极限学习机
- 格式:docx
- 大小:898.33 KB
- 文档页数:9
1 极限学习机传统前馈神经网络采用梯度下降的迭代算法去调整权重参数,具有明显的缺陷:1)学习速度缓慢,从而计算时间代价增大;2)学习率难以确定且易陷入局部最小值;3)易出现过度训练,引起泛化性能下降。
这些缺陷成为制约使用迭代算法的前馈神经网络的广泛应用的瓶颈。
针对这些问题,huang等依据摩尔-彭罗斯(MP)广义逆矩阵理论提出了极限学习(ELM)算法,该算法仅通过一步计算即可解析求出学习网络的输出权值,同迭代算法相比,极限学习机极大地提高了网络的泛化能力和学习速度。
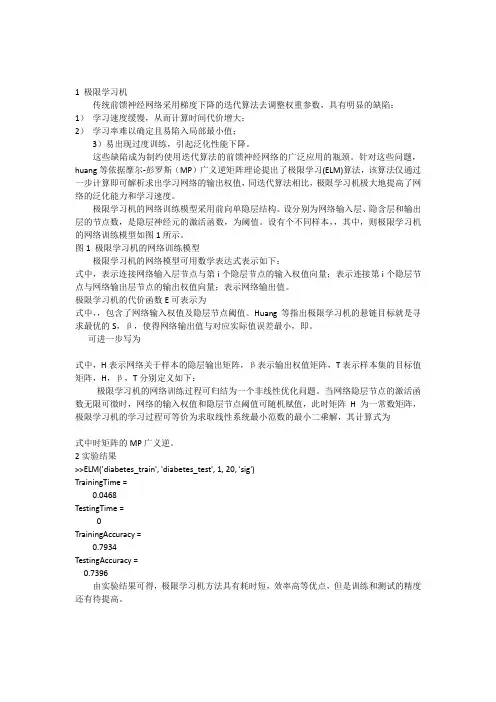
极限学习机的网络训练模型采用前向单隐层结构。
设分别为网络输入层、隐含层和输出层的节点数,是隐层神经元的激活函数,为阈值。
设有个不同样本,,其中,则极限学习机的网络训练模型如图1所示。
图1 极限学习机的网络训练模型极限学习机的网络模型可用数学表达式表示如下:式中,表示连接网络输入层节点与第i个隐层节点的输入权值向量;表示连接第i个隐层节点与网络输出层节点的输出权值向量;表示网络输出值。
极限学习机的代价函数E可表示为式中,,包含了网络输入权值及隐层节点阈值。
Huang等指出极限学习机的悬链目标就是寻求最优的S,β,使得网络输出值与对应实际值误差最小,即。
可进一步写为式中,H表示网络关于样本的隐层输出矩阵,β表示输出权值矩阵,T表示样本集的目标值矩阵,H,β,T分别定义如下:极限学习机的网络训练过程可归结为一个非线性优化问题。
当网络隐层节点的激活函数无限可微时,网络的输入权值和隐层节点阈值可随机赋值,此时矩阵H为一常数矩阵,极限学习机的学习过程可等价为求取线性系统最小范数的最小二乘解,其计算式为式中时矩阵的MP广义逆。
2实验结果>>ELM('diabetes_train', 'diabetes_test', 1, 20, 'sig')TrainingTime =0.0468TestingTime =TrainingAccuracy =0.7934TestingAccuracy =0.7396由实验结果可得,极限学习机方法具有耗时短,效率高等优点,但是训练和测试的精度还有待提高。

极限学习机理论与应用研究在深度学习领域中,神经网络一直是一个热门话题。
然而,神经网络不仅复杂而且计算密集,因此新的机器学习算法也不断涌现,希望取代这种方法。
极限学习机是这样一种算法,它有效地解决了传统神经网络所面临的问题。
本文将深入介绍极限学习机的理论和应用研究。
一、极限学习机的概念极限学习机是一种快速的单层前馈神经网络,符合大数据环境下高效率和高精度的要求。
与传统的神经网络不同,极限学习机模型不涉及网络层中权值的调节,因此更容易使用。
这个模型常常简称为ELM。
它的训练方式是在网络学习过程中,只调整输入层和输出层之间的链接权重和偏差。
与其他的神经网络相比,极限学习机有以下优点:1. 快速:传统神经网络通常需要使用反向传播算法训练,这个过程非常耗时。
在性能要求的情况下,ELM的训练速度更快。
2. 简单:ELM的参数只包括输入层和输出层之间的链接权重和偏差。
这使得神经网络的设计和实现更加容易。
3. 鲁棒性:ELM对于权重和偏差的初始值并不敏感,也就是说,它可以在初始权重和偏差值上取得很好的效果。
4. 高精度:在处理大量数据的时候,ELM的精度相当高。
二、极限学习机的原理在ELM中,输入层与神经元之间的连接权重是随机初始化的,然后通过解方程组来确定输出层与神经元之间的连接权重。
这个过程被称为“随机稠密映射(Random Projection)”。
随机稠密映射通常可以被看做是一种优秀的特征提取器。
在ELM的训练过程中,首先要将样本输入层的输入值x通过一个由与节点神经元个数相同的系数矩阵Omega和偏置项b组成的线性变换$H = g(x\Omega+b)$中映射到隐藏层,其中g是一个激活函数。
公式中的随机矩阵Omega是样本输入层和输出层之间的链接权重。
目标是找到输入矩阵X和标签矩阵Y之间的连接权重W,使预测值P与真实值T的误差最小化:$P=H W$$minimize \quad \frac{1}{2} ||Y-P||^2_F$其中||·||_F 是矩阵F范数选择逆矩阵(Inv)方法,将权重$W = H^+ Y$公式中,H⁺是矩阵H的Moore-Penrose伪逆。

极限学习机在预测和优化中的应用极限学习机是一种新型的人工神经网络算法,它能够快速训练出高度精确的预测模型,是目前比较流行的机器学习算法之一。
由于极限学习机在预测和优化领域中的独特性,它广泛地被应用于各种领域,如金融预测、医药研究、图像识别、机器人等。
