激光雷达主要参数.
- 格式:pdf
- 大小:188.33 KB
- 文档页数:4
三维激光雷达参数-概述说明以及解释1.引言1.1 概述概述:三维激光雷达(3D LiDAR)是一种高精度、实时性强的传感器,用于测量物体与其周围环境之间的距离和位置关系。
它通过发射激光束,接收并分析返回的反射信号,从而获取三维空间中物体的准确位置和形状信息。
与传统的二维激光雷达相比,三维激光雷达能够提供更加详细和全面的环境感知,为自动驾驶、机器人导航以及城市规划等领域提供了强大的支持和应用前景。
三维激光雷达的参数是描述其性能和功能的重要指标,包括测距范围、角度分辨率、垂直分辨率、数据输出速率、扫描速度等。
测距范围是指激光雷达可以探测到物体的最远距离,决定了其适用于不同场景的能力。
角度分辨率和垂直分辨率则决定了激光束扫描的细腻程度和对小型物体的检测能力。
数据输出速率和扫描速度决定了激光雷达能够以多快的速度获取并处理环境信息。
三维激光雷达的应用领域广泛。
在自动驾驶领域,它可以实现高精度的地图构建、物体检测与跟踪以及障碍物避让等功能,为自动驾驶车辆提供实时的环境感知。
在机器人导航领域,它可以帮助机器人识别和定位物体,规划和执行路径,实现精确的操作和导航能力。
在城市规划和环境监测领域,它可以提供高精度的地图和物体分布信息,为城市规划和环境监测提供科学依据和参考。
未来,三维激光雷达技术将不断发展和完善。
随着自动驾驶和智能交通的兴起,对激光雷达的性能提出了更高的要求,包括更远的测距范围、更高的角度和垂直分辨率、更快的数据输出速率和扫描速度等。
同时,对于成本和功耗的要求也在不断提高。
因此,未来的三维激光雷达技术将更加注重性能的平衡和综合考量,以满足各个领域的需求。
总之,三维激光雷达作为一种重要的环境感知传感器,具有广泛的应用前景和发展潜力。
通过不断优化和创新,三维激光雷达将在自动驾驶、机器人导航和城市规划等领域发挥越来越重要的作用,为人们创造更加安全、智能和便利的生活环境。
文章结构部分的内容可以如下所示:1.2 文章结构本文主要分为三个主要部分:引言、正文和结论。
(完整版)无人机激光雷达扫描系统Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。
根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。
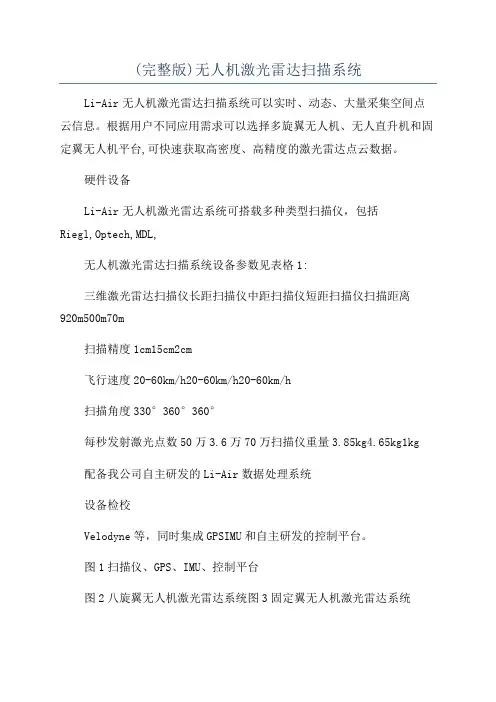
硬件设备Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl,Optech,MDL,无人机激光雷达扫描系统设备参数见表格1:三维激光雷达扫描仪长距扫描仪中距扫描仪短距扫描仪扫描距离920m500m70m扫描精度1cm15cm2cm飞行速度20-60km/h20-60km/h20-60km/h扫描角度330°360°360°每秒发射激光点数50万3.6万70万扫描仪重量3.85kg4.65kg1kg配备我公司自主研发的Li-Air数据处理系统设备检校Velodyne等,同时集成GPSIMU和自主研发的控制平台。
图1扫描仪、GPS、IMU、控制平台图2八旋翼无人机激光雷达系统图3固定翼无人机激光雷达系统公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。
图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右)图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。
成熟的飞控团队公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间图6无人机激光雷达系统以及影像系统完善的数据预处理软件公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。
图7Li-Air数据预处理功能成功案例2022年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。
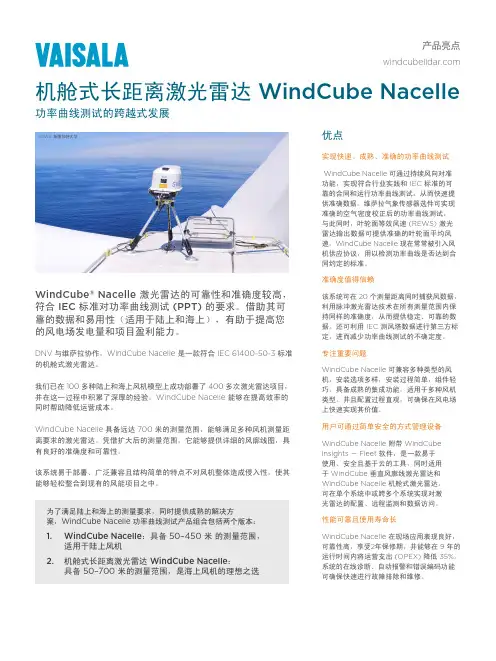
优点实现快速、成熟、准确的功率曲线测试WindCube Nacelle 可通过持续风向对准功能,实现符合行业实践和 IEC 标准的可靠的合同和运行功率曲线测试,从而快速提供准确数据。
维萨拉气象传感器选件可实现准确的空气密度校正后的功率曲线测试,与此同时,叶轮面等效风速 (REWS) 激光雷达输出数据可提供准确的叶轮面平均风速。
