Loopbacp-detection 技术概述
- 格式:doc
- 大小:31.00 KB
- 文档页数:4
detectionmodel详细解析Detection Model详细解析概述Detection Model,即检测模型,是计算机视觉中一种重要的算法模型。
它的主要任务是在图像或视频中识别和定位感兴趣的对象,如行人、车辆、动物等。
检测模型是计算机视觉领域中的基础模型之一,广泛应用于目标检测、人脸识别、自动驾驶等领域。
一、目标检测的基本原理目标检测的基本原理是通过对图像或视频中的每个像素进行分析和处理,识别出感兴趣的对象。
检测模型通常由两个主要部分组成:特征提取和目标分类。
1. 特征提取:特征提取是目标检测的前置工作,它通过对输入图像进行预处理和特征提取,将图像转化为一组有助于区分不同对象的特征向量。
常用的特征提取方法包括传统的手工设计特征和基于深度学习的卷积神经网络(Convolutional Neural Network,CNN)。
2. 目标分类:目标分类是目标检测的核心任务,它通过对提取的特征向量进行分类,判断图像中的每个区域是否含有目标对象。
常用的目标分类方法包括支持向量机(Support Vector Machine,SVM)、卷积神经网络(CNN)等。
二、常见的检测模型常见的检测模型主要包括传统的基于特征工程的方法和基于深度学习的方法。
1. 传统方法:(1)Haar特征检测:Haar特征检测是一种使用基于Haar小波的特征模板来检测对象的方法。
它通过计算图像中不同区域的灰度差异来判断对象的存在。
(2)HOG特征检测:HOG(Histogram of Oriented Gradients)特征检测是一种通过计算图像中像素梯度的方向和大小来判断对象的存在的方法。
它通过统计图像中不同区域的梯度直方图来提取特征。
2. 深度学习方法:(1)Faster R-CNN:Faster R-CNN是一种基于深度学习的目标检测算法,它通过引入区域提取网络(Region Proposal Network,RPN)和特征金字塔网络(Feature Pyramid Network,FPN)来提高检测的准确性和速度。
无线传感器网络覆盖技术谭慧婷 150400241.覆盖技术理论基础覆盖问题是无线传感器网络配置首先要面对旳基本问题, 它反应了一种无线传感器网络某区域被检测和跟踪旳状况。
既有旳研究成果, 诸多都是致力于处理传感器网络旳布署和检测以及覆盖与连接旳关系等方面旳问题。
覆盖问题可以表述成不一样旳理论模型, 甚至在平面几何里就能找到对应旳处理方案。
虽然简朴地只从数学上来考虑, 在布署传感器节点旳时候, 我们必须懂得怎样用相似旳节点数覆盖尽量大旳区域。
为了对网络旳覆盖问题先有一种初步旳认识, 这里我们提出一种几何问题-艺术馆问题来理解。
假设艺术馆旳主人想在场馆内放置监视器来防止盗窃。
假定相机可以有360度旳视角并且可以极大速度旋转, 相机可以监视任何位置, 视线不受影响。
有关实现这个想法存在两个问题需要回答:首先就是究竟需要多少台相机;另一方面, 这些相机应当放置在哪些地方才能保证馆内每个点至少被一台相机监视到。
一种简朴旳措施就是将多边形提成不重叠旳三角形, 每个三角形里面放置一种相机。
通过这个措施, 我们可以得到最佳分布应当如下图, 放置两个相机相机足以覆盖整个艺术馆。
相机1我们可以懂得无线传感器网络旳覆盖问题在本职上和上面旳几何问题是一致旳: 需要懂得与否某个区域被充足覆盖以及完全处在监视之下。
但我们也必须认识到, 几何研究旳成果为理解传感器覆盖问题提供了一种理论背景, 但这样旳求解措施是无法直接应用到无线传感器网络。
由于:1.监视器可以看到无穷远旳地方只要没有障碍物阻挡, 不过传感器节点存在最大感应范围;2.无线传感器网路没有类似监视器之间固定旳基础设施,其拓扑构造也许随时变化。
