ragel学习
- 格式:doc
- 大小:363.00 KB
- 文档页数:7
强化学习(Reinforcement Learning, RL)是一种机器学习方法,它通过代理在与环境的互动中学习如何做出决策来最大化累积奖赏。
RL 中的核心问题是探索与利用的权衡,以及如何在不确定性环境下做出最优决策。
近年来,强化学习在许多领域取得了巨大的进展,并成为人工智能领域备受关注的研究方向之一。
在强化学习算法中,反向动力学方法是一种重要的学习策略。
与传统的基于值函数或策略函数的方法不同,反向动力学方法直接学习动作值函数或动作策略函数。
本文将详细介绍反向动力学方法在强化学习中的应用及其原理。
一、反向动力学方法的基本原理在强化学习中,代理与环境不断进行交互,代理根据环境的反馈调整自己的决策策略。
反向动力学方法的核心思想是从输出开始反向计算输入对应的价值函数或策略函数,以此来更新参数。
与直接从输入到输出的前向计算相比,反向动力学方法更适用于高维复杂的问题,并且能够在参数更新过程中更好地处理梯度消失和梯度爆炸等问题。
二、反向动力学方法在深度强化学习中的应用深度强化学习是指将深度学习技术应用于强化学习中,以解决高维、复杂环境下的决策问题。
在深度强化学习中,反向动力学方法被广泛应用于价值函数的估计和策略函数的优化。
通过神经网络逼近动作值函数或动作策略函数,可以有效地处理高维状态空间和动作空间,并且能够对复杂的非线性关系进行建模。
三、反向动力学方法的算法实现在实际应用中,反向动力学方法通常采用基于梯度的优化算法进行参数更新。
常用的算法包括随机梯度下降(Stochastic Gradient Descent, SGD)、Adam、RMSProp 等。
这些算法通过不断地迭代更新参数,使得神经网络逼近目标函数,并且能够处理高维、非凸的优化问题。
四、反向动力学方法的改进与应用近年来,学者们提出了许多改进的反向动力学方法,以应对深度强化学习中的挑战。
例如,基于自适应激励的增强学习方法(Intrinsically Motivated Reinforcement Learning, IMRL)可以有效地解决探索与利用的平衡问题;基于元学习的方法可以在少样本学习的场景下实现快速收敛。
gail 参数参考内容:Gail参数是一种用于机器学习和数据挖掘的算法参数调优方法,用于优化模型性能和提高预测准确率。
Gail参数可以通过系统地搜索和比较不同参数组合的性能来找到最佳参数配置。
在本文中,我们将介绍一些常用的Gail参数和调优方法,以及如何使用它们来改善模型性能。
1. 学习率(Learning Rate):学习率是影响模型收敛速度和准确率的一个重要参数。
学习率越小,模型需要更多的迭代次数才能收敛;学习率越大,模型可能无法收敛或收敛至次优解。
因此,选择合适的学习率非常关键。
2. 正则化(Regularization):正则化是一种用来控制模型复杂度和防止过拟合的技术。
正则化项通常包括L1正则化和L2正则化。
L1正则化倾向于生成稀疏解,而L2正则化可以生成更平滑的解。
通过调整正则化参数(如L1或L2的惩罚系数),可以控制模型的复杂度,从而提高模型的泛化能力。
3. 批量大小(Batch Size):批量大小指的是在训练过程中用于更新模型参数的样本数。
较小的批量大小可以使模型更快收敛,但计算效率更低,而较大的批量大小则可以提高计算效率,但更容易陷入局部最优。
因此,合理选择批量大小可以加快训练速度并提高模型性能。
4. 优化算法(Optimization Algorithm):优化算法用于更新模型参数以最小化损失函数。
常用的优化算法有随机梯度下降(SGD)、动量梯度下降(Momentum)、Adam等。
不同的优化算法具有不同的更新策略和收敛速度。
通过选择合适的优化算法,可以加速模型收敛并提高预测准确率。
5. 激活函数(Activation Function):激活函数是神经网络中的非线性映射,用于引入非线性特征。
常用的激活函数有sigmoid、ReLU、tanh等。
选择合适的激活函数可以增加模型的灵活性,提高模型的表达能力。
6. 隐藏层数量和隐藏层大小:神经网络的隐藏层数量和隐藏层大小是影响模型容量和复杂度的重要参数。

RRL总结引言RRL(Recurrent Reinforcement Learning)是一种结合了递归和强化学习的方法,它在序列性任务中取得了很好的效果。
本文将对RRL进行总结,包括其原理、特点以及应用领域。
原理RRL的基本原理是将递归神经网络(RNN)与强化学习相结合。
RNN是一种具有记忆能力的神经网络,可以处理序列数据。
强化学习是一种通过与环境的交互来优化决策策略的学习方法。
RRL利用RNN来保持对过去信息的记忆,并使用强化学习算法来优化策略。
RRL的主要步骤如下:1.初始化RNN的参数和强化学习的参数。
2.通过与环境的交互收集序列数据。
