机械设计基础教案:第9章例题 闵小琪 编.doc
- 格式:doc
- 大小:511.50 KB
- 文档页数:3
9-1 仔细观察自行车,写出下列各处采用什么联接,(1)车架各部分;(2)脚踏轴与曲拐;(3)曲拐与链轮;(4)曲拐与中轴;(5)车轮轴与车架。
答:(1)焊接;(2)螺纹联接;(3)成形联接;(4)成形联接或销联接;(5)螺纹联接 9-2 螺栓联接、螺柱联接、螺钉联接、紧定螺钉联接四种联接的结构特点有什么不同?各用于什么场合?答:1.螺栓联接 普通螺栓联接的通孔为过孔,加工精度低,被联接件不切制螺纹,用于能从被联接件两边进行装配的场合,使用不受被联接件材料的限制,构造简单,装拆方便,成本低,应用最广。
铰制孔螺栓联接,螺栓杆与孔之间紧密配合,有良好的承受横向载荷的能力和定位作用。
2.双头螺柱联接 双头螺柱的两端都有螺纹,其一端紧固地旋入被联接件之一的螺纹孔内,另一端与螺母旋合而将两被联接件联接。
用于被联接件之一太厚不便穿孔或受结构限制而不能用螺栓联接且需经常装拆的场合。
3.螺钉联接 不用螺母,直接将螺钉拧入被联接件之一的螺纹孔内,应用与双头螺栓联接相似,但不能用在经常装拆或受力太大的场合。
4.紧定螺钉联接 将紧定螺钉旋入一零件的螺纹孔中,并以其末端顶住另一零件的表面或嵌入相应的凹坑中,以固定两个零件的相对位置,并传递不大的力或扭矩。
9-3 在实际应用中,绝大多数螺纹联接都要预紧,预紧的目的是什么?答:预紧的目的是增加联接刚度、紧密性和提高防松能力。
9-4 某圆柱形压力容器的端盖采用8个M20的普通螺栓联接。
已知工作压力p=3 MPa ,螺栓位于D 0 = 280mm 的圆周上,试问该联接的紧密性是否满足要求?解:计算螺栓间距 9.10982800=⨯==ππZ t Dmm查表9-7,p=3 MPa ,t 0<4.5d=4.5×20=90mm ,因此,不能慢紧密性的要求。
9-5 某气缸的蒸汽压强p=1.5MPa ,气缸内径D=200mm ,。
气缸与气缸盖采用普通螺栓联接,螺栓分布在直径D 0 =300mm 的圆周上。
《机械设计基础》少学时教学内容(参考) 第 1 章绪论1. 了解机械的组成及机器、机构、构件和零件;2. 了解本课程的性质、任务、内容和学习方法。
:1. 掌握机械的基本组成。
2. 掌握机器、机械、机构、零件等概念。
3. 机器与机构的区别。
课堂讲授CAI 实物引言一、机械概述机械的特征机器、机构、构件和零件机械的分类二、本课程的内容、性质、任务本课程的内容本课程的性质本课程的任务本课程的学习方法作业布置第 2 章平面机构的结构分析1. 熟悉运动副及其分类,明确运动链和机构的区别。
2. 掌握平面机构运动简图的绘制方法。
3. 掌握平面机构自由度的计算方法,明确平面机构具有确定运动的条件。
:1. 机构及运动副的概念、绘制机构运动简图。
2. 自由度计算,虚约束。
课堂讲授CAI 实物2.1 机构的组成2.1.1 自由度 2.1.2 运动副及其分类2.2 平面机构运动简图2.2.1 运动副及构件的表示法 2.2.2 机构运动简图的绘制步骤2.2.3 绘制机构运动简图的步骤2.3 平面机构的自由度2.3.1 平面机构自由度的计算 2.3.2 机构具有确定运动的条件2.3.3 计算机构自由度注意的事项第 3 章 平面连杆机构1. 了解铰链四杆机构的基本类型及其演化。
2. 明确四杆机构的曲柄存在条件。
3. 熟悉铰链四杆机构压力角、传动角、行程速度变化系数和死点位置等基本概念。
4. 掌握平面四杆机构设计的图解法(按给定的连杆长度和连杆的两个位置设计四杆机构、 按给定的行程速度变化系数设计四杆机构)。
:1. 四杆机构的曲柄存在条件。
2. 压力角、传动角、行程速度变化系数和死点位置。
3. 平面四杆机构设计的图解法课堂讲授 CAI 实物作业布置第 4 章1. 了解凸轮机构的特点,能按运动规律绘制S-中 曲线2. 掌握图解法设计凸轮轮廓,了解凸轮机构的自锁、压力角与基圆半径的关系:1. 常用从动件运动规律的特点,刚性冲击,柔性冲击, S-中 曲线绘制2. 凸轮轮廓设计原理—反转法,自锁、压力角与基圆半径的概念课堂讲授 CAI 实物4.1 概述4.1.1 凸轮机构的应用及特点 4.1.2 凸轮机构类型 4.2 常用从动件运动规律4.2.1 凸轮与从动件运动关系 4.2.2 常用从动件运动规律 4.3 图解法设计凸轮轮廓4.3.1 反转法原理 4.3.2 图解法 4.4 凸轮机构基本尺寸的确定3.1 铰链四杆机构的基本类型及其演化 3.1.1 铰链四杆机构的基本类型 3.2 平面四杆机构的特性 3.2.1 铰链四杆机构曲柄存在条件 3.2.3 压力角和传动角 3.3 图解法设计平面四杆机构3.3.1 按照给定的行程速比系数设计四杆机构 3.3.2 按给定连杆位置设计四杆机构 3.3.3 按照给定两连架杆对应位置设计四杆 机构 3.1.2 平面四杆机构的演化急回特性 死点位置3.2.2 3.2.4 作业布置4.4.1 压力角的确定 4.4.2 基圆半径的确定4.4.3 滚子半径的确定作业布置1. 了解棘轮机构、槽轮机构的工作原理、类型、特点和应用。

