东元刹车器
- 格式:pdf
- 大小:230.30 KB
- 文档页数:2


continetal mk120刹车系统工作参数-回复Continental MK120 刹车系统是一种先进的电子控制刹车系统,广泛应用于现代汽车中。
本文将详细介绍关于Continental MK120 刹车系统的工作参数。
我们将逐步回答关于该刹车系统的各种问题,包括如何工作、主要组成部分以及系统的性能参数。
首先,我们来讨论Continental MK120 刹车系统是如何工作的。
该系统基于电子控制单位(ECU)和刹车主缸传感器。
ECU负责监控车辆的刹车操作以及各个组件的工作情况。
它通过刹车主缸传感器接收来自驾驶员的刹车输入信号,并根据这些信号来控制刹车系统的效能。
此外,MK120 刹车系统还配备了防抱死刹车系统(ABS)和电子制动力分配(EBD)功能,以提供更高的刹车控制性能。
接下来,让我们看看Continental MK120 刹车系统的主要组成部分。
该系统由各种传感器、执行器和控制单元组成。
传感器包括刹车主缸传感器、车轮速度传感器、刹车踏板传感器等。
这些传感器负责检测车辆的刹车状态、车轮速度以及驾驶员的刹车输入。
执行器包括刹车助力器、刹车泵以及刹车阀。
它们负责根据ECU的控制信号来执行刹车操作。
控制单元是系统的核心,它根据传感器的输入信号和预设的算法来控制刹车系统的工作。
在紧急刹车情况下,MK120 刹车系统还可以通过电子控制单元来激活紧急制动功能,以确保车辆的安全。
然后,我们将重点关注Continental MK120 刹车系统的一些重要性能参数。
首先是制动力。
MK120 刹车系统可以根据驾驶员的刹车输入信号来提供恒定的制动力。
该系统能够根据车辆的负载、速度以及路面状况等因素进行动态调整,以确保车辆能够及时停下来。
其次是制动距离。
MK120系统通过控制刹车泵和刹车阀的工作来实现快速制动,从而减小制动距离。
鉴于紧急刹车时的潜在危险,MK120 系统的快速制动能力在确保驾驶员和乘客安全方面至关重要。



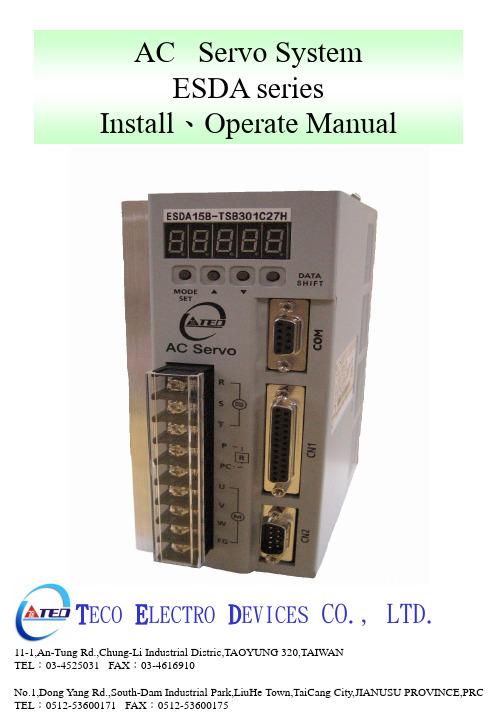
TSDA系列东元数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. TSDA伺服连接示意图 2. 通电前的检查 3. 通电时的检查 4. TSDA伺服驱动器的参数设定方法 5. TSDA伺服驱动器的参数表 6. TSDA伺服驱动器的参数和性能优化调整 1. TSDA伺服连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在保修范围!) 2. 通电前的检查 1) 确认TSDA伺服驱动器和电机插头的连接,相序是否正确: A.MB中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C FG接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.MB中惯量电机,带刹车制动器电机的连接: 伺服驱动器 电机插头 U B V I W F FG接地 E +24V刹车电源 A 刹车电源 C 2)确认伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4. TSDA伺服驱动器的参数设定方法 1) 按面板“MODE”键,选择显示到参数设定模式。
2) 用 ▲键和 ▼键,选择参数编号值增大或减小。
或用“DATA SET”键,移位。
3) 选择参数编号为想修改的参数号后,按住“DATA SET”键(一秒以上),显示出该参数号的参数值。
4) 用第2)步的方法,修改参数值。
5) 修改参数值完毕,按住“DATA SET”键(一秒以上),显示返回到参数号显示。
注:当参数值,最左边显示“H”时,表示参数为16进制。

北京天正恒业电器有限公司220V:0.75~1.5KW 380V:0.75~3.7KW 北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310机种说明•E31 0 -2 01 -H 应用0 标准版1 客制化12 客制化23 客制化3电源电压2 220V 4 380V 马力数P5 0.5马力01 1马力02 2马力03 3马力05 5马力外形代号H 标准版电源种类3 三相机种无单/三相共用机种北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310变频器规格•5中类型可选(输出频率、频率设定、输出电压、直流电压、输出电流)多机能模拟输出•1点AVI,0~10VDC/2~10VDC 可选•1点ACI ,0~20mA/4~20mA 可选多机能模拟输入2段加减速时间(0.1~3600.0秒)及4段S 曲线加/减速控制18条固定曲线、1种任意曲线V/F 模式1~12KHz (根据温升定)载波频率一般控制频率上/下限,三段跳跃频率可个别设定频率限制功能•外接可变电阻(0~10V/0~20mA 等)•端子台多机能入力做Up/down 设定•段速控制•自动程序运转功能外部信号设定方式五位数LED 及状态指示灯显示可显示频率/线速度/直流电压/输出电压/电流/变频器转向/变频器参数/故障纪录/程序版本/散热片温度/PID 反馈等显示功能可直接以▲▼设定或利用键盘上的电位器旋钮设定键盘设定方式数位式: 0.01Hz,模拟式:0.06Hz/60Hz(10 bits)速度分辨率±0.5%(矢量模式)速度控制精度1:100(矢量模式)速度控制范围150%/1Hz (矢量模式)启动转矩0.01~400.00Hz 频率范围频率控制V/F 或矢量控制控制方式北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310变频器规格电子线路保护接地故障散热片过热保护、过转矩侦测、故障接点控制、反转限制、开机后直接启动及故障复归的限制、参数锁定其他功能200V 级:直流电压<190V ; 380V 级:直流电压< 380V 不足电压•瞬停后可以速度追踪方式再启动瞬间停电再启动200V 级:直流电压>410V ; 380V 级:直流电压> 820V 过电压•加速/减速/运转中失速防止功能失速防止继电器输出*1点标准内建; 开集电极输出*1点标准内建数字输出信号电子线路保护输出端短路•电子继电器保护马达•变频器本体150%/1min 跳脱保护过载保护保护功能IP20保护等级0-95%相对湿度(不结露) / 1G(9.8m/s 2)湿度/耐震动-10~50℃运转温度/保存温度约20%,内含制动晶体管加制动电阻后可达100%以上煞车转矩•RS485控制、可作1对1或1对多控制、可设定波特率/停止位/校验位/数据位通信控制瞬停再启动、速度搜寻、过负载检出、8段速、加减速切替(2段)、S 曲线加减速、2/3线制控制、PID 控制、转矩补偿、滑差补偿、频率上/下限、自动节能运行、通信控制(Modbus 从站连接与PC 