DIS实验研究机械能守恒定律解析
- 格式:ppt
- 大小:1.18 MB
- 文档页数:15

实验十一 研究机械能守恒定律实验器材朗威DISLab 数据采集器、光电门传感器、DISLab 机械能守恒实验器、铁架台、计算机。
实验装置如图11-1。
实验操作实验(一)1.架设好DISLab 机械能守恒实验器。
本实验使用DISLab 机械能守恒实验器的主板、副板、定位挡(实验器的安装参见附录。
注意:虽然图11-1中光电门传感器已安装,但不在本实验中使用);2.将定位挡片分别固定在“P 、Q 、R ”三个点,在“A 、B 、C ”三个点释放摆锤,使摆锤线在摆动过程中受到定位挡片的阻挡;3.观察不同点释放摆锤时摆锤在副板上升的位置,用记号笔标出该位置在副板上的投影点;4.总结挡片位置、摆锤释放点与摆锤到达点的关系,使学生对论机械能守恒定律有一个定性的了解。
图11-1 验证机械能守恒定律装置图实验(二)1.架设好DISLab 机械能守恒实验器。
如图11-1,将光电门传感器接入数据采集器第一通道。
2.点击教材专用软件主界面上的实验条目“动能势能转换”,打开该软件(图11-2)。
3.测量DISLab 机械能守恒实验器摆锤的直径Δs 及其质量m ,将数据输入软件窗口下方的表格。
4.将磁铁夹固定在DISLab 机械能守恒实验器的A 点,依次将光电门固定在D 、C 、B 点。
固定光电门和磁铁夹时为达到精确定位,需使用测平器(测平器的使用方法参见用户手册)。
5.点击“开始记录”。
在A 点释放实验器的摆锤,摆锤通过光电门传感器的速度就显示在表格中。
6.变更光电门的位置,得出光电门传感器在D 、C 、B 三点时的数据(图11-3)。
7.点击“数据计算”,得到摆锤通过B 、C 、D 各点时的动能、势能和机械能值(图11-4)。
8.根据实验结果,可见在误差范围内,动能势能转化过程中机械能保持不变。
注意每次释放摆锤之前,均需点击“开始记录”。
图11-2 机械能守恒定律实验界面图11-4 测量并计算得到结果图11-3 记录实验数据。
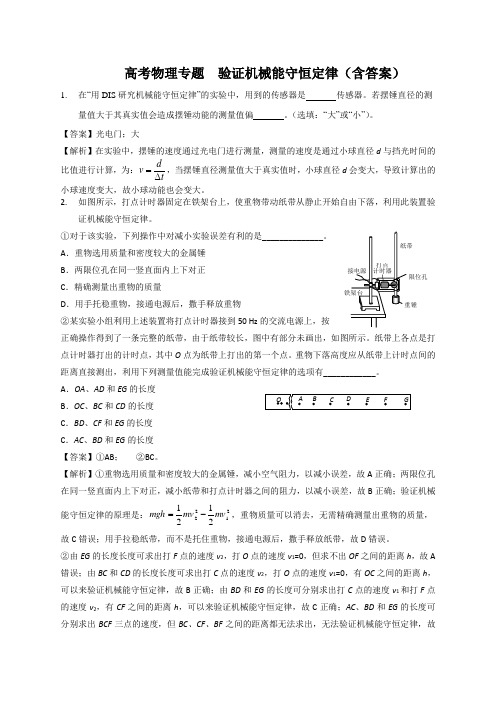
高考物理专题 验证机械能守恒定律(含答案)1. 在“用DIS 研究机械能守恒定律”的实验中,用到的传感器是 传感器。
若摆锤直径的测量值大于其真实值会造成摆锤动能的测量值偏 。
(选填:“大”或“小”)。
【答案】光电门;大【解析】在实验中,摆锤的速度通过光电门进行测量,测量的速度是通过小球直径d 与挡光时间的比值进行计算,为:dv t=∆,当摆锤直径测量值大于真实值时,小球直径d 会变大,导致计算出的小球速度变大,故小球动能也会变大。
2. 如图所示,打点计时器固定在铁架台上,使重物带动纸带从静止开始自由下落,利用此装置验证机械能守恒定律。
①对于该实验,下列操作中对减小实验误差有利的是______________。
A .重物选用质量和密度较大的金属锤 B .两限位孔在同一竖直面内上下对正 C .精确测量出重物的质量D .用手托稳重物,接通电源后,撒手释放重物②某实验小组利用上述装置将打点计时器接到50 Hz 的交流电源上,按正确操作得到了一条完整的纸带,由于纸带较长,图中有部分未画出,如图所示。
纸带上各点是打点计时器打出的计时点,其中O 点为纸带上打出的第一个点。
重物下落高度应从纸带上计时点间的距离直接测出,利用下列测量值能完成验证机械能守恒定律的选项有____________。
A .OA 、AD 和EG 的长度 B .OC 、BC 和CD 的长度 C .BD 、CF 和EG 的长度 C .AC 、BD 和EG 的长度 【答案】①AB ; ②BC 。
【解析】①重物选用质量和密度较大的金属锤,减小空气阻力,以减小误差,故A 正确;两限位孔在同一竖直面内上下对正,减小纸带和打点计时器之间的阻力,以减小误差,故B 正确;验证机械能守恒定律的原理是:21222121mv mv mgh -=,重物质量可以消去,无需精确测量出重物的质量,故C 错误;用手拉稳纸带,而不是托住重物,接通电源后,撒手释放纸带,故D 错误。