WindCube Nacelle 现在常常被引入风机供应协议,用以检测功率曲线是否达到合同约定的标准。
准确度值得信赖该系统可在 20 个测量距离同时捕获风数据,利用脉冲激光雷达技术在所有测量范围内保持同样的准确度,从而提供稳定、可靠的数据。
还可利用 IEC 测风塔数据进行第三方标定,进而减少功率曲线测试的不确定度。
专注重要问题WindCube Nacelle 可兼容多种类型的风机,安装选项多样,安装过程简单,组件轻巧,具备成熟的集成功能,适用于多种风机类型。
并且配置过程直观,可确保在风电场上快速实现其价值。
用户可通过简单安全的方式管理设备WindCube Nacelle 附带 WindCube Insights — Fleet 软件,是一款易于使用、安全且基于云的工具,同时适用于 WindCube 垂直风廓线激光雷达和 WindCube Nacelle 机舱式激光雷达, 可在单个系统中或跨多个系统实现对激 光雷达的配置、远程监测和数据访问。
性能可靠且使用寿命长WindCube Nacelle 在现场应用表现良好,可靠性高,享受2年保修期,并能够在 9 年的运行时间内将运营支出 (OPEX) 降低 35%。
系统的在线诊断、自动报警和错误编码功能可确保快速进行故障排除和维修。
WindCube ® Nacelle 激光雷达的可靠性和准确度较高,符合 IEC 标准对功率曲线测试 (PPT) 的要求。
借助其可靠的数据和易用性(适用于陆上和海上),有助于提高您的风电场发电量和项目盈利能力。
激光雷达核心参数激光雷达是一种通过激光束来测量周围环境的传感器,广泛应用于自动驾驶、机器人、无人机等领域。
激光雷达的核心参数对其性能和应用有着重要影响,本文将对激光雷达的核心参数进行详细介绍。
一、测距精度测距精度是衡量激光雷达性能的重要指标之一,通常表示为距离误差。
它受到多种因素的影响,包括激光功率、接收器灵敏度、噪声等。
在实际应用中,测距精度需要根据具体需求进行选择。
二、角分辨率角分辨率是指激光雷达可以探测到的最小角度。
它与激光束发射和接收系统的设计有关,通常越小越好。
角分辨率决定了激光雷达可以检测到多少个目标,并且对于高速移动目标的检测也非常重要。
三、扫描频率扫描频率是指每秒钟扫描次数,也称为帧率。
它直接影响了激光雷达的实时性能。
通常情况下,扫描频率越高,激光雷达可以检测到更多的目标,并且对于高速移动目标的检测也更加精确。
四、视场角视场角是指激光雷达可以覆盖的水平和垂直角度范围。
它决定了激光雷达可以检测到多少个目标,并且对于环境建模和路径规划也非常重要。
视场角通常由激光束发射和接收系统的设计决定。
五、工作距离工作距离是指激光雷达可以探测到目标的最远距离。
它受到多种因素的影响,包括激光功率、接收器灵敏度、大气衰减等。
在实际应用中,工作距离需要根据具体需求进行选择。
六、数据输出方式数据输出方式是指激光雷达输出数据的格式和接口类型。
常见的数据格式包括点云、图像等,常见的接口类型包括以太网、CAN总线等。
数据输出方式对于不同应用场景有着不同要求,因此需要根据具体需求进行选择。
七、价格价格是衡量激光雷达性价比的重要指标之一。
激光雷达的价格通常受到多种因素的影响,包括性能、品牌、市场需求等。
在实际应用中,需要根据具体需求和预算进行选择。
总结:综上所述,激光雷达的核心参数对其性能和应用有着重要影响。
测距精度、角分辨率、扫描频率、视场角、工作距离和数据输出方式是衡量激光雷达性能的关键指标,需要根据具体需求进行选择。
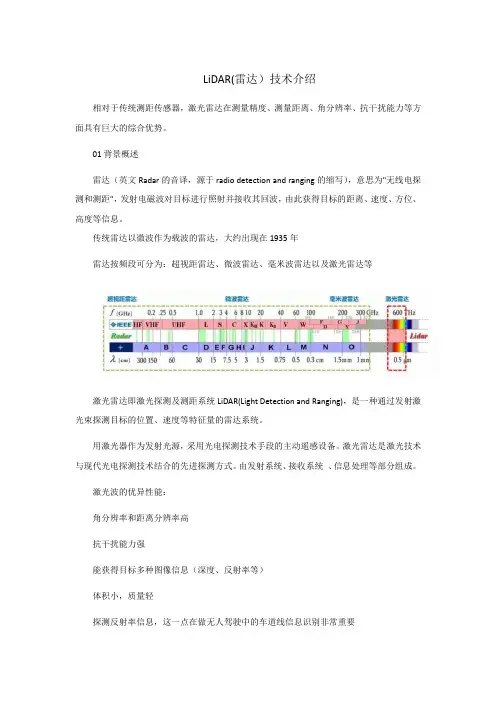
国产激光雷达性能参数 The manuscript was revised on the evening of 2021激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。
这是在 2004 年提出的定义,更符合激光雷达的概念。
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。
它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达在无人驾驶中的功能:第一是路沿检测,也包括车道线检测;第二是障碍物识别,对静态物体和动态物体的识别;第三是定位以及地图的创建。
一款好的激光雷达设备都有哪些评判标准呢?“单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。