连接)、异常复归其它功能6点标准内建数字输入信号一般控制北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310产品特色(性能方面)•16Bit 高性能MCU •电压矢量控制1:等级同(台达M/汇川MD300/SV300..)2: 低频启动转矩150%/1.0Hz…(最大180% 3S)3: 控制范围1:100 (0.5/50;0.6/60)Hz 4: 稳速精度:±0.5% (±7.5/1500;±9/1800)RPM •VF 自定义曲线多点设定灵活运用•高频平顺运转400Hz •高精度稳态运转设计•3种不同软调变技术•PID 控制设计1:内附睡眠/舒醒模式,适用PUMP 等应用2:反馈监控显示人性化,供设定范围与小数点等北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310产品特色(功能方面)•6个隔离式数值输入/2个线性式模拟输入•0.5Hp(0.4KW)~5Hp (3.7KW)内建煞车回路•内建RS485一组1:标准话线接口RJ112:RJ11线材市场标品,非客制品•内建操作面板可直接外拉(支持热插拔)1:面板与主机接口使用标准网线接口RJ452:RJ45线材市场标品,非客制品3:接线长度最大3M (5M 线材需附高质量屏蔽线)4:面板与S310/N310均可共用5:面板托盖可选购(配置与安装用)北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310产品特色(保护方面)•变频器输出电流限制保护(硬件)1:IPM 智能型模块自动过电流切断保护2:IGBT 限电流切断保护外部线路•温控保护1:散热座过热OH 保护(运转环境温度-10~50度)2:电流电驿保护OL2(150%/1分钟)3:高温自动降载波功能(有效降低夏季高温故障)•雷击保护1:内置突波吸收器(电源输入端)北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310系列集中一览表型号 输入电压 额定电流(A ) 额定功率(KW )尺寸(mm) W*H*D E310-2P5 3.1 0.4 E310-201 4.5 0.75 E310-202 1/3 PH 200~240V 7.5 1.5 96x 162 x 149 .9 E310-401 2.3 0.75 E310-402 3.8 1.5 96x 162 x 149 .9 E310-403 5.2 2.2 E310-405 3 PH 380~480V 8.8 3.7 138 x 184 x 162北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司参数一览表自动程序运转参数组13-用户使用参数组12-面板显示组11-辅助功能组10-PID 功能组09-通讯功能组08-保护功能组07-电机参数组06-V/F 控制组05-起动停止控制组04-多段速功能参数群组03-外部端子模拟功能组02-外部端子数值功能组01-基本功能00-说明参数群组北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310 接线图北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司•端子S1~S6供多功能端子输入功能使用清除计数器21主/副运转信号切换10计数器触发信号输入20遮断停止09自动程序运转19紧急停止08电源电压侦测电能回升功能18加/减速时间207故障复归(Reset )17点动反转指令06PID 积分器复归16点动正转指令05PID 功能禁止15多段速设定位元204主/副频率切换14多段速设定位元103Down 减频率指令13多段速设定位元002Up 增频率指令12反转/停止01加/减速禁止11正转/停止00北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司制动电阻1278-1503003.754051288-2502002.2340311910-4001501.524021258-750600.75140111910-1001501.522021198-200600.7512012188-200600.3750.52P5并联个数Ω(W )制动转矩(%)制动电阻ED (%)制动电阻规格适用电机容量(KW )适用马力数(HP )变频器机种北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310与汇川MD300和台达M 比较(一)型号机种<<输出频率>=控制模式==输出转矩<=keypad>=PID控制>=通讯功能>=段速控制>>顺序控制>>内置PLC==无无无8段速+点动速度4段速7段+点动速度8段速,可单独设定每段运行时间和转向无7段速可设定方向内置PID控制无内置PID控制内建RS-485无内建RS-485150%/1Hz150%/0.5Hz 150%/1Hz面板可外拉,有电位器无内建VR 面板可外拉,有电位器0.1~400.00Hz0.1-300Hz0.1~400.0HzV/F、矢量控制V/F控制、矢量控制V/F控制、矢量控制E310汇川MD300台达VFD-M220V:0.4~1.5KW380V:0.75~3.7KW 220v 0.4~2.2kw 380v 0.75-90kw 220v 0.4-5.5kw 380v 0.75-7.5kw 北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310与汇川MD300和台达M 比较(二)型号散热方式>>刹车功能==输入输出端子<=过载能力==载波频率<<内置制动晶体管E310汇川MD300台达VFD-M内置制动晶体管全系列强制风冷风扇内置制动晶体管 散热片散热,风扇散热6DI,NPN/PNP切换2DO 1继电器/1晶体管2AI/1AO150%/1min 1-15KHz150%/1min 0.5-16KHz150%/1min 1~12KHz6DI 单相输入1DO和1路继电器输出2AI/1AO5 DI NPN 单向2 DO(1高速/1高耐流)2 AI/1 AO 可扩展 3 DI/DO 北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310目标市场:风机、水泵—温室、冷藏室,小型风机、恒压供水设备 输送设备—传送机、输送带、送料机… 车床—磨床、钻床、锯床、铣床…纺织机械—漂/染色机械、检布机、定型机、印花机… 塑胶/橡胶处理机—破碎机、制袋机、织袋机… 印刷设备—胶印机包装机械—充填/封口机、灌装机 木工机械—封边机、砂光机 针织机械—大圆机北京天正恒业电器有限公司公司网址:W W W .a p e p o .c o m北京天正恒业电器有限公司E310应用在封边机1.概要是木工机械中的一种,能完成直面式异形封边中的输送—涂胶—切断—前后齐头—上下修边—上下精修边—上下刮边—抛光等诸多工序,变频器拖动高速电机对封好的边缘进行修边。

