机构设计公差分析_SVV
- 格式:ppt
- 大小:4.18 MB
- 文档页数:65

机器设计中机构的位置误差与位置度公差分析作者:李红娟冶存良孟刚来源:《科技风》2018年第09期摘要:本文论述了机器设计中间隙配合引起的构件位置变化对机构精度的影响。
详细分析了运动副间隙与机构位置误差、平行四杆机构配合间隙与杆长误差、孔系的位置度公差。
关键词:运动副;间隙;位置误差;孔系位置度公差在机构中,使工作构件产生运动误差的主要原因之一是由机构中各构件几何误差引起的。
而几何误差主要有:构件加工制造产生的几何参数变动、运动副配合间隙引起的构件位置的变化以及构件弹性变形和热变形引起的几何参数变动等[1]。
这些变动都对机构精度产生一定的影响。
本文仅从运动副间隙引起构件位置变化及孔系配合的位置度公差对机构精度的影响进行分析。
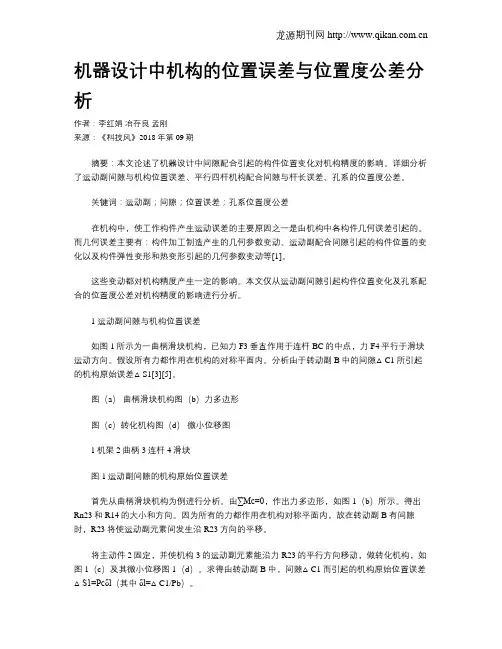
1 运动副间隙与机构位置误差如图1所示为一曲柄滑块机构,已知力F3垂直作用于连杆BC的中点,力F4平行于滑块运动方向。
假设所有力都作用在机构的对称平面内。
分析由于转动副B中的间隙△C1所引起的机构原始误差△S1[3][5]。
图(a)曲柄滑块机构图(b)力多边形图(c)转化机构图(d)微小位移图1机架2曲柄3连杆4滑块图1运动副间隙的机构原始位置误差首先从曲柄滑块机构为例进行分析。
由∑Mc=0,作出力多边形,如图1(b)所示。
得出Rn23和R14的大小和方向。
因为所有的力都作用在机构对称平面内,故在转动副B有间隙时,R23将使运动副元素间发生沿R23方向的平移。
将主动件2固定,并使机构3的运动副元素能沿力R23的平行方向移动,做转化机构,如图1(c)及其微小位移图1(d)。
求得由转动副B中,间隙△C1而引起的机构原始位置误差△S1=Pcδl(其中δl=△C1/Pb)。
2 平行四杆机构中配合间隙与杆长误差如上所述,运动副间隙对机构位置的影响,是运动副间隙不利的一面。
在螺栓和螺钉联接中,往往是一组孔,又称为孔系。
此时,孔系的位置度公差,取决于孔与紧固件之间的最小间隙。
对于平行四杆机构中配合间隙与杆长误差的关系来说,他们都是孔、轴联结形式,都要求孔轴之间要有间隙,只是间隙的功能不同。
公差与配合的基础知识
公差和配合是机械制造工艺中非常重要的概念,用于描述工件尺寸之间的关系。
公差指的是零件尺寸与其设计尺寸之间的差值,用来确定零件允许的尺寸范围。
配合则是指在不同零件之间的相对尺寸关系,用来确定零件之间的相对位置关系和相互作用。
公差分为基本公差和限制公差两种。
基本公差是指在设计过程中就考虑到的,能够满足零件的功能和使用要求的最小公差,一般是与零件的重要性和制造工艺性有关。
而限制公差则是制造过程中需要考虑到的外部因素引入的公差,如生产设备精度、材料性质和变形等。
配合包括过盈配合、间隙配合和干涉配合三种。
过盈配合是指零件之间的尺寸设计上有一定的重叠,以保证在组合时会产生一定的压力或压力矩,达到稳定和传递动力的效果。
间隙配合则是指允许一定的间隙,以保证零件之间的相对运动和方便拆卸。
干涉配合是指设计上两个相对配合的零件会发生部分重叠,这种配合适用于实现旋转运动或传输扭矩的设备。
利用CAD软件进行机构设计和分析CAD软件是一种强大的工具,可用于机构设计和分析。
在现代工程中,机构是指由互相连接的零件组成的系统,用于实现特定的功能。
从简单的手动机构到复杂的自动化系统,CAD软件可以帮助工程师们更高效、准确地进行设计和分析。
本篇文章将介绍如何利用CAD软件进行机构设计和分析,并提供一些有用的技巧。
首先,要进行机构设计,需要了解机构设计的基本原理。
机构设计是通过选择和配置适当的连杆、齿轮、带传动等元件,使得机构在运动过程中满足特定要求。
常见的机构设计目标包括位置、速度和加速度等方面的要求。
在CAD软件中,可以使用各种工具和命令来创建和配置机构的各个部件。