激光雷达详细的参数如下:线束………… 16线波长………… 905nm激光等级………… class 1精度…………±2cm(典型值)测距………… 20cm~150m(目标反射率40%)出点数………… 320,000pts/s垂直测角………… 30°垂直角分辨率………… o水平测角………… 360o水平角分辨率………… o至o转速………… 300-1200rpm (5-20Hz)输入电压………… 9-32VDC产品功率………… 9w(典型值)防护安全级别………… IP67操作温度………… -10~60°C规格………… H:*φ:109mm重量………… (不包含数据线)采集数据…………三维空间坐标/反射率激光雷达生产复杂,价格高昂也是行业普遍面对的问题通过深圳在高端制造商的积累解决这个问题。
基于激光雷达技术的粉尘污染源监测吕阳;李正强;谢剑锋;张丰;刘小强;刘诏;谢一凇;许华;陈兴峰【摘要】针对粉尘污染点源数量多、夜间偷排偷放监测难等问题,环保监测迫切需要发展新一代遥感监测技术,为环境保护提供技术支撑.激光雷达具有远距离、全天时监测的优势,可实现对污染源的客观、全天时监测.为了验证激光雷达主动遥感技术监测粉尘污染源排放的可行性,在河北省组织了一次粉尘污染源的Lidar监测实验,在进行距离校正的基础上,发展了Lidar点源污染监测指数因子方法.结果表明:烟尘排放浓度与Lidar指数因子具有较好的一致性,校正决定系数可达0.94.在稳定排污的情况下研究Lidar指数因子的限值,结果显示,将指数因子的限值设为2.3时,与在线监测的一致性可以达到99%以上.%To address the large number of point pollution sources and shortage of night monitoring means,there is a pressing need to provide remote sensing monitoring technology supporting for environment protection.With the advantage of long range detection and the capability of working at all time,lidar can provide an objective,continuous and real-time monitoring for a point pollution source.An excess emission experiment was carried out in Hebei province to confirm the feasibility of lidar using in point pollution source monitoring.A lidar index factor method was submitted based on the distance correction.And result showed that there was a positive relationship between the dust emission concentration measured by on-line monitoring instrument and lidar index factor (r=0.94).Furthermore,with the threshold of 2.3,the detection accuracy up to 99% was achieved using lidar index factor under a stable pollution emission.【期刊名称】《中国环境监测》【年(卷),期】2018(034)002【总页数】7页(P130-136)【关键词】激光雷达;粉尘排放;点污染源【作者】吕阳;李正强;谢剑锋;张丰;刘小强;刘诏;谢一凇;许华;陈兴峰【作者单位】中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院大学,北京100049;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;河北省环境监测中心站,河北石家庄050000;河北省环境监测中心站,河北石家庄050000;河北省环境监测中心站,河北石家庄050000;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院大学,北京100049;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101;中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京100101【正文语种】中文【中图分类】X87随着经济快速发展,城市规模不断扩大,大气污染已经严重影响了人们的生产生活[1-2];虽然大部分排污企业已按要求安装了污染排放在线监测仪器来采集烟气流速、浓度及硫化物和氮化物等含量信息。