0.82In0.76In +60℃+55℃0.87In0.84In 0.91In0.89In 0.96In0.95In 1.0In+50℃+45℃1.0In TBX-125L/M/H +40℃断路器型号环境系数降容系数4、热动脱扣器额定工作电流随环境温度变化的降容系数热磁式断路器使用说明书感谢您选用东元牌热磁式断路器,在此请详细阅读说明书。
1、适用范围及正常工作环境1.1 热磁式断路器(以下简称断路器),额定绝缘电压为1000V ,适用于交流50Hz ,额定工作电压690V 及以下,额定工作电流至800A 的电路中 作不频繁转换及电动机不频繁起动之用。
断路器具有过载、短路保护功能,能保护线路和电源设备不受损坏。
1.2 正常工作环境1.2.1 安装地点的海拔不超过2000m;1.2.2 周围空气温度为-5℃~+40℃,且24h 平均值不超过+35℃;1.2.3 安装地点的相对空气湿度在最高温度为+40℃时,空气的相对湿度不超过50%,在较低温度下可以有较高的相对湿度,最湿月的月平均 温度不超过+25℃,该月的月平均最大相对湿度不超过90%,并考虑因温度变化发生在产品表面的凝雾; 1.2.4 污染等级为3级;1.2.5 断路器主电路的安装类别为III ,其余辅助电路、控制电路安装类别为II 。
2、安装方式本系列断路器一般为垂直安装,也可以水平安装。
垂直安装电源侧负载侧负载侧电源侧水平安装3、连接导线的截面积和相适应的额定电流2.5导线截面积(mm )16/20额定电流(A)225432640/50106316802510035125/1405016070180/200/225952501206、断路器安全距离7、断路器内部附件安装位置8、正确使用与维护8.1 有关配线断路器配线必须符合上进下出,即1、3、5端子接电源线,2、4、6端子接负载线,不允许倒进线。
8.2 有关操作8.2.1 断路器手柄可以处于三个位置,分别表示合闸、断开、脱扣三种状态,当手柄处于脱扣位置时,应向后扳动手柄,使断路器再扣,然后合闸。

■ 警告及注意事項:■ 安全注意事項:在安裝、運轉、保養、點檢前,請詳閱本說明書。
另外,唯有具備專業資格的人員才可進行裝配線工作。
說明書中安全注意事項區分為「警告」與「注意」兩項。
:表示可能的危險情況,如忽略會造成人員死亡或重大損傷。
:表示可能的危險情況,如未排除會造成人員較小或輕微的損傷及機器設備的損壞。
所以應詳閱本技術手冊再使用此伺服驅動器。
首先,感謝您採用東元電機伺服驅動器JSDE系列(以下簡稱JSDE)和伺服馬達。
JSDE可由數位面板操作器或透過PC人機程式來操作,提供多樣化的機能,使產品更能符合客戶各種不同的應用需求。
在使用JSDE前,請先閱讀本技術手冊,本說明書主要內容包括:y伺服系統的檢查、安裝及配線步驟。
y數位面板操作器的操作步驟、狀態顯示、異常警報及處理對策說明。
y伺服系統控制機能、試運轉及調整步驟。
y伺服驅動器所有參數一覽說明。
y標準機種的額定規格。
為了方便作日常的檢查、維護及瞭解異常發生之原因及處理對策,請妥善保管本說明書在安全的地點,以便隨時參閱。
註:請將此說明書交給最終之使用者,以使伺服驅動器發揮最大效用。
目錄第一章產品檢查及安裝1-1 產品檢查............................................................................................................................1-1 1-1-1 伺服驅動器機種確認.................................................................................................1-1 1-1-2 伺服馬達機種確認.....................................................................................................1-2 1-1-3 伺服驅動器與伺服馬達搭配對照表.........................................................................1-2 1-2 伺服驅動器外觀及面板說明............................................................................................1-4 1-3 伺服驅動器操作模式簡介................................................................................................1-5 1-4 伺服驅動器安裝環境條件與方法....................................................................................1-6 1-4-1 安裝環境條件.............................................................................................................1-6 1-4-2 安裝方向及間隔.........................................................................................................1-6 1-5 伺服馬達安裝環境條件與方法........................................................................................1-7 1-5-1 安裝環境條件.............................................................................................................1-7 1-5-2 安裝方式.....................................................................................................................1-7 1-5-3 其他注意事項.............................................................................................................1-8第二章配線準備2-1 系統組成及配線................................................................................................................2-1 2-1-1 