机器人等级考试-10.让智能小车动起来(使用电机库版本)
- 格式:pptx
- 大小:5.58 MB
- 文档页数:17

全国青少年机器人技术等级考试模拟(三、四级)
实际操作考试试卷
考生姓名:证件编号:□□□□□□□□□□□□□□□□□□
一、考试说明
1.请仔细阅读考试系统中的“实操试题说明”及“实操样例示意图”,采用最适合样例示意图的器材完成搭建。
2.模型搭建与试卷填写必须都完成,否则实操考试不通过。
二、作品简答
1、请在右侧虚线框中画出本作品的
程序流程图。
(10分)
2、本作品用到了哪些机械原理?
(10分)三、作品展示
请在规定时间内,完成作品搭建调试,并将身份证件及作品置于以下虚线框中,由考评员现场拍摄照片。
框架的稳定与
协调性(15)
动力传递与
流畅性(15)
输入输出
元件正确(10)
编程调试
通过(30)
简答得分
(20)
完成时间
(10)
合计评分
(100)
指导教师签
字
考评员拍摄作品照片时
请将身份证件置于此框内
考评员拍摄作品视频(照片)时
请将作品置于此框内
(如作品较大,请确保摆放位置不超出上边框及左边框)
作品摆放位置上限
作
品
摆
放
位
置
左
限。
全国青少年机器人技术等级
考试试卷(一级)
一、实操模型样例(70分)
评分标准:
(1)机器人整体(20分)
a. 具备遥控接收装置(10分)
b. 机器人的固定程度(5分)
c. 机器人各部分插线正确(5分)
(2)运行程度和表现形式(15分)
1
a. 机器人整体结构对称美观(5分)
b. 重心合理(5分)
c. 运行平稳(5分)
(3)不同频道对小车的控制(35分)
a. 尝试用不同的频道控制小车运行(15分)
b. 用同一遥控器控制2台小车运行(15分)
c. 频道调节环节流畅(5分)
2
简答题(30分)
1、请在下面写出用到遥控器的设备(5分)
答:电视机空调汽车钥匙游戏手柄;
2、请写出该模型中蕴含的知识点(请同学分条作答,25分)
(1)完成遥控功能必须要有几大部分(5分)
答:遥控发射装载遥控接收装置中央处理器(CPU)
(2)有没有遥控器无需频道调节,开机自动匹配的遥控器(5分)
答:蓝牙遥控器;
(3)生活中要哪几大类遥控器,他们的特是什么?(15分)
答:红外遥控器,穿墙能力弱,一般控制距离小;(5分);
无线遥控器,发出的无线电波无方向性,控制距离较远;(5分)。
蓝牙遥控器无需手动调节频道,通电后会自动匹配连接;(5分);
3
4。
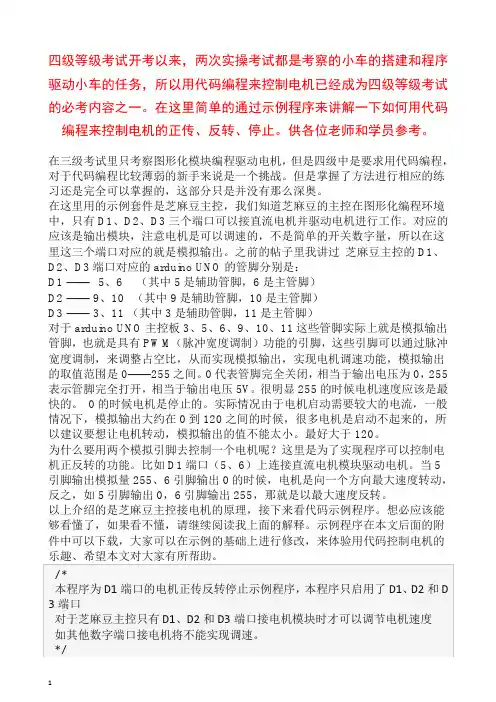
四级等级考试开考以来,两次实操考试都是考察的小车的搭建和程序驱动小车的任务,所以用代码编程来控制电机已经成为四级等级考试的必考内容之一。
在这里简单的通过示例程序来讲解一下如何用代码编程来控制电机的正传、反转、停止。
供各位老师和学员参考。
在三级考试里只考察图形化模块编程驱动电机,但是四级中是要求用代码编程,对于代码编程比较薄弱的新手来说是一个挑战。
但是掌握了方法进行相应的练习还是完全可以掌握的,这部分只是并没有那么深奥。
在这里用的示例套件是芝麻豆主控,我们知道芝麻豆的主控在图形化编程环境中,只有D1、D2、D3三个端口可以接直流电机并驱动电机进行工作。
对应的应该是输出模块,注意电机是可以调速的,不是简单的开关数字量,所以在这里这三个端口对应的就是模拟输出。
