超声波电机
- 格式:ppt
- 大小:1.47 MB
- 文档页数:40
超声波探测器的原理是,它发出的声波可以穿透物体,并且可以被物体反射回来。
当物体反射的声波被探测器接收到时,它可以根据反射的声波来推断物体的位置和形状。
此外,它还可以根据反射的声波的强度和频率来推断物体的特性,例如硬度、密度、温度等。
超声波探测器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2。
这就是所谓的时间差测距法。
因此,超声波探测器是一种非接触式测量仪器,广泛应用于测量长度、距离、方向、速度等方面。
电机学超声波电机2012年11月20日简介超声波电机(Ultrasonic Motor,简称USM)是20世纪80年代中期发展起来的一种全新概念的新型驱动装置。
超声波电机是利用压电陶瓷的逆压电效应——在交变电场作用下,陶瓷会产生伸缩的现象——直接将电能转变成机械能,这种电机的工作频率一般在20kHz以上,故称为压电超声波电机。
超声波电动机的不同命名:如振动电动机(Vibration Motor)、压电电动机(Piezoelectric Motor)、表面波电动机(Surface Wave Motor)、压电超声波电动机(Piezoelectric Ultrasonic Motor)、超声波压电驱动器/执行器(Ultrasonic piezoelectric actuator)等等。
超声波电机实物图如下:一.发展1.探索阶段(1948年——20世纪70年代末)1)超声波电动机的概念出现于1948年,英国的Williams和Brown 申请了“压电电动机(Piezoelectric Motor)”的专利,提出了将振动能作为驱动力的设想,然而由于当时理论与技术的局限,有效的驱动装置未能得以实现。
2)1961年,Bulova Watch Ltd.公司首次利用弹性体振动来驱动钟表齿轮,工作频率为360Hz,这种钟表走时准确,每月的误差只有一分钟,打破了那个时代的纪录,引起了轰动。
3)前苏联学者V. V. Lavrinenko 于1964年设计了第一台压电旋转电机,此后前苏联在超声波电机研究领域一度处于世界领先水平,如设计了用于微型机器人的有2 或3 个自由度的超声波电机、人工超声肌肉及超声步进电机等。
不过,由于语言等方面的原因, 前苏联的一些重要研究成果并未被西方科学界所充分了解。
4)1969 年,英国Salfod 大学的两名教授介绍了一种伺服压电电机,这种电机采用二片式压电体结构,其速度、运动形式和方向都可以任意变化,响应速度也是传统结构电机所不能及的。
微特电机课程论文超声波电动机学院:专业班级:学号:姓名:指导教师:日期:摘要超声波电机是一个机电耦合系统,涉及到振动学、摩擦学、材料学、电力电子技术、自动控制技术和实验技术等。
超声波电动机利用压电材料的逆压电特性,激发电机定子的机械振动,通过定转子之间的摩擦力,将电能转换为机械能输出,驱动转子的定向运动。
与传统电机相比,它具有体积小、低速大转矩、反应速度快、不受磁场影响、保持力矩大等优点,是一项跨学科的高新技术。
近几年来超声波电动机已成为国内外在微型电机方面的研究热点。
关键字:超声波电机、逆压电效应、机械振动、高新技术。
一、超声波电动机简介超声波电动机(Ultrasonic Motor缩写USM)是以超声频域的机械振动为驱动源的驱动器。
由于激振元件为压电陶瓷,所以也称为压电马达。
80年代中期发展起来的超声波电机(Ultrasonic motor,USM)是基于功能陶瓷的超声波频率的振动实现驱动的新型驱动器。
超声电机是一个典型的机电一体化产品,由电机本体和控制驱动电路两部分组成。