伺服驅動器電源及週邊裝置配線圖.........................................................................2-1 2-1-2 伺服驅動器配線說明.................................................................................................2-2 2-1-3 電線規格.....................................................................................................................2-3 2-1-4 馬達端出線.................................................................................................................2-4 2-1-5 馬達及電源標準接線圖.............................................................................................2-6 2-1-6 TB端子說明..............................................................................................................2-7 2-1-7 馬達附機械式剎車(BRAKE)接線說明....................................................................2-7 2-2 I/O信號端子說明...............................................................................................................2-8 2-2-1 CN1控制信號端子說明............................................................................................2-9 2-2-2 CN2編碼器信號端子說明......................................................................................2-202-2-3 CN3/CN4 通訊信號端子說明................................................................................2-22 2-3 控制信號標準接線圖......................................................................................................2-23 2-3-1 位置控制(Pe Mode)接線圖(Line Driver)................................................................2-23 2-3-2 位置控制(Pe Mode)接線圖(Open Collector)..........................................................2-24 2-3-3 位置控制(Pi Mode)接線圖......................................................................................2-25 2-3-4 速度控制(S Mode)接線圖.......................................................................................2-26 2-3-5 轉矩控制(T Mode)接線圖.......................................................................................2-27第三章面板及試運轉操作說明3-1面板操作說明.....................................................................................................................3-1 3-2 面板顯示訊息說明............................................................................................................3-8 3-2-1 狀態顯示功能說明.....................................................................................................3-8 3-2-2 診斷功能說明.............................................................................................................3-9第四章試運轉操作說明4-1 無負載伺服馬達試運轉....................................................................................................4-2 4-2 無負載伺服馬達搭配上位控制器試運轉........................................................................4-5 4-3連接負載伺服馬達搭配上位控制器試運轉.....................................................................4-8第五章控制機能5-1 控制模式選擇....................................................................................................................5-1 5-2 轉矩模式............................................................................................................................5-2 5-2-1 類比轉矩命令比例器.................................................................................................5-2 