《机械设计基础》电子教案第九章轮系课题机械设计基础概论授课日期授课类型理论课课时教学目标了解轮系及其分类熟悉定轴轮系的传动比计算熟悉周转轮系的传动比计算了解混合轮系了解轮系的应用教学内容轮系及其分类定轴轮系的传动比计算周转轮系的传动比计算混合轮系轮系的应用教学方法教师讲解与学生领悟、练习相结合。
教学资源多媒体教室,多媒体课件教学步骤及主要内容备注教学环节教学内容讲授新知第一节轮系及其分类一、轮系的分类根据轮系传动时各齿轮的几何轴线在空间的相互位置是否固定,可分为定轴轮系和周转轮系两大类。
(一)定轴轮系(二)周转轮系二、轮系的应用在实际机械传动中,轮系的应用非常广泛,轮系的应用场合有:(1(2(3(4第二节定轴轮系的传动比计算一、定轴轮系的传动比大小的计算二、定轴轮系中主、从动轮转向的确定表示轮系中主、从动轮转向的方法有两种:1.传动比的正负号表示方法传动比的正负号表示主、从动轮的转向关系,并规定当主、从动轮转向相同时,传动比为正号,相反则为负号。
2.用箭头表示各轮的转向第三节周转轮系的传动比计算由相对运动原理可知,对整个行星轮系加上一个与转臂的转速大小相等而方向相反的公共转速(-n H)后,轮系中各构件之间的相对运动关系并不因之改变,但此时转臂变为固定不动,齿轮2的轴线O2也随之固定,行星轮系转化为定轴轮系。
这种经转化得到的假想定轴轮系,称为该行星轮个系的转化轮系,转化轮系的传动比可用定轴轮系传动比的计算公式求得。
第四节混合轮系复合齿轮系:既包含定轴轮系又包含行星轮系的齿轮系。
一、复合齿轮系的传动比计算(112)分别列出定轴轮系部分和周转轮系部分的传动比公式,并3)找出定轴轮系部分与周转轮系部分之间的运动关系,并联立求解即可求出混合轮系中两轮之间的传动比(2)复合齿轮系的传动比计算。
第五节轮系的应用一、实现分路传动利用齿轮系可使一个主动轴带动若干从动轴同时转动,将运动从不同的传动路线传动给执行机构的特点可实现机构的分路传动。
9.4 轴的设计举例
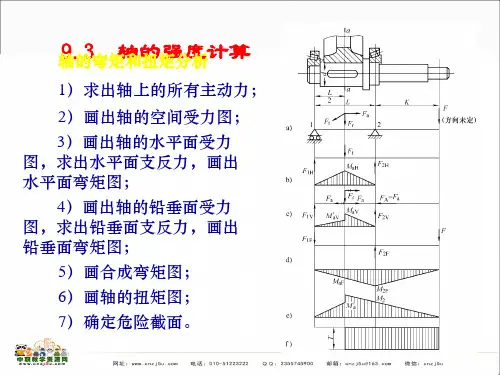
例9-1 如图9-20所示是单级斜齿轮减速器的传动简图和从动轴的结构简图,已知从动轴传递的功率4P kW =,转速130/min n r =,齿轮宽度70b mm =,齿数60z =,模数5m mm =,螺旋角12β=o ,试确定该轴主要结构尺寸,并校核该轴的强度。
(a ) (b)
图9-20 单级斜齿轮减速器和从动轴的结构简图
(a )单级斜齿轮减速器 (b )从动轴的结构简图
解:计算项目及结果见表9-5
表9-5 计算项目及结果
计算项目
主要结果
一、选择轴的材料,确定许用应力
选用轴的材料为45钢,调质处理,查表9-1可知
650b a MP σ=,用插值法查表9-3可知1[]60a MP σ-=
二、按扭转强度估算轴的最小直径
图示减速器低速轴为转轴,从结构看与联轴器相接的输出端轴径应最小。
最小轴径为
d ≥633
3
9.55100.2[]p p
C n n
τ⨯⨯=
查表9-2可得,45钢C=118,则
d ≥3
4
11836.78130
mm mm = 同时考虑键槽的影响,取40d mm =
三、齿轮上作用力的计算
齿轮所受的转矩为
6
6449.55109.551029410130
p T N m N mm n =⨯=⨯=⨯g g
齿轮作用力为
圆周力3
22294101960300
t
F N N d τ⨯⨯=
== 径向力tan /cos 1960tan 20/cos12729r r n F F a N N β===o o
轴向力tan121960tan12417a
a F F N N ===o o
650b a MP σ= 1[]60a MP σ-=
40d mm =
329410.T N mm =⨯
1960t F N = 729r F N = 417a F N
=
d ≥33
1199190
320.1[]0.160
eC M mm mm σ--==⨯
考虑该截面键槽的影响,直径增加工5%
32 1.0533.92c d mm =⨯=
结构设计确定为52mm ,所以强度足够 六、绘制轴的零件工作图。
略
图9-21 轴系受力及弯矩、转矩图。