通信系统信息控制技术国家级重点实验室第二届学术委员会成立
- 格式:pdf
- 大小:64.12 KB
- 文档页数:1
学校重点实验室建设与管理暂行办法_第一条为规范与加强高等学校国家重点实验室与教育部重点实验室(下列简称重点实验室)的建设与运行管理,根据国家重点实验室建设与管理暂行办法,特制定本办法。
第二条重点实验室是国家科技创新体系的重要构成部分,是国家组织高水平基础研究与应用基础研究、聚集与培养优秀科学家、开展学术交流的重要基地。
第三条重点实验室的任务是根据国家科技进展方针,面向国际科技前沿与我国现代化建设,围绕国民经济、社会进展及国家安全面临的重大科技问题,开展创新性研究,培养创新性人才。
其目标是获取原始创新成果与自主知识产权。
第四条重点实验室是依托高等学校具有相对独立性的科研实体,依托高等学校要给予实验室相对独立的人事权与财务权,为独立的预算单位,在资源分配上,计划单列,与院、系平行。
第五条重点实验室是学科建设的重点,依托高等学校应将其列入重点建设与进展的范畴。
第六条重点实验室实行“开放、流淌、联合、竞争”的运行机制。
第七条重点实验室要同意定期评估,优胜劣汰,动态进展。
第二章管理职责第八条教育部是重点实验室的行政主管部门,要紧职责是:(一)贯彻国家有关重点实验室建设与管理的方针、政策与规章,支持重点实验室的建设与进展。
(二)指导重点实验室的运行与管理,组织实施重点实验室建设。
(三)编制教育部重点实验室进展规划。
制定有关的政策与规章。
(四)审批教育部重点实验室立项、重组、合并、降级与撤消。
(五)聘任重点实验室主任与学术委员会主任。
(六)组织对教育部重点实验室的验收与评估。
(七)拨发、配套有关经费。
第九条各省、自治区、直辖市教育行政部门对地方所属高等学校重点实验室的要紧职责是:(一)制定地方高等学校重点实验室的进展规划。
(二)组织地方高等学校申请重点实验室立项,组织实施重点实验室建设,并指导运行与管理组织编报建设申请书、计划任务书与验收报告。
(三)审核重点实验室主任与学术委员会主任。
(四)监督项目建设与重点实验室的运行。
网络与交换技术国家重点实验室网络与交换技术国家重点实验室依托北京邮电大学, 1992年实验室(当时名称为:程控交换技术与通信网国家重点实验室)正式运行并对外开放,1995年实验室通过国家验收,2002年通过科技部对国家重点实验室进行的评估。
2004年由科技部正式批准实验室更名为…网络与交换技术国家重点实验室‟。
陈俊亮院士是实验室的创始人,曾任首届实验室主任和首届学术委员会主任。
现任实验室主任由孟洛明教授担任;杨义先教授、李晓峰教授任副主任。
现任学术委员会主任由邬贺铨院士担任,程时端教授任副主任。
目前实验室专职研究队伍中有两院院士1人、博士生导师9人、教授12人、副教授20人。
实验室的研究方向和研究内容:网络智能:下一代网络控制和业务支撑环境;网络智能模型及其分层结构;增值业务;网络智能化服务平台;语义网与本体理论;WEB服务。
网络管理:网络管理系统体系结构理论和成套关键技术,包括网络管理的信息模型、系统结构、测试、接口、接入的理论、方法和技术。
网络安全:网络安全(网络攻防、安全评估)、移动通信安全、现代密码理论与应用、信息伪装理论与应用、安全系统实现技术。
交换技术:软交换体系结构、通信协议、安全性、开放性及其性能;服务质量理论和技术;网络可靠性和生存性、业务量建模、流量控制和路由算法;下一代GMPLS光IP网络;光交换理论和技术。
“九五”以来,实验室在科学研究方面的基本情况如下:科研项目实验室承担了各类科研项目100余项,其中国家重点基础研究发展计划(973)项目2项,国家自然科学基金项目19项,国家高技术研究发展计划(863)项目27项,国家科技攻关计划项目8项,省部级重点项目40余项,国际合作项目近10项。
科技奖励实验室的科技成果5次荣获国家科技进步奖,荣获省部级科技进步奖20余次。
标准研究在标准研究方面,有7项研究成果形成国际标准(ITU-T标准),其中M.3208.3和M.3108.3是我国首次提出的系列化建议被ITU-T采纳。

信息与通信系统一级学科建设思考(讨论稿)在学校相关部门的大力支持和帮助下,经全体同仁共同努力,我院信息与通信系统一级学科硕士点经国务院学位委员会第二十八次会议审议通过。
这标志着我院办学层次迈上了新的台阶,同时也对今后建设与发展提出了更高要求,是学院发展历史的新机遇,更是一种全新的挑战,需要全体同仁同心同德,克服重重困难,不断摸索、积极主动、富有成效脚踏实地地开展建设工作,现将学科建设的一些建议呈于院领导,请批复。
(一)现状分析信息与通信工程学科包含通信与信息系统、信号与信息处理两个二级学科。
信息与通信工程学科曾拥有信号与信息处理硕士点,具有一定的研究生培养经历,设有信号与信息校级重点实验室。
主要针对智能信息处理、信源编码理论与数据压缩技术;自动测量系统、测角的数字化、模拟信号数字化,信号的检测及数据处理技术;无线通信中电波在复杂系统和随机介质中的散射、传播、衰减以及无线通信的环境电磁辐射监测与控制;以及宽禁带半导体信息材料的制备、理论模拟和应用,固体电解质和纳米光电器件的设计、制备和性能研究等,形成了“信息处理与电子信息材料” 、“信号传感与检测”、“无线通信中电波的散射和传播” 、“新型电子材料” 等四个较为稳定的研究方向。
近几年来,学科组成员先后在《Chin.Phys.Lett》、《Materials Science and techno logy》、《金属学报》、《物理学报》、《Chi nese Physic》等刊物发表高水平研究论文200余篇,其中已被SCI、El、ISTP三大索引检索或收录44篇。
