FANUCIO配置说明书
- 格式:doc
- 大小:1.86 MB
- 文档页数:3
设定参数
63
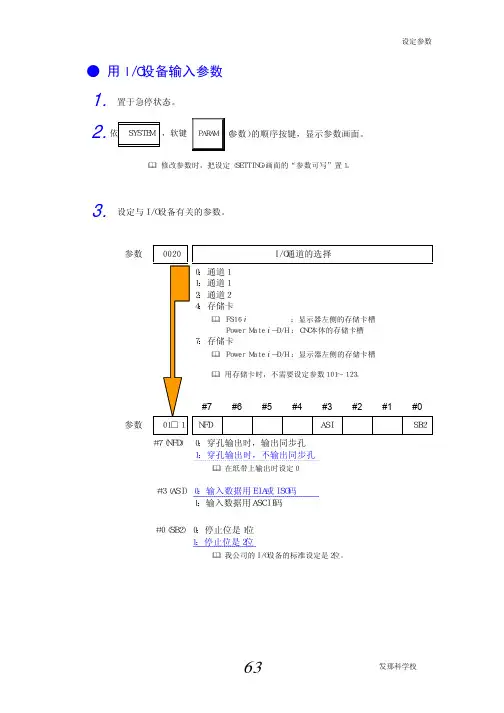
发那科学校●用I/O设备输入参数
1. 置于急停状态。
2.
,软键
的顺序按键,显示参数画面。
修改参数时,把设定(SETTING)画面的“参数可写”置1。
3. 设定与I/O设备有关的参数。
#7(NFD) 0: 穿孔输出时,输出同步孔
1: 穿孔输出时,不输出同步孔
在纸带上输出时设定0
#3(ASI) 0: 输入数据用EIA或ISO码
1:输入数据用ASCII码
#0(SB2) 0: 停止位是1位
1: 停止位是2位
我公司的I/O设备的标准设定是2位。
设定参数
B-10141/0564参数 01□2 输入输出设备号
0: RS-232-C(使用控制代码DC1~DC4)
1: 磁泡存储盒B1/B2
2: 软盘盒F1(2DD)
3: 便携软磁盘机,软盘盒适配器
4: RS-232-C(不使用控制代码DC1~DC4)
5: 便携读带机
6: FANUC PPR,FSP-G,FSP-H参数 01□3 波特率(传
送速度)的设定
7:600 9:2400 11:9600
8:1200 10:4800 12:19200
我公司的I/O设备的标准设定是10:4800。
4. 设定I/O设备或存储器卡等。
5. 用I/O设备按以下步骤输入参数。
6. 参数输入结束后发生000
号报警时,先切断电源,然后再接上电源。
数字伺服参数(2000号~)的设定值,因数字伺服控制软件的系列
和版本而不同。
建议在从软盘读取参数后,再进行后述的“伺服参数的初始设定”。
。
发那科FANUC工业机器人:I/O的分配本次的内容主题是机器人IO的分配。
对于FANUC机器人其IO主要有:通用IO和专用IO两种类型,其中通用IO又包含数字IO、模拟IO和组IO,相对应的专用IO又包含外围设备IO、操作面板IO以及机器人IO。
在这个当中我们需要注意的是:操作面板IO与机器人IO有点特殊,他是不能够进行配置的,而此处我们所指的配置就是指配置其逻辑信号。
FANUC机器人的物理地址是由机架号加上插槽号所组成的,其中机架是用来定义IO模块的种类,比如0代表处理I/O印刷电路板、I/O连接设备连接单元,1-16代表I/O Unit-MODEL A/B,而32代表I/O 连接设备从机接口,对于我们最为重要的则是48代表R-30iB Mate的主板(CRMA15、CRMA16),这对于FANUC 200iD系列是不会发生变化的。
有了种类,我必然也要对每个种类中的个数进行编号或者统计吧?所以插槽号就是针对这个,他是构成机架号的I/O模块的编号,与主板一样,对于200iD系列此处永远设置为1。
在确定了机架和插槽之后,打开示教器的配置画面,发现还有范围和开始点需要进行配置,这也是FANUC机器人比较麻烦的地方,对此控制系统也给予了一定的帮助,就是状态信息,主要有四种状态:Activ,其含义是该设置有效,系统正在使用中,UNASG含义是没有分配,该范围的IO点无法使用,即使调用也不会有任何反应,相当于做了一个空指令;PEND的含义就是该分配是正确的,但是需要手动重启系统之后才能生效,变为ACTIV;最后一个就是INVAL,无效分配,属于该范围内的IO是不起作用的。
在200iD系列中,主要是对CRMA15和CRMA16进行配置,这是机器人与外围设备的主要通信接口。
机器人分别使用一根50芯的电缆线将CRMA15、16接口的信号线引出,将其连接到50芯的端子板上后,就可以根据需要进行线路连接了,这里200ID系列提供了28个输入和2 4个输出。
FANUC机器人的IO地址分配详解FANUC机器人的I/O分配FANUC机器人的IO分为通用型IO(即用户可以自由定义功能而使用)和专用型IO(功能或用途已经确定)。
通用型IO包括:DI/DO、GI/GO、AI/AO;专用型IO分为UI/UO、SI/SO、RI/RO。
