新型柔性触觉传感器阵列结构设计及仿真研究
- 格式:pdf
- 大小:313.02 KB
- 文档页数:4
基于EIT技术的柔性触觉传感器的设计程文芳;王晓杰;董帅【摘要】随着机器人技术的日益发展,柔性传感器在机器人皮肤上的应用也得到了新的发展。
本文提出并研究了一种基于导电聚合物压敏电阻效应的柔性触觉传感器的设计,使用由聚二甲基硅氧烷PDMS(Poly Di Methyl Siloxane)和多壁碳纳米管(MWCNTs)混合而成的导电橡胶作为传感器主体,运用EIT(Electrical Impedance Tomography)技术,设计并制作了本系统的硬件电路,并用其检测、传输导电橡胶的边缘电势数据。
最后在计算机中应用工具包EIDORS进行有限元模型和图像重构技术,有效且直观的将导电橡胶上的受力位置表现出来。
实验对1~3个目标分别进行了成像,证明了本设计的可行性。
%The rapid development of robot technology has led to new applications of soft sensors for robotic sensitive skin. In this paper we present a study on the design of flexible tactile sensor based on the piezoresitivity of a new conductive polymer which has been developed by ourselves. The conductive polymer is made by blending PDMS (polydimethylsiloxane,polydimethylsiloxane)with a small amount of multi-walled carbon nanotubes(MWCNTs) which has a high sensitivity in resistance-pressure response. The Electrical Impedance Tomography(EIT)is used to create the flexible tactile sensor. The peripheral hardware circuits based on EIT are designed and manufactured. The data obtained from hardware circuits is processed by computer. The finite element modeling and image recon⁃structue has been performed with a toolkit calledEIDORS. The experiment has been carried out to successfully identify the positions of the targets in 1~3 goals when touching on the sensor surface.【期刊名称】《传感技术学报》【年(卷),期】2016(029)002【总页数】6页(P155-160)【关键词】柔性触觉传感器;EIT;导电橡胶;EIDORS【作者】程文芳;王晓杰;董帅【作者单位】中国科学技术大学自动化系,合肥230027; 中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中国科学技术大学自动化系,合肥230027; 中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164【正文语种】中文【中图分类】TP212.1随着传感器技术的不断发展,适用于机器人“皮肤”的柔性触觉传感系统引起了人们的广泛关注。
柔性传感器的制备与性能研究柔性传感器是一种新型的传感器技术,其可以根据被测量的对象的状态、形状和环境等因素而变化,能够实时监测和反映这些变化的情况。
它具有柔性和可重复性等特点,能够应用于多种领域,如智能机器人、医疗设备、智能家居等。
本文将介绍柔性传感器的制备方法和性能研究。
一、制备方法1.材料选择:柔性传感器的材料必须具有柔性、可塑性、导电性和灵敏性等特点,如聚合物材料、碳纳米管、金属微丝、碳黑等。
2.制备流程:柔性传感器的制备流程一般包括以下几个步骤:(1)原材料制备:将所选的材料进行加工、混合等处理,确保材料达到所需的性质;(2)材料修饰:将原材料进行表面化学修饰等处理,增强其与导电材料的附着能力和导电性;(3)导电层制备:将导电材料涂布或印刷在基底上,形成导电层;(4)敏感层制备:将敏感材料涂布或印刷在导电层上,形成敏感层;(5)传感器组合:将导电层和敏感层组合在一起,形成柔性传感器。
二、性能研究1.敏感性能:柔性传感器的敏感性能是指其对于被测量的物理量变化的反应程度,可以通过测量其电阻值的变化来反映敏感性能。
研究者可以通过改变敏感材料的种类和含量、导电层和敏感层的厚度和比例等因素来控制敏感性能。
2.可重复性:柔性传感器具有可重复使用的特点,可以重复测量同一物理量,并能够在一定范围内保持一定的精确度和稳定性。
因此,研究者需要对其可重复性进行测试,了解其实际使用中的精度和准确性。
3.环境适应性:柔性传感器可以应用于多种环境下,但在不同的环境中,其性能可能会发生变化。
因此,需要对其在不同的环境下进行测试,了解其适应性和稳定性。
4.应用研究:柔性传感器在医疗设备、机器人、智能家居等领域中的应用越来越广泛。
研究者可以通过实际应用中的反馈,进一步优化传感器的性能和结构。
总之,柔性传感器的制备与性能研究是一个不断探索和发展的过程。
在未来的研究中,我们需要进一步探索其机理,优化其结构和性能,并将其应用于更广泛的领域中。
柔性传感器的设计与应用研究随着物联网技术的不断发展,智能硬件的市场需求也在迅速上升。
在智能硬件的发展中,传感器技术占据了非常重要的位置。
其中,柔性传感器作为一种新型传感器,在生物医学、机器人等领域有着广泛的应用前景。
本文将着重探讨柔性传感器的设计与应用研究。
一、柔性传感器概述柔性传感器是一种基于柔性材料的传感器,相比于传统的硬性传感器,柔性传感器生产成本低、体积小、重量轻、易于集成等优点。
由于传统的传感器一般采用刚性材料生产,故其在实用性、舒适性等方面存在一定的缺陷。