3.将序列数据输入RNN中进行处理,得到隐藏状态。
4.使用隐藏状态和当前状态作为输入,通过强化学习算法计算行为的概率分布。
5.根据行为的概率分布选择行为,并与环境进行交互。
6.根据奖励信号调整策略参数和值函数参数。
7.重复步骤2-6直到达到停止条件。
特点RRL具有以下几个特点:1.强化学习与递归神经网络的结合:RRL利用RNN的记忆能力来处理序列数据,通过与环境的交互来优化策略,在序列性任务中取得了较好的效果。
2.考虑过去信息:RNN可以保持对过去信息的记忆,通过记忆的信息和当前状态一起进行决策,更好地考虑到了过去的影响。
3.适应不同环境:RRL可以适应不同的环境,通过与环境的交互不断优化策略,提高在不同任务上的性能。
4.可解释性强:RRL可以通过对RNN的参数进行分析,了解网络对过去信息的处理方式,并根据需求进行改进。
应用领域RRL在许多序列性任务中取得了显著的成果,主要应用于以下领域:1.机器翻译:RRL可以处理源语言和目标语言之间的序列对应关系,通过考虑上下文信息来提高翻译质量。
2.语音识别:RRL可以处理连续的语音信号,并根据过去的语音信号进行识别,提高识别的准确率。
3.自然语言处理:RRL可以处理文本序列数据,并根据上下文信息进行语义理解、情感分析等任务。
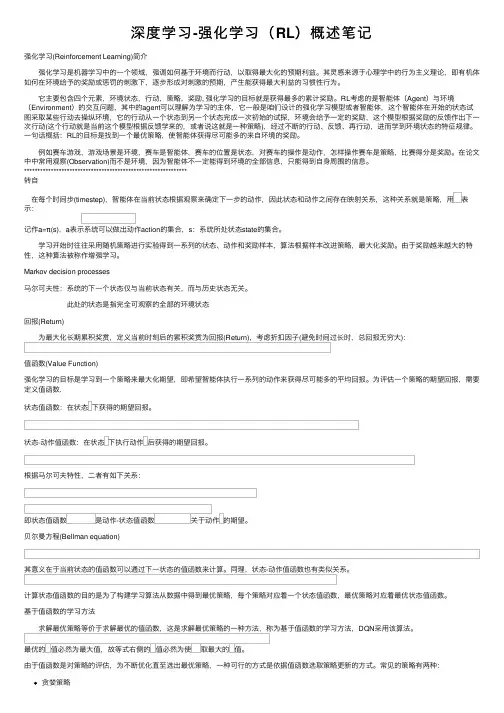
深度学习-强化学习(RL)概述笔记强化学习(Reinforcement Learning)简介 强化学习是机器学习中的⼀个领域,强调如何基于环境⽽⾏动,以取得最⼤化的预期利益。
其灵感来源于⼼理学中的⾏为主义理论,即有机体如何在环境给予的奖励或惩罚的刺激下,逐步形成对刺激的预期,产⽣能获得最⼤利益的习惯性⾏为。
它主要包含四个元素,环境状态,⾏动,策略,奖励, 强化学习的⽬标就是获得最多的累计奖励。
RL考虑的是智能体(Agent)与环境(Environment)的交互问题,其中的agent可以理解为学习的主体,它⼀般是咱们设计的强化学习模型或者智能体,这个智能体在开始的状态试图采取某些⾏动去操纵环境,它的⾏动从⼀个状态到另⼀个状态完成⼀次初始的试探,环境会给予⼀定的奖励,这个模型根据奖励的反馈作出下⼀次⾏动(这个⾏动就是当前这个模型根据反馈学来的,或者说这就是⼀种策略),经过不断的⾏动、反馈、再⾏动,进⽽学到环境状态的特征规律。
⼀句话概括:RL的⽬标是找到⼀个最优策略,使智能体获得尽可能多的来⾃环境的奖励。
例如赛车游戏,游戏场景是环境,赛车是智能体,赛车的位置是状态,对赛车的操作是动作,怎样操作赛车是策略,⽐赛得分是奖励。
在论⽂中中常⽤观察(Observation)⽽不是环境,因为智能体不⼀定能得到环境的全部信息,只能得到⾃⾝周围的信息。
*************************************************************转⾃ 在每个时间步(timestep),智能体在当前状态根据观察来确定下⼀步的动作,因此状态和动作之间存在映射关系,这种关系就是策略,⽤表⽰:记作a=π(s),a表⽰系统可以做出动作action的集合,s:系统所处状态state的集合。
学习开始时往往采⽤随机策略进⾏实验得到⼀系列的状态、动作和奖励样本,算法根据样本改进策略,最⼤化奖励。
由于奖励越来越⼤的特性,这种算法被称作增强学习。
rl模型简易理解强化学习(Reinforcement Learning,简称RL)是机器学习的一种类型,它关注如何让强化学习(Reinforcement Learn ing,简称RL)是机器学习的一种类型,它关注如何让智能体(A gent)在与环境的交互中学习到最优的行为策略。
强化学习的核心思想是通过试错来学习,智能体通过与环境的交互,不断地尝试不同的行为策略,从而获得最大的累积奖励。
在这个过程中,智能体会根据环境的反馈(奖励或惩罚)来调整自己的行为策略,以期望在未来的交互中获得更好的结果。
强化学习的基本原理可以概括为以下几个部分:1. 智能体(Agent):在强化学习中,智能体是一个能够感知环境、采取行动并从环境中获取反馈的主体。
智能体的目标是学习到一个最优的行为策略,使得在长期与环境的交互中能够获得最大的累积奖励。
2. 环境(Environment):环境是智能体所处的外部世界,它提供了智能体与外界交互的接口。
环境会根据智能体的行为策略给出相应的反馈(奖励或惩罚),帮助智能体学习到更好的行为策略。
3. 状态(State):状态是描述环境在某个时刻的特征信息。
在强化学习中,智能体需要根据当前的状态来决定采取何种行为策略。
状态可以是离散的或连续的,取决于具体的应用场景。
4. 动作(Action):动作是智能体在特定状态下可以采取的行为。
动作可以是离散的或连续的,取决于具体的应用场景。
智能体通过执行动作来改变环境的状态,并获得环境的反馈。