本文将介绍极限学习机在预测和优化中的应用,并探讨它的优缺点。
一、极限学习机简介极限学习机(Extreme Learning Machine,ELM)是一种基于单层前向神经网络结构的机器学习算法。
它主要有两个步骤:首先随机生成神经元的权值和偏置,然后通过激活函数将输入值映射到神经元的输出值,最后将输出值作为预测结果。
相比于传统人工神经网络模型,ELM具有快速收敛、低存储和计算成本等优势。
二、ELM在预测中的应用1. 金融预测金融预测一直是经济学家和投资者关注的重点。
通过对历史数据的分析,可以预测未来的市场趋势和股价涨跌。
ELM在金融预测领域已经被广泛应用。
例如,通过ELM可以预测股票的收盘价、期货的价格等等。
ELM在金融预测领域的应用,有效地提高了数据的处理效率和预测精度,帮助投资者做出更稳健的投资决策。
2. 医药研究医药研究是一个长期且高风险的过程。
通过对大量的药物试验数据进行分析,可以挖掘出药物的性质和作用。
ELM在药物研究中的应用,可以有效地预测药物的活性和毒性,并优化药物设计过程。
例如,通过ELM可以预测药物对人类细胞的毒性,从而降低药品的副作用。
三、ELM在优化中的应用1. 图像处理图像处理是一个需要大量计算的领域。
通过ELM可以有效地处理和优化图像,减少计算时间和能源消耗。
例如,通过ELM可以快速地识别图像中的物体,从而更好地理解图像内容。
2. 机器人控制机器人控制需要高度精准的指令和反馈,以实时控制机器人的运动。
通过ELM可以实现机器人的自主控制和优化,避免机器人的运动出现偏差和错误。
四、ELM的优缺点ELM相比于传统的神经网络算法具有以下优点:1. ELM可以在一个较短的时间内进行训练,而不需要进行大量的迭代,可以快速地处理海量数据。
基于极限学习机的数据分类方法研究数据分类作为一种重要的数据挖掘技术,已经被广泛应用于各个领域。
而在数据分类中,分类模型的选择将直接关系到分类的准确性和效率。
在此基础上,本文将介绍一种新颖的基于极限学习机的数据分类方法,探讨其理论原理和应用前景。
一、背景概述在数据分类中,传统的机器学习算法如SVM、KNN等已经被逐渐淘汰。
而以神经网络为代表的深度学习算法,虽然在分类准确性上表现出色,但其训练过程非常复杂,需要大量的计算资源和时间。
因此,极限学习机(ELM)作为一种新型的快速学习方法,备受研究者的关注。
ELM是由黄广省博士于2006年提出的一种单隐层前馈神经网络模型。
其主要特点是采用随机初始化神经元的权重和偏置,然后直接获取最小二乘解以避免传统神经网络中的时间和空间消耗问题。
由于其快速的学习速度和优异的性能,ELM 在图像识别、文本分类、生物医药等领域得到了广泛的应用。
二、极限学习机的基本理论1. ELM的网络结构ELM网络由三个层组成,分别为输入层、隐层和输出层。
其中,输入层接收原始数据,隐层负责提取特征向量,输出层则进行分类。
2. ELM的优化目标ELM通过最小化随机初始化的权重和偏置的最小二乘解来优化模型,以达到分类正确率最高的效果。
3. ELM的分类方法ELM将输入数据映射到隐层,从而得到特征向量,然后再将特征向量与权重矩阵进行乘积运算得到输出结果。
最后,输出结果经过sigmoid函数处理,得到最终的分类结果。
三、基于ELM的数据分类方法基于ELM的数据分类方法包括以下几个步骤:1. 数据预处理数据预处理是分类的前置工作,主要包括数据清洗、降维和标准化等操作。
其中,数据清洗可以去除数据中的异常值和缺失值,降维可以减少特征向量的维度,标准化可以使数据的分布更加均匀。
2. 配置ELM模型ELM模型的配置包括隐层神经元的选择、激活函数的选择等。
其中,隐层神经元的选择需要根据实际情况确定,通常需要进行交叉验证来确定最优的隐层神经元数量。
ELM极限学习机算法源码一、极限学习机(ELM)算法概述极限学习机(ELM)是一种机器学习方法,由乔明·埃德尔霍尔斯(Gao Ming)博士发明。
该方法利用随机权重的网络结构,能够更快速的训练深层神经网络,并减少需要调整的参数。
具体来说,ELM可以用于定义输入和输出之间的非线性回归/分类函数,以及进行数据挖掘和逻辑回归,实现优化和计算机视觉等方面的研究。
