元器件相对第二套方案要少。
缺点是只用到3个输出,另外5个输出没用到。
方案二:循环控制电路用时序逻辑器件构成,左转右转控制电路由门电路构成。
利用计数器的四种循环状态作为左转右转控制电路的输入,左转右转控制电路依据输入而输出111、110、100、000四个状态(高电平有效)。
此时会用到与非门等逻辑器件,所以此套方案用的元器件相对第一套方案多了很多,但能充分用到各个器件。
此次设计采用的是方案二,由时序逻辑器件构成的循环控制电路和由门电路构成的左转右转控制电路能够得到充分应用,没有冗余。
原理框图如图1所示。
图1 汽车转向灯控制电路原理图三、电路设计1. 直流稳压电源电路直流稳压电源电路能为负载提供稳定的直流电源。
直流稳压电源的供电电源大都是交流电源,当交流供电电源的电压或负载电阻变化时,稳压器的直流输出电压都会保持稳定将脉动小的直流电变成不受外界影响的稳定的直流电输出。
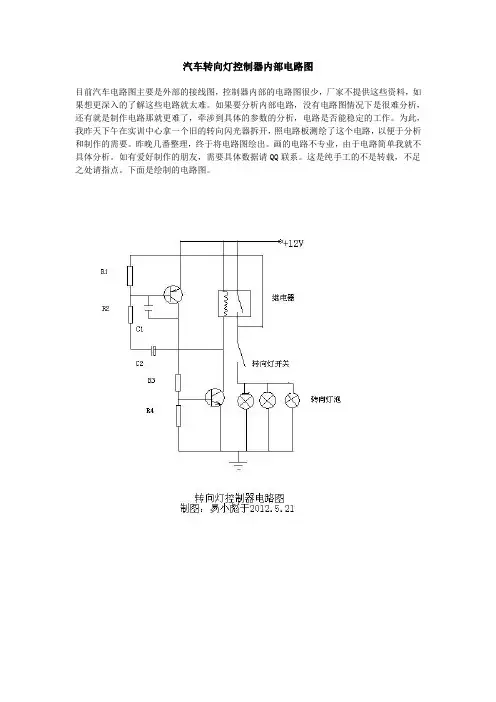
汽车转向灯控制器内部电路图
目前汽车电路图主要是外部的接线图,控制器内部的电路图很少,厂家不提供这些资料,如果想更深入的了解这些电路就太难。
如果要分析内部电路,没有电路图情况下是很难分析,还有就是制作电路那就更难了,牵涉到具体的参数的分析,电路是否能稳定的工作。
为此,我昨天下午在实训中心拿一个旧的转向闪光器拆开,照电路板测绘了这个电路,以便于分析和制作的需要。
昨晚几番整理,终于将电路图绘出。
画的电路不专业,由于电路简单我就不具体分析。
如有爱好制作的朋友,需要具体数据请QQ联系。
这是纯手工的不是转载,不足之处请指点。
下面是绘制的电路图。
理实一体化课堂教学安排
对照实物详细讲解二、元器件接线柱认识
1、中央接线盒
2、熔断丝、闪光继电器
闪光继电器:21
熔断丝:S19(10A),S4(15A)
对照实物
详细讲解
3、点火开关
4、危险警告灯开关
5、转向灯开关
左侧为转向灯开关,向左右两侧扳动开关可使左侧或右侧转向灯闪亮。
对照实物
详细讲解
学生总结
教师评价
6、转向灯
转向灯有两根线需要连接,如图:棕色为搭铁线,黑色为火线。
三、操作步骤
1、连接蓄电池正极到中央接线盒P6端子
2、连接中央接线盒P2端子到点火开关30接线柱
3、连接点火开关15接线柱到中央接线盒A8端子
4、连接中央接线盒B28端子到危险报警灯开关30接线柱
5、连接中央接线盒A13端子到危险报警灯开关15接线柱
6、连接危险报警灯开关49接线柱到中央接线盒A18端子
7、连接中央接线盒A10端子到转向灯开关49a接线柱
8、连接转向灯开关R接线柱到中央接线盒A7端子
9、连接转向灯开关L接线柱到中央接线盒A20端子
10、连接中央接线盒A10端子到危险报警灯开关49a接线柱
11、连接危险报警灯开关R接线柱到中央接线盒A7端子
12、连接危险报警灯开关L接线柱到中央接线盒A20端子
13、连接中央接线盒C8端子到右前转向灯M7。
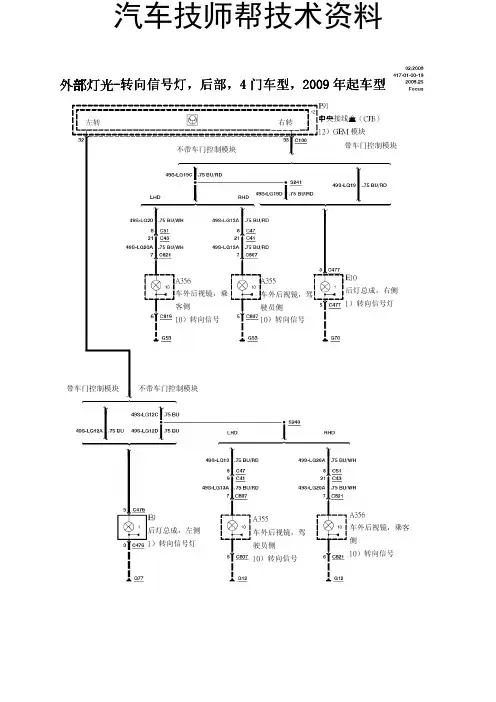
汽车转向灯、危险报警灯及其电路故障(即工作原理)一、转向灯及危险报警灯电路在汽车起步、转弯、变更车道或路边停车时,需要打开转向信号灯以表示汽车的趋向,提醒周围车辆和行人注意。
转向信号灯系统由闪光继电器(简称闪光器)、转向开关、转向灯和转向指示灯等组成。