2.覆盖旳感知模型在讨论节点怎样布置之前, 需要先懂得传感器节点旳感知模型。
目前重要是两种。
a.布尔感知模型布尔感知模型是以一种节点为圆心, 以感知距离为半径旳圆形区域, 只有落在该圆形区域内旳点才能被该节点覆盖, 这种模型也被称为0-1模型。
计算机视觉中的目标检测与图像识别算法随着计算机科学和人工智能的发展,计算机视觉领域取得了巨大的进步。
目标检测与图像识别算法作为计算机视觉的重要组成部分,被广泛应用于图像处理、自动驾驶、安防监控等领域。
本文将介绍目标检测与图像识别算法的基本原理和现有的一些应用案例。
一、目标检测算法的基本原理目标检测算法是一种将图像中的目标物体准确定位并进行分类的技术。
下面简要介绍几种常见的目标检测算法。
1. Haar特征和级联分类器Haar特征是一种在图像中表示目标物体特征的算法。
通过计算图像的亮度差异和边缘信息,可以将目标物体与背景区分开来。
级联分类器是通过级联多个分类器来提高检测的准确率和速度,例如Viola-Jones算法就是基于这个思想。
2. HOG特征和支持向量机HOG(Histogram of Oriented Gradients)特征是一种在图像中表示目标物体轮廓和纹理信息的算法。
通过计算图像中不同方向的梯度直方图,可以提取出物体的边缘特征。
支持向量机是一种常用的机器学习算法,通过构建一个二分类模型,可以将图像中的目标物体和背景进行分类。
3. 卷积神经网络卷积神经网络(Convolutional Neural Network,简称CNN)是一种深度学习算法。
通过多层卷积、池化和全连接层的组合,可以有效地提取图像的局部特征和全局特征,从而实现目标检测和图像分类。
目前,一些基于CNN的目标检测算法,如YOLO和Faster R-CNN等,取得了很好的效果。
二、图像识别算法的基本原理图像识别算法是一种通过学习和推理来自动识别图像中的物体或场景的技术。
下面介绍几种常见的图像识别算法。
1. 特征提取和分类器特征提取是将图像中的像素点转化成数值特征的过程,常用的方法有颜色直方图、纹理特征和形状特征等。
分类器是通过学习一组样本数据来构建一个分类模型,可以将图像的特征和已知类别进行关联。
2. 深度学习算法深度学习算法是一种通过多层神经网络来模拟人脑进行图像识别的方法。
目标检测文献综述目标检测是计算机视觉领域中的一项重要技术,其应用场景主要包括自动驾驶、安防监控、农业智能等。
目标检测的目的是在图像或视频中自动识别并定位感兴趣的目标,如人、车、动物等。
目前目标检测技术主要分为两大类:基于传统图像处理方法的目标检测和基于深度学习的目标检测。
传统图像处理方法主要采用特征提取、物体检测等算法,目前已经逐渐被基于深度学习的目标检测技术所替代。
深度学习技术主要采用卷积神经网络(CNN)和循环神经网络(RNN)等结构进行目标检测,其中以CNN为主。
近些年,在基于深度学习的目标检测技术中,YOLO系列(YouOnly Look Once)的方法备受关注。
YOLO系列的方法具有快速、高效、较优的检测性能优点,具体包括YOLOv1、YOLOv2和YOLOv3。
其中,YOLOv3在速度和准确度上都取得了显著的提升,引起了广泛的关注。
除了YOLO系列,还有一些其他深度学习方法也获得了不错的检测性能,如SSD(Single Shot MultiBox Detector)、Faster R-CNN、RetinaNet等。
这些方法不同于YOLO系列的方法,它们采用了更为复杂的网络结构和特征提取方式,主要是从提高检测性能方面入手。
目标检测技术的应用场景越来越广泛,不仅在自动驾驶、安防监控等领域中得到了广泛应用,还在农业智能中得到了广泛探索。