学习水平:C级实验性质:学生实验学习要求:6.1.7 设计“用DIS研究机械能守恒定律”的实验①知道实验目的;②能设计实验方案;③能参照设计的实验方案,独立完成相关操作;④能根据实验数据得出结论核心考点:1.知道实验仪器的名称,了解光电门传感器测速原理;2.知道实验的原理;3.正确表述实验结论;4.会区分E-h、E p-h与E k-h图像;5.会误差分析。
一、实验要求:《教学基本要求》P64二、实验器材:机械能守恒实验器、DIS(光电门传感器、数据采集器、计算机等)三、实验原理:分别测定摆球在摆动过程中任意时刻的动能和势能,研究机械能的总量有什么特点。
本实验分成定性研究a和定量研究b两部分:a) 通过改变定位挡片的位置,改变摆锤向左摆动时摆绳的长度。
观察摆锤每次摆到左边最高点时的位置与释放点位置的高度关系,只能定性地得到摆锤在这两个位置机械能相等的结论。
b) 通过DIS测定摆球在不同位置的瞬时速度,从而通过DIS软件求得摆球在该位置的动能,同时输入摆锤的高度,求得摆锤在该位置的重力势能,进而研究重力势能与动能转化时的规律。
四、实验操作注意事项1. 实验中摆锤的直径Δs和其质量m由老师告知,直接通过键盘输入软件界面。
2. 实验中可测量计算机默认高度处(A、B、C、D)的机械能,也可自选其他位置并通过键盘输入所测量高度的数值。
3. 实验中A、B、C、D四点相对于摆锤最低点的高度为0.150m、0.100m、0.050m、0.000m已由计算机默认,不必输入。
4. 若测量计算机默认高度处的机械能,光电门传感器定位的顺序是D、C、B。
5. 调整光电门的高度时要将光电门的红外线发射孔或接收孔的中心位置调节到所测量的高度。
6. 每次释放摆锤前摆线要拉直。
7. 实验中测量四个位置的速度需要摆球重复四次相同的运动,因此要求每次无初速度释放摆球,且释放位置保持不变。
五、实验误差可能原因1.空气阻力使摆锤的机械能有所减少。

学生实验:用DIS研究机械能守恒-沪科版高一物理下册教案实验目的本实验旨在通过使用DIS实验器材,研究机械能守恒的规律和运动学原理,并帮助学生提升自己的实验能力和实验技能。
实验器材•DIS实验器材•计时器•钢球•直线轨道•尺子•平衡木实验步骤第一步:铺设直线轨道将直线轨道铺设好,并将其固定在水平面上,以保证铺放的位置准确无误。
第二步:安装DIS实验器材将DIS实验器材安装在直线轨道的起点和终点处,注意起点处铺设实验器材时,要使铁球从设备的中心下落,从而保证实验的有效性。
第三步:进行实验在进行实验前,先测量一下直线轨道的长度,并在起点处放置钢球,确定起始位置。
当钢球从起点出发后,DIS实验器材将会测量出钢球的速度和时间,记录下这些数据。
当钢球到达直线轨道的终点时,同样测量一下钢球的速度,并计算出钢球通过直线轨道所产生的动能和势能的变化量。
第四步:数据处理根据测量得到的数据,进行计算并记录实验结果。
通过计算动能和势能的变化量,验证机械能守恒定律是否成立,以及机械能的转化和机械能守恒的规律。
第五步:维护实验设备存放好实验设备,并将其清洗干净,以便下一次实验使用。
实验注意事项•在实验过程中,要注意操作规范和安全,避免发生安全事故。
•在进行实验前,先仔细检查实验设备和器材,确保实验顺利进行。
•在实验结束后,应及时清洗和维护实验设备,以保证下一次使用。
•在进行实验操作时,要保持实验环境的干净和整洁,以确保实验的可靠性和精度。
•初次进行实验时,应注意观察和品味实验结果,分析和总结实验过程中遇到的问题和解决方法,并有针对性地提出改进意见。
实验总结通过学习和实践,通过DIS实验器材研究机械能守恒定律,能让学生更好地理解和掌握物理知识,提升其实验能力和实验技能。
同时,也帮助学生培养科学探究的兴趣,提高他们的科学素养和创新意识,进一步提高其知识水平和实践能力。