二、ELM算法源码实现1.导入相关库并定义函数import numpy as npimport matplotlib.pyplot as plt#定义sigmoid函数def sigmoid(x):return 1 / (1 + np.exp(-x))2.读取数据并处理:#读取数据x = np.loadtxt('data.txt', delimiter=',', dtype='float32', skiprows=1)X=x[:,:-1]y = x[:, -1][:, np.newaxis]#添加偏置项,让数据集变为更合适的格式X = np.hstack([np.ones_like(X, dtype='float32'), X]) 3.训练模型#初始化ELM网络参数input_nodes = X.shape[1]hidden_nodes = 6output_nodes = 1#随机生成权重和偏置W = np.random.normal(size=(input_nodes, hidden_nodes)) b = np.zeros((1, hidden_nodes))# 将输入数据和随机生成的权重输入sigmoid函数H = sigmoid(np.dot(X, W) + b)#计算输出层参数beta = np.dot(np.linalg.pinv(H), y)4.预测#计算预测值y_pred = np.dot(H, beta)#画出预测结果和样本数据plt.scatter(X[:,1], y, label='Real data')plt.plot(X[:,1], y_pred, label='Predicted data') plt.title('ELM')plt.xlabel('Input')plt.ylabel('Output')plt.legenplt.。
MKXZ工具与方法基本工作手册MKXZ(Multiple Kernelized Extreme Learning Machine)是一种基于多核极限学习机的机器学习方法,它可以用于解决多类别分类和回归问题。
本文将介绍MKXZ工具与方法的基本工作手册,包括算法原理、使用方法和实例分析等内容。
一、算法原理1.1 多核极限学习机(MKELM)简介多核极限学习机是一种基于极限学习机(ELM)的机器学习方法,它主要使用随机生成的隐藏层权重和偏置来建立神经网络模型。
MKELM通过使用多个核函数来提高模型的学习能力和泛化能力。
1.2 多核化的极限学习机(MKXELM)简介多核化的极限学习机是在MKELM的基础上发展而来的方法,它通过将样本数据映射到高维空间中,然后在高维空间中进行学习和分类。
MKXELM通过使用多个核函数和核权重来融合不同的核特征,并构建高性能的分类模型。
1.3 MKXZ(Multiple Kernelized Extreme Learning Machine)简介MKXZ是一种基于MKXELM的机器学习方法,它通过使用多个核函数和核矩阵来构建高性能的分类模型。
MKXZ在MKELM的基础上引入了正则化项和粒子群优化算法,可以进一步提高模型的泛化性能和稳定性。
二、使用方法2.1 数据预处理首先,需要对原始数据进行预处理,包括数据清洗、特征选择、数据缩放等步骤。
可以使用pandas和numpy等库来进行数据处理,确保数据的准确性和一致性。
2.2 模型初始化在使用MKXZ之前,需要初始化模型的参数,包括隐藏层节点数、核函数类型、正则化系数等。
可以使用sklearn库中的ELMRegressor和ELMClassifier来初始化模型,并选择合适的参数。
2.3 数据划分将预处理后的数据划分为训练集和测试集,通常使用交叉验证的方式来划分数据集。
可以使用sklearn库中的train_test_split函数来随机划分数据集,并设置训练集和测试集的比例。
基于极限学习机的自适应控制技术研究随着科技的发展,人工智能技术已经不再是一个遥远的概念,它们正在迅速地改变着人们的生活和工作方式。
在自动控制领域中,自适应控制算法通常被用来帮助机器自主学习和掌握知识。
其中,极限学习机算法在自适应控制领域中拥有重要的地位,因为它具有简单快速、高效、实用等特点,在实际应用中十分广泛。
一、极限学习机极限学习机(Extreme learning machine,简称ELM)是一种新型的人工神经网络算法,它由中国科学家黄广东于2006年提出。
与传统的神经网络算法不同,ELM算法不需要对参数进行调整并且具有快速的训练速度和良好的泛化能力。
ELM算法通过随机化的方式将一组输入数据映射到隐层神经节点,然后再将映射到隐层节点后的结果线性组合,得到最终输出结果。
这种随机化的处理方式使ELM算法可以避免传统神经网络算法中的局部最小值问题以及过拟合问题,同时也使得ELM算法的训练速度更快,理论上达到O(n)的复杂度。
二、自适应控制算法在自动化控制中,自适应控制算法是指系统可以自主地学习和控制自身,根据不同的环境和情景来自动调整和控制输出参数。
它是一种高级的自动控制算法,可以应用于各种自动化控制领域,实现系统的智能化和自主化。
自适应控制算法的核心思想是在实时环境下,通过对系统的输入和输出进行监测和反馈来动态地控制和调整控制参数,使得系统在不断变化的环境下能够始终保持最佳的工作状态。