5-2-2 類比轉矩命令偏移調整.............................................................................................5-3 5-2-3 轉矩命令直線加減速.................................................................................................5-4 5-2-4 轉矩輸出方向定義.....................................................................................................5-5 5-2-5 內部轉矩限制設定.....................................................................................................5-6 5-2-6 轉矩模式的速度限制.................................................................................................5-6 5-2-7 其他轉矩控制機能.....................................................................................................5-85-3-1 選擇速度命令...........................................................................................................5-10 5-3-2 類比速度命令比例器...............................................................................................5-11 5-3-3 類比速度命令偏移調整...........................................................................................5-11 5-3-4 類比速度命令限制...................................................................................................5-12 5-3-5 編碼器信號分周輸出...............................................................................................5-12 5-3-6 速度命令平滑化.......................................................................................................5-14 5-3-7 速度旋轉方向定義...................................................................................................5-17 5-3-8 速度迴路增益...........................................................................................................5-18 5-3-9 共振抑制濾波器(Notch Filter).................................................................................5-19 5-3-10 速度模式的轉矩限制............................................................................................5-21 5-3-11 增益切換機能........................................................................................................5-22 5-3-12 其他速度控制機能................................................................................................5-29 5-4 位置模式..........................................................................................................................5-32 5-4-1 外部脈波命令模式...................................................................................................5-33 5-4-2 內部位置命令模式...................................................................................................5-35 5-4-3 電子齒輪比...............................................................................................................5-40 5-4-4 位置命令一次平滑加減速.......................................................................................5-45 5-4-5 位置命令方向定義...................................................................................................5-46 5-4-6 位置迴路增益調整...................................................................................................5-46 5-4-7 