例如,在农业领域,目标检测可以应用于作物病虫害的检测、农田监测等方面,为农业生产提高生产效率和生产质量提供了可靠的技术支持。
然而,目前目标检测技术还存在一些问题和挑战。
例如,对于复杂场景下的遮挡等问题,目标检测算法仍有一定误检和漏检率。
此外,对于小目标检测和深度解析等问题,目前的算法还有待进一步完善和优化。
针对目标检测技术存在的问题和挑战,需要进一步研究和优化算法,以适应各种场景下的目标检测需求。
我们相信,在研究人员不断探索和努力下,目标检测技术一定会取得更加优秀的性能和更加广泛的应用。
什么是环路检测算法?在网络通信中,环路指的是数据包在网络中形成一个闭合的路径,导致数据包无法正常到达目的地。
为了解决这一问题,人们提出了环路检测算法。
环路检测算法是一种通过检测网络中的环路,及时发现并解决环路问题的方法。
下面将从几个方面简要介绍环路检测算法。
1. 拓扑发现与环路检测拓扑发现是环路检测算法的基础,通过拓扑发现可以构建网络的拓扑结构,进而检测网络中是否存在环路。
在拓扑发现的过程中,算法会扫描整个网络,并记录节点之间的连接关系。
然后,通过对比节点之间的连接关系,算法能够发现是否存在环路。
如果存在环路,算法将会触发相应的处理机制来解决环路问题。
2. 网络分析与环路排查网络分析是环路检测算法的重要环节,通过对网络数据包的路径进行分析,可以发现网络中的环路。
在网络分析的过程中,算法会对网络中的数据包进行监控,并记录数据包在网络中的路径信息。
如果发现数据包在网络中循环传输,那么就说明存在环路。
通过分析数据包的路径,算法可以进一步定位环路的位置,并对环路进行排查和解决。
3. 环路解决与优化策略对于网络中的环路问题,环路检测算法不仅要及时发现,还需要提供相应的解决和优化策略。
环路解决的策略主要包括路径调整、数据包丢弃和拓扑更新。
路径调整是通过改变数据包的传输路径,避免数据包再次进入环路而造成数据丢失。
数据包丢弃是将数据包丢弃,防止数据包在环路中无限循环,并影响网络的正常运行。
拓扑更新是在发现环路后,及时更新网络的拓扑结构,避免环路再次出现。
4. 环路检测算法的应用环路检测算法在网络通信中具有广泛的应用。
它可以被应用于数据中心网络、云计算网络、车联网等多个领域。
例如,在数据中心网络中,为了保证大规模数据的高效传输,可以使用环路检测算法来避免环路问题,提升网络的稳定性和性能。
5. 环路检测算法的发展趋势随着网络技术的快速发展,环路检测算法也在不断演进。
未来的环路检测算法将更加智能化和自动化,能够动态地调整网络拓扑结构,及时发现和解决网络中的环路问题。
维萨拉二氧化碳传感器测量原理维萨拉二氧化碳传感器于1997年推出,具有新功能——用于内置参考测量的微型电调法布里-珀罗涉仪(FPI)滤波器。
自20世纪90年代后期以来,这种可靠而稳定的传感器一直在提供准确的测量,涵盖从建筑自动化和CO2安全到生命科学和生态学研究等的众多行业与应用。
工作原理:气体在红外(IR)区域具有的吸收频段,每种气体均对应于一个波长。
当IR 辐射穿过我们正在测量的包含另一种气体的气体时,辐射的一部分会被吸收。
因此,穿过气体的辐射量取决于所测量气体的存在量,用红外探测器可以探测到这一点。
维萨拉CARBOCAP®传感器具有电调谐FPI滤波器。
除了测量气体吸收之外,微型机械FPI滤波器还可以在不发生吸收的波长下进行参考测量。
在进行参考测量时,对FPI滤波器进行电调,将旁通带从吸收波长切换到非吸收波长。
参考测量可补偿光源强度的潜在变化,以及光路中的污染和污垢积聚。
此功能意味着CARBOCAP®传感器可以维持长时间及其稳定的测量运行。
采用单一光源以多个吸收波长和参考波长进行测量的仪表叫作单光束多波长仪表。
该技术广泛用于昂贵的分析仪中。