之前的帖子里我讲过芝麻豆主控的D1、D2、D3端口对应的arduino UNO的管脚分别是:D1 ——5、6 (其中5是辅助管脚,6是主管脚)D2 —— 9、10 (其中9是辅助管脚,10是主管脚)D3 —— 3、11 (其中3是辅助管脚,11是主管脚)对于arduino UNO主控板3、5、6、9、10、11这些管脚实际上就是模拟输出管脚,也就是具有PWM(脉冲宽度调制)功能的引脚,这些引脚可以通过脉冲宽度调制,来调整占空比,从而实现模拟输出,实现电机调速功能,模拟输出的取值范围是0——255之间。
0代表管脚完全关闭,相当于输出电压为0,255表示管脚完全打开,相当于输出电压5V。
很明显255的时候电机速度应该是最快的。
0的时候电机是停止的。
实际情况由于电机启动需要较大的电流,一般情况下,模拟输出大约在0到120之间的时候,很多电机是启动不起来的,所以建议要想让电机转动,模拟输出的值不能太小。
最好大于120。
为什么要用两个模拟引脚去控制一个电机呢?这里是为了实现程序可以控制电机正反转的功能。
比如D1端口(5、6)上连接直流电机模块驱动电机。
当5引脚输出模拟量255、6引脚输出0的时候,电机是向一个方向最大速度转动,反之,如5引脚输出0,6引脚输出255,那就是以最大速度反转。

单片机单片机单片机是把一个计算机系统集成到一个芯片上单片机(Microcontrollers)是一种集成电路芯片采用超大规模集成电路技术的小而完善的微型计算机系统系统结构简单,使用方便,实现模块化Arduinoarduino Arduino 优点:跨平台-简单清晰-开放性-方便学习 Arduino 通过传感器感知环境,控制执行器去影响环境 一个欧洲开发团队于2005年冬季开发Arduino 是一款便捷灵活、方便上手的开源平台包含硬件(Arduino 板)和软件(Arduino IDE)起源Arduino名字起源于开发者常去的酒吧命名Arduino开发者Massimo Banzi保持设计的开放源码理念有趣的是M经常喜欢去一家名叫di Re Arduino的酒吧而酒吧是1000年前意大利国王Arduin名字命名Arduino是将想法与物理世界连接起来的数字工具功能想法需要通过Arduino编程与控制才能改造世界编程就是将人类想法程序化赋予计算机从而实现控制未来机器人时代人人都需要懂得机器人语言-编程想法编程控制世界应用开源开放Arduino广泛应用于项目产品开发专业硬件开发者使用Arduino来开发他们的项目产品典型应用:3D打印,无人机,机械臂,小型CNC,机器人等大学机械·电子·自动化·软件开展Arduino相关课程创意电子爱好者们不断开发基于Arduino创意电子制作Arduino可以被用来制作许多有趣的创意电子制作典型创意:创意灯光·智能小车·智能DIY·宠物喂食机·电子显微镜等更多丰富创意Arduino玩法等你来开发安装安装 123 456验证使用使用认识Arduino硬件界面使用Arduino-IDE软件界面编程点亮仔细观察一下arduino上有没有一闪一闪的小灯。
2024年3月青少年机器人技术等级考试(测评师)实际操作试卷三级真题分数:100 题数:2一、电路搭设(共1题,共20分)。
1.元器件:(1)装置中包含2个LED灯模块或LED灯;(2分)。
(2)装置中包含红外遥控器;(2分)。
(3)装置中包含红外接收模块;(2分)。
(4)装置中包含舵机;(2分)。
电路搭设:(1)LED灯模块或LED灯与主控板正确连接;(4分)。
(2)红外接收模块与主控板正确连接;(4分)。
(3)舵机和主控板正确连接。
(4分)。
二、功能实现(共1题,共80分)。