而随着柔性传感器的兴起,这些问题都得到了有效解决。
柔性传感器的生产材料多种多样,如聚合物、金属、纤维和碳纳米管等。
二、柔性传感器的设计柔性传感器的设计一般包括传感体的设计、电缆布线的设计,以及信号放大器和数据处理器的设计。
先从传感体的设计入手,柔性传感器的传感器体可通过打印、喷绘、薄膜等多种方法制备而成,其制备过程需要考虑材料的选择、制备方法的选择以及工艺参数等。
同时,在电缆布线的设计中,需要考虑布线方式合理性、插头型号、防潮性以及耐高温性能等。
而信号放大器和数据处理器的设计则是更加复杂的一部分,其设计需要考虑灵敏度、稳定度、可靠度以及功耗等相关因素。
三、柔性传感器的应用研究柔性传感器由于其优异性能和设计的灵活度,已经在多个领域中得到了广泛应用。
其中,机器人领域是柔性传感器应用最为广泛的领域之一。
柔性传感器可以用于肌肉传感器、手指传感器、压力传感器等方面,以帮助机器人更快速、更精确地感知环境并进行各种操作。
此外,在医学领域,柔性传感器也有较为重要的应用,如心电图传感器、荧光光谱传感器、智能手环传感器等。
这些医疗传感器能够实时监控各种身体数据,提醒用户及时调整自身健康状况。
四、柔性传感器未来发展方向随着人们对智能硬件的需求越来越高,柔性传感器也将向更加智能化和集成化的方向发展。
未来,柔性传感器不仅可以广泛应用于机器人、医疗等领域,还可以向智能家居、无人驾驶等领域延伸。
航天器环境工程第26卷增刊112 SPACECRAFT ENVIRONMENT ENGINEERING 2009年12月柔性阵列式压力传感器的发展现状简介杨 敏,陈 洪,李明海(中国工程物理研究院总体工程研究所,绵阳 621900)摘要:文章在介绍柔性阵列式压力传感器工作原理的基础上,概述了其国内外发展现状。
着重介绍了美国Tekscan公司开发的基于矩阵的传感器技术和应用实例,以及中科院合肥智能机械研究所有关柔性传感器的研究现状、产品的性能指标等。
文章的工作旨在为层合结构预紧接触压力/间隙测量选择有效、可行的测量系统。
关键词:压力传感器;柔性阵列;接触压力测量中图分类号:V416.2 文献标识码:A1 引言物体间接触应力的测量与分析在许多行业的研究和发展中起着极其重要的作用,接触应力的理论与试验研究也一直是工程和力学的热门课题[1]。
由于接触应力的理论分析很难准确,定量地应用于实际问题也有难度, 因而研制设计一种能直接测定接触界面力学参数的装置,实时地测量2个物体在接触面上的压力和应力的分布信息具有重要的意义。
柔性阵列式压力传感器,可用于任意2个柔性或柔/刚接触面表面作用力的分布检测,一般为平面结构。
它不仅具有普通阵列式传感器的优点,还具有良好的柔韧性,可以自由弯曲甚至折叠,能够方便地对复杂表面形状的零件进行检测,广泛应用于接触式测量、无损检测、机器人、生物力学等领域[2]。
2 柔性阵列式压力传感器工作原理柔性阵列式压力传感器属于电阻式传感器,其工作原理与普通电阻式传感器基本相同。
即接触力作用在力敏电阻元件上,力敏电阻元件将物理量转化为电阻变化,通过变换电路又转换为电压变化从而得到相关的力信息[3]。
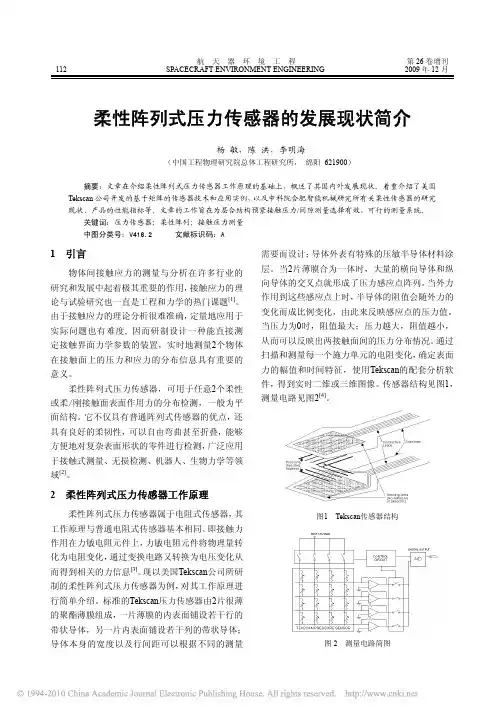
现以美国Tekscan公司所研制的柔性阵列式压力传感器为例,对其工作原理进行简单介绍。
标准的Tekscan压力传感器由2片很薄的聚酯薄膜组成,一片薄膜的内表面铺设若干行的带状导体,另一片内表面铺设若干列的带状导体;导体本身的宽度以及行间距可以根据不同的测量需要而设计;导体外表有特殊的压敏半导体材料涂层。
化工进展Chemical Industry and Engineering Progress2023 年第 42 卷第 10 期柔性可穿戴压阻式压力传感器研究进展徐娜,王国栋,陶亚楠(陕西科技大学轻工科学与工程学院,陕西 西安 710021)摘要:伴随着数字医疗与制造业的进步,灵活柔韧的柔性可穿戴设备可以和人体表面完全贴合,从而对人体运动及健康信号等进行监测,从而实现多种传感功能。
柔性可穿戴设备具有灵活性、体积可变、生物适应性好等优点,但仍然存在灵敏度低、检测范围有限、易受外界环境的干扰、可靠性低等问题。
在柔性可穿戴设备中,一个关键器件就是用于压力检测的柔性压力传感器。
在今后几年柔性可穿戴压力传感器会更加注重新型结构传感器的探索和整体高性能传感器的构建。
本文概述了近年来柔性压力传感器的研究进展,并就压力传感器种类、工作机理、设计原则及最新进展进行了说明。
通过近年来的文献重点对压阻式压力传感器在材料及器件设计等方面进行归纳整理与总结,并对压阻式压力传感器主要应用领域做了简单介绍。
从压阻式压力传感器的结构设计及今后应用的角度出发,概述了压阻式压力传感器的可靠性及未来面临的挑战。
关键词:压阻式压力传感器;结构设计;导电聚合物;工作机理;设计原则中图分类号:TP212 文献标志码:A 文章编号:1000-6613(2023)10-5259-13Flexible wearable piezoresistive pressure sensorsXU Na ,WANG Guodong ,TAO Yanan(College of Chemistry and Chemical Engineering, Shanxi University of Science & Technology,Xi’an 710021, Shaanxi, China)Abstract: Along with advances in digital healthcare and manufacturing, flexible and pliable wearable devices can fit perfectly with the surface of the human body to monitor human motion and health signals, etc ., and thus enabling a variety of sensing functions. Flexible wearable devices have the advantages of flexibility, variable volume and good biological adaptability, but there are still problems such as low sensitivity, limited detection range