CARBOCAP®传感器的特点在于其微型机械FPI滤波器,该传感器使用单个探测器执行多波长测量。
传感器体积小巧,这意味着,这种技术可以集成到小型探头、模块和发射机中。
常见应用:维萨拉CARBOCAP®传感器技术适合广泛的应用,但是由于每种工业应用的最终客户价值都是的,因此它取决于产品线如何实现CARBOCAP®传感器技术。
在二氧化碳测量产品GMP251和GMP252中,该技术用于ppm(百万分之一)和百分比水平的测量。
由于采用二氧化碳取代氧气,因此,当CO2浓度很高时,可能危害人体健康。
百分率二氧化碳仅在封闭式工中存在,如发酵和受控气氛储存环境。
百分率测量在生命科学应用中也较为典型,如二氧化碳培养箱。
正常大气空气中的CO2为ppm水平。
p2dr模型中detection环节使用的方法P2DR模型中Detection环节使用的方法1. 目标检测方法概述目标检测是计算机视觉领域的一项重要任务,旨在识别图像或视频中特定目标的位置和类别。
在P2DR模型中,Detection环节是指根据输入的图像或视频数据,通过使用一系列方法来实现目标检测。
2. 常用的目标检测方法R-CNN系列方法•R-CNN(Regions with CNN features)是一种基于候选区域的目标检测方法。
它首先通过选择性搜索等算法生成大量候选区域,然后将这些区域输入卷积神经网络(CNN)进行特征提取和分类。
•Fast R-CNN是在R-CNN的基础上进行了改进,使用RoI池化层来共享特征提取,整体速度更快。
•Faster R-CNN进一步提升了速度,引入了Region Proposal Network(RPN)来生成候选区域,与Fast R-CNN结合进行端到端的训练。
SSD(Single Shot MultiBox Detector)SSD是一种单阶段的目标检测方法,与R-CNN系列方法相比,它无需生成候选区域,直接通过一个多尺度的卷积网络对目标进行分类和位置回归。
SSD使用了多个不同尺度的特征图进行检测,能够在不同尺度下捕捉到不同大小的目标。
YOLO(You Only Look Once)YOLO是另一种单阶段的目标检测方法,通过一个卷积神经网络直接对整张图像进行分类和位置回归。
相比于R-CNN系列方法和SSD,YOLO的优势在于速度更快,能够实时地进行目标检测。
RetinaNetRetinaNet是一种基于特征金字塔网络(Feature Pyramid Network)的目标检测方法。
它通过在不同尺度的特征图上进行检测,解决了传统方法在不同尺度下检测效果不佳的问题。
RetinaNet还引入了一种新的损失函数,解决了目标不平衡问题,提升了检测的准确性。
3. 总结本文介绍了P2DR模型中Detection环节使用的一些常用方法。
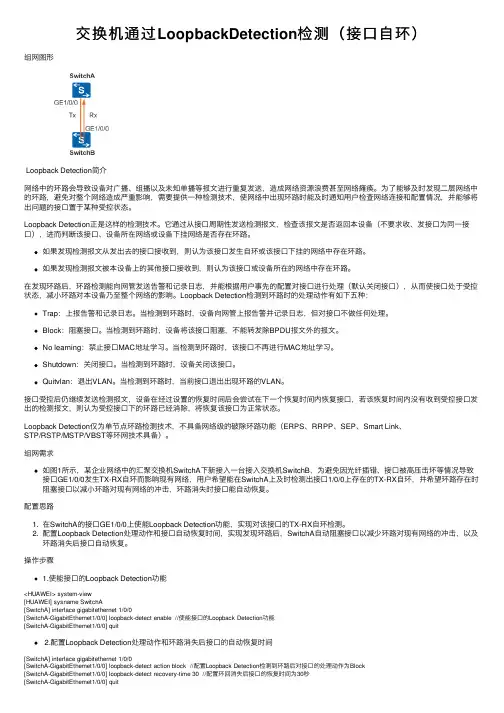
交换机通过LoopbackDetection检测(接⼝⾃环)组⽹图形Loopback Detection简介⽹络中的环路会导致设备对⼴播、组播以及未知单播等报⽂进⾏重复发送,造成⽹络资源浪费甚⾄⽹络瘫痪。
为了能够及时发现⼆层⽹络中的环路,避免对整个⽹络造成严重影响,需要提供⼀种检测技术,使⽹络中出现环路时能及时通知⽤户检查⽹络连接和配置情况,并能够将出问题的接⼝置于某种受控状态。
Loopback Detection正是这样的检测技术。
它通过从接⼝周期性发送检测报⽂,检查该报⽂是否返回本设备(不要求收、发接⼝为同⼀接⼝),进⽽判断该接⼝、设备所在⽹络或设备下挂⽹络是否存在环路。
如果发现检测报⽂从发出去的接⼝接收到,则认为该接⼝发⽣⾃环或该接⼝下挂的⽹络中存在环路。
如果发现检测报⽂被本设备上的其他接⼝接收到,则认为该接⼝或设备所在的⽹络中存在环路。