2.说明:本程序有多种实现方法,只要效果符合要求即可。
编写程序文件命名规则为:DJKS3_身份证号,考试完毕确认考生在考试页面以附件形式上传。
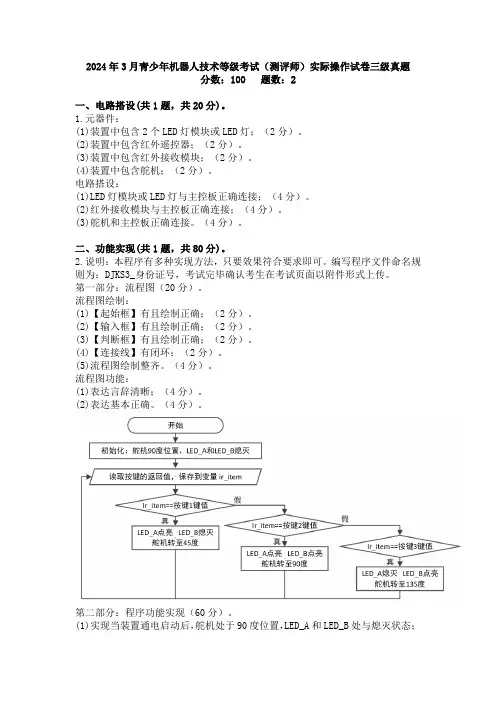
第一部分:流程图(20分)。
流程图绘制:(1)【起始框】有且绘制正确;(2分)。
(2)【输入框】有且绘制正确;(2分)。
(3)【判断框】有且绘制正确;(2分)。
(4)【连接线】有闭环;(2分)。
(5)流程图绘制整齐。
(4分)。
流程图功能:(1)表达言辞清晰;(4分)。
(2)表达基本正确。
(4分)。
第二部分:程序功能实现(60分)。
(1)实现当装置通电启动后,舵机处于90度位置,LED_A和LED_B处与熄灭状态;(6分)。
(2)实现当红外遥控器的1键点击后,LED_A点亮,LED_B熄灭;(9分)。
(3)实现当红外遥控器的1键点击后,舵机旋转至45度位置;(9分)。
(4)实现当红外遥控器的3键点击后,LED_A熄灭,LED_B点亮;(9分)。
(5)实现当红外遥控器的3键点击后,舵机旋转至135度位置;(9分)。
(6)实现当红外遥控器的2键点击后,LED_A和LED_B均点亮;(9分)。
(7)实现当红外遥控器的2键点击后,舵机旋转至90度位置。
(9分)。
在科技制作中,需要执行器给制作的装置提供动力,常用的执行器有直流电机、舵机、步进电机(步进是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为“步距角”)一步一步运行的, 其特点是没有积累误差)等。
直流电机是自常见的执行器之一。
在红外遥控小风扇章节中通过晶体三极管控制电路实现了电机的启停控制和速度控制,但没有实现转向控制。
在很多自动控制场合都需要控制电机的正反转。
那具体应该如何控制电机的呢?H桥电路H桥电路名称的由来是因为控制电路的形状像英文字母H而得名。
控制电机正反转的H桥开关电路如右图所示:M HM C B当开关A与D闭合时,电流如右图指示方向流过电机。
M C B当开关B与C闭合时,电流如右图指示方向流过电机。
同侧的开关A、C或者B、D不能同时打开,否则将导致短路。
将上面的开关换成晶体管,就构成了现在常见的H桥控制电路,采用NPN和PNP 晶体管配对。
如右图所示,晶体管Q1、Q2 和 Q3、Q4的基极分别相连。
当左侧输入低电平,右侧输入高电平时,晶体管Q1和Q4导通,Q2和Q3断开,电流流动方向如右图所示。
当左侧输入高电平,右侧输入低电平时,电流流动方向和图示相反。
直流电机驱动和控制模块除了用晶体管自行组装H桥控制电路,还可以直接选用专用的电机驱动控制IC。
常见的驱动芯片如下图:L293D L298N TB6612 上面三种芯片都包含了两组H桥式电路,可以驱动并控制两个电机的正反转。
L298N和TB6612还需要有外围电路,所以使用时一般都采用成品的电机驱动模块。
使用TB6612电机驱动芯片,MA电机速度控制口:D5MA电机方向控制口:D7MB电机速度控制口:D6MB电机方向控制口:D8小车姿态图示引脚参数前进Motor_run(1,30)Motor_run(2,30)后退Motor_run(1,-30)Motor_run(2,-30)左转Motor_run(1,30)Motor_run(2,0)通过控制MA、MB来实现小车运动方向的控制:小车姿态图示引脚参数右转Motor_run(1,0)Motor_run(2,30)原地左转Motor_run(1,30)Motor_run(2,-30)原地右转Motor_run(1,-30)Motor_run(2,30)速度-30表示马达反着转项目一:让智能小车动起来所需器件:Ø已搭建好的智能小车一辆堵转:由于减速电机受到阻力,当输入的PWM值产生的动力小于阻力时,电机不能转动,此时,电机会发出嗡嗡的声音。