当接通危险报警信号开关时,所有转向信号灯同时闪烁,表示车辆遇紧急情况,请求其他车辆避让。
根据GB 7258—1997 机动车运行安全技术条件》规定,危险报警灯操纵装置不得受点火开关控制。
转向灯闪烁是由闪光器控制电流通断实现的,闪光频率规定为1.5HZ±0.5HZ。
有的车转向信号闪光器和危险报警闪光器共用,例如TJ7100轿车,如图6-20所示,还有的车转向信号闪光器和危险报警闪光器单独设置,例如切诺基汽车,如图6-21所示。
二、闪光器的工作原理常见闪光器有电容式、翼片式、晶体管式三类(图6-22)。
翼片式和带继电器的晶体管式闪光器结构简单体积小、闪光频率稳定、监控作用明显、工作时伴有响声,故被广泛使用。
1.电容式闪光器电容式闪光器结构如图6-23所示,它由一只大容量电解电容器和双线圈继电器组成。
工作原理:接通转向灯开关(左或右)后,串联线圈经触点、转向信号灯构成回路,且电流较大。
产生较强磁场,吸动衔铁,使触点张开。
此过程中,串联线圈通电时间极短,转向信号灯不亮。
触点张开后电容器经串联线圈、并联线圈、转向灯开关、转向灯及转向指示灯构成充电回路.由于充电电流很小,此时转向灯与转向指示灯不亮。
触点在串并联线圈的合成磁场(方向相同)作用下,仍保持张开状态。
电容器充足电后.并联线圈电流消失,铁心吸力减小,触点在复位弹簧作用下闭合,转向灯与转向指示灯亮;同时,电容器经并联线圈及触点放电,由于串联线圈与并联线圈磁场方向相反,铁心吸力极小,触点保持闭合状态。
当电容器放电结束后,并联线圈电流消失,在串联线圈磁场作用下,触点再次张开,转向灯与转向指示灯变暗,电容器再次充电。
第10章 车身电气系统 189
1—变光开关 2—前照灯继电器 3—变光继电器 4—远光指示灯
图10-2 继电器控制灯系
10.1.2 前照灯常见故障诊断
前照灯常见故障诊断见表10-1。
表10-1
前照灯常见故障诊断 故 障 现 象
故 障 原 因
某一侧灯光暗淡 ① 搭铁不良
② 变光开关接触不良
两侧灯光均暗淡 ① 发电机输出电压过低
② 熔断器松动
③ 导线插接不牢
④ 开关接触不良
⑤ 继电器触点烧蚀
远光灯或近光灯不亮 ① 远光灯或近光灯熔断器断开
② 灯光总开关损坏
③ 变光开关损坏
④ 导线断路
⑤ 灯光继电器损坏
远光灯和近光灯均不亮 ① 电源总熔断器熔断
② 灯光总开关损坏
③ 前照灯继电器损坏
灯泡经常烧毁 发电机输出电压过高 10.2 转 向 灯
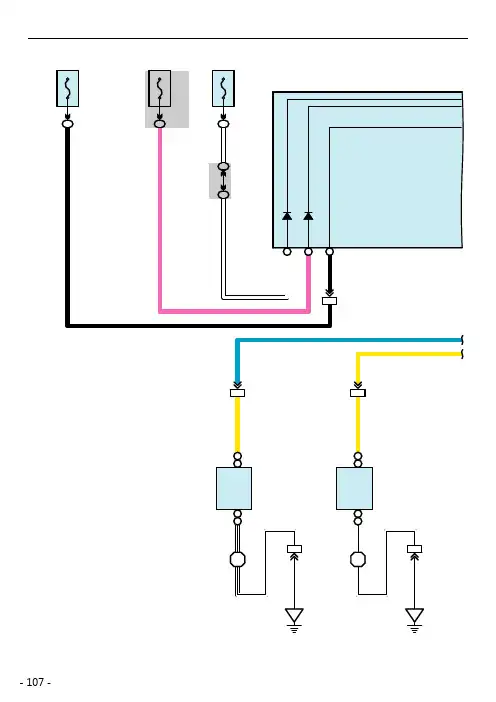
10.2.1 转向灯控制电路
当接通转向灯时,转向灯电路中的闪光继电器提供脉冲电流,使转向灯闪烁。
汽车转向灯控制器内部电路图
目前汽车电路图主要是外部的接线图,控制器内部的电路图很少,厂家不提供这些资料,如果想更深入的了解这些电路就太难。
如果要分析内部电路,没有电路图情况下是很难分析,还有就是制作电路那就更难了,牵涉到具体的参数的分析,电路是否能稳定的工作。
为此,我昨天下午在实训中心拿一个旧的转向闪光器拆开,照电路板测绘了这个电路,以便于分析和制作的需要。
昨晚几番整理,终于将电路图绘出。
画的电路不专业,由于电路简单我就不具体分析。
如有爱好制作的朋友,需要具体数据请QQ联系。
这是纯手工的不是转载,不足之处请指点。
下面是绘制的电路图。