完成或在研各类科研项目14 项。
获国家发明专利1项。
获得省厅局级科技成果奖6 项,陕西省人民政府高等教育教学成果二等奖1 项。
该学科教师积极参与本科教学和研究生培养工作。
“电路分析”、“模拟电子技术”课程被评选为延安大学精品课程,“地方高校电类专业应用型人才培养体系的创新与实践”和获得陕西省教学成果二等奖。

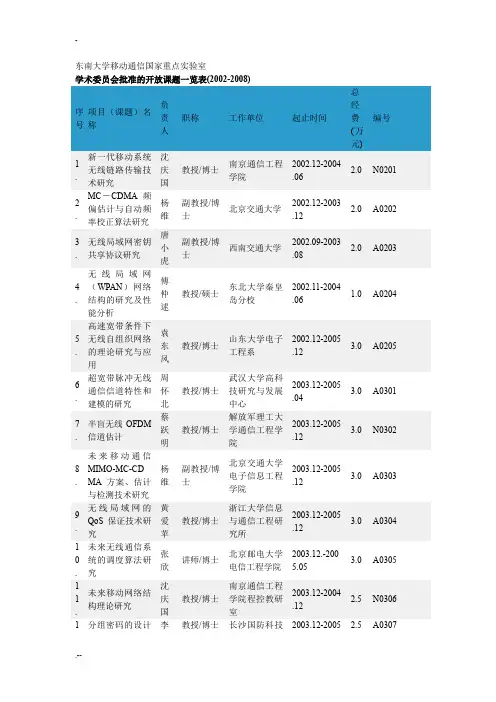
东南大学移动通信国家重点实验室学术委员会批准的开放课题一览表(2002-2008)序号项目(课题)名称负责人职称工作单位起止时间总经费(万元)编号1 . 新一代移动系统无线链路传输技术研究沈庆国教授/博士南京通信工程学院2002.12-2004.062.0 N02012 . MC-CDMA频偏估计与自动频率校正算法研究杨维副教授/博士北京交通大学2002.12-2003.122.0 A02023 . 无线局域网密钥共享协议研究唐小虎副教授/博士西南交通大学2002.09-2003.082.0 A02034 . 无线局域网(WPAN)网络结构的研究及性能分析傅仲逑教授/硕士东北大学秦皇岛分校2002.11-2004.061.0 A02045 . 高速宽带条件下无线自组织网络的理论研究与应用袁东风教授/博士山东大学电子工程系2002.12-2005.123.0 A02056 . 超宽带脉冲无线通信信道特性和建模的研究周怀北教授/博士武汉大学高科技研究与发展中心2003.12-2005.043.0 A03017 . 半盲无线OFDM信道估计蔡跃明教授/博士解放军理工大学通信工程学院2003.12-2005.123.0 N03028 . 未来移动通信MIMO-MC-CDMA方案、估计与检测技术研究杨维副教授/博士北京交通大学电子信息工程学院2003.12-2005.123.0 A03039 . 无线局域网的QoS保证技术研究黄爱苹教授/博士浙江大学信息与通信工程研究所2003.12-2005.123.0 A03041 0 . 未来无线通信系统的调度算法研究张欣讲师/博士北京邮电大学电信工程学院2003.12.-2005.053.0 A03051 1 . 未来移动网络结构理论研究沈庆国教授/博士南京通信工程学院程控教研室2003.12-2004.122.5 N03061分组密码的设计李教授/博士长沙国防科技2003.12-2005 2.5 A03072 . 与分析超大学理学院数学与系统科学系.121 3 . 多发射多接收天线分集关键技术研究刘琚教授/博士山东大学信息科学与工程学院2004.01-2005.103.0 A04011 4 . 衰落信道下Shannon极限码的性能分析、码设计和解调解码算法研究吴晓富讲师/博士解放军理工大学通信工程学院2004.01-2006.013.0 N04021 5 . 基于神经网络的Turbo译码刘星成副教授/博士中山大学电子与通信工程系2004.01-2005.123.0 A04031 6 . 基于LDPC码和多维信号星座的空时码研究白宝明副教授/博士西安电子科技大学综合业务网国家重点实验室2004.01-2005.123.0 A04041 7 . 超宽带同步技术研究邹传云教授/博士桂林电子工业学院通信与信息工程系2004.04-2006.092.0 A04051 8 . MIMO信道的均衡技术研究张忠培副教授/博士成都电子科技大学通信学院抗干扰实验室2004.01-2004.122.0 A04061 9 . 基于全互连立方体的移动自组织网络王洪玉副教授/博士浙江大学信电系2004.01-2005.122.0 A04072 0 . Beyond 3G系统中的HARQ技术研究王亚峰讲师/博士北京邮电大学电信工程学院2004.01-2005.052.0 A04082 1 . 频率选择性衰落信道下LDPC/Turbo编码OFDM调制系统的设计及其迭代处理算法研究吴晓富讲师/硕士解放军理工大学通信工程学院2005.01-2007.015 N2005012 2 . OFDM系统信道估计与迭代译码联合相干检测技术研究徐大专教授/博士南京航空航天大学2005.02-2006.124 N2005022 3 . 分组密码设计与分析中纠错码理论与方法李超教授/博士国防科技大学理学院数学与系统科学系2005.04-2006.044 A2005032分组码的基于正唐教授/博士扬州大学数学2005.07-2006 4 A2005044 . 规图的译码算法元生科学学院.122 5 . 无线网络中的关键网络信息论问题樊平毅教授/博士清华大学电子工程系2005.03-2007.034 A2005052 6 . LDPC码的不等保护能力研究文红讲师/博士电子科技大学通信抗干扰技术国防重点实验室2005.03-2006.092 A2005062 7 . 宽带无线通信系统中的介质接入控制潘甦副教授/博士南京邮电学院通信工程系2005.04-2006.122.5 N2005072 8 . 可重配置MIMO系统中的天线子集选择技术刘琚教授/博士山东大学信息科学与工程学院2005.07-2006.123 A2005082 9 . MIMO系统的信道容量和空时编码理论研究叶中付教授/博士中国科学技术大学电子工程与信息科学系2005.03-2007.033 A2005093 0 . 移动多媒体通信中LDPC 码的研究袁东风教授/博士山东大学信息科学与工程学院2005.01-2007.013 A2005103 1 . 