and low reliability vulnerable to interference from the external environment. A key device in flexible wearable devices is the flexible pressure sensor for pressure detection. In the next few years, flexible wearable pressure sensors will pay more attention to the exploration of new structural sensors and the overall construction of high-performance sensors. This paper provided an overview of the research progress of flexible pressure sensors in recent years, and explained the types of pressure sensors, their operating mechanisms, design principles and recent advances. The recent literature focuses on piezoresistive pressure sensors in terms of materials and device design were summarized and the main application areas of piezoresistive pressure sensors were briefly introduced. The reliability of piezoresistive pressure sensors and future challenges were outlined from the perspective of structural design and future applications of piezoresistive pressure sensors.综述与专论DOI :10.16085/j.issn.1000-6613.2022-2228收稿日期:2022-12-01;修改稿日期:2023-02-11。
基于神经网络方法的三维力柔性触觉传感器阵列解耦研究一、本文概述随着机器人技术的快速发展,对于机器人感知环境、实现精准操作的需求日益增强。
触觉传感器作为机器人感知外部环境的重要手段,其性能的提升对于机器人的智能化、精细化操作具有关键性作用。
其中,三维力柔性触觉传感器阵列由于其能够同时感知法向和切向的力信息,且具有柔性、可穿戴等特点,在机器人触觉感知领域具有广泛的应用前景。
然而,三维力柔性触觉传感器阵列的输出信号通常存在耦合现象,即不同方向的力信息相互干扰,影响了传感器的测量精度和稳定性。
因此,如何有效地实现三维力柔性触觉传感器阵列的解耦,成为了当前研究的热点和难点问题。
本文旨在研究基于神经网络方法的三维力柔性触觉传感器阵列解耦技术。
对三维力柔性触觉传感器阵列的工作原理和信号特性进行深入分析,明确解耦的重要性和必要性。
然后,结合神经网络强大的非线性映射能力和自学习能力,构建适用于三维力柔性触觉传感器阵列解耦的神经网络模型。
通过对模型的训练和优化,实现对传感器输出信号的精确解耦,提高传感器的测量精度和稳定性。
通过实验验证神经网络解耦方法的有效性,为三维力柔性触觉传感器阵列的实际应用提供理论和技术支持。
本文的研究不仅有助于推动机器人触觉感知技术的发展,还为其他领域中的多维传感器解耦问题提供了新的解决方案。
通过深入研究基于神经网络方法的三维力柔性触觉传感器阵列解耦技术,有望为未来的机器人技术发展和智能化应用奠定坚实的基础。
二、三维力柔性触觉传感器阵列基本原理三维力柔性触觉传感器阵列是一种能够同时感知并测量施加在其表面上的三维力(即法向力和两个正交切向力)的先进设备。
其基本原理基于柔性材料(如硅橡胶、聚酰亚胺等)的力学性能和传感器的电阻、电容或压电等物理特性的变化。
在力学层面,当外力作用于传感器表面时,柔性材料会发生形变,这种形变可以通过弹性理论来描述。
弹性理论提供了传感器受力与形变之间的定量关系,是理解传感器工作原理的基础。
可监测动脉血压波形的超声阵列柔性传感器刘皓,李斌,罗丹,牛鑫,刘璐(天津工业大学纺织科学与工程学院,天津300387)摘要:为了解决传统超声传感器硬度大而不易与皮肤贴合的缺陷,设计开发了一款可监测动脉血压波形的超声阵列柔性传感器。
通过将“S ”形可拉伸铜箔电极转印到Eco-flex 基底上,然后在铜箔电极上焊接1-3压电复合材料,最后用Eco-flex 封装,制备出一款柔性可拉伸的超声阵列传感器,同时研究了超声阵列柔性传感器的稳定性、重复性、轴向分辨率以及可拉伸性能。
结果表明:超声阵列柔性传感器的轴向分辨率能够达到330滋m ,电极的断裂伸长率可达76.56%,在经历拉伸、扭曲和弯折后仍能够恢复初始状态,能够对人体动脉血压波形持续监测,血压监测结果与商用血压计相比误差在2mm Hg 以内。
关键词:超声传感器;柔性传感器;血压监测中图分类号:TP212.6文献标志码:A文章编号:员远苑员原园圆源载(圆园23)园6原园园74原10收稿日期:2022-12-06基金项目:科技部国家重点研发计划“科技冬奥”重点专项(2019YFF0302100)通信作者:刘皓(1977—),男,博士,教授,博士生导师,主要研究方向为智能纺织品。