本次主要和大家分享UI/UO、DI/DO信号如何进行分配?举个例子:一台FANUC机器人采用的是Profinet通讯方式,作位从站,输入输出IO模块各为16字节。
首先,我们对UI/UO信号进行分配。
UI信号是UI【1】—UI【18】,共18个,UO信号是UO【1】—UO【20】共20个。
按下MENU菜单键,选择IO----选择UOP,进入UOP一览界面。
点击F3“IN/OUT”可以切换输入输出画面;例如,切换到UO画面,点击F2“分配”,进入分配界面,在分配界面中可以看到范围、机架、插槽、开始点、状态。
将光标移动到RACK机架号,输入102,插槽输入1;将光标移动到开始点,输入1;点击确认,可以看到状态变为PEND(已正确分配,需要重新通电,如果已经被正确分配过了,状态应该显示ACTIV),此时断电,重新再通电,即可看到UO的状态显示ACTIV,即已经正确分配并使用。
那么,同样地UI信号的分配也是类似的。
值得注意的是要理解UO【1】—UO【20】这20个点的信号在IO模块的什么位置,比如开始点设为1,那么UO【1】—UO【20】这20个信号就依次被分配在输出模块16个字节(128位)的前20个点位上;如果开始点设为2,那么就分配在第2~第21这20个点位上。
原理理解了,其他的都是很简单的操作了。
那么,分配完了UO,紧接着我们再来分配DO,操作的步骤都是类似的了,唯一要注意的点是:例如:UO【1】—UO【20】,开始点是1,那么DO【1】—DO【i】,开始点就是21,即接着UO的结束点进行分配,这个大家理解了就基本上OK了。
fanuc series 0i-mf 参数说明书Fanuc 0i-MF是Fanuc公司的最新一代数控系统,具有功能强大、操作简便、稳定可靠的特点。
下面将对Fanuc 0i-MF的参数进行说明。
1.硬件参数Fanuc 0i-MF采用高性能的工控机作为控制器,具有以下硬件参数:-主处理器:采用高性能多核处理器,保证了系统的高效稳定运行;-存储器:内置大容量存储器,可存储大量的加工程序和参数设置;-显示器:高分辨率彩色触摸屏显示器,操作界面友好,操作简便;- I/O接口:提供多个数字输入输出和模拟输入输出接口,可连接多种外部设备。
2.轴控制参数Fanuc 0i-MF支持多轴同时控制,具有以下参数设置:-轴数:最多可控制32个轴,可根据加工需求进行灵活配置;-运动控制方式:支持点位控制、直线插补、圆弧插补等多种运动方式;-轴速度:可根据加工需求设置轴的最大速度和加速度;-轴精度:可根据精度要求设置轴的回零精度和运动精度。
3.运动控制参数Fanuc 0i-MF具有强大的运动控制功能,可以精确控制加工过程,具有以下参数设置:-插补周期:可根据加工要求设置插补周期,确保运动平滑;-进给速度:可根据加工物料和加工工艺设置进给速度;-快速移动速度:支持设置快速移动速度,提高加工效率;-加工时间:可根据加工过程的复杂程度设置加工时间。
4.输入输出参数Fanuc 0i-MF支持多种输入输出设备和接口,可以满足不同的外部连接需求,具有以下参数设置:-数字输入输出:支持设置多个数字输入输出和开关量输入输出;-模拟输入输出:支持设置多个模拟输入输出和模拟量输入输出;-通信接口:支持以太网、RS232、USB等多种通信接口,方便与外部设备进行数据交互。
5.用户界面参数Fanuc 0i-MF操作界面简单直观,友好易用,可自定义设置,具有以下参数设置:-显示语言:支持多种语言选择,适应不同国家和地区的操作需求;-操作方式:支持手动操作和自动操作两种模式,方便操作人员操作;-图形界面:支持显示加工路径、示教示意图、参数设置等图形化界面。