自适应控制算法通常由多种算法和策略组合而成,包括但不限于PID控制算法、模型参考自适应控制算法、预测控制算法等。
三、基于ELM的自适应控制技术在自适应控制领域中,ELM算法可以应用于许多实际问题的解决,例如控制系统的建模、参数估计、状态检测和故障诊断等。
基于ELM的自适应控制技术可以有效地提高控制系统的效率和准确度,并且具有很好的适应性和稳定性。
一种常见的基于ELM的自适应控制技术是基于模型参考自适应控制算法。
基于极限学习机的机械设备故障诊断研究一、引言随着工业化进程的不断推进,机械设备在生产中起到至关重要的作用。
机械设备的故障一直是生产过程中的一大难题,严重影响着生产效率和质量。
对机械设备故障进行及时、准确的诊断,具有重要的意义。
近年来,随着人工智能技术的发展,基于极限学习机的机械设备故障诊断研究成为热点问题之一。
本文将从极限学习机的基本原理出发,探讨其在机械设备故障诊断中的应用研究。
二、极限学习机的基本原理极限学习机(Extreme Learning Machine, ELM)是一种新型的人工神经网络模型,由黄洪成等人于2006年首次提出。
相对于传统的神经网络模型,ELM具有训练速度快、泛化能力强等优点。
其基本原理是通过随机生成输入层到隐含层的连接权重和隐含层到输出层的连接权重,然后通过解析解的方法,直接计算输出层的权重,避免了传统神经网络需要迭代训练的缺点。
这使得ELM在大规模数据下能够快速高效地进行训练和预测。
三、基于极限学习机的机械设备故障诊断模型在机械设备故障诊断中,通常需要从大量的传感器数据中提取特征来进行故障诊断。
传统的机械设备故障诊断模型往往需要手动选取特征,在特征提取和选择上存在着一定的局限性。
而基于极限学习机的机械设备故障诊断模型,可以克服传统模型在特征提取上的不足。
其基本思路是直接利用原始的传感器数据作为输入,通过ELM模型学习数据的内在规律,快速准确地诊断出机械设备的故障。
四、实验研究为了验证基于极限学习机的机械设备故障诊断模型的有效性,本文进行了一系列的实验研究。
我们采集了一台工业设备在正常运行和故障状态下的传感器数据,包括振动、温度、压力等多个方面的数据。
然后,将原始数据输入到基于极限学习机的故障诊断模型中进行训练。
通过对比实际故障情况和模型诊断结果,验证了模型的准确性和可靠性。
实验结果表明,基于极限学习机的机械设备故障诊断模型具有较高的准确率和鲁棒性。
相比传统的机械设备故障诊断方法,基于ELM的模型可以更好地适应不同的故障情况,并且具有更快的诊断速度。
1 极限学习机传统前馈神经网络采用梯度下降的迭代算法去调整权重参数,具有明显的缺陷:1)学习速度缓慢,从而计算时间代价增大;2)学习率难以确定且易陷入局部最小值;3)易出现过度训练,引起泛化性能下降。
这些缺陷成为制约使用迭代算法的前馈神经网络的广泛应用的瓶颈。
针对这些问题,huang等依据摩尔-彭罗斯(MP)广义逆矩阵理论提出了极限学习(ELM)算法,该算法仅通过一步计算即可解析求出学习网络的输出权值,同迭代算法相比,极限学习机极大地提高了网络的泛化能力和学习速度。
极限学习机的网络训练模型采用前向单隐层结构。
设分别为网络输入层、隐含层和输出层的节点数,是隐层神经元的激活函数,为阈值。
设有个不同样本,,其中,则极限学习机的网络训练模型如图1所示。
图1 极限学习机的网络训练模型极限学习机的网络模型可用数学表达式表示如下:式中,表示连接网络输入层节点与第i个隐层节点的输入权值向量;表示连接第i个隐层节点与网络输出层节点的输出权值向量;表示网络输出值。
极限学习机的代价函数E可表示为式中,,包含了网络输入权值及隐层节点阈值。
Huang等指出极限学习机的悬链目标就是寻求最优的S,β,使得网络输出值与对应实际值误差最小,即。
可进一步写为式中,H表示网络关于样本的隐层输出矩阵,β表示输出权值矩阵,T表示样本集的目标值矩阵,H,β,T分别定义如下:极限学习机的网络训练过程可归结为一个非线性优化问题。
当网络隐层节点的激活函数无限可微时,网络的输入权值和隐层节点阈值可随机赋值,此时矩阵H为一常数矩阵,极限学习机的学习过程可等价为求取线性系统最小范数的最小二乘解,其计算式为式中时矩阵的MP广义逆。
2实验结果>>ELM('diabetes_train', 'diabetes_test', 1, 20, 'sig')TrainingTime =0.0468TestingTime =TrainingAccuracy =0.7934TestingAccuracy =0.7396由实验结果可得,极限学习机方法具有耗时短,效率高等优点,但是训练和测试的精度还有待提高。