相关MIMO衰落信道容量分析岳殿武教授/博士大连海事大学2006.01-2006.122 A2005113 2 . MIMO-OFDM无线通信系统中的均衡技术研究蔡跃明教授解放军理工大学通信工程学院2006.01-2007.123 N2006013 3 . 分布式宽带无线网络关键技术研究聂景楠教授解放军理工大学通信工程学院2006.06-2008.063 N2006023 4 . TDD模式下MIMO系统闭环传输技术研究宋荣方教授南京邮电大学2006.01-2007.123 N2006033 5 . UWB系统的性能分析和接收检测技术研究杨龙祥教授南京邮电大学通信与信息工程学院2006.07-2007.123 N2006043 6 . 求解通信网络优化问题和最小码覆盖问题的快速算法研究郝志峰教授华南理工大学理学院2006.07-2007.123 A2006053 7 . 低复杂度MIMO-OFDM信道估计算法研究郑紫微教授大连海事大学信息工程学院2006.01-2008.013 A2006063衰落信道下基于史博士后电子科技大学2006.03-2007 3 A2006078 . EXIT分析的迭代译码技术治平通信抗干扰技术国防重点实验室.093 9 . 无线Mesh网络多协议算法综合设计研究方旭明教授西南交通大学2006.03-2008.023 A2006084 0 . OFDM(MIMO-OFDM)系统中快时变信道估计研究束锋讲师南京理工大学电光学院通信工程系2006.01-2007.123 N2006094 1 . 基于代数曲线的LDPC码设计胡万宝教授安庆师范学院数学与计算科学学院2006.01-2008.123 A2006104 2 . 衰落环境下MIMO系统的性能分析与新型低复杂度无线通信系统的设计王保云教授南京邮电大学2007.01-2008.125 N2007014 3 . 有结构的LDPC码的构造与性能分析夏树涛副研究员清华大学深圳研究生院2007.01-2008.125 W2007024 4 . MC-CDMA系统跨层自适应无线传输技术研究杨维教授北京交通大学2007.01-2008.123 W2007034 5 . 利用子图分割法构造基于生成矩阵的高性能非正规LDPC优选码仰枫帆教授南京航空航天大学2007.01-2008.123 N2007044 6 . 可导航的无线传感器网络拓扑控制研究饶云华副教授武汉大学2007.01-2008.123 W2007054 7 . CP-SCBT系统中的多普勒估计算法研究华惊宇讲师浙江工业大学2007.01-2008.123 W2007064 8 . 近香农限高速编码调制技术研究吴晓富副研究员解放军理工大学通信工程学院2008.1-2009.125 N2008014 9 . 多用户MISO/MIMO系统下的自适应用户选择和调度算法研究刘琚教授山东大学信息科学与工程学院2008.1-2009.124 W2008025 0基于交织分离的迭代(Turbo)系马征副教授西南交通大学信息科学与技2008.1-2009.124 W200803. 统的测试理论与方法研究术学院5 1 . Mesh网中的合作中继技术研究孟庆民讲师南京邮电大学2008.1-2009.124 N2008045 2 . 高度非线性函数的性质、构造与应用李超教授国防科技大学理学院数学与系统科学系2008.1-2009.123 W2008055 3 . 有限尺寸MIMO移动台系统容量优化设计李岳衡副研究员河海大学计算机及信息工程学院2008.1-2009.123 N2008065 4 . 代数攻击与代数免疫度屈龙江讲师国防科技大学理学院数学与系统科学系2008.9-2010.88 w2008075 5 . 基于新型网络编码技术的合作通信研究樊平毅教授清华大学电子工程系2008.9-2010.89 w2008085 6 . 无线网络中动态三维多址技术研究宋荣方教授南京邮电大学2008.9-2010.88 N2008095 7 . 无线网络中的协作中继通信协同性能分析岳殿武教授大连海事大学2008.9-2010.88 W2008105 8 . 卫星通信中极低信噪比环境的多普勒参数估计算法及应用研究华惊宇副教授浙江工业大学2008.9-2010.88 W2008115 9 . 多用户协作通信系统的中继选择算法研究郑紫微教授大连海事大学2008.9-2010.88 W2008126 0 . 基于协作感知的动态频谱共享关键技术研究朱琦教授南京邮电大学2008.9-2010.88 N2008136 1 . 协同通信中的中继选择算法蔡跃明教授解放军理工大学2008.9-2010.89 N2008146 2 . 新型mesh网络的接入技术研究谢宁讲师深圳大学2008.9-2010.89 W2008156 3 . 基于编码协作的OFDMA跨层无线通信技术研究许昌龙副研究员北京交通大学2008.9-2010.89 W2008166 4无线网络认证协议的设计与安全曹天教授中国矿业大学2008.9-2010.88 W200817. 分析杰6 5 . 网络编码技术在协作通信系统中的应用史治平副教授电子科技大学2008.9-2010.89 W2008186 6 . chase型译码算法的搜索中心的研究唐元生教授扬州大学数学科学学院2008.9-2010.89 W2008196 7 . 基于网络传输的数字喷泉码研究孙蓉副教授西安电子科技大学2009.9-2011.95 W2009016 8 . 基于部分信道信息反馈的多用户MIMO-OFDM系统的资源分配问题研究唐岚讲师南京大学2009.9-2011.98 N2009026 9 . 