参考资料:FANUC O系列操作编程说明书第一篇:编程5 1.综述5 1.1可编程功能5 1.2准备功能51.3辅助功能72.插补功能8 2.1快速定位(G00)8 2.2直线插补(G01)82.3圆弧插补(G02/G03)93.进给功能11 3.1进给速度11 3.2自动加减速控制11 3.3切削方式(G64)11 3.4精确停止(G09)及精确停止方式(G61) 123.5暂停(G04) 124.参考点和坐标系13 4.1机床坐标系13 4.2关于参考点的指令(G27、G28、G29及G30) 13 4.2.1 自动返回参考点(G28)13 4.2.2 从参考点自动返回(G29)13 4.2.3 参考点返回检查(G27)14 4.2.4 返回第二参考点(G30)14 4.3工件坐标系15 4.3.1 选用机床坐标系(G53)15 4.3.2 使用预置的工件坐标系(G54~G59)15 4.3.3 可编程工件坐标系(G92)16 4.3.4 局部坐标系(G52) 164.4平面选择175.坐标值和尺寸单位185.1绝对值和增量值编程(G90和G91)186.辅助功能19 6.1M代码19 6.1.1 程序控制用M代码19 6.1.2 其它M代码19 6.2T代码19 6.3主轴转速指令(S代码) 206.4刚性攻丝指令(M29)207.程序结构21 7.1程序结构21 7.1.1 纸带程序起始符(Tape Start) 21 7.1.2 前导(Leader Section) 21 7.1.3 程序起始符(Program Start) 217.1.4 程序正文(Program Section) 21 7.1.5 注释(Comment Section) 21 7.1.6 程序结束符(Program End) 21 7.1.7 纸带程序结束符(Tape End) 22 7.2程序正文结构22 7.2.1 地址和词22 7.2.2 程序段结构227.2.3 主程序和子程序238.简化编程功能25 8.1孔加工固定循环(G73,G74,G76,G80~G89) 25 8.1.1 G73(高速深孔钻削循环)28 8.1.2 G74(左螺纹攻丝循环)29 8.1.3 G76(精镗循环) 29 8.1.4 G80(取消固定循环) 30 8.1.5 G81(钻削循环) 30 8.1.6 G82(钻削循环,粗镗削循环) 31 8.1.7 G83(深孔钻削循环) 31 8.1.8 G84(攻丝循环) 32 8.1.9 G85(镗削循环) 32 8.1.10 G86(镗削循环) 32 8.1.11 G87(反镗削循环) 33 8.1.12 G88(镗削循环) 33 8.1.13 G89(镗削循环) 34 8.1.14 刚性攻丝方式348.1.15 使用孔加工固定循环的注意事项359.刀具补偿功能36 9.1刀具长度补偿(G43,G44,G49) 36 9.2刀具半径补偿36 9.2.1 补偿向量36 9.2.2 补偿值36 9.2.3 平面选择36 9.2.4 G40、G41和G4236 9.2.5 使用刀具半径补偿的注意事项37第二篇:NC操作381.自动执行程序的操作38 1.1CRT/MDI操作面板38 1.1.1 软件键38 1.1.2 系统操作键38 1.1.3 数据输入键38 1.1.4 光标移动键38 1.1.5 编辑键和输入键38 1.1.6 NC功能键38 1.1.6 电源开关按钮39 1.2MDI方式下执行可编程指令39 1.3自动运行方式下执行加工程序39 1.3.1 启动运行程序391.3.2 停止运行程序392.程序验证和安全功能40 2.1程序验证功能40 2.1.1 机床闭锁402.1.2 Z轴闭锁40 2.1.3 自动进给的倍率40 2.1.4 快速进给的倍率40 2.1.5 试运行40 2.1.6 单程序段运行402.2安全功能402.2.1 紧急停止402.2.2 超程检查403.零件程序的输入、编辑和存储41 3.1新程序的注册41 3.2搜索并调出程序41 3.3插入一段程序41 3.4删除一段程序41 3.5修改一个词423.6搜索一个词424.数据的显示和设定43 4.1刀具偏置值的显示和输入43 4.2G54~G59工件坐标系的显示和输入43 4.3NC参数的显示和设定434.4刀具表的修改445.显示功能45 5.1程序显示455.2当前位置显示456.在线加工功能46 6.1有关参数的修改:466.2有关在线加工的操作. 467.机床参数的输入﹑输出478.