5. 奖励(Reward):奖励是环境对智能体行为的反馈,用于指导智能体学习行为策略。
当智能体采取某个动作后,环境会根据动作的效果给出一个奖励值。
智能体的目标就是最大化累积奖励,即在长期与环境的交互中获得尽可能多的奖励。
6. 策略(Policy):策略是智能体在特定状态下选择动作的方法。
策略可以是确定性的,也可以是随机性的。
确定性策略表示在每个状态下都选择同一个动作;随机性策略表示在每个状态下以一定的概率选择不同的动作。
深度强化学习中的经验回放方法解析深度强化学习(Deep Reinforcement Learning, DRL)是一种结合了深度学习和强化学习的新兴领域,它在处理复杂的决策问题上展现出了巨大的潜力。
经验回放(Experience Replay)是深度强化学习中的一种重要方法,通过存储和重复利用先前的经验数据来提高学习的效率和稳定性。
本文将对深度强化学习中的经验回放方法进行解析,探讨其原理、优势以及应用。
一、经验回放的原理经验回放是指在强化学习中,智能体会将其经验存储在一个经验池(Experience Pool)中,然后在训练时从中随机抽取一部分经验来进行学习。
这种方法的核心思想是将过去的经验进行重复学习,避免了样本之间的相关性,增强了学习的效率和稳定性。
在深度强化学习中,经验回放的具体实现包括两个关键步骤:经验采集和经验存储。
在经验采集阶段,智能体与环境进行交互,收集到的经验(包括状态、动作、奖励等)会被存储到经验池中。
在经验存储阶段,经验池中的数据会被不断更新和替换,以确保其中的经验数据是最新和最丰富的。
二、经验回放的优势经验回放方法在深度强化学习中具有诸多优势,主要包括以下几点:1. 提高数据利用率:经验回放可以让智能体多次利用先前的经验数据,避免了数据的浪费和冗余,提高了数据的利用率。
2. 缓解数据相关性:在强化学习中,相邻时刻的经验数据通常是高度相关的,这会导致模型学习的不稳定性。
经验回放通过随机抽样的方式打破了样本之间的相关性,提高了学习的稳定性。
3. 增强学习效率:通过重复学习先前的经验,智能体可以更有效地学习到环境的动态特性和规律,提高了学习的效率和速度。
4. 改善收敛性能:经验回放可以平滑训练过程中的波动,提高了模型的收敛速度和性能。
三、经验回放的应用经验回放方法已经被广泛应用于深度强化学习的各个领域,取得了显著的效果和成就。
其中,深度 Q 网络(Deep Q-Network, DQN)是最典型的应用之一。
e-learning分享:教您如何让e-Learning 变得更有效hc360慧聪网教育行业频道2004-04-21 08:25:53e-Learning在企业中变得越来越时髦、越来越普及,但是,如何让e-Learing变得更有效?学会4个p也许有点帮助。
它们分别是:呈现方式(Presentation)、教育学问题(Pedagogy)、准备(Preparation)、支持(Props)。
*呈现方式:Presentation有效的e-Learning首先应该注意它的呈现方式。
刻板的、完全都是文字的屏幕会让我们感到厌倦。
而形象的图表能够激发大脑对信息的处理,从而让我们被面对的视觉环境所吸引,有更大的兴趣往下探究。
因此,设计e-Learning时,千万不要忘记给人以良好的视觉感受。
当然,也不要只记住“形式”而忘却了“内容”。
事实上,文本呈现的方式,对于学习者的学习兴趣而言,也会产生很大的影响。
因此,内容要充实,而文字要简单、准确。
因为没有人愿意花很多的时间来理解晦涩的文字,也没有人愿意对没有真实内容的东西感兴趣。
*教育学问题:Pedagogye-Learning是学习方式在信息时代的一种新拓展,所以,不能忘记它还是一个教育学问题,不能撇开对于人们学习规律的理解而自行其是。
尽管现在的教育理论对于e-Learing的解释还不十分充分,但是,对于人们学习规律的探索,是教育理论的强项。
教育理论研究的一个成果是,它提示了有效的学习更取决于人们对于学习环境的情感体验,而不是对于学习技术和结构的信赖。
这告诉我们,要提高学习效率,应该让人们感到有参与感、并受到激励。
*准备:Preparation在线学习所要求的学习技能和心智模式,与传统环境下的学习不尽相同。
因此,学习者充分的准备也相当重要。
这包括要求学习者从对教师指导和认可依赖转向更为独立的思考,以内在动机来替代外在动机,不断培养学习者自身的学习能力。
此外,学习者还要逐渐习惯于以屏幕为基础,而非以纸笔为基础的学习环境。
《深度强化学习理论及其应用综述》篇一一、引言近年来,人工智能技术发展迅速,深度强化学习(Deep Reinforcement Learning,简称DRL)作为其中的一种重要技术,在众多领域中获得了广泛的应用。
深度强化学习是一种将深度学习与强化学习相结合的算法,旨在解决序列决策问题。