在CAD软件中进行机构设计的第一步是创建零件。
利用CAD软件提供的绘图工具,可以绘制连杆、齿轮等元件的几何形状。
在绘制零件时,需要考虑它们的尺寸、形状和材料等因素。
CAD软件通常提供了多种绘图工具和命令,如绘制直线、弧线和多边形,以及修剪、拉伸和旋转等编辑工具。
创建零件后,下一步是组装机构。
在CAD软件中,可以使用装配工具将不同的零件组合到一起,形成完整的机构。
装配工具通常提供了各种约束条件,如固定、平行、垂直和轴向等,可以帮助确保零件之间的正确位置和运动。
在进行机构装配时,需要根据设计要求选择适当的连接方式和约束条件。
完成机构的装配后,下一步是进行机构的分析。
机构分析是评估机构在运动过程中的性能和行为。
其中一个常见的分析方法是运动学分析,它可用于确定机构各个部件的位置、速度和加速度。
在CAD软件中,可以使用运动模拟工具或动力学分析工具来进行运动学分析。
这些工具通常提供了绘制位置、速度和加速度曲线的功能,可以帮助工程师们更好地理解机构的行为。
此外,CAD软件还提供了其他有用的工具和功能,如材料库和模型库等。
材料库可以帮助工程师们选择合适的材料,以满足机构的强度和刚度要求。
模型库包含了各种标准零件和组件的模型,可以加快机构设计的速度。
一、常出现的机构设计方面的问题。
1.Vibrator (振子)vibrator安装位置的选择很重要。
其一,要看装在哪儿振动效果最好;其二,最好vibrator附近没有复杂的rib(筋骨)位,因为vibrator在ALT 时会有滑动现象,如碰到附近的rib位可能被卡住,致使来电振动失败。
2.吊饰孔由于吊饰孔处要承受15磅的拉力,所以housing(住房)的吊饰孔处的壁厚要保证足够的强度。
3.Sim card slot(SIM卡插槽)由于不同地区的sim card(sim卡)的大小和thickness(厚度)有别,所以在进行sim card slot 的设计时,要保证最大、最厚的sim card能放进去,最薄的sim card能接触良好。
4.Battery connector(电池连接器)有两种形式:针点式和弹簧片式。
前者由于接触面积小,有可能发生瞬间电流不够的现象而导致reset(重启),但占用的面积小。
而后者由于接触面积大,稳定性较好,但占用的面积大。
5.薄弱环节海绵在drop test(跌落测试)时,手机的头部容易开裂。
主要是因为有结合线和结构复杂导致的注塑缺陷。
Front housing(前壳)的battery cover button(电池盖按钮)处也易于开裂,所以事先要通过加rib(筋骨)和倒角来保证强度。
6.和ID的沟通。
机构完成pcb的堆叠后将图发给ID,由于这关系到ID画出来的外形能否容纳所有的内部机构,所以在处理时要很小心。
Pcb上的所有的元件都要取正公差,所包含的元件要齐全,特别是那些比较大的元件;小处也不能忽略,比如sponge(海绵)和lens(镜片)的双面背胶等。
7.缩水常发生部位boss与外壳最好有0.8-1mm的间隙,要避免boss和外壳连在一起而导致缩水。
housing(后壳)上antenna(天线)部分,由于结构需要(要做螺纹),往往会比较厚。
8.前后壳不匹配95%情况下,手机的后壳都会大于前壳,所以要提醒模厂,让它在做模时,后壳取较小的收缩率。
机构设计公差分析培训一、培训内容1.公差概念及意义公差是指由制造工艺等因素引起的零件尺寸之间的差异,是保证零件装配性能和质量的重要参数。
公差分析能够帮助工程师了解零件之间的相互关系,确定零件的可接受尺寸范围,保证产品的性能和质量。
2.公差设计原则在进行机构设计时,需要根据产品的使用环境、功能要求等因素来确定公差的设计原则。
比如,对于高精度的产品,需要更严格的公差要求,而对于一般产品则可以放宽一些公差范围。