基于深度学习的极限学习机算法研究深度学习是当前人工智能领域研究的重点之一,极限学习机(Extreme Learning Machine,ELM)作为一种新型的学习算法,在深度学习领域也备受关注。
本文将围绕基于深度学习的极限学习机算法进行研究。
一、深度学习和极限学习机简介深度学习是一种基于人工神经网络的机器学习算法,它通过多层“神经元”对数据进行分类和预测。
深度学习的优势在于对于大量复杂数据的处理和分析能力,例如图像识别、语音识别等。
深度学习的一个缺陷是需要大量的数据和计算资源进行训练,过程复杂而漫长。
极限学习机(ELM)是一种新型的学习算法,它在传统的神经网络算法基础上增加了随机隐藏层和线性输出层。
ELM学习的核心是随机产生隐藏层的初始权重和偏置,以最小化输出误差。
相较于传统的神经网络算法,ELM的学习速度快,对参数调整的敏感度低,更适合处理大规模的数据。
二、基于深度学习的极限学习机算法(一)极限学习机算法的特点在深度学习领域中,ELM算法被称作“浅层神经网络”,与深度学习中的多层神经网络相比,它使用较少的隐藏层并快速生成简单的结果。
此外,ELM算法在神经网络的训练过程中是闭式解,因此训练速度快,计算资源占用少。
ELM算法的核心思想是建立随机权重的隐藏层和线性输出层,通过最小化误差来调整权重。
与传统的神经网络算法相比,ELM算法不需要对隐藏层进行预训练,因此具有更高的训练速度和更少的参数需要调整。
此外,ELM算法在维度灾难问题上具有很好的处理能力,可以在高维数据场景中进行分类和预测。
(二)基于深度学习的ELM算法流程在基于深度学习的ELM算法中,数据集首先需要被输入到一个深度学习的多层神经网络中。
这个多层神经网络需要进行训练,以得到合适的各层神经元的权重和偏置,使得网络的输出最符合数据集的预测。
一旦多层神经网络得到训练,它的前K个隐藏层中的神经元就能够用作ELM 算法的输入层。
这些神经元将原始数据分配到对应的随机初始权重和偏置的隐藏层上,并计算出输出结果。
基于极限学习机的机器人类人运动轨迹控制方法研究机器人类人运动轨迹控制是机器人控制领域中的一个重要研究方向,极限学习机(Extreme Learning Machine,简称ELM)是一种新型的机器学习算法,具有训练速度快、泛化能力强等优点。
本文将基于极限学习机,研究机器人类人运动轨迹控制方法。
首先,我们需要了解机器人类人运动轨迹控制的背景。
机器人类人运动轨迹控制是指通过控制机器人的关节或身体部件运动,使机器人的动作尽可能逼近人类运动的特点。
这一技术应用于机器人仿真和实物机器人的控制中,可以使机器人的运动更加具有人类的特点,提高机器人的社交、协作和服务能力。
接下来,我们将介绍极限学习机的基本原理和特点。
极限学习机是一种单隐层前向神经网络模型,在训练过程中只有输出权重需要被调整,隐层神经元的权重不需要调整。
这一特点使得ELM具有训练速度快的优势,可以有效地处理大规模训练数据。
此外,ELM还具有良好的泛化能力,可以在面对未知数据时取得较好的性能。
在机器人类人运动轨迹控制中,我们可以将控制问题视为一个回归问题,即通过给定的输入数据,预测机器人的运动轨迹。
ELM可以用来训练这一回归模型,将机器人的输入特征与运动轨迹之间的映射关系进行学习。
接着,我们可以使用ELM进行机器人运动轨迹控制模型的训练。
在ELM的训练过程中,随机初始化输入层与隐层之间的权重和偏置,然后利用训练数据集进行训练。
具体来说,首先计算隐层神经元的输出,然后利用最小二乘法求解输出权重。
训练完成后,我们就可以得到一个机器人运动轨迹控制模型。
最后,我们可以使用训练好的ELM模型进行机器人运动轨迹控制。
给定机器人的输入特征,通过ELM模型预测机器人的运动轨迹。
可以通过控制机器人的关节或身体部件运动实现预测的轨迹。
总之,基于极限学习机的机器人类人运动轨迹控制方法可以通过训练一个回归模型,实现对机器人运动的控制。
这一方法具有训练速度快、泛化能力强的优点,可以应用于机器人仿真和实物机器人的控制中,提高机器人的运动表现和交互能力。
基于隐特征空间的极限学习机模型选择随着数据规模的不断增加和人工智能的逐渐普及,机器学习技术的发展越来越迅速。
然而,在许多实际应用场景中,需要构建的模型过于庞大或者拥有复杂的结构,从而使得运行时间急剧上升,而在现实应用中更多考虑的是时间和理论运算效率。
因此,开发出一种允许快速且准确地构造机器学习模型的方法和算法显得尤为重要,这也就是到允许基于隐特征空间的极限学习机模型选择是如此的重要。
极限学习机是一种新近提出的监督式学习算法,可以高效地训练大规模数据集。
该算法可以使人们在减少模型计算时间的同时能够提高模型的准确性和泛化能力,从而很好地解决了机器学习过程中遇到的问题。