本文将对深度强化学习的理论及其应用进行综述,以期为相关领域的研究和应用提供参考。
二、深度强化学习理论1. 强化学习强化学习是一种通过试错学习的机器学习方法,其核心思想是让智能体在与环境的交互中,通过不断试错和积累经验来优化策略。
强化学习主要包含环境、智能体和策略三个要素。
其中,环境为智能体提供交互场景,智能体根据当前状态和策略进行决策并作用于环境,通过观察环境的变化和获得的回报来优化自身的策略。
2. 深度学习深度学习是一种模拟人脑神经网络的机器学习方法,具有较强的学习和泛化能力。
深度学习的主要特点在于可以通过大量数据训练来自动提取高层次的特征信息,适用于复杂和抽象的序列决策问题。
3. 深度强化学习深度强化学习是强化学习与深度学习的结合,其通过深度神经网络来学习和优化策略。
在深度强化学习中,智能体可以同时学习到环境的动态变化和决策的规律性信息,从而更好地适应环境变化和做出更好的决策。
三、深度强化学习的应用深度强化学习在众多领域中得到了广泛的应用,如游戏、自动驾驶、医疗、金融等。
在游戏领域,深度强化学习算法使得智能体可以快速学习和掌握复杂的游戏规则和策略,从而在各种游戏中取得优异的成绩。
在自动驾驶领域,深度强化学习算法可以帮助智能车辆在复杂的交通环境中进行决策和控制,实现安全、高效的自动驾驶。
在医疗领域,深度强化学习算法可以用于辅助医生进行疾病诊断和治疗决策等任务。
在金融领域,深度强化学习算法可以用于股票交易、风险管理等任务。
四、深度强化学习的挑战与展望尽管深度强化学习在众多领域中取得了显著的成果,但仍面临着一些挑战和问题。
深度强化学习求解流程1.首先,我们需要定义问题并确定环境。
First, we need to define the problem and determine the environment.2.然后,我们需要选择合适的深度强化学习模型。
Next, we need to choose an appropriate deep reinforcement learning model.3.接着,我们要设计合适的奖励函数。
Then, we need to design a suitable reward function.4.在完成模型设计后,还需要对模型进行训练。
After the model design is completed, the model needs to be trained.5.训练后的模型需要进行测试和评估。
The trained model needs to be tested and evaluated.6.根据测试结果,我们需要对模型进行调整和优化。
Based on the test results, we need to adjust and optimize the model.7.完成模型优化后,我们还需要进行进一步的测试和评估。
After optimizing the model, further testing andevaluation are needed.8.最终,我们需要将模型部署到实际环境中进行应用。
Finally, we need to deploy the model for application inthe actual environment.9.深度强化学习求解流程需要谨慎设计和严格执行。
The process of solving deep reinforcement learningrequires careful design and strict execution.10.每个步骤都需要认真对待,以确保最终结果的准确性和可靠性。
ragel 语法
Ragel 是一种用于构建状态机的编程语言。
Ragel 语法定义了
如何将输入流转换为输出流的规则。
以下是 Ragel 的一些常见
语法结构:
1. 状态指令:用于声明各个状态以及它们之间的转换关系。
例如:`action at_done { break; }` 表示在状态结束时执行
`at_done` 动作并跳转到下一个状态。
2. 规则指令:用于定义状态机的输入和输出。
例如:
`any* >{action}` 表示匹配任意数量的字符,并在匹配完成时
执行 `action`。
3. 动作指令:用于在匹配某个规则时执行特定的操作。
例如:`{ counter += 1; }` 表示在匹配规则时将计数器加一。
4. 跳转指令:用于改变状态转换的流程。
例如:`goto state;`
表示跳转到名为 `state` 的状态。
5. 控制指令:用于控制状态机的执行流程。
例如:`fgoto ok = eof;` 表示在结束状态为`ok` 或输入流结束时跳转到状态`eof`。
这些只是 Ragel 语法的一些基本结构,实际的语法规则更为复
杂和灵活,以满足实际应用的需求。
在 Ragel 中,可以通过组
合这些语法结构来构建复杂的状态机,并在匹配和转换过程中执行相应的动作。