机器人等级考试试题1. 关于使用动滑轮说法正确的是?()A. 是否省力与动滑轮的颜色有关B. 可以改变力的大小(正确答案)C. 不能省力D. 动滑轮的位置固定不动2. 以下说法正确的是?()A. 齿轮平行啮合两齿轮转向相反(正确答案)B. 齿轮垂直啮合两齿轮转向相同C. 链传动中链轮转向相反D. 链传动中传动链和链轮可以不在同一平面内3. 以下哪个工具无法改变施力大小?()A. 斜面B. 动滑轮C. 定滑轮(正确答案)D. 费力杠杆4. 下列物品应用了平行四边形不稳定性的是?()A. aB. b(正确答案)C. cD. d5. 如图该零件可以配合下列哪个工具使用?()A. aB. b(正确答案)C. cD. d6. 在理想状态下,以下哪个单摆运动周期最长?()A. aB. bC. cD. d(正确答案)7. 如图拉动同样重量的物体,最省力的是?()A. aB. b(正确答案)C. cD. d8. 当小朋友荡秋千到最低点时,下列说法正确的是?()A. 这时速度为0B. 这时动能最大(正确答案)C. 这时势能最大D. 这时速度最慢9. 如图,该零件上的螺旋是_____的变形?()A. 斜面(正确答案)B. 杠杆C. 滑轮D. 轮轴10. 下列齿轮组起加速作用的是?()A. 主动轮12齿,从动轮6齿(正确答案)B. 主动轮6齿,从动轮12齿C. 主动轮12齿,从动轮12齿D. 主动轮6齿,从动轮6齿11. 如图,b是主动件,下列说法正确的是?()A. a是蜗杆(正确答案)B. c是一个冠齿轮C. d是一个平齿轮D. d和c属于平行啮合12. 如图,该齿轮组中两个齿轮齿数相等,关于该齿轮组下列说法正确的是?()A. 起加速作用B. 起减速作用C. 传动比是1:1(正确答案)D. 两轮旋转方向相同13. 如图,人用棍子翘石头,阻力作用点是?()A. a点B. b点C. c点D. d点(正确答案)14. 下列物品没有应用轮轴的是?()A. aB. b(正确答案)C. cD. d15. 如图可以配合该工具使用的零件是?()A. aB. b(正确答案)C. cD. d16. 如图使用方向盘相当于使用了?()A. 轮轴(正确答案)B. 齿轮C. 斜面D. 滑轮17. 如图从山底爬到山顶走哪条路最省力?()A. a(正确答案)B. bC. cD. d18. 下列哪个是机器人? ()A. aB. b(正确答案)C. cD. d19. 机器人的控制器相当于人类的?()A. 大脑(正确答案)B. 皮肤C. 血管D. 心脏20. 如图下列哪个是轮轴?()A. aB. bC. c(正确答案)D. d21. 下图是齿轮垂直啮合的是?()A. a(正确答案)B. bC. cD. d22. 如图,关于该机构说法正确的是?()A. b是蜗杆(正确答案)B. a是蜗杆C. a是主动件D. c是主动件23. 关于杠杆说法正确的是?()A. 指甲刀是费力杠杆B. 核桃钳是费力杠杆C. 筷子是省力杠杆D. 开瓶器是省力杠杆(正确答案)24. 如图,关于该传动方式说法正确的是?()A. 传动链和链轮必须在同一平面内安装(正确答案)B. 链条长度不能调节C. a链轮和c链轮转动方向相反D. 