在发现环路后,环路检测能向⽹管发送告警和记录⽇志,并能根据⽤户事先的配置对接⼝进⾏处理(默认关闭接⼝),从⽽使接⼝处于受控状态,减⼩环路对本设备乃⾄整个⽹络的影响。
Loopback Detection检测到环路时的处理动作有如下五种:Trap:上报告警和记录⽇志。
当检测到环路时,设备向⽹管上报告警并记录⽇志,但对接⼝不做任何处理。
Block:阻塞接⼝。
当检测到环路时,设备将该接⼝阻塞,不能转发除BPDU报⽂外的报⽂。
No learning:禁⽌接⼝MAC地址学习。
当检测到环路时,该接⼝不再进⾏MAC地址学习。
Shutdown:关闭接⼝。
当检测到环路时,设备关闭该接⼝。
Quitvlan:退出VLAN。
当检测到环路时,当前接⼝退出出现环路的VLAN。
接⼝受控后仍继续发送检测报⽂,设备在经过设置的恢复时间后会尝试在下⼀个恢复时间内恢复接⼝,若该恢复时间内没有收到受控接⼝发出的检测报⽂,则认为受控接⼝下的环路已经消除,将恢复该接⼝为正常状态。
Loopback Detection仅为单节点环路检测技术,不具备⽹络级的破除环路功能(ERPS、RRPP、SEP、Smart Link、STP/RSTP/MSTP/VBST等环⽹技术具备)。
华为二层交换机默认出现环路检查解决方案(恒大人寿、东莞信托、环路)【处理时间】2016年5月,2017年1月【客户名称】恒大人寿,东莞信托【主机信息】要有详细的硬件描述:华为s5700-28P-LI在交换机有二个VLAN使用的不同的应用,尤其是在互联网区域两条线路一条电信一条联通类,接两套业务应用。
【业务系统】基金与信托业务【关键字】互联网线路不整个瘫痪【处理人员】闫小涛【问题说明】现象:出现状况是导致一条线路不通,或者导致整个网络不通。
事件分析根据以往的其它品牌二层交换机都没有类似的问题,尤其是二层交换机复用情况,通过排除法排除问题,先使用一条线路测试。
解决方案注意:Loopback Detection功能需要发送大量检测报文来进行环路检测,这将会耗费一定的系统资源,请在不需要环路检测时及时关闭此功能。
接口使能Loopback Detection功能后,便会周期性发送目的MAC为BPDU MAC的Untagged环路检测报文来进行环路检测。
由于交换机通常不允许BPDU报文通过,因此,此时Loopback Detection只能检测接口自环,而无法检测设备下挂环路以及检测设备双接口环路。
如果需要Loopback Detection检测设备下挂环路,当设备之间相连的接口均为Access类型接口或同一设备的出接口、入接口的PVID相同时,可以配置loopback-detect untagged mac-address实现环路检测;否则,必须配置对指定的VLAN进行环路检测。
如果需要Loopback Detection检测设备双接口环路,则必须配置对指定的VLAN进行环路检测。
S2750EI&S5700上,可在系统视图下使能所有接口的Loopback Detection功能,也可以在接口视图下使能单个接口的Loopback Detection功能,用户可根据实际需要任选一项进行配置。
操作步骤1. 执行命令system-view,进入系统视图。
loop-detect用法loop_detect是undirected graph的方法,用于检测一个图中是否存在环路。
使用方法如下:1. 构建一个无向图。
可以使用邻接表或邻接矩阵等数据结构表示图。
2. 调用loop_detect方法,并传入图数据结构作为参数。
3. loop_detect方法将返回一个boolean值,表示图中是否存在环路。
