机械原理课件第2章机构的组成原理和机构类型综合
- 格式:ppt
- 大小:946.50 KB
- 文档页数:51


第二章 机构的组成原理和机构类型综合(3学时)一、教学目的和教学要求1、目的:使学生了解机构的组成以及机构具有确定运动条件,了解能表征机构运动情况的简单图形(即机构运动简图的画法),为对已有机构进行分析或创造新的机构提供条件。
本课程的研究对象主要是各种机构,为了对机构进行研究,显然首先需要知道机构是如何构成的?在什么条件下机构具有确定的运动?以及在设计新机构时或对已有的机构进行分析时如何把研究的机构用简单的图形表示出来? 2、教学要求1) 了解机构的组成、搞清楚运动副、运动链、约束和自由度等基本概念。
2) 能绘制常用机构的机构运动简图。
3) 能计算平面机构的自由度。
4) 对高副低代和平面机构的组成原理有所了解。
二、本章重点教学内容及教学难点1、重点:运动副、运动链等的概念,机构运动简图的绘制,机构具有确定运动的条件及机构自由度的计算。
2、难点:机构自由度的计算中有关虚约束的识别和处理问题(但不是教学重点),要求对虚约束有一个明确的概念,并对机构中存在虚约束的一些比较常见的情况有所了解;平面机构的组成原理、结构分类,以及高副低代。
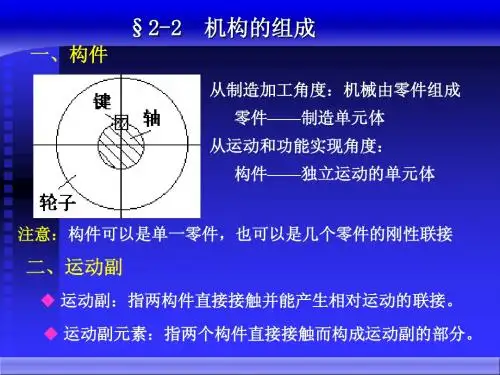
§2-1 机构的组成及运动简图一、构件与运动副1.名词解释:构件: 组成机构的每一个独立运动单元体。
运动副:两构件直接接触而又能产生一定形式的相对运动的连接。
运动副元素:参与接触而构成运动副的点、线、面。
运动副分类:按组成运动副的两构件间的相对运动是平面运动还是空间运动,分为平面运动副和空间运动副两类。
自由度:构件所具有的独立运动的数目(或确定构件位置的独立参变量的数目)。
作平面运动的自由构件具有三个自由度。
约束:对独立运动所加的限制。
两构件间约束的多少和约束的特点完全取决于运动副的形式。
2.各种平面运动副的约束特点:1)图2-1a 所示运动副,构件2沿x 轴和y 轴的两个相对移动受到约束,构件2只能绕垂直于xoy 平面的轴相对转动。
这种具有一个独立相对转动的运动副称为转动副。