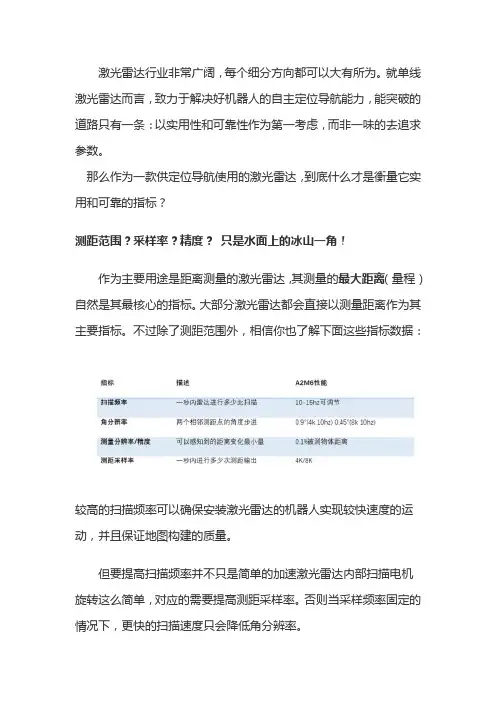
激光雷达行业非常广阔,每个细分方向都可以大有所为。
就单线激光雷达而言,致力于解决好机器人的自主定位导航能力,能突破的道路只有一条:以实用性和可靠性作为第一考虑,而非一味的去追求参数。
那么作为一款供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标?测距范围?采样率?精度?只是水面上的冰山一角!作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。
大部分激光雷达都会直接以测量距离作为其主要指标。
不过除了测距范围外,相信你也了解下面这些指标数据:较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。
但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。
否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
除了测距距离、扫描频率之外,测量分辨率和精度对于激光雷达性能来说同样重要,并且对于三角测距激光雷达而言,也更具有挑战。
由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。
因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。
同时为了可靠量产,也需要做很多的配套工作。
上面列举的这些性能指标都是大家所知道的,自然也是激光雷达厂家长久以来一直在不断追求和突破的。
不过,这个并不是说要盲目的追求这些指标的提高,而是要像前面所说,要更加看重整体产品的实用和可靠性,更好的参数不一定能带来更好的产品,可能还会带来其他方面的缺失。
所以现在,我们来聊聊你可能不熟悉的激光雷达的一面,也是在选择激光雷达产品时所需要注重考虑的因素。
水下的冰山-日光抗击能力和深色物体检出率除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在雷达实际使用中还有两个非常重要但往往不太被大家了解的性能指标:深色物体检出率环境光抗干扰能力在实际工作中,很多应用环境中的物体大多不是白色墙面,而是深色的,如家具,暗色的墙纸。
激光雷达技术
“雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜
索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散
射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框
图上也十分类似,见下图
激光雷达是工作在光频波段的雷达。
与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信
号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)
等信息,实现对目标的探测、跟踪和识别。
激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频。
车载激光雷达核心性能参数及分类标准近年来,(智能)汽车的发展极大地推动了激光雷达产业的热度,目前国内外在激光雷达领域布局的公司越来越多。
激光雷达是一种发射光束并接收回波获取目标三维信息的系统,已经有着几十年的应用历史。
激光雷达系统复杂,应用场景多样,多种技术路线并存,因此,对激光雷达性能的评价不是一个简单的问题,尤其是一些参数容易混淆,如探测精度、探测准确度、探测分辨率、帧频和点频等。
由于还没有统一的标准,不同厂家在宣传中选择的参数并不完全一样。
实际上,并非所有的参数都是激光雷达的核心参数,还有一些参数之间存在较强的关联性。
如果不能正确认识这些参数的含义、相互关系、决定因素,很可能被个别高性能指标所迷惑,而无法了解激光雷达的真实性能。