极限学习机使用一种基于隐特征空间的方法,先对原始输入特征进行非线性转换,将复杂的输入映射到高维隐空间中,再通过线性的方式学习隐层特征的权重,从而完成最终模型的训练过程。
采用这种方法的好处在于,所有的计算都是稠密的,可以通过并行化技术在多处理器上高效实现计算。
此外,这一方法还具有很好的泛化能力和鲁棒性,可以适用于许多不同的实际应用场景。
基于隐特征空间的模型选择方法,采用了一种全新的思想,它将原始特征与在隐式特征空间上训练的一组新特征相结合,来完成分类任务。
这种方法建立了更高效的机器学习模型,并提高了准确性。
具体实现方法是在不同的隐特征空间中训练多个极限学习机,并使用交叉验证技术选择最佳的模型。
通过这样的方式,可以极大地减少运行时间,提高模型精度和鲁棒性。
在实际应用中,基于隐特征空间的模型选择方法已广泛应用于不同的领域,包括图像分类、语音识别和信号处理等。
这些领域的数据都具有复杂性,而且数据集规模非常大,所以使用传统的机器学习算法往往会受到限制。
与此相反,采用基于隐特征空间的极限学习机模型选择方法可以帮助我们快速地构建出高性能、高精度的模型,使得模型得以适应对各种不同的复杂数据集,也使得模型更容易被训练。
总之,基于隐特征空间的极限学习机模型选择是一种有效的机器学习技术,可以快速地构建出复杂的模型并提高模型的泛化能力和鲁棒性。
《基于极限学习机的风机机械传动部件剩余寿命预测研究》篇一一、引言风机是能源生产和消费过程中重要的机械设备之一,广泛应用于电力、矿产和水利等多个领域。
在风机设备中,机械传动部件起着关键的作用,但受环境因素和操作压力等影响,这些部件容易出现故障和损坏,严重影响风机的运行效率。
因此,如何有效地预测风机机械传动部件的剩余寿命成为当前研究的重要问题。
传统的寿命预测方法存在很多局限,比如无法对非线性和动态的系统进行有效建模和预测。
为此,本研究引入极限学习机算法(ELM)作为关键工具,以实现对风机机械传动部件的剩余寿命进行预测。
二、极限学习机算法(ELM)极限学习机(ELM)是一种基于神经网络的机器学习算法,具有学习速度快、泛化能力强等优点。
ELM算法通过在训练过程中随机生成输入权重和偏置项,然后利用最小二乘法求解输出权重,避免了传统神经网络算法中需要迭代调整的问题。
此外,ELM算法对于特征数据的分布和维度要求不高,具有良好的适应性。
三、基于ELM的风机机械传动部件剩余寿命预测模型在预测风机机械传动部件的剩余寿命时,我们首先需要对设备的历史运行数据进行收集和处理,包括设备的运行时间、负载情况、温度、振动等数据。
然后,我们利用ELM算法建立预测模型。
具体步骤如下:1. 数据预处理:对收集到的数据进行清洗和预处理,包括去除噪声、填补缺失值等操作。
2. 特征提取:从预处理后的数据中提取出对剩余寿命预测有用的特征信息。
3. 模型建立:利用ELM算法建立基于提取的特征的预测模型。
4. 模型训练:利用历史数据对模型进行训练,优化模型的参数。
5. 剩余寿命预测:根据当前设备状态数据和训练好的模型进行剩余寿命预测。
四、实验与分析我们使用实际的风机机械传动部件的运营数据对上述模型进行了验证。
通过对比实际运行数据和模型预测数据,我们发现基于ELM的剩余寿命预测模型具有较高的准确性和可靠性。
同时,我们还通过与其他机器学习算法进行对比分析,验证了ELM算法在风机机械传动部件剩余寿命预测中的优越性。
1 介绍我们在这提出一个基于在线极限学习机和案例推理的混合预测系统。
人工神经网络(ANN)被认为是最强大和普遍的预测器,广泛的应用于诸如模式识别、拟合、分类、决策和预测等领域。
它已经被证明在解决复杂的问题上是非常有效的。
然而,神经网络不像其他学习策略,如决策树技术,不太常用于实际数据挖掘的问题,特别是在工业生产中,如软测量技术。
这是部分由于神经网络的“黑盒”的缺点,神经网络没能力来解释自己的推理过程和推理依据,不能向用户提出必要的询问,而且当数据不充分的时候,神经网络就无法进行工作。
所以需要神经网络和其他智能算法结合,弥补这个缺点。
案例推理的基本思想是:相似的问题有相似的解(类似的问题也有类似的解决方案)。
经验存储在案例中,存储的案例通常包括了问题的描述部分和解决方案部分;在解决一个新问题时,把新问题的描述呈现给CBR系统,系统按照类似案件与类似的问题描述来检索。
系统提交最类似的经验(解决方案部分),然后重用来解决新的问题。
CBR经过二十多年的发展,已经成为人工智能与专家系统的一种强有力的推理技术。
作为一种在缺乏系统模型而具有丰富经验场合下的问题求解方法,CBR系统在故障诊断、医疗卫生、设计规划集工业过程等大量依赖经验知识的领域取得了很大的成功。