产品涉及到振动学、波动学、材料学、摩擦学、电子科学、计算技术和实验技术等多个领域。
超声波电动机打破了由电磁效应获得转速和转矩的传统电机的概念,它利用压电材料的逆压电效应,使振动体在超声频段内产生振动,通过定子与动子间的摩擦输出能量。
二、超声波电动机的分类1. 环状或盘式行波型超声波电动机由底部粘接着压电陶瓷元件的环状定子和环状转子构成。
对极化后的压电陶瓷元件施加—定的高频交变电压,在定子弹性体中形成沿圆周方向的弯曲行波。
对定、转子施加一定的预压力,转子受到与行波传播方向相反的摩擦力作用而连续转动,定子上的齿槽用于改善电机的工作性能。
2. 直线式行波型超声波电动机(1)双Langevin振子型:利用两个Langevin压电换能器,分别作为激振器和吸振器,当吸振器能很好地吸收激振器端传来的振动波时,有限长直梁似乎变成了—根半无限长梁,这时,在直梁中形成单向行波,驱动滑块作直线运动。
超声电机原理
超声电机是一种利用超声波产生的机械振动来实现运动的电机。
它具有体积小、效率高、响应速度快、噪音小等优点,因此在各种
领域得到了广泛的应用。
超声电机的工作原理主要包括超声波的产生、传播和转换成机械振动三个方面。
首先,超声电机的工作原理涉及到超声波的产生。
超声波是指
频率高于20kHz的声波,它可以通过压电效应或磁致伸缩效应来产生。
在超声电机中,常用的是压电效应。
当施加电压到压电陶瓷上时,会产生压电效应,使其产生机械振动,从而产生超声波。
这种
超声波具有高频率、短波长的特点,可以实现精细的机械控制。
其次,超声电机的工作原理还涉及到超声波的传播。
超声波在
传播过程中会受到介质的影响,不同介质对超声波的传播速度和衰
减程度都有影响。
因此,在超声电机中需要考虑介质的选择以及超
声波的传播路径,以确保超声波能够准确地传播到需要的位置。
最后,超声电机的工作原理还包括超声波的转换成机械振动。
当超声波传播到需要的位置时,可以通过压电陶瓷或磁致伸缩材料
将超声波转换成机械振动。
这种机械振动可以驱动机械装置实现运
动,如旋转、线性运动等。
由于超声波具有高频率和短波长的特点,因此可以实现微小的机械振动,从而实现精密的位置控制。
总的来说,超声电机的工作原理是通过产生、传播和转换超声
波来实现机械振动,从而实现运动控制。
它具有许多优点,如体积小、效率高、响应速度快、噪音小等,因此在精密仪器、医疗设备、光学设备等领域得到了广泛的应用。
随着科技的不断发展,相信超
声电机在未来会有更广阔的应用前景。
行波型超声波电机及其研究超声波电机是一种新型的电机,它利用超声波的振动来驱动机械运动,具有高效率、高精度、低噪声等优点,成为了近年来研究的热点之一。
行波型超声波电机是其中的一种,其特点是具有较大的运动范围和较高的速度,而且可以实现线性和旋转运动,因此在机器人、精密加工、医疗设备等领域有广泛的应用前景。
一、行波型超声波电机的工作原理行波型超声波电机由振荡器、行波器和负载组成。
振荡器产生高频的电信号,通过行波器将电信号转换成超声波,超声波作用于负载上,使其产生机械运动。
行波器是行波型超声波电机的核心部件,它将电信号转换成超声波,并将超声波传递到负载上,其结构如图1所示。
图1 行波器的结构行波器由压电陶瓷片和金属板组成,压电陶瓷片是电能和机械能转换的元件,当施加电场时,压电陶瓷片会发生形变,产生超声波。
金属板是行波器的传导部分,它将超声波从压电陶瓷片传递到负载上。
行波器的工作原理是利用压电效应和声波在介质中的传播特性,将电信号转换成超声波,并将超声波传递到负载上,从而实现机械运动。