3.公差分析工具介绍一些常用的公差分析工具,比如计算机辅助设计软件中的公差分析模块,以及一些专业的公差分析软件等。
并对这些工具的使用方法进行详细的介绍和实际操作演练。
4.公差分析方法介绍公差分析的一些常用方法,比如最大公差法、最小公差法、等概率公差法等。
并结合实际案例进行详细的分析和讲解,培训学员如何在实际工作中灵活应用这些方法。
5.公差分析案例通过一些典型的机构设计案例,对公差分析的实际应用进行详细的分析和讲解。
让学员能够在实际工作中学会如何进行公差分析,提高他们的实际操作能力。
二、培训目标1.确保产品质量通过公差分析的培训,使得每位工程师都能够深入理解公差对产品质量的重要性,确保产品在设计阶段就考虑到公差的设置,从而提高产品的质量和性能。
2.提高设计效率熟练掌握公差分析的方法和工具,使得工程师在进行机构设计时,能够更快速、更准确地进行公差分析,提高设计效率。
3.降低零件成本合理的公差设计和分析能够有效地降低零件的成本,避免不必要的加工和装配成本,提高企业的竞争力。
4.增强团队合作通过公差分析的培训,使得团队成员能够更好地理解对方的工作,增强团队的协作能力,提高团队的整体效率。
三、培训形式1.理论培训通过专业的讲师进行公差分析的理论培训,讲解公差的概念、原则、方法和工具等内容。
引导学员深入理解公差分析的重要性和实际应用方法。
2.案例分析通过一些典型的机构设计案例,进行公差分析的详细分析和讲解,帮助学员更好地理解公差的实际应用,并提高他们的实际操作能力。

机械学中的机构设计与运动分析引言在机械学中,机构设计与运动分析是一个重要的领域。
机构设计涉及到机械系统的结构和功能设计,而运动分析则是对机构运动特性的研究。
本教案将以机构设计与运动分析为主题,分为三个小节进行讨论。
第一小节:机构设计的基本原理与方法(2000字)1.1 机构设计的概念与意义机构设计是指根据特定的功能需求,将各种机械元件按照一定的规则组合在一起,形成能够实现特定运动功能的机械系统。
机构设计的目标是使机构能够以最高效、最稳定的方式完成所需的运动任务。
机构设计在工程领域中具有重要的应用价值,可以用于设计各种机械装置和设备。
1.2 机构设计的基本原理机构设计的基本原理包括几何原理、运动学原理和力学原理。
几何原理是指通过几何形状和尺寸的设计来实现机构的运动功能。
运动学原理是指通过分析机构的运动特性,确定机构的运动学参数,如位移、速度和加速度等。
力学原理是指通过力学分析,确定机构在运动过程中的受力情况,以保证机构的稳定性和安全性。
1.3 机构设计的方法机构设计的方法包括经验法、分析法和优化法。
经验法是指根据设计者的经验和直觉进行设计,适用于简单的机构设计。
分析法是指通过数学模型和计算方法进行机构设计,适用于复杂的机构设计。
优化法是指通过优化算法和计算机辅助设计工具进行机构设计,以寻求最优的设计方案。
第二小节:机构运动分析的基本原理与方法(2000字)2.1 机构运动分析的概念与意义机构运动分析是指对机构的运动特性进行研究和分析,包括机构的位移、速度、加速度等运动参数。
机构运动分析在机构设计中具有重要的作用,可以用于评估机构的性能和稳定性,指导机构的优化设计。
2.2 机构运动分析的基本原理机构运动分析的基本原理包括运动学原理和动力学原理。
运动学原理是指通过几何和代数方法,研究机构的运动学关系,如位置、速度和加速度等。
动力学原理是指通过力学分析,研究机构在运动过程中的受力情况和力的传递规律。
2.3 机构运动分析的方法机构运动分析的方法包括图解法、分析法和仿真法。
公差分析一、误差与公差二、尺寸链三、形位公差及公差原则一、误差与公差(一)误差与公差的基本概念1. 误差误差——指零件加工后的实际几何参数相对于理想几何参数之差。
(1)零件的几何参数误差分为尺寸误差、形状误差、位置误差及表面粗糙度。
尺寸误差——指零件加工后的实际尺寸相对于理想尺寸之差,如直径误差、孔径误差、长度误差。