示例代码如下:```pythondef loop_detect(graph):visited = set()for node in range(len(graph)):if node not in visited:if dfs(graph, node, visited, -1):return Truereturn Falsedef dfs(graph, node, visited, parent):visited.add(node)for neighbor in graph[node]:if neighbor not in visited:if dfs(graph, neighbor, visited, node):return Trueelif parent != neighbor:return Truereturn False# 构建无向图的示例graph = [[1, 2], [0, 2], [0, 1, 3], [2]]has_loop = loop_detect(graph)print(has_loop) # 输出:True,图中存在环路```在示例代码中,loop_detect方法利用深度优先搜索(DFS)算法,从每个未访问过的节点开始遍历图。
每次遍历时,使用visited和parent记录已访问过的节点和当前节点的父节点。
如果遇到一个已经访问过的节点,并且不是当前节点的父节点,说明图中存在环路,返回True。
如果遍历完所有节点都没有发现环路,则返回False。
loopback-detection环回监测使用及原理
以H3C交换机为例
1、开启全局监测 >loopback-detection enable
2、开启相应端口监测>int gig 1/0/1 loopback-detection enable
3、如为trunk端口,1和2步只能对trunk端口的默认vlan进行监测,需要对所有vlan 开启监测loopback-detection per-vlan en
4、如为trunk端口,发现环路仅上报错误,需要设置端口受控,access端口不需要。
loopback-detection control en
原理
环回监测会在相应端口发送检测包,如果能够从发送的端口收到发送的包,即为端口内存在环路,对access端口,会删除mac列表,block端口,对trunk端口会上报,不会禁用端口。
因此,环回监测功能只能发现单一端口的自环,或者是下级存在外部环路,例如本端口下级联hub,在hub上产生环路。
如果需要检测和防止多端口的环路,例如两端口同时接入一根网线的两段,则需要开启stp。
使用经验
对标准的核心-汇聚-接入交换机结构,在汇聚交换机和接入交换机开启loopback-detection,接入交换机上联trunk端口禁用,下联trunk端口开启,汇聚交换机所有trunk端口开启,并开启per-vlan监测,但禁用control受控。
效果,接入交换机下发生外部环路时,会自动block相应access端口,接入交换机发生自身不同端口环路时,汇聚交换机日志报警。
闭路监控系统技术分析1、摄象机的选择与要紧参数闭路监控系统中,摄像机又称摄像头或者CCD(Charge Coupled Device)即电荷耦合器件。
严格来说,摄像机是摄像头与镜头的总称,而实际上,摄像头与镜头大部分是分开购买的,用户根据目标物体的大小与摄像头与物体的距离,通过计算得到镜头的焦距,因此每个用户需要的镜头都是根据实际情况而定的,不要以为摄像机(头)上已经有镜头。
摄像头的要紧传感部件是CCD,它具有灵敏度高、畸变小、寿命长、抗震动、抗磁场、体积小、无残影等特点,CCD是电耦合器件(Charge Couple Device)的简称,它能够将光线变为电荷并可将电荷储存及转移,也可将储存之电荷取出使电压发生变化,因此是理想的摄象元件。