这是齿轮传动25. 如图,使用力F拉动物体,关于该场景说法正确的是?()A. 使用了轮轴来省力(正确答案)B. 使用了轮轴来费力C. 使用了动滑轮D. 使用了斜面26. 关于链传动下列说法正确的是?()A. 一条传动链只能配两个链轮B. 链轮的转向一定相同(正确答案)C. 链传动传动比无法计算D. 链条长度无法调节27. 下图中有几个定滑轮? ()A. 0个B. 1个C. 2个D. 3个(正确答案)28. 关于齿轮传动说法正确的是?()A. 齿轮传动的传动比可以计算(正确答案)B. 齿轮传动适合远距离传动C. 齿轮传动容易打滑D. 平行啮合的齿轮转动方向相同29. 如图,该工具是?()A. 钳子B. 螺丝刀C. 羊角锤(正确答案)D. 扳手30. 如图盘山公路应用了?()A. 杠杆B. 轮轴C. 斜面(正确答案)D. 滑轮31. 如图,关于天平说法正确的有?()A. 这是省力杠杆B. 这是费力杠杆C. 这是等臂杠杆(正确答案)D. 天平相当于杠杆,动力臂等于阻力臂(正确答案)32. 以下属于平齿轮的有哪些?()A. a(正确答案)B. bC. c(正确答案)D. d33. 机器人的常见驱动方式为?()A. 电力驱动(正确答案)B. 气压驱动(正确答案)C. 液压驱动(正确答案)D. 手动驱动34. 关于定滑轮的特征说法正确的有哪些?()A. 可以用于省力B. 无法改变力的大小(正确答案)C. 可以改变力的方向(正确答案)D. 无法改变力的方向35. 下列方式能准确无误地传递动力的是?()A. 蜗轮蜗杆传动(正确答案)B. 齿轮平行传动(正确答案)C. 齿轮垂直啮合(正确答案)D. 链传动(正确答案)36. 放置在地面上的物体,降低重心,能增加它的稳定性。
机器人等级考试一级答案一、选择题(每题2分,共10分)1. 机器人等级考试一级主要考察的是以下哪个方面?A. 机器人编程B. 机器人设计C. 机器人操作D. 机器人维护答案:C2. 在机器人等级考试一级中,以下哪个不是必须掌握的技能?A. 基本的机器人结构认识B. 机器人的基本操作C. 高级编程语言D. 机器人安全使用答案:C3. 机器人等级考试一级中,不包括以下哪项内容?A. 机器人的组装B. 机器人的编程C. 机器人的竞赛D. 机器人的维修答案:D4. 机器人等级考试一级要求考生对机器人的哪个部分有基本了解?A. 传感器B. 执行器C. 控制器D. 所有以上答案:D5. 机器人等级考试一级中,考生需要了解的机器人操作不包括以下哪项?A. 基本的移动控制B. 简单的任务执行C. 复杂的路径规划D. 环境感知答案:C二、填空题(每题2分,共10分)1. 机器人等级考试一级要求考生能够识别并使用机器人的______和______。
答案:传感器;执行器2. 在机器人等级考试一级中,考生需要掌握机器人的______和______操作。
答案:基本;安全3. 机器人等级考试一级不涉及______的编程,这是更高级别考试的内容。
答案:高级编程语言4. 机器人等级考试一级中,考生需要了解机器人的______和______部分的基本功能。
答案:控制器;结构5. 机器人等级考试一级要求考生能够进行机器人的______和______。
答案:组装;维护三、判断题(每题1分,共5分)1. 机器人等级考试一级要求考生能够独立完成机器人的编程。
(×)2. 机器人等级考试一级不包括机器人的竞赛内容。
(√)3. 机器人等级考试一级中,考生需要掌握机器人的基本结构和功能。