Struggle记忆方法引言记忆是人类认知能力的重要组成部分,它对于学习、工作和生活都具有重要意义。
然而,我们常常遇到记忆困难的问题,例如忘记事项、记不住名字等。
针对这些问题,我们可以采用不同的记忆方法来帮助自己更好地记忆。
本文将重点介绍一种名为”Struggle记忆方法”的有效记忆技巧,帮助读者提高记忆能力。
什么是Struggle记忆方法?Struggle记忆方法是一种基于认知心理学的记忆技巧。
它的核心理念是通过与记忆过程中的障碍和挫折进行斗争,从而创建更深刻的记忆印象。
这种方法利用记忆过程中的困难和挑战,激发大脑的注意力和思考能力,从而加强记忆效果。
如何运用Struggle记忆方法?1. 创造挑战在使用Struggle记忆方法时,首先需要明确学习或记忆的内容。
然后,创造一些挑战来提高记忆的难度。
这可以通过以下几种方式实现:•设置时间限制:在有限的时间内尝试记住尽可能多的信息。
•制造干扰:在记忆过程中加入一些干扰因素,如噪音、其他任务等,以增加记忆的困难度。
•混淆顺序:将学习的内容进行乱序排列,需要通过思考和整理来确定正确的顺序。
2. 解决障碍Struggle记忆方法强调在记忆过程中遇到障碍时的解决能力。
当记忆过程中遇到困难或无法记住的部分时,可以尝试以下几种方法来解决障碍:•分析和理解:仔细分析难题的特点和要求,加深对内容的理解。
•创造关联:将要记忆的内容与已有的知识和经验进行关联,以帮助记忆。
•制定复习计划:当你发现某些内容无法在短时间内记住时,可以将其记录下来并制定一个复习计划,分散学习,增加记忆的机会。
3. 反思和总结在记忆的过程中,定期反思和总结是十分重要的一步。
反思和总结有助于加深记忆的印象,同时也为以后的记忆提供参考。
•反思过程中,可以回顾记忆过程中遇到的困难和解决方法,分析哪些方法有效、哪些方法需要改进。
•总结可以通过写下学习笔记、制作思维导图等方式进行。
将学习的内容进行整理和归纳,可以帮助记忆巩固。
深度强化学习(Deep Reinforcement Learning,DRL)作为一种结合深度学习和强化学习的新兴技术,已经在诸多领域展现出了惊人的潜力。
然而,DRL在实际应用中面临着许多挑战,其中之一便是训练样本的稀缺性和样本的高度相关性。
为了解决这一问题,经验回放(Experience Replay)方法被提出并得到了广泛的应用。
本文将对深度强化学习中的经验回放方法进行解析,并探讨其在强化学习中的作用和意义。
深度强化学习是一种通过智能体与环境的交互来学习最优行为策略的机器学习方法。
在DRL中,智能体通过与环境的交互来不断尝试和学习,以获得最大的累积奖励。
然而,直接使用当前的样本进行训练会导致样本之间高度相关,使得训练过程不稳定,甚至无法收敛。
这就需要引入经验回放方法来解决这一问题。
经验回放方法的核心思想是将智能体在与环境交互得到的样本存储在经验池(Experience Pool)中,并随机抽样进行训练。
这样做的好处是可以打破样本之间的相关性,使得训练过程更加稳定。
此外,经验回放还可以充分利用之前的学习经验,提高样本的利用率,从而加快学习速度。
在经验回放方法中,经验池起到了至关重要的作用。
经验池中存储了智能体与环境交互得到的样本,包括状态、动作、奖励等信息。
通过对经验池进行抽样,智能体可以利用这些样本进行训练,从而提高学习效率和性能。
除了提高训练效率外,经验回放方法还具有其他一些优点。
首先,它可以实现样本的重复利用,使得智能体可以从之前的经验中学习,而不仅仅局限于当前的样本。
其次,经验回放方法还可以平衡探索(Exploration)和利用(Exploitation)的权衡,使得智能体可以在不同的状态下进行更加均衡的学习。
然而,经验回放方法也并非没有缺点。
首先,经验池的容量问题会影响到经验回放的效果。
如果经验池的容量过小,可能会导致智能体无法充分利用之前的经验;反之,如果经验池的容量过大,可能会增加训练的时间和空间复杂度。
Ragel学习笔记解决的问题采用一个连续的可能庞大的正则表达式,可以有一些分块式action,或者只是判断某一串符合此表达式。
采用解决问题模型为有限状态机。
语法嵌入C, C++, Objective-C, D, Go,Java and Ruby.多行代码%%{… …}%%单行代码%%实例代码#include <string.h>#include <stdio.h>%%{machine foo;main :=( 'foo' | 'bar' )0 @{ res = 1; };}%%%% write data;int main( int argc, char **argv ){int cs, res = 0;if ( argc > 1 ) {char *p = argv[1];char *pe = p + strlen(p) + 1;%% write init;%% write exec;}printf("result = %i\n", res );return 0;}状态机名machine fsm_name;必须在块开头注明,如上例。