多维序列及其在流密码中的应用研究朱士信教授合肥工业大学2009.9-2011.98 W2009037 0 . MIMO-OFDM系统中自适应调制和信道估计算法研究虞湘宾副教授南京航空航天大学2009.9-2011.96 N2009047 1 . 认知无线电功率控制和低反馈预编码算法的研究张海霞副教授山东大学2009.9-2011.910 W2009057 2 . 认知协作无线网络中的频谱资源管理技术研究赵军辉副教授北京交通大学2009.9-2011.98 W2009067 3 . 融入网络编码的多接入中继通信的网络编码与LDPC码的联合设计研究陈文教授上海交通大学2009.9-2011.99 W2009077 4 . 光无线混合网状网优化设计和路由机制研究何荣希教授大连海事大学2009.9-2011.95 W2009087 5 . LTE中基于移动负载均衡的小区切换优化算法研究郑小盈助理研究员上海无线通信研究中心2009.9-2011.915 W2009097 6 . 基于频域探测技术的超宽带室内信道模型研究林水洋助理研究员上海无线通信研究中心2009.9-2011.915 W2009107基于跨层设计的张讲师南京邮电大学2009.9-2011.8 N2009117 . 无线Mesh网络QoS路由模型研究晖97 8 . 认知无线Mesh网络自组织拓扑与路由技术研究章国安教授南通大学2009.9-2011.99 W2009127 9 . 用于UWB通信的高速、低功耗ADC芯片设计技术研究洪志良教授复旦大学2009.9-2011.915 W2009138 0 . 协同分布式无线通信系统的空分调度技术研究蒋占军副教授兰州交通大学2009.9-2011.98 W2009148 1 . MIMO中继信道中的链路自适应算法及最优资源分配杨亮副教授暨南大学2009.9-2011.910 W2009158 2 . 多跳蜂窝网中的无线资源分配技术研究王俊波讲师南京航空航天大学2010.9-2012.910 2010D018 3 . 协同通信中的模拟网络编码技术研究侯晓赟副教授南京邮电大学2010.9-2012.98 2010D028 4 . 无线物理层加密的信息论基础及编码研究吴晓富副研究员解放军理工大学2010.9-2012.910 2010D038 5 . 相对广义Hamming 重量及其在网络编码中的应用研究骆源教授上海交通大学2010.9-2012.910 2010D048 6 . 物理层信息安全技术研究文红副教授电子科技大学2010.9-2012.99 2010D058 7 . 高速移动环境下单载波分块传输系统中的信道估计与信号检测问题研究华惊宇副教授浙江工业大学2010.9-2012.99 2010D068 8 . 新型心电传感技术及其在传感网健康工程中的应用研究冯南高级工程师南京烽火星空通信发展有限公司2010.9-2012.914 2010D078 9交织频分多址信号优化及检测技肖悦副教授电子科技大学2010.9-2012.98 2010D08. 术研究9 0 . 无线传感器网络中协同MAC协议研究蔡跃明教授解放军理工大学2010.9-2012.98 2010D099 1 . 基于CoMP的协作MIMO系统不同CSI获知条件下的收发联合优化技术研究许宏吉讲师山东大学2010.9-2012.98 2010D109 2 . 基于分布式协作多天线OFDM体制的高速铁路宽带无线通信技术研究杨维教授北京交通大学2010.9-2012.98 2010D119 3 . 序列构造及其在CDMA和OFDM通信系统中的应用罗金权讲师扬州大学2010.9-2012.97 2010D129 4 . 协作多基站多用户MIMO系统关键技术研究束峰副教授南京理工大学2010.9-2012.97 2010D139 5 . 基于社交网络的认知无线电频谱共享陈宏滨副教授桂林电子科技大学2010.9-2012.97 2010D149 6 . 移动Ad hoc网络路由性能优化研究张信明副教授中国科学技术大学2010.9-2012.97 2010D15。

北京邮电大学原继续教育学院导师介绍(2008)专业:通信与信息系统丁炜教授,博士研究生导师宽带通信网研究中心领衔教授自1986年以来培养研究生(含博士、硕士)近百人,发表论文150余篇,完成重大科研项目10项,申请专利3项,荣获省部级以上奖项共5项。
目前正在研究的项目:“广义MPLS实现和安全路由器研究”,并与美国INTER 公司合作建立联合实验室,对下一代网络关键技术进行跟踪和预测。
丁炜教授所负责的北京邮电大学培训中心通信网科研室(现更名为宽带通信网研究中心)成立于1985年。
该科研室的宗旨是跟踪世界通信网络新技术的发展,开展对其前沿课题的研究,掌握相关理论和先进技术,力求创新,为我国通信事业的发展和培养优秀的高级通信科学技术人才做出自己的贡献。
目前,为了紧跟国际宽带通信网络新技术的发展,实验室正在进行MPLS协议软件和路由软件的开发、“具有MPLS功能的多业务边缘路由器的研制”、“INTEL网络处理器应用的研究与开发”等项目,其中边缘路由器的研制项目中采用了具有自主知识产权的芯片设计来实现各种网络协议的处理和不同速率接口数据流的转发。
温向明教授,博士研究生导师研究方向:博士研究生:宽带通信网络理论与技术、无线宽带网络理论与技术硕士研究生:IP宽带通信网络技术、移动通信网络技术毕业于北京邮电大学,获通信与信息系统工学博士学位;现任北京邮电大学校长助理兼研究生院常务副院长;校学术委员会委员和校学位委员会委员;教育部归国留学评审专家;北京市信息化专业人才合作培养项目负责人;中国电信网络资源管理专家组副组长;中国通信学会高级会员;北京市大学生电子竞赛组委会副主任等。