(√)4. 机器人等级考试一级要求考生能够进行机器人的高级维修。
(×)5. 机器人等级考试一级中,考生不需要了解机器人的安全使用。
(×)四、简答题(每题5分,共10分)1. 简述机器人等级考试一级中,考生需要掌握的机器人操作技能包括哪些?答案:考生需要掌握机器人的基本移动控制、简单的任务执行以及环境感知等操作技能。
1.1小车动起来一、教材与学生情况分析《1.1小车动起来》是《Max:bot机器人探索之旅》教材中的第一章小车快跑的第一课,此前学生已经掌握Max:bot机器人的结构,初步了解Mind+软件的界面功能和编程方式,所以这节课主要通过编程实现Max:bot机器人前进,帮助学生逐步熟练使用Mind+软件,激发学生利用Max:bot机器人平台实现丰富功能的兴趣。
二、教学目标1.了解电机功能。
2.掌握Max:bot机器人前进的程序和“Max:bot主程序开始模块”和“电机控制模块”两个指令模块的功能。
3.体验使用Max:bot机器人的乐趣,激发对电子电路以及智能硬件的兴趣。
三、教学重难点教学重点:通过编程使Max:bot机器人前进。
教学难点:“Max:bot主程序开始模块”和“电机控制模块”两个指令模块的功能。
四、教学流程1.导入新课通过之前课程的学习我们已经对Max:bot机器人的“大脑”等各个部分有了了解,现在让小车动起来吧。
2.新课讲授(1)电机电子模块图片功能说明电机电机是可以带动小车运动的,实现转弯或直行,左侧电机引脚为P12,右侧电机引脚为P8。
请学生思考生活中有哪些地方使用到电机呢?✓风扇✓洗衣机、冰箱等家用电器也使用了电机,但与机器人所使用的不同。
(2)Max:bot主程序开始模块和电机控制模块名称 模块 功能说明 Max:bot 主程序开始模块部分程序只有放在该模块下才能上传执行。
电机控制模块控制电机的速度及方向。
(3)程序编写及上传a.编写程序实现Max:bot 机器人小车以200的速度前进,需要使用电机控制模块设置左右两侧电机速度,左侧为小车前进方向的左侧。
b. 删除不需要的指令模块,最终程序如下:请学生思考如果想重复使用同一个指令模块时需要如何操作? ✓ 重新在指令区拖拽所需指令模块✓ 鼠标指针指向需要重复使用的模块,右击鼠标复制。
当需要重复使用打断指令模块时,这种方法更加快捷。
c.保存项目:项目菜单——保存项目——选择保存位置、命名项目d. 使用USB 数据线连接小车和计算机,上传程序。
机器人三级考试内容三级机器人考试的内容可以简单总结为:
一、机器人概念与设计:
1.机器人的历史和发展现状;
2.机器人框架、结构设计;
3.机器人控制系统基础;
4.机器人感知器及传感器;
5.机器人运动性能;
6.机器人测量及导航以及定位;
7.机器人可靠性和安全性;
8.协调多个机器人工作;
9.多机器人对抗;
10.机器人实时配置及网络化系统。
二、机器人控制原理和技术:
1.运动控制基础;
2.机器人解算公式;
3.运动特性分析;
4.机器人控制系统;
5.逆解算和正解算;
6.模糊控制、神经网络及其他技术;
7.机器学习、智能控制及遗传算法;
8.机器人定位系统;
9.故障诊断与容错;
10.并行控制及可重定位控制。
三、现代机器人技术:
1.机器视觉;
2.多机器人系统;
3.机械手;
4.机器人装配;
5.空间机器人;
6.遥控机器人;
7.轮式机器人;
8.扫地机器人;
9.智能机器人;
10.五元素机器人设计。