脈波誤差量清除.......................................................................................................5-47 5-4-8 原點復歸...................................................................................................................5-48 5-4-9 其他位置控制機能...................................................................................................5-56 5-5 伺服增益調整..................................................................................................................5-57 5-5-1 自動增益調整...........................................................................................................5-61 5-5-2 手動增益調整...........................................................................................................5-64 5-5-3 改善響應特性...........................................................................................................5-65 5-6 其他機能..........................................................................................................................5-66 5-6-1 輸入/輸出接點機能規劃.........................................................................................5-665-6-3 接點輔助機能...........................................................................................................5-68 5-6-4 剎車模式...................................................................................................................5-69 5-6-5 機械剎車時序...........................................................................................................5-69 5-6-6 CW/CCW驅動禁止方式.........................................................................................5-71 5-6-7 外部回生電阻的選用...............................................................................................5-71 5-6-8 風扇運轉設定...........................................................................................................5-74 5-6-9 參數重置...................................................................................................................5-74第六章參數機能6-1 參數群組說明...................................................................................................................6-1 6-2 參數機能表.......................................................................................................................6-1第七章通訊機能7-1 通訊機能(RS-232 & RS-485).......................................................................................7-1 7-1-1 通訊接線.....................................................................................................................7-1 7-1-2 RS-232、RS-485通訊相關參數...............................................................................7-3 7-1-3 RS-232通訊協定及格式...........................................................................................7-5 7-1-4 RS-485通訊協定及格式...........................................................................................7-8 7-2 各參數相對應之通訊位址..............................................................................................7-19第八章異常警報排除8-1異常警報說明.....................................................................................................................8-1 8-2異常排除對策.....................................................................................................................8-3第九章綜合規格9-1 伺服驅動器詳細規格與尺寸型式....................................................................................9-1 9-2 伺服馬達詳細規格與尺寸型式........................................................................................9-6 附錄A 馬達附件................................................................................................................A-1。