长期从事通信与信息系统专业方面的科研与教学工作,主持和参与完成了国家级项目6项,前邮电部项目3项,校级项目1项,横向项目8项。
其中:国家863项目“宽带光纤用户网总体技术研究”,得到国家科委专家的好评,总评结果为Ab;另外,“我国接入网发展战略的研究”获邮电部科技进步二等奖;国家重大项目“移动增值业务网络安全协议方案研究与实现”和“具有V5接口的DLC网元管理设备”已进行成果转化,取得了很好的经济效益和社会效益;“V5接口用户接入系统的监控技术研究”已在通信网中应用。
软件开发环境国家重点实验室软件开发环境国家重点实验室简介软件开发环境国家重点实验室于1988年通过国家计委专家认证,并确定为用世界银行贷款建设的国家重点实验室。
1992年后获得世界银行贷款共129万美元,购置了实验室建设初期的要紧设备与基础设施,1992年10月对外开放。
1995年通过了教育部与基金委组织的专家验收。
实验室是国家对外开放的软件新技术、软件开发工具与环境的应用基础研究与关键技术研发基地。
实验室实行主任负责制与学术委员会评审制。
国务院学位委员会委员、中国科学院院士、北京航空航天大学校长李未教授担任实验室主任。
1997年12月经教育部批准,成立了第二届学术委员会,由12名国内外知名专家构成,中国科学院院士董韫美教授担任主任。
本届学术委员会成员中的二位外籍专家,分别来自日本筑波大学与德国马普计算机研究所。
1996年以来,实验室基于对软件产业国际国内形势的分析,确定了“面向软件产业进展的主战场,瞄准软件基础研究的世界前沿,突破研制大型软件的关键技术,深化原创性的软件基础研究”的进展战略。
在这个进展战略的指导下,实验室根据自身多年的学术积存与研究特色,并结合国际学科前沿研究与进展趋势,以原创性理论研究为基础,以关键技术突破为重点,以研制先进的软件开发环境与平台为总目标,设立了计算机科学理论与基础、高速网下的协同工作环境与面向领域服务的软件支撑技术三个有特色、有优势的研究方向。
自1996年以来,实验室共承担科研项目共156项。
其中,国家科学基金项目14项,攀登计划(子课题)1项,973计划项目1项(4个课题),863计划项目23项,部委级重点项目11项,其他课题及横向协作项目94项,科研经费共计8065万元。
实验室取得的要紧成果有:在软件基础研究方面:1)在国内率先倡导将网络环境下海量信息的组织、传输与处理的研究作为软件基础研究的一个重要方向,并制定了全面的研究计划。
1999年科技部重大基础研究规划项目“网络环境下海量信息的组织、处理与传输的理论与方法”正式立项启动,实验室主任李未院士任该项目的首席科学家。
电信工程学院简介电信工程学院是北邮规模最大的学院,现有教职工139人,在校博士生92人、硕士生419人、本科生1674人,共计2185人,拥有一支以中国科学院院士叶培大教授为代表的一批高水平的博士生导师和学科带头人组成的学术梯队,现有博士生导师18人,硕士生导师54人,教授30人,副教授34人,其中多位是国内外知名专家教授。
我院科研队伍力量雄厚,近年来,先后承担完成了国家自然科学基金、七五攻关、八五攻关、国家863计划、部级等多项重点科研项目及一批横向科研任务,在高新技术领域科研成果斐然。
2000年发表论著约300篇,到位科研经费3500万。
学院下设七个中心:光通信无线通信计算机技术多媒体通信通信网技术电路与系统实验中心博士学位专业:通信与信息系统电路与系统物理电子学电磁场与微波技术密码学硕士学位专业:通信与信息系统信号与信息处理电路与系统计算机应用技术电磁场与微波技术物理电子学生物医学工程电子信息工程部分导师简介:孙景鳌、蔡安妮:二位教授都是留美博士。
博士生导师,共同领导着以图象处理、图象通信和图象识别为研究方向、30-40人规模的研究室。
该研究室在自动指纹识别技术和宽带综合业务多媒体通信技术方面,多年来在国内一直处于领先地位。
陈磊,博士,副教授,通信与信息系统专业,从事数字电视、图像通信领域的研究工作,相关工作多次获得“国家科学技术进步奖”、“邮电部科学技术进步奖”、“广播电影电视总局科学技术进步奖”。
研制成功HDTV系统复用器、虚拟图像系统、MPEG-2数字电视编码解码复用系统、HDTV信号发生器。
目前项目:MPEG-2/DVB数字电视复用器、NVOD系统、小波图像通信系统、DVB-C信道调制器、基于IP协议的TS流传输。
孙曙和高级工程师,北邮电信科技股份公司技术总监,电信工程学院兼职教授。
专业领域:通信与信息系统。
主要研究方向:接入网(基于IP的宽带接入系统)/电信网运维管理系统科研开发条件好,课题经费充足。
第43卷 第12期2020年12月计 算 机 学 报CHINESEJOURNALOFCOMPUTERSVol.43No.12Dec.2020收稿日期:2019 06 17;在线发布日期:2020 01 18.本课题得到国家重点研发计划(2017YFB1001901)资助.史殿习,博士,研究员,中国计算机学会(CCF)会员,主要研究领域为人工智能、分布式计算、云计算及大数据处理等.E mail:dxshi@nudt.edu.cn.洪 臣,硕士,主要研究方向为人工智能、分布式计算及云计算等.康 颖(通信作者),博士,助理研究员,主要研究方向为人工智能、数据挖掘、社区发现等.E mail:kangying_841218@sina.com.金松昌,博士,助理研究员,主要研究方向为人工智能、数据挖掘、社区发现等.张拥军,博士,研究员,主要研究领域为高性能计算、分布式应用系统等.