E-mail :*******************Ultrasonic array flexible sensor for monitoring arterial blood pressure waveformLIU Hao ,LI Bin ,LUO Dan ,NIU Xin ,LIU Lu(School of Textile Science and Engineering ,Tiangong University ,Tianjin 300387,China )Abstract :In order to solve the defects of traditional ultrasonic sensors袁which are rigid and not easy to skin adhesion袁anultrasonic array flexible sensor is designed and developed.By transferring the 野S冶shaped stretchy copper foil electrode to the Eco -flex substrate袁and then welding 1-3piezoelectric composite material on the copper foil electrode袁and finally packaging with Eco-flex袁a flexible stretchy ultrasonic array sensor is prepared.The sta鄄bility袁repeatability袁axial resolution and stretchinability of ultrasonic array flexible sensor are studied.The re鄄sults show that the axial resolution of the ultrasonic array flexible sensor can reach 330滋m袁and the elongation at break of the electrode can reach 76.56%袁which can still recover the initial state after stretching袁twisting and bending.It can continuously monitor human arterial blood pressure waveform袁and the error of blood pressuremonitoring results is less than 2mm Hg compared with that of commercial blood pressure monitors.Key words :ultrasonic sensors曰flexible sensors曰blood pressure monitoring随着生活水平的提高,人们对自身健康状况有了更高的要求。
基于敏感阵列的触觉传感器结构设计及仿真分析摘要触觉是生物体感知外部环境的重要手段,是仿生机器人研究的一个重要内容。
相比于视觉、听觉等其他感知形式,触觉能感知更多信息量,如接触力的大小、柔软性、硬度、弹性、粗糙度、温度和湿度等。
三维力触觉传感器,将在体育运动、医疗康复、机器人等领域发挥重要的作用。
本论文利用材料力学、有限元仿真、模式识别等学科的研究成果,从传感器结构设计的角度出发,研究了基于导电橡胶的三维力柔性触觉传感器的若干理论和技术问题,提出了一种新的三维力柔性触觉传感器模型。
本论文的主要研究内容如下:(1)利用有限元仿真技术,对基于二层双面节点对称交叉分布的柔性触觉阵列传感器结构进行仿真,建立传感器的三维力一电阻仿真数字模型。
(2)提出基于一种新的柔性触觉传感器N型微结构,建立相应的三维力-电阻数学模型,并利用有限元仿真进行模拟和结构优化。
该新型结构首先从结构上对三维力进行了优化,降低了原来高维、多参数传感器信号在实时、精确解耦方面的难度。
关键词:柔性触觉传感器;三维力结构设计; ANSYS仿真分析Design of The Structure Design and Simulation Analysis of Tactile Sensor Based on Sensitive ArrayAbstractTactile is an important sensing for the robots to perceive the external information,in particular,it’s an important research content of bionic robot.Cornered to the visual,auditory and other perceived forms,tactile reception can get more information:surface roughness,temperature flexibility and shape etc..Flexible three-dimensional force tactile sensor play an important role in sports,medical,rehabilitation,robotics and other study fields.This paper made full use of the scientific achievements in the fields of pattern recognition,material mechanics,finite element simulation.In the sensor structure design point of view,we studied some key theoretical and technical problems of the 3D flexible tactile sensor based on the conductive rubber.and present a new 3D force flexible tactile sensor model.The main research contents and innovations are as follows:(1)With finite element simulation,we simulated the structure of flexible tactile sensor array of two layers in symmetric cross distribution,establisheda 3D stress—resistance simulation model of the sensor.