如果没注明则用先前使用的,如没有则报错。
可以采用多文件编译include为关键字导入文件。
定义语句<name> = <expression>;名为name的state直到定义实例化(被引用时(下一个为:=形式))才生成,该语句类似一个类的定义状态机实例化<name> := <expression>;该语句产生状态机的一个状态,名为main的状态为初始start状态。
%% write init // 该命令设置cs (current_state) 为main的状态,即为start状态如果没有main 则最近一个实例化的状态即为开始状态。
在外部执行控制语句可以通过设置cs来设置状态机,内部执行,采用fcall fgoto fnext实现状态切换。
armlogel使用方法ARMLPEG(Assistant for Robotic Manipulation with Laparoscopic Proximal Element Game) 是一种用于机器人 manipulation 的任务规划工具,可以用于 Laparoscopic Surgery 场景下。
它的主要思想是利用强化学习算法,通过训练机器人控制器来优化机器人在 Laparoscopic Surgery 场景下的操纵能力。
ARMLPEG 的使用方法如下:1. 创建一个 ARMLPEG 的实例。
在 ARMLPEG 中,你需要指定一个控制空间(例如:关节角度),以及任务的目标和奖励函数。
2. 创建一个机器人控制器。
在 ARMLPEG 中,你可以使用强化学习算法 (例如:Q-Learning) 来训练机器人控制器。
你需要指定机器人控制器的目标,即最大化机器人在任务空间中的得分。
3. 创建一个任务。
在 ARMLPEG 中,你可以创建一个任务,并将其分配给机器人控制器。
任务通常包括操纵机器人在不同位置之间移动,或者在Laparoscopic Surgery 场景下操纵手术器械。
4. 运行任务。
在 ARMLPEG 中,你可以运行任务并观察机器人控制器的表现。
ARMLPEG 会记录机器人控制器在任务中的表现,并将其用于训练机器人控制器。
5. 评估机器人控制器。
在 ARMLPEG 中,你可以使用评估函数来评估机器人控制器的表现。
评估函数通常包括机器人在任务空间中的得分,以及机器人在任务中的表现。
ARMLPEG 的使用方法非常简单,并且易于使用。
通过使用 ARMLPEG,你可以训练出一个优秀的机器人控制器,以优化机器人在 Laparoscopic Surgery 场景下的表现。
转帖第一章熟悉LPC的面板首先,熟悉一下LPC的面板!图1图2图3一、先说说独奏模式!老云最擅长!最常用的也是这个!其实独奏模式所能做的不仅仅是独奏!~不仅仅是旋律主音!节奏吉他也可以用他!我上传的工程文件里的节奏吉他也是在这个模式下制作的!它到底是独奏还是节奏是因你钢琴窗中的音符决定的!如果你钢琴窗里写的就是节奏吉他所弹奏的东西!那么它就是节奏!例如:图4音符已经组成了节奏吉他所需的东西!这就是在独奏模式下弹奏的节奏吉他!二、其他模式:其他的这些模式老云并不擅长!它们的一些优点!方便之处老云还没找到!~老云认为在其他模式里做节奏吉他,BASS等等!并不能诠释出这个乐器的技巧!~节奏吉他未必就没有主音的技巧!~所以!在这些模式下制作带技巧的节奏吉他,BASS等并不是很方便!一些喜欢制作简单的流行音乐,喜欢制作说唱的朋友们可以用这种功能来写节奏吉他!~因为在这些模式下!节奏吉他的弹奏基本不需要你去写音符!~比如你要写一个一六四五的和声!只需要在钢琴窗中写下一、六、四、五的主音音符!然后在这些模式下你就可以听到你想要的东西了!~当然,这些是不包含吉他技巧的!1.和声模式看看下面的图!看看我们可以选择什么样的模式播放写下来的一、六、四、五.图54度向下,5度向上,1八度,2八度,金属和弦1,金属和弦2,你动动手播放一下!听听看!有什么不同!最喜欢哪一个!2.和弦模式:图6这个模式下很有意思!注意一下这里罗马数字1234和KBD所代表的是吉他指板上的把位!弹吉他的同志们都应该有概念哈!罗马数字1的把位是最左端的一组!以此类推!KBD是keyboard的意思,键盘,这里指的是在整个吉他指板上弹奏!再来看一下这个“弦数”,这个表示的意思是你所选择弹奏和弦的弦!比如像现在的设置表示的意思就是在一弦和六弦之间弹奏和弦,如果上面的调成2就表示在二弦和六弦之间弹奏!结合弦数和把位!基本上你所需要弹奏的和弦横向和纵向位置就定下来了!其实这其中有很多不方便的地方!具体的大家自己体会吧!3.低音&和弦模式和弦把位就不多说了!跟上面的一样!这里要说的是“弦数”这里的“弦数”和和弦模式下的“弦数”是不一样的!这里的“弦数”表示低音的演奏弦!比如现在的设置是“4”那么演奏低音的弦就是4弦!你播放一下试试!~很快就明白了!~4.低音&拨片模式这里的东西自己试试吧!~其他模式小结:其实在这里还有一个会让一些不懂吉他的人非常高兴的一个功能!看过卖血过年前辈的关于REALGUITAR2的教程的朋友们都知道有一个按键是可以直接导入节奏型的!这里的REALLPC和REALSTRA T也有这个功能!红色圈的是选择节奏型。