二、行波型超声波电机的优点1. 高效率行波型超声波电机的效率比传统电机高,因为它不需要机械传动,直接利用超声波的振动来驱动机械运动。
在高速运动时,行波型超声波电机的效率更高,可以达到90%以上。
2. 高精度行波型超声波电机的精度很高,因为它可以实现微小的运动,且不会受到机械传动误差的影响。
在精密加工、医疗设备等领域有广泛的应用。
3. 低噪声行波型超声波电机的噪声很低,因为它不需要机械传动,避免了机械传动带来的噪声。
在医疗设备、音响设备等领域有广泛的应用。
4. 大运动范围行波型超声波电机的运动范围可以很大,可以实现线性和旋转运动,且速度较快。
在机器人等领域有广泛的应用。
三、行波型超声波电机的应用1. 机器人行波型超声波电机可以实现线性和旋转运动,且速度较快,因此在机器人的关节上有广泛的应用。
行波型超声波电机还可以用于机器人的手臂、爪子等部件,实现精密的抓取和放置。
超声波电机工作原理
超声波电机是一种利用超声波振动产生机械运动的电机,其工作原理基于超声波的压电效应和谐振效应。
以下是超声波电机的基本工作原理:
1. 压电效应:超声波电机的关键部件是由压电陶瓷构成的振动片。
压电陶瓷具有压电效应,即当施加电场时,陶瓷发生机械变形,而当施加机械应力时,陶瓷产生电场。
2. 超声波振动产生:通过在压电陶瓷上施加高频交变电压,可以使陶瓷片振动,产生超声波。
这种超声波通常在20 kHz以上,远远超出人耳可听范围。
3. 谐振效应:超声波电机采用谐振效应,即在特定的频率下,振动片的振动幅度达到最大值。
通过调整施加在压电陶瓷上的电压频率,使其与振动片的谐振频率匹配,可以提高振动效率。
4. 工作部件:超声波电机中通常包含振动片、导向块和负载。
振动片振动时,通过导向块将振动传递到负载上,从而实现机械运动。
5. 无刷结构:由于超声波电机是通过振动产生机械运动,通常不需要传统电机中的刷子和换向器。
因此,超声波电机具有无刷结构,减少了摩擦和磨损。
超声波电机的优点包括高效率、精密控制、低噪音、无电磁干扰等特点。
它在一些需要高精度、低噪音、快速响应的应用领域得到广泛应用,如光学设备、精密仪器、医疗器械等。
超声波电机介绍及其应用一、超声波电机的工作原理超声学科结合的新技术。
超声电机不像传统的电机那样,利用电磁的交叉力来获得其运动和力矩。
超声电机则是利用压电陶瓷的逆压电效应和超声振动来获得其运动和力矩的,将材料的微观变形通过机械共振放大和摩擦耦合转换成转子的宏观运动。
二、超声波电机的产生20 世纪90 年代日本佳能公司研制出一种压电电动机,这种电动机的工作原理是利用逆压电效应把电能转换成机械能。
常见的压电电机也是由定子和转子组成,但定子是由压电材料和金属材料组合制成,转子是由金属材料制成;压电材料把电能转换成机械振动能,激励定子金属体振动;转子与定子相接触,通过摩擦力,定子的振动驱动转子运动。
由于定子的振动频率一般在大于20kHz 的超声频段,因此人们也将压电电机称为超声电机。
三、超声波电机的特点(1)超声电机可以得到较低转速,因此输出力矩较大,可以省去减速机构直接带动负载。
(2)因为超声电机不使用电磁场作为驱动力,因此电磁辐射小。
许多情况下,不希望有电机产生强电磁干扰,或者在强磁场环境中,电磁电机的正常工作会受到影响,而超声电机不需要做太多的电磁屏蔽处理就可以在这些条件下工作。
(3)超声电机依靠定、转子之间的接触摩擦作为驱动方式,关闭电源后转子就会马上停止,并在摩擦力的作用下固定不动(4)超声电机的响应时间较短,一般在十几毫秒以内。
(5)超声电机没有电磁线圈,可以不用铜材,节省原料造价。
(6)超声电机的转速可以通过改变驱动频率进行调节,比较灵活。
(7)超声电机在很小尺寸上都可以有效工作。