用户宏B功能49 8.1变量49 8.1.1变量概述498.1.2系统变量508.2算术和逻辑操作55 8.3分支和循环语句56 8.3.1无条件分支(GOTO语句)56 8.3.2条件分支(IF语句)57 8.3.3循环(WHILE语句)57 8.3.4注意58 8.4宏调用58 8.4.1简单调用(G65)58 8.4.2、模调用(G66、G67)60 8.4.3G码调用宏61 8.4.4、M码调用宏618.4.5M码调用子程序62 8.4.6T码调用子程序62 8.5附加说明62附录1:报警代码表641.程序报警(P/S报警) 642.伺服报警653.超程报警664.过热报警及系统报警66第一篇:编程1. 综述1.1 可编程功能通过编程并运行这些程序而使数控机床能够实现的功能我们称之为可编程功能。
F A N U C常用系统参数说明-CAL-FENGHAI.-(YICAI)-Company One1FANUC0小括号()改为中括号【】将3204中的PAR由0改为1.释放风扇报警(ALM701)参数PRM8901#0(FAN)O8000-O8999保密设置NE8#0).O9000-O9999保密设置NE9#4).FANUC Series Oi-MD:在显示器上修改梯图。
按SYSTEM键,按右扩展键几次,直到显示器下面出现[PMCCNF]时,按[PMCCNF]软键,按[设定]软键,在出现的画面上将:编程允许(EDIT ENABLE),内置编程器许可(PROGRAMMER ENABLE),编辑后保存到快闪存储器(WRITE TO F-ROM (EDIT)),这三项打开即可修改梯图.FANUC Series Oi-MC :按SYSTEM 键,按 [ > ] 软键几次,当出现[PMCPRM]软键时按此键,按[SETING]软键,在出现的画面上将:EDIT ENABLE置1 WRITE TO F-ROM (EDIT)置1PROGRAMMER ENABLE 置1这三项打开即可修改梯图。
这三项只要能置为1 ,就能进入梯图修改,若置不了1,就是有参数封住了,防止别人乱改梯图。
对于有密码的梯形图,要输入密码才可以看到,才可以修改。
为使用梯形图编辑功能,应该在“PARAMETERSFORONLINEMONITOR”中把“RS-232-C”和“F-BUS”选择为“NOTUSE”,以使在线监控功能无效。
自动插入顺序号:0000 #5 SEQ自动插入顺序号增量值:3216最大主轴转速:3772加工中心乱刀修正System------参数-----PNMNET-----数据-----操作-----缩放-----寻找。
旧版本系统D144,主轴25,D145 1POT(1).D146(2)……新版本系统D300主轴25,D301 1POT(1).D302 2POT(2)……I/O通道号(参数()):I/O CHANNEL=0 0101停止位和其它数据。
FANUC Series OI 0iMC系统操作说明书手册B20244 FANUC Series OI 0iMC系统操作说明书手册B20244介绍本操作说明书手册是为FANUC Series OI 0iMC系统用户编写的,旨在提供系统的基本操作和使用方法。
本手册涵盖了系统的基本操作、编程和控制功能,以及维护和故障排除方面的内容。
在使用本手册之前,请仔细阅读引言部分,了解使用本手册的要求和注意事项。
适用范围本操作说明书手册适用于FANUC Series OI 0iMC系统的用户。
手册提供了针对系统的基本操作、编程和控制功能的详细说明,并包含了维护和故障排除方面的内容。
读者对象本操作说明书手册是为FANUC Series OI 0iMC系统的用户编写的。
读者应该具备基本的数控机床操作和编程知识。
创作说明本操作说明书手册是由FANUC工程师和编辑人员联合编写的。
他们在编写过程中进行了大量的测试和实践,以确保提供准确、清晰和实用的信息。
引言FANUC Series OI 0iMC系统是一种高性能、高可靠性的数控系统,广泛应用于加工中心、数控车床等机床设备。
本操作说明书手册旨在为用户提供系统的基本操作和使用方法,帮助用户更好地理解和使用FANUC Series OI 0iMC系统。