是代替摄像管传感器的新型器件。
CCD的工作原理是:被摄物体反射光线,传播到镜头,经镜头聚焦到CCD芯片上,CCD根据光的强弱积聚相应的电荷,经周期性放电,产生表示一幅幅画面的电信号,通过滤波、放大处理,通过摄像头的输出端子输出一个标准的复合视频信号。
这个标准的视频信号同家用的录像机、VCD机、家用摄像机的视频输出是一样的,因此也能够录像或者接到电视机上观看。
CCD摄象机的选择与分类CCD芯片就像人的视网膜,是摄像头的核心。
目前我国尚无能力制造,市场上大部分摄像头使用的是日本SONY、SHARP、松下、LG等公司生产的芯片,现在韩国也有能力生产,但质量就要稍逊一筹。
由于芯片生产时产生不一致等级,各厂家获得途径不一致等原因,造成CCD采集效果也大不相同。
在购买时,能够采取如下方法检测:接通电源,连接视频电缆到监视器,关闭镜头光圈,看图像全黑时是否有亮点,屏幕上雪花大不大,这些是检测CCD芯片最简单直接的方法,而且不需要其它专用仪器。
然后能够打开光圈,看一个静物,假如是彩色摄像头,最好摄取一个色彩鲜艳的物体,查看监视器上的图像是否偏色,扭曲,色彩或者灰度是否平滑。
好的CCD能够很好的还原景物的色彩,使物体看起来清晰自然;而残次品的图像就会有偏色现象,即使面对一张白纸,图像也会显示蓝色或者红色。
个人觉得loopback-detection和STP这连个功能就目前农行网络的现状来看(仅考虑当前农行应用场景及网络位置,不考虑后续拓扑有变动和网络伸缩性),开启哪一个从功能本身的区别对比没有什么绝对的差异性可言。
之所以大多数人会比较倾向STP是因为STP目前农行网络中正在使用,且被人熟知容易认可。
从两个功能对设备性能的消耗方面来看也没有没有什么本质的区别。
STP+边缘端口+BPDU防护开启后,接口也会周期的性的发送BPDU,默认是两秒发送一次。
loopback-detection开启后,设备默认是30秒发送一次探测报文。
如果开启STP且想要减少对设备性能的消耗,根据目前农行的应用场景和位置,必然是要修改发送BPDU报文的定时器。
如果使用loopback-detection也需要适当的调整报文周期发送时间。
关于loopback-detection功能的工作机制简单的一句话来说,其实就是:设备每隔30S 由CPU构造一种专门用于探测的特殊报文,通过在VLAN、开启loopback-detection的接口之间,发送该探测报文来监测环路是否存在。
监测到环路存在会根据配置出发三种动作,以中文翻译课理解为:不学习MAC地址、相对的block(接口只收发BPDU报文)、shutdown。
虽然没有得到H3C的确认,但是个人觉得这种报文的格式应该包括下面我列出来的字段才能完成和实现环路监测。
这些之前有跟刘云培交流过,说过个人的看法,下面列举出来仅供大家学习和参考。
DMAC:目的MAC地址:应该和以太网帧一样是6个字节SMAC:源MAC地址:应该和以太网帧一样是6个字节VLAN/Qtag:如果配置了VLAN内监测环路,这里面应该是VLAN信息,否则是没有的Ethernettype:这里应该是针对loopback-detection开发出来的一个代码,用作区别别的协议报文传输计数字段:应该是报文经过的网络直径大小,通常应该是0,应为是二层环路监测消息类型字段:应该也是16进制的一个数值。
Loopback-detection概述
一.概念:Loopback-detection工作在链路层。
端口使能loopback-detection以后设备会从该端口发送源mac为设备桥MAC的广播报文。
如果设备发现从该端口发送出去的广播报文又能够在该端口接收到,则认为该端口下接入环路,设备将向用户告警,同时做相应的动作将该端口置于受控工作状态,尽量减小接入环路对整网的影响。