杨 东,学士,主要研究方向为有线通信、信息安全防护等.面向多无人机协同飞行控制的云系统架构史殿习1),2),3) 洪 臣4) 康 颖2),3),5) 金松昌2),3) 张拥军2) 杨 东5)1)(国防科技大学计算机学院 长沙 410073)2)(军事科学院国防科技创新研究院 北京 100166)3)(天津(滨海)人工智能创新中心 天津 300457)4)(中国人民解放军61932部队 北京 100071)5)(中国人民解放军31401部队 长春 130022)摘 要 有限的载荷使得无人机难以承载过多的仪器设备,其极大地限制了无人机上资源的交互、共享以及无人机遂行任务多样性的能力.多无人机智能协同成为AI领域发展的主流方向,但已有的多无人机系统存在通信距离受限、数据资源分离等问题,且因网络连接的不稳定性及数据传输的延迟性,多无人机间难以实现有效的协同控制.本文提出了一种面向多无人机协同飞行控制的云系统架构UAV3CA.UAV3CA在云端为多无人机构建了一个“远程大脑”,通过PaaS抽象封装无人机及其上资源,可实现多无人机间信息数据的实时共享,并基于云端强大的存储和计算能力完成多无人机的统一规划及协同飞行控制.实验从单无人机制导和多无人机协同两个方面,对UAV3CA在网络通信的稳定性、数据传输的实时性和协同控制的有效性等方面的性能给予了验证,最终以完美的编队队形呈现出UAV3CA协同控制方式的灵活多样性.关键词 多无人机;云系统架构;协同飞行控制;实时共享中图法分类号TP393 犇犗犐号10.11897/SP.J.1016.2020.02352犆犾狅狌犱 犅犪狊犲犱犆狅狀狋狉狅犾犛狔狊狋犲犿犃狉犮犺犻狋犲犮狋狌狉犲犳狅狉犕狌犾狋犻 犝犃犞狊犆狅狅狆犲狉犪狋犻狏犲犉犾犻犵犺狋SHIDian Xi1),2),3) HONGChen4) KANGYing2),3),5) JINSong Chang2),3)ZHANGYong Jun2) YANGDong5)1)(犛犮犺狅狅犾狅犳犆狅犿狆狌狋犲狉犛犮犻犲狀犮犲,犖犪狋犻狅狀犪犾犝狀犻狏犲狉狊犻狋狔狅犳犇犲犳犲狀狊犲犜犲犮犺狀狅犾狅犵狔,犆犺犪狀犵狊犺犪 410073)2)(犖犪狋犻狅狀犪犾犐狀狀狅狏犪狋犻狅狀犐狀狊狋犻狋狌狋犲狅犳犇犲犳犲狀狊犲犜犲犮犺狀狅犾狅犵狔,犃犮犪犱犲犿狔狅犳犕犻犾犻狋犪狉狔犛犮犻犲狀犮犲狊,犅犲犻犼犻狀犵 100166)3)(犜犻犪狀犼犻狀犃狉狋犻犳犻犮犻犪犾犐狀狋犲犾犾犻犵犲狀犮犲犐狀狀狅狏犪狋犻狅狀犆犲狀狋犲狉,犜犻犪狀犼犻狀 300457)4)(犘犲狅狆犾犲’狊犔犻犫犲狉犪狋犻狅狀犃狉犿狔狅犳犆犺犻狀犪犖狅.61932,犅犲犻犼犻狀犵 100071)5)(犘犲狅狆犾犲’狊犔犻犫犲狉犪狋犻狅狀犃狉犿狔狅犳犆犺犻狀犪犖狅.31401,犆犺犪狀犵犮犺狌狀 130022)犃犫狊狋狉犪犮狋 Unmannedaerialvehicle(UAV),asapriorbranchofintelligentunmannedsystem,hasattractedawiderangeofinterestfromdifferentkindsofapplicationdomains,includingreal timemonitoring,providingwirelesscoverage,remotesensing,searchandrescue,deliveryofgoods,securityandsurveillance,precisionagriculture,andcivilinfrastructureinspectionetc.However,thereareseveralnewchallengesarisingfrommoreandmorecomplexapplicationenvironmentsandscenes,whichsettingahigherdemandfortheextensiblecapacityofUAV,especiallyforsomepropertiesofUAVsuchassmallsize,lightweight,enduringenergy,processingcapability,signaltransmissionrangeandsoon.ThelimitedprocessingpowerandpayloadofUAVarethemostchallengingissues,whichrestraintheon boardrequirementslikesensorweight,sizeandrequiredpower.Asaresult,itisdifficultforUAVtocarryonplentyofinstrumentsandequipmentsandhardwireprocessors,whichimposesdramaticalrestrictionsontheexchangeandshareofresourcesbetweenUAV,andonthecapabilityofUAVtoexecutediversetasksliketrackingmultipleobjects,explorationofcomplexterrainandsoon.Toaddresstheproblemsmentionedabove,manysolutionshavebeenpromoted,ofwhichonemainstreamonAIdevelopmentistomakemulti