league记忆方法作为一名职业写手,今天我将向大家介绍一种名为League的记忆方法。
League记忆方法是一种结合了多种记忆技巧的综合性记忆方法,旨在帮助人们更有效地记忆各种知识和信息。
在接下来的内容中,我们将详细阐述League记忆方法的原理、实践步骤、应用领域以及优势和注意事项。
首先,让我们了解一下League记忆方法的核心原理。
League记忆方法主要包括三种核心技巧:关联记忆法、遗忘曲线理论和记忆宫殿法。
关联记忆法是指通过将新学到的知识与已知的知识关联起来,从而加深对新知识的理解和记忆。
这种方法使得记忆更加生动有趣,有助于提高记忆效果。
遗忘曲线理论则是指人们在学习过程中,对新知识的遗忘速度是先快后慢的。
因此,合理设置复习时间节点,可以有效提高记忆的持久性。
记忆宫殿法是一种通过将知识点与熟悉的地点和物品关联,从而在脑海中形成一幅生动的记忆地图。
这种方法可以帮助我们轻松记忆大量信息,并在需要时快速检索。
接下来,我们将介绍如何在实际生活中运用League记忆方法。
首先,确定记忆目标,明确需要记忆的内容。
其次,创建记忆宫殿,选择一个自己熟悉的地点,例如家、学校或办公室。
然后,设计记忆关联,将需要记忆的内容与记忆宫殿中的地点和物品关联。
最后,根据遗忘曲线进行复习与巩固。
League记忆法不仅在学术领域表现出强大的威力,还能应用于日常生活和工作。
例如,在学习语言时,可以通过关联记忆法将新词汇与生活中的实际场景关联,从而轻松记住词汇和其用法;在需要记忆数字和公式时,可以将它们与记忆宫殿中的特定物品关联,便于快速检索和理解。
League记忆法的优势和优点显而易见。
首先,它提高了记忆效率,使人们在相同时间内能记住更多的信息。
其次,通过关联记忆法和记忆宫殿法,League记忆法能够帮助人们长期记住重要的知识和信息。
此外,League记忆法有趣且易于接受,使得学习过程更加愉悦。
最后,它适用于各年龄段,无论是学生还是职场人士,都可以从中受益。
lel 工作原理【原创版】目录一、lel 的工作原理概述二、lel 的组成部分三、lel 的工作流程四、lel 的应用领域正文一、lel 的工作原理概述lel,全称为“语言增强学习”,是一种基于人工智能技术的自然语言处理方法。
其核心思想是通过对大量文本数据的学习和分析,提高计算机对自然语言的理解能力,从而更好地进行文本生成、分类、翻译等任务。
与传统的机器学习方法相比,lel 具有更强的自适应性和泛化能力,能够有效处理复杂的语言现象,提升自然语言处理的效果。
二、lel 的组成部分1.神经网络:lel 采用深度神经网络作为基本模型,通过多层神经元的组合实现对输入数据的表示和映射。
常用的神经网络结构有循环神经网络(RNN)、长短时记忆网络(LSTM)和门控循环单元(GRU)等。
2.损失函数:损失函数用于衡量模型预测结果与实际标签之间的差距,是模型训练过程中优化的目标。
常见的损失函数有交叉熵损失、均方误差损失等。
3.优化器:优化器用于在模型训练过程中更新模型参数,以使损失函数最小化。
常用的优化器有随机梯度下降(SGD)、Adam 等。
4.预处理模块:预处理模块负责对输入文本数据进行清洗、分词、词干提取等操作,以便于神经网络进行有效的学习和推理。
三、lel 的工作流程1.数据预处理:将原始文本数据进行清洗、分词、词干提取等操作,得到预处理后的文本序列。
2.序列建模:利用神经网络对预处理后的文本序列进行建模,学习文本序列中的语言规律和结构信息。
3.模型训练:根据损失函数,通过反向传播算法更新模型参数,使模型在训练数据上的损失函数值不断减小。
4.模型评估:使用验证集或测试集评估模型的性能,包括准确率、召回率、F1 值等指标。
5.模型调优:根据评估结果,调整模型结构、损失函数或优化器等参数,以提高模型性能。
四、lel 的应用领域1.文本分类:lel 可以用于对文本数据进行分类,例如新闻分类、情感分析等。
2.机器翻译:lel 可以用于实现机器翻译,例如将中文翻译成英文,或英文翻译成中文等。
Ragel学习笔记
解决的问题
采用一个连续的可能庞大的正则表达式,可以有一些分块式action,或者只是判断某一串符合此表达式。
采用解决问题模型为有限状态机。
语法
嵌入C, C++, Objective-C, D, Go,Java and Ruby.