东元速比控制器说明书东元速比控制器说明书一、产品概述东元速比控制器是一款高性能、高可靠性的电机控制器,主要用于驱动直流电机。
该控制器采用先进的PWM调速技术,具有良好的负载适应性和稳定性,可广泛应用于各种工业自动化领域。
二、产品特点1. 采用先进的PWM调速技术,具有高效率和低噪音;2. 具有多种保护功能,如过流、过压、欠压等保护;3. 采用模块化设计,易于维修和更换;4. 适用于各种直流电机控制;5. 可通过外部信号进行启停和调速。
三、技术参数参数名称参数值输入电压AC220V±10%输出电压DC0-220V输出功率1KW-50KW控制方式PWM调速工作温度-10℃~50℃存储温度-40℃~70℃湿度要求20%~90%RH四、安装与使用注意事项1. 安装前请检查产品是否完好无损;2. 安装时,请确保设备接地可靠;3. 接线时,请务必按照接线图正确连接;4. 使用前请检查控制器是否设置正确;5. 控制器应使用在规定的环境温度和湿度范围内;6. 请勿将控制器暴露在阳光直射下或潮湿的环境中。
五、故障排除1. 控制器无法启动可能原因:电源故障、接线错误、控制器故障。
解决方法:检查电源是否正常,检查接线是否正确,如仍不能启动,请联系售后服务。
2. 控制器输出不稳定可能原因:负载过大、控制器故障。
解决方法:减小负载,如仍然不稳定,请联系售后服务。
3. 控制器保护功能触发可能原因:过流、过压、欠压等保护功能触发。
解决方法:检查保护触发原因,解决问题后重新启动。
六、维护与保养1. 定期清洁设备表面和内部;2. 定期检查设备运行状态,如有异常及时处理;3. 定期更换易损件。
七、售后服务1. 产品质保期为一年,自购买之日起计算;2. 如需维修或更换配件,请联系售后服务。
八、注意事项1. 本说明书适用于东元速比控制器;2. 本说明书内容仅供参考,如有变更请以实物为准;3. 本产品属于高压电器,使用时请务必注意安全。



台湾TECO东元高效电机,东元高效马达:·高效率~提升能源使用效率,比原标准系列损失降低10%~30%,运转越久,节省的电费越多。
·低振动~精密加工及动平衡,振动等级达NEMA MG11998Part7、IEC34-14之N级以上,振动低。
·低噪音~高效率损失少→采用较小之外扇,较低之磁通密度设计,精密级加工及动平衡等,噪音均降低。
·本三相马达之设计符合国际上重要性能及品管规范,为低噪音、长寿命之电动机,具工商业上之经济实用价值。
·产品尺寸、特性依据IEC、JIS、CNS、NEMA等规格之要求,以有限元素分析法打造坚实结构设计,低振动、低噪音,全系列采用NON-SPARKING外扇。
·F级绝缘,B级温升,使用系数1.0以上,绝缘系统经UL审核认可,满载温升低,绝缘寿命长。
·保护方式IP54,防尘埃、防水溅,符合国际标准,安全更具保障性。
·符合安全规范EN294之新风罩设计,销欧洲需CE mark时,可直接适用。
·订购时可接洽选用符合美加能源法案(EPACT)效率水准之机种,适用美国能源部(DOE)授证CCOO2A,为全球第二家通过厂商。
·风罩新型设计荣获国家专利(新型第131186号),具有造型美观、降低噪音、增加风量与增强安全性之优越功能。
·F#80、100及132~250具坐卧两用互换性,L、F托架独立组装,改造拆装容易。
·高效率马达群组系列化,产品齐全符合各国际法规,具跨市场之泛用性。
·详检实验室获得美国商务部(DOC)NVLAP认证为亚洲第一家,精密度高,品质信赖性佳。
东元高效电机产品系列:AEHM/AEUM(JIS/CNS系列)产品规格:·额定输出1/4~215HP;0.6~160kw·极数(P)2、4、6·电压(v)200~460·频率(Hz)50、60·机座号(F#)63~315M·防护等级IP54东元高效电机产品系列:AEHJ/AEHU(BS系列)产品规格:·额定输出1~250HP;0.75~185kw·极数(P)2、4、6·电压(v)200~460·频率(Hz)50、60·机座号(F#)80~315M·防护等级IP54·冷却方式IC411东元高效电机产品系列:AEHE(NEMA系列)产品规格:·额定输出200~800HP·极数(P)2、4、6、8·电压(v)460~575·频率(Hz)60·机座号(F#)5007~6808·防护等级IP54·冷却方式IC411东元高效电机产品系列:AEJE(IEC/BS系列)产品规格:·额定输出150~950HP;110~710kw·极数(P)2、4、6、8·电压(v)200~440·频率(Hz)50、60·机座号(F#)315A~450A·防护等级IP54·冷却方式IC411东元高效电机产品系列:AEHG(NEMA系列)产品规格:·额定输出150~900HP·极数(P)2、4、6、8·电压(v)2300~4160·频率(Hz)60·机座号(F#)5007~6808·防护等级IP54·冷却方式IC411东元高效电机产品系列:AEJH(IEC/BS系列)产品规格:·额定输出125~2000HP;90~1500kw·极数(P)2、4、6、8·电压(v)3000~6600·频率(Hz)50、60·机座号(F#)315A~560C·防护等级IP54·冷却方式IC411台湾TECO东元铝壳电机,东元铝壳马达:•F级绝缘;•多元安装、轻巧实用;•框架使用高级铝挤型合金;•托架使用压铸铝合金;•轴承座内镶钢圈;•接线箱对称可4个90度转向,并且包括6个端子接线座;东元铝壳电机产品系列:AEAL/AEAU系列(卧式/立式)东元铝壳电机产品规格:•额定输出0.16~10HP•极数(P)2、4、6、8•电压(v)220~575•频率(Hz)50、60•机座号(F#)63~132M•防护等级IP55•冷却方式IC411东元铝壳电机产品系列:AEAH/AEAJ高效率系列(卧式/立式)东元铝壳电机产品规格:•额定输出1/4~10HP•极数(P)2、4、6•电压(v)220~440•频率(Hz)60•机座号(F#)63~132M•防护等级IP55•冷却方式IC411东元铝壳电机相对铸铁电机的优点:中心高比较高的电机没有铝壳是因为考虑到铝的机械强度不够。