本文选择车载激光雷达的关键性能参数,对这些参数的定义、计算方法、相互关系、决定因素等进行了梳理和归纳,可以帮助用户更好地使用激光雷达,对激光雷达的设计也有指导意义。
车载激光雷达核心性能参数及分类对车载激光雷达的评价通常涉及到性能、可靠性以及应用等方面。
用户关心的参数很多,包括:激光波长、探测距离、视场角(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、防护等级、功率、(供电)电压、激光发射方式、使用寿命等。
但激光雷达功能上是一种距离测试系统,其核心性能应围绕测试的速度、测试的空间范围、测试分辨率、测试的准确度、测试的重复度几方面来评价。
依据这个原则,通常认为激光雷达的核心性能参数有帧频、最大探测距离和最小探测距离、视场角、距离分辨率、水平角分辨率、垂直角分辨率、点频以及测距精度和测距准确度。
根据现有激光测距仪相关标准查询,参数定义为:重复频率:每秒钟完成的测距次数。
测距范围:在规定大气条件下,对规定目标达到规定的测距准确度时,能探测到的最远/近距离。
水平视场角:在水平方向上最大方位扫描角度θx。
垂直视场角:在垂直方向上最大方位扫描角度θγ。
距离分辨率:在光束传播方向上能够区分两个目标之间的最小距离间隔。
激光雷达反射率数据预处理方法研究与应用激光雷达是一种通过激光束探测目标并获取其反射信号的传感器。
反射率是激光雷达获取的数据中的一个重要参数,可以描述目标对激光光线的反射能力。
激光雷达反射率数据预处理方法的研究与应用对于精确地分析和识别目标物体,比如建筑、植被和地形等,具有重要意义。
一、激光雷达反射率数据的预处理步骤激光雷达反射率数据的预处理步骤包括数据获取、去除噪声、校正和分割等。
首先,数据获取是指通过激光雷达对目标进行扫描和测量得到原始反射率数据。
其次,去除噪声是对原始数据中的干扰信号进行滤除,以提高数据质量。
常见的去噪方法包括均值滤波、中值滤波和高斯滤波等。
然后,校正是针对激光雷达的系统误差进行校正,以获得更准确和可靠的反射率数据。
最后,分割是将目标物体从背景中分离出来,以便后续的特征提取和目标识别。
二、激光雷达反射率数据预处理方法的研究1. 去噪方法去噪方法是激光雷达反射率数据预处理的重要环节。
常用的去噪方法包括均值滤波、中值滤波和高斯滤波等。
其中,均值滤波通过计算邻域内的像素平均值来平滑图像,有效减少噪声的影响。
中值滤波则通过计算邻域内像素的中值来滤除噪声,适用于激光雷达数据中存在较多的离群点的情况。
高斯滤波则利用权重函数对邻域内的像素进行加权平均,使得噪声得到更好的抑制。
2. 校正方法校正方法是对激光雷达反射率数据进行系统误差校正的关键环节。
常见的校正方法包括距离衰减校正和可视域校正。
距离衰减校正是利用激光束传播过程中的衰减规律,校正激光雷达反射率数据中的距离衰减效应,以获得更真实的反射率信息。
可视域校正则通过对目标物体与激光雷达之间的可视关系进行建模,校正激光雷达反射率数据中的遮挡和反射率失真等误差。
3. 分割方法分割方法是将目标物体从背景中分离出来的关键步骤,为后续的特征提取和目标识别提供基础。
常用的分割方法包括基于阈值的分割、区域生长分割和聚类分割等。
基于阈值的分割是根据反射率的阈值对目标和背景进行二值化分割。
激光雷达原理-------读书笔记99121-19 邓洪川一.概念:“雷达”(Radio Detection and Range,Radar)是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图微波雷达激光雷达激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频移大,可以探测从低速到高速的目标。
天线和系统的尺寸可以作得很小。
利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。
目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种:(1)按激光波段分,有紫外激光雷达、可见激光雷达和红外激光雷达。
(2)按激光介质分,有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。
(3)按激光发射波形分,有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
(4) 按显示方式分,有模拟或数字显示激光雷达和成像激光雷达。
(5) 按运载平台分,有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。