形状误差(宏观几何形状误差)——指零件加工后的实际表面形状相对于理想形状的差值,如孔、轴横截面的理想形状是正圆形,加工后实际形状为椭圆形等。
相对位置误差——指零件加工后的表面、轴线或对称面之间的实际相互位置相对于理想位置的差值,如两个面之间的垂直度,阶梯轴的同轴度等。
表面粗糙度(微观几何形状误差)——指零件加工后的表面上留下的较小间距和微笑谷峰所形成的不平度。
2. 公差公差——指零件在设计时规定尺寸变动范围,在加工时只要控制零件的误差在公差范围内,就能保证零件的互换性。
因此,建立各种几何公差标准是实现对零件误差的控制和保证互换性的基础。
(二)误差与公差的关系由图1(三)公差术语及示例图2以图2为例:基本尺寸——零件设计中,根据性能和工艺要求,通过必要的计算和实验确定的尺寸,又称名义尺寸,图中销轴的直径基本尺寸为Φ20,长度基本尺寸为40。
实际尺寸——实际测量的尺寸。
极限尺寸——允许零件实际尺寸变化的两个极限值。
两个极限值中大的是最大极限尺寸,小的是最小极限尺寸。
尺寸偏差——某一尺寸(实际尺寸,极限尺寸)减去基本尺寸所得到的代数差。
上偏差=最大极限尺寸-基本尺寸,用代号(ES)(孔)和es(轴)下偏差=最小极限尺寸-基本尺寸,用代号(ES)(孔)和es(轴)尺寸公差——允许尺寸的变动量尺寸公差=最大极限尺寸-最小极限尺寸公差带零线——在极限与配合图解中,标准基本尺寸是一条直线,以其为基准确定偏差和公差。
通常,零件沿水平方向绘制,正偏差位于其上,负偏差位于其下,如下图。
图3公差带图解公差带——在公差带图解中,由代表上极限偏差和下极限偏差的两条直线所限定的一个区域。
公差分析技术范文1.产品设计和尺寸规划:根据产品功能和性能要求,确定设计尺寸和公差范围。
2.公差传递路径分析:确定各个零部件之间的公差传递路径,即确定哪些尺寸对于产品最终功能的影响最大。
3.公差堆积分析:通过数学模型和计算方法,评估公差在各个尺寸链上的堆积情况,确定公差带宽。
4.公差单因素敏感性分析:通过对不同公差因素的敏感性分析,确定哪些公差因素对产品尺寸稳定性的影响最大。
5.公差优化和控制:根据分析结果,通过调整设计尺寸和公差范围,以及改进工艺控制和测量方法,优化产品尺寸稳定性。
公差分析技术的应用范围广泛,可以用于各种产品设计和制造过程中。
例如,在汽车制造中,公差分析技术可以应用于车身设计和装配过程中,以确保各个零部件的精确装配,防止噪音和泄漏等问题的发生;在电子产品制造中,公差分析技术可以应用于电路板设计和组装过程中,确保元器件的互换性和可靠性。
1.提高产品尺寸稳定性:通过对公差的控制和优化,能够降低产品尺寸偏差,提高产品尺寸稳定性。
2.提高产品可靠性:公差分析技术可以评估并控制产品各个零部件之间的公差堆积情况,减少因尺寸偏差而引起的故障和损坏。
3.提高工艺控制和装配效率:通过公差分析技术,可以确定关键尺寸和公差因素,并优化工艺控制和装配方法,提高生产效率和质量。
4.减少成本:公差分析技术可以避免因尺寸偏差引起的重工和报废,降低成本。
然而,公差分析技术也存在一些挑战和局限性。
首先,公差分析过程中需要进行大量的数据采集和计算,对数据处理和分析能力要求较高。
其次,公差分析结果可能受到测量误差、材料变化等因素的影响,需要合理考虑这些因素的影响。
此外,公差分析技术还需要与其他设计和制造方法相结合,才能更好地实现产品尺寸稳定性的控制。
总之,公差分析技术是一种重要的产品设计和制造工具,通过对公差的分析和优化,能够提高产品尺寸稳定性和可靠性,提高工艺控制和装配效率,降低成本。
然而,公差分析技术在应用过程中也需要考虑各种因素的影响,结合其他设计和制造方法,才能有效实现其目标。
伺服电动机装配之形位公差计算探讨形位公差是指零件之间的位置关系所允许的误差范围。
在伺服电动机的装配过程中,形位公差的计算和控制是非常重要的,因为它直接影响到整个伺服电动机的性能和精度。