在使用本手册之前,请注意以下事项:1、本手册是基于当前已知的机床配置和功能编写的。
如果您的机床配置不同或功能有所变化,请参考相关的机床文档或联系FANUC技术支持。
2、本手册提供的操作步骤和指导是基于一般情况下的常见做法。
在具体操作时,请根据您的机床配置和实际情况进行调整。
3、在进行系统设置和修改时,务必小心操作,避免误操作导致系统故障或损坏。
如果您不确定如何进行操作,请参考相关的机床文档或联系FANUC技术支持。
4、请保持本手册干燥、清洁,不要将其放在有损毁或潮湿的环境中。
如有损坏或遗失,请及时联系FANUC技术支持。
结构本操作说明书手册分为以下几个部分:1、第1章概述2、第2章基本操作3、第3章编程和控制功能4、第4章维护和故障排除5、附录第1章概述介绍了FANUC Series OI 0iMC系统的基本特点和性能指标,为后续章节提供了背景和基础知识。
FANUC M-10iA R-30iA Mate 基本操作手册FANUC M-10iA R-30iA Mate 基本操作手册章节一、简介1.1 概述1.2 技术规格1.3 组成部件1.3.1 手腕1.3.2 控制器章节二、安装与设置2.1 安装前的准备工作2.2 的安装2.3 控制器的连接与设置2.4 电源与电气接线章节三、的基本操作3.1 的开关机3.2 程序与文件的管理3.3 示教模式的使用3.4 示教与回放操作3.5 基本运动指令的使用3.6 运动示教与编辑3.7 IO 接口的操作3.8报警与故障处理章节四、高级操作4.1 自动化生产流程的编程4.2 程序编辑与调试4.3 取样运动的优化4.4 传感器的应用与配置4.5 外部设备的控制章节五、维护与保养5.1 日常维护与保养5.2 的安全操作5.3 常见故障与排除方法5.4 部件更换与维修章节六、附件附件一、FANUC M-10iA R-30iA Mate 的技术规格表附件二、操作快速参考手册注:本文档所涉及的法律名词及注释:1、:根据《法》的定义,是一种用于代替人类工作的自动化设备,具备感知、决策和执行能力。
2、示教:通过手动操作,把的动作输入到控制器,用于记录运动轨迹、保存程序等。
3、回放:将之前示教好的动作再次执行,实现自动化操作。
本文档涉及附件:1、附件一、FANUC M-10iA R-30iA Mate 的技术规格表,详细描述了的参数、性能等信息。
2、附件二、操作快速参考手册,提供了的基本操作指南,方便用户快速了解和使用。
第五节I/O LINK 模块的设置马胜胡年北京FANUC 0i-B /0i-Mate-B 系统,由于I/O 点、手轮脉冲信号都连在I/O LINK 总线上,在PMC梯形图编辑之前都要进行I/O 模块的设置(地址分配),同时也要考虑到手轮的连接位置。
1.0i-B:由于0i-B 本身带有内置I/O 板(虽然该I/O 点表面上看起来与0I-A 系统相似,但其96/64 点也连在I/O LINK 上,占用I/O LINK 点。
所以也要进行I/O 模块的地址分配)1.1 内置I/O 板,当不再连接其它模块时可设置如下:从X0 开始0.0.1.OC02IY0 开始0.0.1./8注:此时手轮接于系统的内置I/0 板的JA3 上,手轮信号从x12---x14 引入系统,如此处分配少于16 字节(OC02I 为16 字节),系统上手轮接口将无效。
1.2.当使用标准机床面板时,手轮有两种接法(1)接在系统上JA3可设置如下:系统侧的I/O 点从X0 开始0.0.1.OC02IY0 开始0.0.1./8面板侧的I/O 点从X20 开始 1.0.1. OC02I(或OC01I)Y24 开始 1.0.1./8*此种设法可使面板上x/y 数值上一样(X24 对应Y24 的信号名称,如此类推,如:X24.0 为MEM 方式的X 地址,Y24.0 为MEM 方式输出灯),便于编写梯形图,且注意此时面板后JA3 无效注:此时虽然两个模块都分配了16 个字节大小,但系统上的I/O 点是离系统最近的一个16 字节模块,手轮信号从系统侧的X12—X14 引入,面板后JA3 无效。