四、超声电机的分类(1)环形行波超声波电机。
在弹性体内产生单向的行波,利用行波表面质点的振动来传递能量,属连续驱动方式,其基础理论和应用技术均较成熟。
(2)小型柱体摇摆型超声波电机目前行波型超声波电机已有较成熟的设计方法,但该型电机在小直径(小于20mm)条件下,输出性能逐渐失去低速大扭矩的特点,而且由于其结构的限制,效率也很难提高。

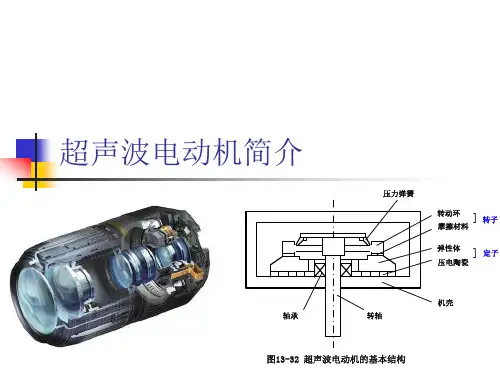
超声波电机的结构
超声波电机(Ultrasonic Motor)是一种利用超声波振动能量进行驱动的特殊电机。
它主要由定子、转子和其他辅助部件组成。
一、定子
定子是超声波电机的主要组成部分之一,通常由金属材料制成。
定子通常具有两个或多个振荡器,这些振荡器是用来产生超声波振动的。
定子上的振荡器通常是通过在金属材料上刻蚀或钻孔来制造的,这样可以在定子上形成一系列的振动节点和振动位移。
二、转子
转子是超声波电机的另一个重要组成部分,它通常由非金属材料制成,如陶瓷、玻璃或碳纤维等。
转子通常具有一个或多个超声波振动膜片,这些膜片是用来接收定子产生的超声波振动并转换成转动的动力。
转子上的膜片通常是通过在非金属材料上切割或钻孔来制造的,这样可以在转子上形成一系列的振动节点和振动位移。
三、辅助部件
除了定子和转子之外,超声波电机还需要一些辅助部件来确保其正常运转。
这些辅助部件包括:
1.驱动电路:用于产生高频振荡信号,驱动定子产生超
声波振动。
2.位置传感器:用于检测转子的位置和速度,确保电机
能够准确地控制转子的运动。
3.散热器:用于降低电机内部的温度,防止过热对电机
造成损坏。
4.轴承:用于支撑转子,减少摩擦和磨损,提高电机的
使用寿命。
总之,超声波电机是一种利用超声波振动能量进行驱动的特殊电机,它主要由定子、转子和辅助部件组成。
这些组成部分协同工作,使得超声波电机能够实现高精度、高速度和高效率的驱动。
超声波电机的工作原理
1 超声波电机
超声波电机是一种新型的无极变速电机,它的概念来源于无极步
进电机的原理。
它的基本原理是利用来自多个超声波发射器的超高频
信号来改变电机的转速。
这对传统的步进电机的控制有着巨大的改变。
构成
超声波电机的主要组件由多个超声波发射器、接收器和控制电路
组成。
每个超声波发射器负责将一定频率的超声波脉冲发送出去。
接
收器将接收电机发出的超声波脉冲转变为电信号,然后经由控制电路
对电机进行控制。
原理
超声波电机是一种发射和接收超声波信号来控制电机转速的无极
变速器。
当多个超声波发射器发送超声波信号时,电机体内的接收器
将接收到超声波信号,并将之转化为电信号。
控制电路则接收到转变
后的电信号,根据其不同频率来控制电机的转速或者是发出停止命令。
优势
超声波电机拥有无极变速电机的许多优点,其输出功率强、切换
灵活,不受电源造成的噪声干扰,稳定且高效。
此外,超声波电机的
信号可以传播任何距离,不受任何电磁干扰。
最后,超声波电机还可
以通过调整频率来改变电机的转速,从而满足用户对变速的要求。
结论
超声波电机的技术并不难,但它的应用非常广泛。
它能解决很多变速性能低、受电源影响大等方面的问题,同时满足大多数应用情况下的控制要求,而且具有很好的稳定性、高效率。
圆筒型行波型超声电机一、简介1942年williams和Brown提出超声电机的概念,1981年日本新生工业(Shinsei)公司的总裁指田年生(Toslliiku sashida)制作了世界上第一台具有实用价值的振动片型超声波马达,自那时以来各种新型式的超声电机不断涌现,例如按驱动形式可分为行波型超声电机旧、复合型超声电机M1及多自由度超声电机.为增大定转子之间接触区形状和面积,提高马达的转矩,提出了一种柱面驱动行波超声电机,它的接触区域不同于以往的圆板和圆环超声电机,它是以圆柱面母线为中心的矩形区域,沿轴向接触具有一致性,提高定转子之间的预紧力和接触面积,从而提高了电机的力矩输出。