本文将探讨伺服电动机装配过程中形位公差的计算方法和控制原则。
首先,形位公差的计算需要明确零件的最大材料条件(MMC)和最小材料条件(LMC)。
MMC是指零件尺寸可能的上限,LMC是指零件尺寸可能的下限。
在伺服电动机的装配过程中,需要根据设计要求和所用材料的特性确定MMC和LMC。
一般来说,MMC会碰到材料的上限,而LMC会接触材料的下限。
其次,形位公差的计算要考虑零件之间的相对位置关系和装配顺序。
在伺服电动机的装配过程中,通常使用基准和对准方式来确定零件之间的相对位置关系,从而计算形位公差。
基准可以是一个平面、一条线或一个点,而对准方式可以是平行、垂直、倾斜等。
基准和对准方式的选择要根据具体的装配要求和设计要求来确定。
然后,形位公差的计算需要根据GD&T(几何标准与公差)的原则进行。
GD&T是一种用于描述零件之间的形状、尺寸和位置关系的标准,它包括了形位公差的计算和控制原则。
在伺服电动机的装配过程中,需要根据GD&T的原则,确定各个零件的形位公差和装配顺序。
例如,如果需要保证两个零件之间的平行关系,可以使用平行度来表示,并根据GD&T的原则进行计算和控制。
最后,形位公差的控制需要在装配过程中进行。
在伺服电动机的装配过程中,需要使用适当的工具和设备来控制形位公差。
例如,可以使用测量工具和检验夹具来验证装配过程中的形位公差。
此外,还可以采取适当的调整和修整措施,来保证零件之间的形位公差在允许范围内。
总之,形位公差的计算和控制是伺服电动机装配过程中的重要环节。
通过明确MMC和LMC、确定基准和对准方式、遵循GD&T的原则,并使用适当的工具和设备,可以有效地计算和控制形位公差,从而保证伺服电动机的性能和精度。
机械设计基础机构设计机械设计是指将工程机械所需机构的机械零件按一定规律组合成能够实现工程机械的主要功能的装置。
在机械设计中,机构设计是非常重要的一部分。
机构设计旨在确定机械装置中各个零件的型式、尺寸、结构和相互之间的配合关系,以及制定实现装置功能所需的所有运动产生方法和元件。
一、机构设计的原则1. 机构设计应满足使用要求:机械装置的设计目的是为了实现其特定的功能,机构设计应根据使用要求来确定机构的类型和结构。
不同机械装置的功能不同,因此机构设计的原则也会有所差异。
2. 机构设计应具备经济性:机械装置的制造成本和使用成本是决定机构设计是否合理的重要因素。
在机构设计中,应尽量减少材料和加工成本,并且优化设计以提高机械装置的使用寿命和性能。
3. 机构设计应具备可靠性:机械装置在使用过程中需要承受一定的载荷和工作环境,机构设计应保证机械装置的可靠性,确保其在各种工况下都能正常运行。
二、机构设计的步骤1. 分析机械装置的功能需求:在进行机构设计之前,需要对机械装置的功能需求进行详细的分析和了解,明确机构设计的目标和要求。
2. 选择机构类型:根据机械装置的功能需求,选择适合的机构类型。
常见的机构类型有平面机构、点线机构、连杆机构等。
3. 确定机构的零件和参数:根据选择的机构类型,确定机构的零件和参数。
包括零件的型式、尺寸、材料等。
4. 进行机构的选型和配套:根据机构设计的要求,进行机构的选型和配套,确保机构的各个部件之间能够正常配合和运动。
5. 进行机构的分析和优化:进行机构的分析和优化,通过仿真和计算等方法,评估机构的性能和可靠性,并进行必要的优化调整。
6. 编制机构图纸:根据机构设计的结果,编制机构的详细图纸,包括各个零件的图纸和装配图等。
7. 进行机构的制造和组装:根据机构图纸,进行机构的制造和组装工作,确保各个零件能够正确地组装成完整的机械装置。
三、机构设计的案例分析以传输机构设计为例,传输机构是指将传动装置与工作装置连接起来,实现动力传递和工作装置运动的装置。