机器人考试一级实操答案一、单项选择题(每题2分,共10题)1. 机器人的三大定律中,第一定律是什么?A. 机器人不得伤害人类B. 机器人必须服从人类命令C. 机器人必须保护自己D. 机器人必须帮助人类答案:A2. 在机器人编程中,哪个指令用于控制机器人停止?A. StartB. StopC. RunD. Pause答案:B3. 机器人的传感器不包括以下哪一项?A. 温度传感器B. 距离传感器C. 压力传感器D. 重力传感器答案:D4. 机器人的伺服电机通常用于实现什么功能?A. 驱动B. 传感C. 计算D. 控制5. 以下哪个不是机器人的组成部分?A. 机械结构B. 传感器C. 执行器D. 显示器答案:D6. 机器人的编程语言中,哪个是专门为教育机器人设计的?A. PythonB. ScratchC. JavaD. C++答案:B7. 机器人的路径规划通常不包括以下哪一项?A. 障碍物检测B. 路径优化C. 速度控制D. 颜色识别答案:D8. 机器人的人工智能中,哪个技术用于图像识别?A. 机器学习B. 深度学习C. 神经网络D. 所有以上答案:D9. 机器人的电源通常不包括以下哪一项?B. 太阳能板C. 交流电源D. 手动发电答案:D10. 机器人的操作系统中,哪个是开源的?A. ROSB. WindowsC. iOSD. Android答案:A二、多项选择题(每题3分,共5题)1. 机器人的传感器可以检测以下哪些环境因素?A. 光线B. 声音C. 湿度D. 温度答案:A, B, C, D2. 机器人的执行器可以是以下哪些类型?A. 电机B. 气缸C. 液压泵D. 齿轮答案:A, B, C3. 机器人的编程可以采用以下哪些语言?A. PythonB. JavaD. Scratch答案:A, B, C, D4. 机器人的人工智能可以应用在以下哪些领域?A. 医疗B. 教育C. 工业D. 服务答案:A, B, C, D5. 机器人的操作系统可以支持以下哪些功能?A. 多任务处理B. 网络通信C. 传感器数据处理D. 执行器控制答案:A, B, C, D三、判断题(每题1分,共5题)1. 机器人的传感器可以检测环境变化并做出响应。
1.机器人能够按照我们的指令行动,是因为它内部装有:
A.魔法芯片
B.传感器和控制器
C.神奇电池
D.彩色灯泡
2.在编程中,让机器人向前走一步的指令通常被称为:
A.跳跃
B.旋转
C.前进
D.闪烁
3.机器人识别周围环境并作出反应的能力,主要依赖于它的:
A.轮子
B.传感器
C.电池
D.颜色
4.当我们想让机器人唱歌时,应该使用哪种类型的模块或功能?
A.避障传感器
B.语音合成模块
C.红外遥控器
D.灯光效果模块
5.编程时,“循环”结构的作用是:
A.让机器人停下来
B.重复执行一段代码多次
C.改变机器人的颜色
D.让机器人跳起舞来
6.下列哪个不是机器人编程中常用的逻辑指令?
A.如果...那么...
B.总是...
C.否则...
D.重复...直到...
7.在机器人比赛中,为了获得更高的分数,通常需要:
A.让机器人睡觉
B.设计更复杂的任务完成策略
C.增加机器人的重量
D.频繁更换电池
8.机器人能够捡起并搬运物品,主要依赖于它的:
A.摄像头
B.机械臂
C.麦克风
D.轮子
9.编程中,“变量”可以理解为:
A.可以变化的数字或信息
B.机器人身上的装饰品
C.编程语言的颜色
D.机器人总是做的动作
10.当我们想要机器人按照特定路线移动时,首先需要做的是:
A.给机器人穿上漂亮的衣服
B.在机器人上安装导航传感器
C.告诉机器人它要吃的食物
D.用遥控器控制它的每一步。