但是由于案例属性权值的设定和更新问题,CBR 在复杂工业过程的建模与控制工作仍处于探索阶段,尤其对于预测回归问题,研究的更少。
不同于传统学习理论,2006年南洋理工大学Huang GB教授提出了一种新的前馈神经网络训练方法-极限学习机(ELM),能够快速的训练样本(比BP神经网络训练速度提高了数千倍),为在线学习和权值跟新奠定了基础。
我们提出的基于在线极限学习机的案例推理混合系统,能够使用案例来解释神经网络,用在线学习的方法为案例检索提供案例权值和更新案例权值,为在线预测某些工业生产提供了较好的模型。
2使用在线极限学习机训练特征权值的算法2.1 训练和更新样本特征权值(不是训练样本权值的,要记好,从新选择小题目)在这一节中我们提出如何使用在线极限学习机确定和更新案例库属性权值。
首先使用固定型极限学习机【】对给出的数据进行充分的训练,使训练的样本达到预期的误差范围内。
通过训练后的网络和数据集,我们确定初始案例库的特征权值集。
然后,当一个新的问题(案例)来查询时,我们可以根据基于训练特征权重的训练数据中找出K 个最相似的案例。
当然,OSELM 的预测结果也可以和最邻近的案例相比较。
这提供了扩展的信息数据库中查询与大多数类似的案件。
考虑到工业生产的连续性和耦合性,在这样的动态情况下,在线学习属性至关重要。
在线学习系统可以更新经验数据的特征属性权值,使系统更准确的预测当前工况,达到自然学习过程。
本文针对前期的生产状况进行特征权值初始化,即采用前一段的生产数据预测下一段时间的生产指标状况值。
基本思想如图2所示:设置窗口宽度为n,沿数据的时间轴滑动,依次预测下一段时间的生产数据。
极限学习机的数学模型如图2:o 输入层 隐藏层输出层ELM 的学习方法:给定任意N 个不同的样本{(,)}n m i j x t R R ∈⨯,隐层神经元数目L ,激励函数选择一个非常数的连续函数(,,)i i G a b x ,随机选取隐层参数,,1,2,...,i i a b i L =,ELM 可以以ε误差逼近任意的N 个样本,表示为:1(,,),1,...,Lj iiiijji O G a b x O -t j N βε==≤=∑,(1)其中,i a 是输入权值,i b 是隐层节点的阈值,i x 是输入向量,i β是第i 个隐层元和输出节点的连接权值,j O 是输出向量。
上式可以简化为H T β=,H 为隐层输出矩阵,其中:11,,T T T T L N L m N mt T t βββ⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1111111()(,,)(,,)()(,,)(,,)L L N N L L L N Lh x G a b x G a b x H h x G a b x G a b x ⨯⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦ 计算输出权值,H T H β++=是隐层输出矩阵的左伪逆矩阵。
考虑到生产过程的实际要求,由于生产的连续性,在这样的动态情况下,在线学习属性至关重要。
在线学习系统可以更新经验数据的特征属性权值,使系统更准确的预测当前工况,达到自然学习过程。
所以此次使用惯序性极限学习机,它具有固定极限学习机的训练速度,又有增量式极限学习机的泛化效率。
惯序性极限学习机的学习和训练过程不是一撮而就的,数据分批次给出,学习过程存在次序性。
任何时候,只有新的训练样本需要被学习,并调整权值。
训练过程不存在任何先验知识,只需要新的数据。
学习算法如下:第一步: 使用固定型极限学习机确定初始样本001{(,)}N i j i x t ψ==权值,使00H T β-最小,获取01000000,T TK H H K H H β-==; 第二步:当有一组新数据来到时,通过下面来更新权值:10101111()T +K H T H βββ-=-,其中1011T K K H H =+;若有1k +个新数据分批给出00111{(,)}N k i j N x t ψ+++=,则有: 111111111(),k k T k T k k k k k k k k K H T H K K H H βββ+-+++++++=+-=+ (3)其中:00000011111111111111(,,)(,,),(,,)(,,)k k TN N L L N k k T N k L L N k N k N L N mt G a b x G a b x H T G a b x G a b x t +++++++++++++⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(4)2 .2 案例推理(CBR )Shank 教授提出的基于案例推理CBR 属于机器学习领域的类比学习,即通过源问题与目标问题的相似性,查找目标问题的求解方法,其学习本身也是增量式的,可以解决非线性的半结构化或非结构化问题。