多行代码
%%{
… …
}%%
单行代码%%
实例代码
#include <string.h>
#include <stdio.h>
%%{
machine foo;
main :=
( 'foo' | 'bar' )
0 @{ res = 1; };
}%%
%% write data;
int main( int argc, char **argv )
{
int cs, res = 0;
if ( argc > 1 ) {
char *p = argv[1];
char *pe = p + strlen(p) + 1;
%% write init;
%% write exec;
}
printf("result = %i\n", res );
return 0;
}
状态机名
machine fsm_name;
必须在块开头注明,如上例。
如果没注明则用先前使用的,如没有则报错。
可以采用多文件编译include为关键字导入文件。
定义语句
<name> = <expression>;
名为name的state直到定义实例化(被引用时(下一个为:=形式))才生成,该语句类似一个类的定义
状态机实例化
<name> := <expression>;
该语句产生状态机的一个状态,名为main的状态为初始start状态。
%% write init // 该命令设置cs (current_state) 为main的状态,即为start状态
如果没有main 则最近一个实例化的状态即为开始状态。
在外部执行控制语句可以通过设置cs来设置状态机,内部执行,采用fcall fgoto fnext实现状态切换。
导入ragel代码
include FsmName "inputfile.rl";
如果没名会与当前状态机同名,如果没输入文件,则导入FsmName,检索路径与当前文件相同,可以通过-I命令增加include 检索路径,同makefile。
导入定义
import "inputfile.h";
文件内容形如:(单引号类似命令标记)定义name 为number(纯数字) 或者lit_string(字符串)
name '=' number
name '=' lit_string
'define' name number
'define' name lit_string
如果输入文件为一个ragel 程序则忽略所有tokens,检索路径与当前文件相同,可以通过-I 命令增加import检索路径,同include。
Ragel块解析词典语法规则
(1) # 单行注释
(2) “” …‟ // [],四种符号作为语句分隔符,在其中\0 \a \b \t \n \v \f \r字符可以被读取,/ 反斜杠为转移字符,例如出现在行尾则表示连接下一行,正则表达式中作为转移字符或者终止符。
也有一些不支持的操作符。
(3) {} 主代码中表示一个action,代码拷贝,类似于inline
(4) [+-]?[0-9]+ 表示一个可以有符号的十进制整数。
0x[0-9A-Fa-f]+表示十六进制整数
(5) 关键词access, action, alphtype, getkey, write, machine and include.
(6) [a-zA-Z_][a-zA-Z_0-9]*标示符:字母或者_开头
(7) 空格作为代码间分隔符(not a state)
状态机ABC
(1) …hello‟ 串联状态机h to o 5个字符作为开始到结束6种状态的转换
(2) “hello” 同上
(3) [hello] 或语句同正则表达式hello五个字符中任意一个。
[^H]表示非H的字符
(4) 42 一个状态转变,short的-32768-32767
(5) /simple_regex/ 正则表达式,其中any代表.或者[]的集合,[a-z]*是有意义的。
/GET/i表示GET大小写不敏感正则表达式。
表达式是不能太复杂
/ab*[c-z].*[123]/状态机如下,其中DEF代表对应的状态转移因子。
(6) builtin_machine
定义如下二元状态的内置状态变量。
---- any ---- Any character in the alphabet.
---- ascii ---- Ascii characters. 0..127
---- extend ---- Ascii extended characters. This is the range -128..127 for signed alphabets
and the range 0..255 for unsigned alphabets.
---- alpha ---- Alphabetic characters. [A-Za-z]
---- digit ---- Digits. [0-9]
---- alnum ---- Alpha numerics. [0-9A-Za-z]
---- lower ---- Lowercase characters. [a-z]
---- upper ---- Uppercase characters. [A-Z]
---- xdigit ---- Hexadecimal digits. [0-9A-Fa-f]
---- cntrl ---- Control characters. 0..31
---- graph ---- Graphical characters. [!-~]
---- print ---- Printable characters. [ -~]
---- punct ---- Punctuation. Graphical characters that are not alphanumerics. [!-/:-@[-`-----~] ---- space ---- Whitespace. [\t\v\f\n\r ]
---- zlen ---- Zero length string. ""
---- empty ---- Empty set. Matches nothing. ^any
优先级
集合
(1)expr|expr
(2) expr&expr
(3) expr-expr
(4) expr--expr
这一语句与expr-(any*expr any*)作用相同,expr代表某一语句(5)expr.expr
main := /[^\n]*\n/* . 'EOF\n';。
…。
命令
-V: 可视化
-S –M 检查
-X 编译状态机为xml格式User Actions
action ActionName {
/* Code an action here. */ count += 1;
}
Enter action expr>action
Finishing action expr@action
All transition action Main:=(…m1‟|…m2‟)$A
Leaving action
Expr%action。