UAVsflyinginsomeformationandcompletingjobsintheformofintelligentcooperation,whilebreakingthroughtheintrinsiclimitationsofindividualUAVinpayload,enduringenergy,computingandmemorypower.However,theexistedsystemsofmulti UAVslackofcollaborationhavebeenfacedupwithsuchproblemsastheconfineddistanceofwirelesscommunicationandseparationofkindsofdatasources.Inaddition,thecooperativecontrolonmulti UAVsishardtorealizebecauseoftheinstabilityofnetworkconnectionaswellasthelatencyofdatatransmission.Inlightofthedeficiencyofsynergyofmulti UAVs,thispaperproposesacloud basedcontrolsystemarchitectureformulti UAVscooperativeflight(shortforUAV3CA).ThemainideaofUAV3CAistoconfiguratea“remotebrain”formulti UAVsbasedontheconstructionofcloud,equallymeaningthatbyvirtueoftheabstractionandencapsulationoftheresourcesfromUAVsoronboardofUAVsbasedonPaaS(platformasaservice),theinformationanddataamongmulti UAVsareabletoshareinrealtime.Foranotherthing,thepowerfulstorageandcomputingabilityofthecloudputitintorealitythatenablingthemulti UAVstoplaninaunifiedmannerandcontrollingthecooperativeflightofmulti UAVs.Abundantexperimentalresultsfromtwodifferdesignedaspects,ofthatoneforsingletonUAVguidanceandtheotherformulti UAVscooperation,demonstratetheexcellentperformancesofthepresentedUAV3CA,whichareconcretelyshownasthenetworkcommunicationbecomingstablewithoutinterruption,thedatatransmissionreachingoneanotheramongmulti UAVssystemintime,andachievingthevalidcooperativecontrolonmulti UAVsbymeansoftheresourcessharedoncloud.Intheend,theperfectdisplayofformationevolutionoffiveunmannedaerialvehiclesinthevirtualenvironmenthasaccountedfortheflexibilityandmultiformityofcooperativecontrolpatternsofmulti UAVsbasedontheproposedUAV3CA.犓犲狔狑狅狉犱狊 multi UAVs;cloud basedsystemarchitecture;cooperativeflightcontrol;real timesharing1 引 言智能无人系统是人工智能(AI)领域的重要应用之一,其按照适用场景的不同分为无人车、无人机、空间机器人、海洋机器人、无人工厂机器人等不同类别[1],其中以无人机(UnmannedAerialVehicle,UAV)的应用最为典型且广泛.作为一种新兴产业和最具发展前景的AI技术,无人机不仅潜移默化的改变着人们的生活模式,还将在未来的产业或商业乃至民用、军事领域引发一场革命性变革.无人机因其具有成本低、全天候、零伤亡等优势,不仅能够取代人完成简单的重复性劳动,如边境巡逻、精准农业、货物运送、道路交通实时监管等,还能够在复杂环境或危险场景中替代人完成特殊难度的任务,如遥测遥感、建筑与公共设施巡检、事故灾害现场勘测及救援等[2].但随着应用需求的不断扩展,实时多变、纷繁复杂的任务场景对无人机提出了更多更高的要求和挑战.面对单无人机有效载荷低、数据信息整合能力有限等情形,多无人机集群化、协同化、智能化成为无人机技术发展的一种必然趋势.体积小,重量轻是无人机的优势,但同时制约着无人机自身有效的载荷能力,使之难以承载过多的仪器设备和硬件处理器.目前,已有的无人机操控系统主要是以无线局域网或WiFi作为传输媒介,通过遥控器或者软件APP建立端到端的连接并施加控制,其最大的局限性是通信距离受限、可操作性不强,且不支持多架无人机同时接入同一个操控端局.因此,如何突破上述瓶颈成为亟待解决的问题.扩展无人机的体积以增加其有效载荷及存储计算能力或许是一种方法.但如果将多架无人机组成一个集群,使之协同飞行并执行任务,其将具备单无人机无353212期史殿习等:面向多无人机协同飞行控制的云系统架构可比拟的优势.