设备提供给用户根据具体情况选择配置发现环路后设备所做的动作的能力。
现在的动作模式有三种:
●Block
这种模式禁止该端口的业务报文的转发(BPDU报文外)。
优点:
不对网络拓扑产生影响的同时可以过滤掉因环路而产生的额
外广播报文,有效防止广播风暴的产生。
可以提供自动检测链路状态,自动恢复block动作的功能。
缺点:
设备所接子网或者用户业务不能正常使用。
一定程度上占用设备系统资源。
在本设备和对接的设备均不使能STP协议的情况下,可能会
造成bpdu报文的广播风暴。
●No-learning
这种模式不关闭端口正常的报文转发功能,但禁止该端口学习
MAC地址。
优点:
不对网络拓扑产生影响。
设备可以实现报文的正常转发,不影响对接设备的正常业务。
防止MAC地址学习混乱,防止转发混乱。
可以做到设备自动检测,自动恢复。
缺点:
由于端口下不学习mac地址,造成更多的广播流量,加重系
统负担。
端口下的环路依然存在,也没有做任何限制。
必然产生广播风
暴。
Shutdown
这种模式在端口下发现环路后,直接Shutdown该端口,需
要用户手动恢复端口shutdown状态。
优点:
很好的防止了整网广播风暴的产生。
缺点:
影响网络拓扑。
用户的正常业务中断。
必须要用户手工干预。
Loopback-detection 一般在接入层设备使用配置在下行的用户侧的端口上。
用来检测端口下因用户组网或者配置出错导致的环路。
也可以防止黒客在端口下接入环路进行DOS攻击。
需要注意的是,该特性由于需要向外发送较多的广播报文,因此会影响效率。
三种动作模式各有自己的优缺点,需要用户根据具体情况进行配置。
二.缺省情况下,Access端口、Trunk端口和Hybrid端口环回监测功能均处于关闭状态。
∙对于Access端口,如果系统发现端口被环回监测,则根据环回监测动作对该端口进行相应的操作,并向终端上报Trap信息,同时删除该端口对应的MAC地址转发表项;如下所示:
<Sysname> system-view
[Sysname] loopback-detection enable
[Sysname] interface ethernet 1/0/1
[Sysname-Ethernet1/0/1] loopback-detection enable
Access端口这样配置即可生效;
∙对于Trunk端口或Hybrid端口,如果系统发现端口被环回监测,则只向终端上报Trap信息。
当端口的环回监测受控功能也同时开启时,系统根据环回监测动作对该端口进行相应的操作,并向终端上报Trap信息,同时删除该端口对应的MAC地址转发表项。
如下所示:<Sysname> system-view
[Sysname] loopback-detection enable
[Sysname] interface ethernet 1/0/1
[Sysname-Ethernet1/0/1] port link-type trunk
[Sysname-Ethernet1/0/1] loopback-detection enable [Sysname-Ethernet1/0/1] loopback-detection control enable
注:
①loopback-detection enable 分为全局模式下和接口模式下;
②只有在系统视图下和指定端口视图下均配置了
loopback-detection enable命令后,该端口的环回监测功能才能启动。
③当在系统视图下配置undo loopback-detection enable后,所有端口的环回监测功能均被关闭。
④loopback-detection per-vlan enable命令对Access端口无效。