二、行波型超声电机的结构行波型超声电机(TRUM)是从上个世纪八十年代发展起来的一种新型微特电机,是最具代表性和当前应用最多的一类超声电机。
本文所述的这种筒状行波超声电机,定子为筒状,结构如图1所示。
图1 圆筒型行波超声电机传统的圆板型定子被新型圆筒定子代替。
压电陶瓷元件粘贴在圆通定子外壁上的合适位置,而在传统电机中,是贴在圆板型定子的底端面。
值得一提的是用于前者上的压电陶瓷比后者更易于加工,成本更低。
图2所示为粘贴有压电陶瓷的圆筒型定子和圆筒式定子主体,长条形的是PZT。
图2 粘有PZT的圆筒定子因为定子的特殊结构及有两个端面,如果两个端面都是自由的,就都会产生行波,而且这两个行波的运动方向相同。
如果用两个同轴转子与定子配合,随着摩擦力的增加,电机的输出力矩也将会增加。
虽然这样会给电机带来新的问题,但值得一试。
三、工作原理超声电机的机理是基于压电陶瓷的换能器,利用压电陶瓷的逆压电效应.把电能转换成机械能。
本文所提的电机采用的是薄片状压电陶瓷,沿厚度方向极化,压电振子的振动模式是垂直于极化方向的伸缩振动。
在两组压电陶瓷元件上分别施加相位差为π/2的同频率(超声频段内)、等幅麦变电压,通过压电陶瓷元件的逆压电效,可以在定于的模态频率上激发出幅值相等、在时间和空间上均相差π/2的模态响应。
五种新型电机简介姓名:赵涛学号:1、超声波电机简介:原理:超声波电机就是利用超声波频率范围内的机械振动来获得动力源的装置,借助摩擦传递弹性超声波振动以获得动力。
超声波电机获得能量的超声波振动源又与压电陶瓷有着密切联系,当对压电陶瓷施加交变电压时,压电陶瓷本身或压电陶瓷和金属的混合体就会产生周期性地伸缩,即逆压电效应,通过这种伸缩,电机产生了动力。
人耳所能听到的的声音频率约为20Hz-20KHZ,而当频率超过20KHz以上,人耳便无法辨识,成为超声波。
对超声波电机的压电材料输入电压所产生的是晶体的形变,因此利用压电材料来带动转子,其前进的距离相当小,约是微米等级,因此若要此电机做长距离运动,就必须输入超声波的高频电压,使定子产生极高的振动频率才能得到合适的转速,这也正是超声波电机的由来。
特点: 1、超声波电机弹性振动体的振动速度和依靠摩擦传递能量的方式决定了它是一种低速电机,同时其能量密度是电磁电机的5到10倍左右,使得它不需要减速机构就能低速时获得大转矩,可直接带动执行机构。
2、超声波电机的构成不需要线圈与磁铁,本身不产生电磁波,所以外部磁场对其影响较小。
3、超声波电机断电时,定子与转子之间的静摩擦力使电机具有较大的静态保持力矩,从而实现自锁,省去了制动闸,简化了定位控制,其动态响应时间也较短。
4、超声波电机依靠定子的超声振动来驱动转子运动,超声振动的振幅一般在微米数量级,在直接反馈系统中,位置分辨率高,容易实现较高的定位控制精度。
应用:1、超声波电机可用于照相机的自动聚焦系统的驱动器;航空航天领域的自动驾驶仪伺服驱动器;机器人或微型器械自动控制系统的驱动器;高级轿车门窗和座椅靠头调节的驱动装置;窗帘或百叶窗自动启闭装置;2、医学领域的人造心脏驱动器、人工关节驱动器;强磁场环境下设备的驱动装置,如磁悬浮列车的控制系统;不希望驱动装置产生磁场的场合,如磁通门的自动测试转台等。
2、无刷直流电动机:原理:无刷永磁电动机伺服系统主要由4个部分组成:永磁同步电动机MS、转子位置检测器BQ、逆变器和控制器。