验证机械能守恒定律-课文知识点解析一、实验目的:验证机械能守恒定律.二、实验器材:铁架台(带铁夹)、打点计时器、重锤(带纸带夹子),纸带几条,复写纸片、导线、直尺、学生电源.三、实验原理在只有重力做功的自由落体运动中,物体的重力势能和动能互相转化,但总的机械能守恒.若物体某时刻瞬时速度为v ,下落高度为h ,则有:mgh =21mv 2. 故只需借助打点计时器,通过纸带测出重物某时刻的下落高度h 和该时刻的瞬时速度v ,即可验证机械能是否守恒.确定第n 点的瞬时速度的方法是:测出第n 点相邻的前、后两段相等时间T 内下落的距离s n 和 s n +1,由公式v n =T s s n n 21++或由v n =Td d n n 211-+-求解. 四、实验步骤1.按图4-5-1将打点计时器安装在铁架台上,用导线把打点计时器与学生电源连接好.B2.用手竖直提起纸带使重锤停靠在打点计时器附近.3.先接通电源后松手,让重锤带着纸带自由下落.4.重复几次,得到3~5条打好点的纸带.5.在打好点的纸带中挑选点迹清晰且第1、2两计时点间距离接近2 mm 的一条纸带,在起始点标上O ,以后各点依次标上1、2、3……用刻度尺测出对应下落高度h 1、h 2、h 3……6.应用公式v n =Th h n n 211-+-计算各点对应的即时速度v 1、v 2、v 3…… 7.计算各点对应的势能减少量mgh n 和动能增量21mv n 2,并进行比较. 五、数据分析全析提示纸带的处理是本实验的关键.1.实验中打点计时器的安装,两限位孔必须在同一竖直线上,以减少摩擦阻力.2.实验时,必须先接通电源,让打点计时器工作正常后,才能松开纸带让重锤下落.3.纸带上端要用手提着静止,这样可保证下落的初速度为零,并且纸带上打出的第一个点是清晰的一个小点.4.测量下落高度时,都必须从起点算起,不能搞错.为了减小测量h 值的误差,选取的各个计数点要离起始点远些,纸带也不宜过长,约40 cm 即可.5.实验中重物和纸带下落过程中要克服阻力(主要是打点计时器的阻力)做功,所以动能的增加量ΔE k 一定稍小于势能的减少量ΔE p .6.因不需要知道动能的具体数值,因此不需要测出重物的质量m .7.铁架台上固定打点计时器的夹子不可伸出太长,以防铁架台翻倒.DhBhCh图4-5-2按图4-5-2所示的方法处理纸带,取A 、B 、C 、D 四个点,并以D 点为参考点,测量的一组数据供参考(表7-1),老师们可以根据学生的水平提出不同的处理方法要求.表7-1 m =0.2 kg g =9.79 m ·s -2Δt =0.04 s。
专题:用DIS研究机械能守恒定律的实验一、用DIS研究温度不变时,一定质量的气体压强与体积的关系【实验原理】将实验装置中的光电门传感器接入数据采集器,测定摆锤在某一位置的瞬时速度,分别测定摆锤在摆动过程中任意时刻的动能和势能,研究机械能的总量有什么特点。
【实验步骤】实验1观察由同一位置释放的摆锤,当摆线长度不同时,摆锤上升的最大高度。
实验时先卸下“定位挡片”,将摆锤置于A点,释放摆锤,观察它摆到左边最高点时的位置,看这个高度与A点位置是否相同装上定位挡片并置于P点位置,它对摆绳有阻挡作用。
再次释放摆锤,记下摆锤向左摆起的最大高度。
依次将定位挡片下移至Q、R等位置,重复上述实验。
(能摆到相同高度,说明此时机械能守恒)实验2安装传感器,开启软件。
测瞬时速度,从而求得摆锤的动能和重力势能。
测量摆锤的直径Δs及其质量m。
把光电门传感器放在标尺盘最底端的D点,并以此作为零势能点。
摆锤置于A点,点击“开始记录”,同时释放摆锤,摆锤通过D点的速度将自动记录在表格的对应处。
计算D点的势能、动能和机械能。
依次将光电门传感器放在标尺盘的C、B 点,重复实验,得到相应的数据。
比较上述实验结果中各位置的机械能,在实验误差允许范围内,可看出动能和势能的和为一定值。
【注意事项】1.实验中A、B、C、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认,不必输入2.摆锤每次均从A点无初速释放,A点位置不能移动。
3.光电门传感器定位的顺序是D、C、B,不能颠倒,且光电门传感器定位要正确。
4.摆线不易伸长的线,如单根尼龙丝、胡琴丝或蜡线。
且摆锤在A点静止时摆线不能松驰【误差分析】1.空气阻力使摆锤的机械能有所减少2.A、B、C、D四点定位有误差,使高度的值有误差,引起测得的重力势能有误差3.摆线在D、C、B位置均有不同程度的伸长量典型例题题型1 实验步骤和内容1.“用DIS研究机械能守恒定律”的实验中,用光电门测定摆锤在某一位置的瞬时速度,从而求得摆锤在该位置的动能,同时输入摆锤的高度(实验中A、B、C、D四点高度为0.150m、0.100m、0.050m、0.000m,已由计算机默认),求得摆锤在该位置的重力势能,进而研究势能与动能转化时的规律。