通电刹车马达用途:为结构简单、安装方便、动作灵敏、无空载力矩、噪声低等特点,可用于各类机械转动系统中,起离合、寸动、变速、换向等作用。
使用条件:使用电压为直流24V,电压波动不超过额定电压的正负5%;摩擦表面不得沾染油污及杂物;安装时应轴向定位,如分轴安装应保持同轴度不大于0.1mm;安装时调整气隙至规定值。
除标准产品外,我公司可按客户要求设计、制造非标产品。
1、刹车马达,提供当电源切断后,可手动释放刹车,转动马达出力。
2、刹车来今片是由高摩擦系数和长寿命的材料制成,刹车次数可达1,00,000次后调整一次,可耐较高的温升、当温度在75℃时仍能全负载使用。
3、刹车马达使用AC电源,经由整流器转换后供应给DC刹车线圈使用其特性是噪音低、冲击小。
正反转均能有效地达到刹车动作。
4、刹车部分零部件充足,不影响售后服务问题东元刹车电机采用直流刹车,低噪声,配合结线变化可适用多种电源.特殊内部结构,刹车制动力高,马达刹车灵活,对于紧急停止及起动停止频繁的耐力特强,防止机械逆转及惯性大的重负载在短时间内停止,性能优越.马力HP:0.37KW-7.5KW ;电压V:三相3-phase 220V/380V特长:刹车器结构简单:零件少,信赖性高,气隙调整容易,保养方便;体积小,重理轻,安装容易:马达与刹车连为一体,小空间即可安装;刹车噪音低:采用D.C.刹车,无电滋声,刹车噪音极低;适应多种电压:刹车器电源由马达抽头供应,可依不同接线方式,取;出适当电压(A.C 200V-240V),经整流器整流为直流电压[D.C.80V-100V);刹车频率高:刹车来令片使用高级非石棉材质,可耐较高频率使用,磨耗率低,且无公害主要产品如下:1/4HP.1/2HP.1HP.2HP.3HP.5HP.71/2HP.10HP。

如何认识东元伺服电机型号东元伺服型号分类:经济型JSDEP系列驱动器通用型JSDAP系列驱动器JSDAP带刹车系列驱动器经济型JSDEP系列:JSMA-TC02ABK/JSDEP-15A, 200wJSMA-SC04ABK01/JSDEP-20A, 400wJSMA-LC08ABK01/JSDEP-20A, 750w 16轴JSMA-TC08ABK02/JSDEP-30A, 750w 19轴JSMA-MB10ABK01/JSDEP-30A, 1kw 2000转JSMA-MA10ABK01/JSDEP-30A, 1kw 1000转JSMA-MB15ABK01/JSDEP-50A3, 1.5kw通用型JSDAP系列JSMA-SC04ABK01/JSDAP-20A 400wJSMA-LC08ABK01/JSDAP-20A, 750w 16轴JSMA-TC08ABK02/JSDAP-30A, 750w 19轴JSMA-MB10ABK01/JSDAP-30A, 1kw 2000转JSMA-MA10ABK01/JSDAP-30A, 1kw 1000转JSMA—MB15ABK01/JSDAP-50A3, 1.5kwJSMA—MB20ABK01/JSDAP-50A3, 2kwJSMA—MB30ABK01/JSDAP-75A3, 3kwJSMA-MH44ABK01/JSDAP-100A3, 4.4kwJSMA-MH45ABK01/JSDAP-100A3, 4.5kwJSMA-MH55ABK01/JSDAP-150A3, 5.5kwJSMA-MH56ABK01/JSDAP-150A3, 5.6kwJSMA-MH75ABK01/JSDAP-200A3, 7.5kwJSMA-MH110ABK01/JSDAP-300A3, 11kwJSDAP带刹车系列JSMA-SC04ABKB/JSDAP-20A 400wJSMA-LC08ABKB/JSDAP-20A 750w 16轴JSMA-MB10ABKB/JSDAP-30A 1kw 2000转JSMA-MB15ABKB/JSDAP-50A3 1.5kwJSMA-MB20ABKB/JSDAP-50A3, 2kwJSMA-MB30ABKB/JSDAP-75A3 3kw东元伺服驱动器分类:原驱动器:JSDE、JSDA、升级版驱动器:JSDEP、JSDAP东元精电驱动器: TSTEP= JSDEP/ JSDETSTAP= JSDAP/ JSDATSTAP-15C=JSDAP-15ATSTAP-20C=JSDAP-20ATSTAP-30C=JSDAP-30ATSTAP-50D=JSDAP-50A3 TSTAP-75D=JSDAP-75A3 TSTAP-100D=JSDAP-100A3 TSTAP-50D=JSDAP-50A3东元伺服驱动器型号解释图:东元伺服电机分类多摩川伺服电机: JSMA-TC01ABK02JSMA-TC02ABK02JSMA-TC08ABK02东元伺服电机:JSMA-SC04ABK01JSMA-LC08ABK01东元精电伺服电机:DTSC06401C3NT3001= JSMA-SC04ABK01 DTSC08751C3NT3001 =JSMA-SC08ABK01DTSC08751C2NH3001=JSMA-LC08ABK01DTSB13102A3NHA001=JSMA-MA10ABK01DTSB13102B3NHA001=JSMA-MB10ABK01DTSB13152B3NHA001=JSMA-MB15ABK01DTSB13202B3NHA001=JSMA-MB20ABK01 东元伺服电机型号解释图。

TSDA系列东元数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. TSDA伺服连接示意图 2. 通电前的检查 3. 通电时的检查 4. TSDA伺服驱动器的参数设定方法 5. TSDA伺服驱动器的参数表 6. TSDA伺服驱动器的参数和性能优化调整 1. TSDA伺服连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在保修范围!) 2. 通电前的检查 1) 确认TSDA伺服驱动器和电机插头的连接,相序是否正确: A.MB中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C FG接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.MB中惯量电机,带刹车制动器电机的连接: 伺服驱动器 电机插头 U B V I W F FG接地 E +24V刹车电源 A 刹车电源 C 2)确认伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4. TSDA伺服驱动器的参数设定方法 1) 按面板“MODE”键,选择显示到参数设定模式。
2) 用 ▲键和 ▼键,选择参数编号值增大或减小。
或用“DATA SET”键,移位。
3) 选择参数编号为想修改的参数号后,按住“DATA SET”键(一秒以上),显示出该参数号的参数值。
4) 用第2)步的方法,修改参数值。
5) 修改参数值完毕,按住“DATA SET”键(一秒以上),显示返回到参数号显示。
注:当参数值,最左边显示“H”时,表示参数为16进制。