从典型的CBR 模型图3可以看出,案例的检索是CBR 周期的一个关键环节。
这一匹配过程的关键是案例间的相似性度量。
由于案例特征项的重要性各不相同,他们在相似度函数中因被设置为不同的值,各特征项权重直接影响着匹配的质量,所以各特征项权重应该提前设置好。
在过去的几十年人们对此提出了各种研究,其中K相邻法最受到人们的关注,最近邻法结合了领域知识,解释能力强,应用相对简单,多数CBR系统采用该算法,也取得了不错的应用效果(如EACH系统)。
K最近邻,就是k个最近的邻居的意思,说的是每个样本都可以用她最接近的k个邻居来代表。
KNN算法不仅可以用于分类,还可以用于回归。
通过找出一个样本的k个最近邻居,将这些邻居的属性的平均值赋给该样本,就可以得到该样本的属性。
更有用的方法是将不同距离的邻居对该样本产生的影响给予不同的权值(weight),如权值与距离成正比。
K-nearest neighbor(k-nn)分类,在训练集合中找到k个目标群体最接近测试目标。
2.3 计算案例检索的权值文献【A Hybrid Approach of Neural Network andMemory-Based Learning to Data Mining 可以换掉】曾提出BP 神经网络来求出特征权值集的四种方法。
由于BP 神经网络和极限学习机的相似性,我们选择其中一种方法来训练。
计算一个输入节点的灵敏度。
通过消除训练神经网络的输入节点。
一个输入节点可能被设置的所有连接权重为零。
衡量一个输入的敏感性特征 时之间的预测价值的差异特性删除,当它离开。
灵敏度的输入特性是由用神经网络训练特征加权值的公式如下:00()iLi P P P S N-=∑ (5)0P 是正常的预测值,i P 是去掉第i 个节点(就是第i 个属性)后的预测值,N 是训练集的样本个数,L 是训练样本集。
3 基于在线极限学习机的案例推理混合系统基于在线极限学习机的案例推理混合系统如图4所示。
在图中特征权值的训练和更新扮演着重要的角色。
一旦网络被训练,它就能够提供现有案例库模型中的特征权值信息,并为新案例检索提供信息。
从图4可以看出,极限学习机和案例推理有两个相同的重要性能。
第一,都可以用来进行分类和回归。
在分类问题上,第二,两个方法都有在线学习的功能。
极限学习机可以在加入新案例后重新训练,这时案例库的特征权值和案例库本身也随之更新。
预测查询管理器接收新问题时同时咨询极限学习机和案例推理系统。
当极限学习机和案例推理系统得到一致的预测值时,预测查询管理器正常返回预测值,当预测不一致时,需要进一步报告专家拒绝这些案例。
表达如下:''''2CBR NN CBR NNifP P Reject to Answer P P else Answer P ε-≥+=ε是要设定的误差阈值。
4 仿真实验This section reports an empirical comparision of our feature weighting methods.我们做出两个方面的考虑,第一,我们采用标准数据库UCI 来验证我们的系统的可行性,数据包括4种(2组分类,2组回归),five standard datasets from the UCI collection are used in the experiments, three for classification task and the other two for regression task 在实验二中,我们采集了广西某化工公司生产数据,如表5所示,预测最后难以在线测量的生产指标pH 值,使系统达到软测量功能。
为了对公司技术的保密,我们使用属性1,属性2.。
来代替生产指标。
同时我们将所得到的结果和文献【】进行比较,问题描述问题(2)什么的分类问题描述问题(3)什么的分类问题描述上面三个进行一个列表处理并且做出这三个拒绝率的图表,和K-NN法进行比较,在同一个图中显示。
问题(4)什么的回归问题描述这个进行权值画图,拟合画图,基于案例推理的直接准确度和我们的混合推理准确度,取不同的K值做横坐标轴,准确率做Y轴。
问题(5)为了验证我们的混合系统能够运用到生产实践的软测量技术中,我们采集广西某化工厂,工段过程包含复杂的物理和化学反应,具有非线性、大滞后和不确定性的特点,难以建立精确的机理模型。
常规神经网络建模是静态映射,实际应用中,权值的调节不能充分利用工业生产现场的动态数据信息,效果不理想。