基于VisVSA技术的汽车装配公差分析刘壮【摘要】VisVSA is a kind of tolerance analysis software which offers high reliability calculation basis for mechanical system mounting with Monte Carlo that obeys normal distribution as the core of computation. This paper uses VisVSA to discuss different integrations in static and dynamic aspect. In many factors that affect assembling properties, the impact of mounting order on the gap and flush of door and the impact of mounting tolerance on steering angle of chassis system under design loads through comparative analysis are discussed.%VisvsA是一种以服从正态分布的蒙特卡罗法为计算核心,可以为机械系统装配提供高信度计算依据的公差分析软件.本文利用VisVSA技术对整车不同类型的集成分静态和动态两方面论述.在可能影响到装配性能的因素中,通过对比分析方式,重点论述了装配顺序对车门缝隙和面差的影响及装配公差在设计载荷下对底盘系统转向角度的影响.【期刊名称】《汽车技术》【年(卷),期】2011(000)001【总页数】5页(P57-61)【关键词】装配公差;VisVSA软件;动态公差;静态公差【作者】刘壮【作者单位】华晨汽车工程研究院【正文语种】中文【中图分类】U4621 VisVSA的应用流程及计算原理VisVSA软件通过动态模拟装配方式近似反映总成零部件在实际装配中的情况。
机械工程中的机构设计与分析机械工程是一门综合性的工程学科,涉及到机械系统的设计、制造、运行和维护等方面。
而机构设计与分析作为机械工程的重要组成部分,对于机械系统的性能和效能起着至关重要的作用。
一、机构设计的重要性机构是由若干个零部件组成的,能够实现特定运动和力学功能的装置。
在机械系统中,机构的设计是决定整个系统性能的关键。
一个合理设计的机构能够提高系统的工作效率,减少能量损失,并且具备较高的可靠性和稳定性。
机构设计的过程需要考虑多个因素,包括运动要求、力学特性、材料选择、制造工艺等。
在设计过程中,工程师需要根据实际需求和约束条件,选择合适的机构类型和参数,以实现所需的运动和力学功能。
二、机构设计的方法机构设计的方法有很多,其中常用的包括几何设计法、解析法和仿真分析法。
几何设计法是机构设计的基础,通过几何图形的构建和分析,确定机构的结构和参数。
这种方法适用于简单机构的设计,能够直观地展示机构的运动特性和工作原理。
解析法是一种基于数学模型的机构设计方法,通过建立机构的运动学和动力学方程,求解机构的运动和力学特性。
这种方法适用于复杂机构的设计,能够准确地预测机构的性能和行为。
仿真分析法是一种基于计算机模拟的机构设计方法,通过建立机构的虚拟模型,进行运动学和动力学仿真分析。
这种方法能够快速评估不同设计方案的性能,优化机构的结构和参数。
三、机构分析的目的和方法机构分析是对机构运动和力学特性进行评估和优化的过程。
机构分析的目的是为了验证机构的设计方案是否满足要求,并且找出可能存在的问题和改进的空间。
机构分析的方法包括实验测试和数值计算两种。
实验测试是通过搭建实际机构模型,进行运动学和动力学测试,得到机构的实际性能数据。
数值计算是通过建立机构的数学模型,利用计算机进行运动学和动力学仿真分析,得到机构的预测性能数据。
实验测试和数值计算相互补充,能够全面评估机构的性能。
实验测试能够直接观测机构的运动和力学行为,获取真实的性能数据。