(2)接在面板后JA3可设置如下:系统侧的I/O 点从X0 开始0.0.1.OC01IY0 开始0.0.1./8面板侧的I/O 点从X20 开始1.0.1. OC02I (OC02I 对应手轮)Y24 开始1.0.1./8注:此时手轮信号从面板侧的X32—X34 引入,系统侧内置I/O 板上的JA3 无效。
FANUC-0I系统操作说明一、开机1.机床电源开(在机床左侧)2.伺服电源开(机床操作面板绿色键)二、回原点1.将OFFSET刀具偏置中的G54数值、刀具补正、刀具摩耗都清零。
2.将模式选择旋钮放置在手动状态,手动方式将刀架往X、Z负方向移动使刀架离卡盘的距离大于30—50㎜3.将模式选择旋钮放置在回原点状态,按住X+、Z+不放,此时机床自动回原点(CRT显示机械坐标为X350 Z300)三、编辑程序1.将模式选择旋钮放置在编辑状态2.按PROG程序按钮3.写程序号Oxxx x→INSERT4.按EO B程序结束符号→INSERT5.编写程序四、检验程序1.RESET[复位] →将光标放到程序号上2.将模式选择旋钮放置在手动状态,卡盘夹紧工件,指示灯亮,关闭防护门3.将模式选择旋钮放置在自动状态4.将机床轴锁开关打开(此时机床进给锁住)★千万不能忘5.按图形键GRAPH→设置参数→加工图6.按循环启动键7.再次按图形键GRAPH★注意:1.轨迹模拟后机床进给锁住,报警信号闪烁是正常现象2.模拟结束后,关闭机床轴锁开关,再次回原点(否则自动加工时会出错)五、输入工件坐标系和摩损量1. 将模式选择旋钮放置在手动状态,装刀具(铣床装卡盘与工件,校正工件)2. 车床主轴反转(铣床主轴正转)3. 调整转速4. 车端面→X正方向推出5. OFFSET(刀具编制)打开→形状(铣床为坐标系)→G 01→光标放到Z坐标上6. 写Z0→按“测量”软键7. 车外圆→Z正方向退出→主轴停8. 测量工件外圆直径(例:¢39.7)9. OFFSET(刀具编制)打开→形状→G 01→光标放到X坐标上10. 写工件直径(X39.7)→按“测量”软键11. OFFSET(刀具编制)打开→摩耗→M 01→光标放到X坐标上→写入0.5(铣床将刀具半径补偿4.1输入)六、自动加工1.选加工程序,RESET,将光标移到程序号上2.将模式选择旋钮放置在自动状态3.卡盘夹紧工件,关闭防护门4.单段开关打开5.将进给、快速倍率调低6.按循环启动键7.一个循环结束后,单段开关关闭8.按循环启动,自动加工。
F a n u c机器人I O配置和U I U O配置Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767 •模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
百度文库 - 让每个人平等地提升自我
1
FANUC IO配置说明书
一、 前提条件
1、 此操作说明书仅适用于FANUC机器人。
二、 配置步骤
1、按照图示按键操作进入IO界面
2、 按F2(CONFIG)定义按钮进入配置界面
按键操作界面
IO界面
百度文库 - 让每个人平等地提升自我
2
4、配置IO
这四个状态分别表
示①需要重启生效、
②无效、③激活、④
未分配。
RACK表示IO设备
的通讯种类:①0为
Process I/O board、②
67为Profibus、③
82~84为DeviceNet
START表示IO模块
开始的引脚数。例如
21表示IO板上的输
出第21个口定义为
DO[1]
SLOT表示IO模块
的数量,使用Process
I/O board时1表示第
一块,2表示第二块。
百度文库 - 让每个人平等地提升自我
3
四、 注意事项
1、 当需要定义的Profibus IO口超过8个字节(随厂默认配置)时,需要进行如下操
作。
①、按照图示界面操作进入配置界面
2、 操作面板输入/输出SI[ i ]/SI[o]和机器人输入/输出RI[ i ]/RI[o]为硬线连接,不需要
配置。
可以设置输入/输
出的字节数,设置
完成后需要重启。