(6) 按功能分,有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像雷达,激光目标指示器和生物激光雷达等。
(7) 按用途分,有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。
激光雷达点云数据LiDAR(Light Detection and Ranging),是激光探测及测距系统的简称,另外也称Laser Radar或LADAR(Laser Detection and Ranging),由激光雷达进行扫描所获取的数据,即为激光雷达点云数据。
激光雷达是用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。
激光雷达是激光技术与现代光电探测技术结合的先进探测方式。
由发射系统、接收系统、信息处理等部分组成。
发射系统是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器、半导体激光器及波长可调谐的固体激光器以及光学扩束单元等组成;接收系统采用望远镜和各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等组合。
激光雷达采用脉冲或连续波2种工作方式,探测方法按照探测的原理不同可以分为米散射、瑞利散射、拉曼散射、布里渊散射、荧光、多普勒等激光雷达。
激光雷达的特点:与普通微波雷达相比,激光雷达由于使用的是激光束,工作频率较微波高了许多,因此带来了很多特点,主要有:(1)分辨率高激光雷达可以获得极高的角度、距离和速度分辨率。
通常角分辨率不低于0.1mard也就是说可以分辨3km距离上相距0.3m的两个目标(这是微波雷达无论如何也办不到的),并可同时跟踪多个目标;距离分辨率可达0.lm;速度分辨率能达到10m/s以内。
距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。
分辨率高,是激光雷达的最显著的优点,其多数应用都是基于此。
(2)隐蔽性好、抗有源干扰能力强激光直线传播、方向性好、光束非常窄,只有在其传播路径上才能接收到,因此敌方截获非常困难,且激光雷达的发射系统(发射望远镜)口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率极低;另外,与微波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,适于工作在日益复杂和激烈的信息战环境中。
激光雷达组成 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】激光雷达组成:发射、接收和信号处理三个主要部分组成。
1.激光发射器组成:工作物质、谐振腔和激励源A.特点:脉冲能量大、脉冲重复频率高质量好,特别是发散度要小、指向性要好体积、功耗小,性能稳定可靠B.分类:固体、气体、液体和半导体工作原理:Nd:YAG棒是在钇铝石榴石(YAG)中掺入激光物质(Nd3+,钕离子),在闪光灯发光的激励下,可造成棒中Nd3+离子的L1和L2能级间的粒子数反转,在光学谐振腔的作用下,形成粒子反转能级间的受激发射,从腔镜之一(M2)输出激光能量,其波长为μm,处于近红外波段。
由于Nd3+离子的四能级激光产生机制,使其粒子数反转的效率高、激光阈值低,因此Nd:YAG激光器可工作于连续波状态,也可工作于脉冲状态,激光雷达多使用后者。
对于脉冲工作的Nd:YAG激光器,其激励闪光灯也需工作在脉冲状态。
由于闪光灯激励光脉冲的宽度较宽,使相应的光脉冲的宽度也较宽(微秒以上),称之为长脉冲激光。
这种长脉冲激光不符合激光雷达高峰值输出功率和高空间分辨率的要求,因此需要采用图中的Q开关来压窄其脉冲宽度。
Q开关技术又称为调Q技术,是产生纳秒(ns)级窄脉冲激光常用的技术(另一种常用于产生ps级窄激光脉冲的技术是锁模技术)。
如图所示,Q开关由一块光电晶体和偏振片组成。
其工作原理如下:平时,Q开关处于对激光不透明的状态,在激光腔中形成一个大的损耗,相当于开关关闭,激光腔的Q值很低,激光振荡不能形成;当闪光灯脉冲将Nd:YAG中的Nd3+离子激发到处于最佳粒子数反转状态时,突然将Q 开关打开,使其损耗变低,激光腔的Q值突然增高,从而形成一个极窄的激光脉冲输出。
Q开关对激光腔Q值的调节通常利用晶体的电光特性来实现。
通过在电光晶体上突然改变外加电压的方法,可使Q开关从最大损耗状态变为最小损耗状态。