(2)Present a new flexible tactile sensor based on the N—type micro structure,established the 3D stress—resistance mathematical model,andsimulated and optimized with finite element simulation.The method decoupling the 3D stress from the structure,reduce the difficulty in decoupling of the high dimensional,multi parameter sensor signals.Keywords:Flexible tactile sensor ;3D force Structure;ANSYS Simulation目录引言......................................................................................................................... - 1 -第1章绪论.............................................................................................................. - 2 -1.1论文研究背景................................................................................................. - 2 -1.1.1研究背景.............................................................................................. - 2 -1.1.2基于敏感阵列的触觉传感器的发展趋势..................................................... - 4 -1.2 论文研究的主要内容 ...................................................................................... - 5 -1.3 论文研究的意义............................................................................................. - 5 -第2章有限元理论及超弹性模型 ................................................................................. - 6 -2.1 ANSYS有限元概述........................................................................................ - 6 -2.1.1几何模型和网络划分.............................................................................. - 6 -2.1.2多物理场.............................................................................................. - 6 -2.1.3流体动力学 .......................................................................................... - 6 -2.1.4 ANSYS工程应用.................................................................................. - 6 -2.2超弹性理论.................................................................................................... - 7 -2.2.1超弹性理论模型 .................................................................................... - 7 -2.3 传感器力学仿真方法 ...................................................................................... - 8 -第3章数学模型理论分析........................................................................................... - 9 -3.1 导电橡胶的导电机理 ...................................................................................... - 9 -3.2 并联电阻模型结构和原理.............................................................................. - 10 -3.2.1 模型结构........................................................................................... - 10 -3.3敏感单元分析............................................................................................... - 11 -3.3.1微结构............................................................................................... - 11 -3.3.2 阵列................................................................................................. - 12 -第4章ANSYS分析与结论....................................................................................... - 15 -4.1 静力学仿真 (15)4.1.1建模 (15)4.1.2ANSYS 有限元网格划分........................................................................ - 15-4.1.3 采用表面印记功能 (16)4.1.4 施加约束...........................................................................................................- 16-4.2仿真结果与分析 (17)总结与展望...............................................................................................................................-2 0-致谢................................................................................................................. - 22 -参考文献................................................................................................................. - 23 -附录B英文文献及其译文 (30)附录 B 主要参考文献的题录及摘要 (51)插图清单图1-1 传感器测试电路图 (2)图1-2 传感器示意图 (3)图1-3 装有传感器的机器手...................................................................................................4图3-1 电阻率随炭黑含量的变化图....................................................................................................9图3-2 传感器行列电阻示图. (10)图3-3 阵列的俯视图 (11)图3-3 微结构示意图 (12)图3-4 阵列示意图 (1)2图4-1 有限元模型 (1)5图4-2 网格划分.................................................................................................................. ...15图4-3 采用表面印记功能.....................................................................................................16图4-4 用fix support 约束表面.. (16)图4-5 X向受力载荷的形变图.............................................................................................17图4-6 Y向受力载荷的形变图 (18)图4-7 Z向受力载荷的形变图 (19)插表清单表2-1 材料的样品库清单 (12)表4-1 X向力受力情况对比表............................................................................................................22表4-2 Y向力受力情况对比表............................................................................................................23表4-3 Z向力受力情况对比表.. (24)引言触觉是指用分布于皮肤上的神经细胞感受来自外界的温度、湿度、压力、振动等感觉。
新型柔性传感器设计及其应用研究柔性传感器指的是一种柔性材料制成的传感器,在张力、压力、形变等方面具有灵活的应答能力,因此在许多领域中有广泛的应用。
新型柔性传感器设计及其应用研究成为当前科技研究中非常热门的领域,这篇文章将从传感器的设计与制造、材料特性分析、测试技术的研究等方面进行探讨。
一、传感器的设计与制造新型柔性传感器的设计与制造需要综合考虑传感器的灵敏度、可重复性、噪声特性等因素。
目前,柔性传感器的设计和制造主要包括三个步骤:材料选择、结构设计、制备、加工和测试等。
其中,材料选择是决定传感器性能的关键步骤,新型柔性传感器的材料选择包括了十分广泛的范围,例如:聚合物基复合材料、金属基复合材料、纳米材料等等。
在材料选择之后,还需要结合传感器的功能和需求,进行不同的结构设计和加工处理,最终实现传感器的制备和测试。
二、材料特性分析柔性传感器材料的特性是决定传感器性能的重要因素。
传感器材料主要分为有机和无机材料两种,无机材料具有高稳定性和高灵敏性,但材料本身较脆弱,加工难度较大;有机材料具有材料选型广泛、制备过程简单等优势,但稳定性与灵敏性相对较低。
在实际应用中,选择材料要综合考虑传感器的需要和性能需求,进行合理的材料选择与设计。
三、测试技术的研究新型柔性传感器的测试技术是保证其应用可靠性的关键因素之一。
研究人员在测试过程中主要研究了传感器的灵敏度、温度特性、噪声等方面的问题,开发了一系列测试方案,如:力学测试、电学测试、热力学测试等。
这些测试技术为新型柔性传感器的应用成功打下了坚实的基础。
四、新型柔性传感器的应用研究新型柔性传感器的应用范围十分广泛,可以应用于灵巧机器人、生物医学、智能家居等领域。
例如,在灵巧机器人领域,柔性传感器可以应用于机器人动作控制、传感器网络等方面,提升灵巧机器人的智能水平;在生物医学领域,应用于人体语音信号识别、脑机接口等方面,进一步提升生物医学诊断治疗效果。
综上所述,新型柔性传感器设计及其应用研究是当前科技研究领域中的一项十分重要的研究方向。