正如Humboldt等人[3]所言,利用有限的资源创造无限的价值(makeinfiniteuseoffinitemeans),大量低成本的无人机通过有机的组合,会产生群体智能效应,这将极大地推进无人机潜在的应用能力.多无人机协同技术的研究未来可用于多个领域,其控制系统架构具有广阔的应用前景,并将在国民经济中产生巨大的经济效益.无线网络的飞速发展和物联网(InternetofThings,IoT[4])的广泛推崇,使得研究人员将云计算的概念引入无人机领域,形成“云+无人机”的概念.追溯到20世纪90年代,东京大学Inaba[5]提出了远程大脑的概念,即提议将机器人与计算机通过万维网连接———发展“网络机器人”.这一概念实现的典型案例是Goldberg等人[6]通过Internet浏览器远程控制网络中的机器人;随后,Kim等人[7]采用UDP协议连接无线传感器和群体机器人实现基于网络连接的控制.网络机器人仅仅是通过网络连接实现多机器人的简单相加,并没有从根本上解决机器人的物理瓶颈问题.在2010年的Humanoids大会上,卡耐基梅隆大学的Kuffner博士[8]首次提出“云机器人”的概念,即机器人可利用互联网上的云服务器进行分布式并行计算和大数据存储、分析与处理,机器人本身无需能力扩展,若想获取信息,连接服务器即可.基于这一概念,很多研究尝试将繁复的计算卸载到云端来解决机器人自身存储计算能力受限的问题.Arumugam等人[9]在Hadoop[10]集群上采用Map/Reduce[11]计算框架来增强机器人算法执行的有效性,但该方法没有给出可靠的通信机制.Hunziker等人[12]设计了一个开源的平台即服务机器人应用框架Rapyuta,提供了一种安全的可定制化的计算环境以帮助机器人将繁重的计算任务转移到云端.上述两种方法仅专注于解决机器人计算层级的问题,协同控制的讨论没有深入.Kuriki等人[13]基于c共识协议提出了一种具有避碰能力的协同编队控制结构,其核心关注点在于如何解决多无人机间的避碰问题.随着无人机角色在机器人领域的不断增强,人们开始将无人机部署到云端.Gharibi等人[14]基于IoT(InternetofThings[4])提出了IoD(InternetofDrones)的概念模型并规划了一个设计框架.Koub a等人[15]提出了一个软件架构DroneMapPlanner(DMP),通过具体的实现和实验证明了IoD,即基于互联网的无人机云处理架构,但该方法一次仅支持访问控制一架无人机.Lin等人[16]提出将无人机连接到GoogleEarth云服务,并将数据存储于MySQL数据库中,用户通过Web浏览器可访问数据库中的无人机信息,该方法没有阐明多无人机控制问题,且通过数据库监控无人机将影响系统的实时响应能力.Sanchez Lopez等人[17]提出了一种在复杂环境中构建自主无人机系统的控制架构Aerostack,Aerostack具有管理大量无人机的能力,但没能实现多无人机间的全局调控.Sampedro等人[18]设计了一个全局协调器GlobalMissionPlanner(GMP),弥补了Aerostack无法协调多无人机执行任务的缺陷,其可动态地将任务分配给每架无人机,同时监控无人机集群行为,但与负责上层任务分配的本地协调器AgentMissionPlanner(AMP)的异步通信却制约着整个系统的实时性.Dong等人[19]提出了一种基于局部邻域信息的多无人机编队控制协议,研究多旋翼无人机系统的编队 围堵控制理论,但控制平台是基于局部拓扑结构实现的,缺乏多无人机系统的全局信息.Zhao等人[20]探讨了无人机通信与控制一体化的通道跟踪、协同通信、自定位、无缝覆盖、轨迹设计、资源配置等技术问题,仅从通信的视角分析了多无人机控制所面临的挑战和机遇.Pham等人[21]通过一个基于分布式控制的多无人机集群,可在野火蔓延的情况下协同跟踪动态环境,但系统需要预规划编辑,灵活性一般.Zou等人[22]针对无人机编队队形变换问题设计的协同控制方法,其网络通信拓扑是弱连接的,数据交互会出现延时现象.Yu等人[23]研究了多无人机在执行器故障和输入饱和条件下的分布式容错控制问题,采用图论和滑模观测器SlidingModeObserver(SMO)相结合的方法增强了系统的可靠性,但忽略了无人机间信息共享的实时性等问题.一些无人机的开源控制平台如QGroundControl①和DJIFlightHub②等,虽然都支持基本的飞行控制功能,但系统启用的飞行模式单一,且不具备通用性.CoUAV是由Wu等人[24]面向多无人机协作设计的一个通用控制监控平台,CoUAV基于Linux核作为中间件实现与无人机的交互,虽然屏蔽了机组硬件上的差异,但无云架构支撑,通用性不强且服务应用范围有限.综上所述,基于云架构实现多无人机的数据共享和协同控制是扩展无人机应用场景、提升动态环境任务需求的有效方法,但系统集成对网络通信的实时性和稳定性以及控制协同的有效性均提出了新的挑战及要求.多无人机联合旨在“1+1>2”,实现多无人机协同飞行控制的目标拟解决以下几个关键问题:(1)多无人机协同控制的有效性;(2)多源异构数据的高4532计 算 机 学 报2020年①②QGroundControl.http://qgroundcontrol.com/DJIFlightHub.https://www.dji.com/flighthub效存储、处理及信息共享;(3)通信链路的稳定性及数据响应的实时性.针对上述问题和已有研究存在的不足如数据实时处理能力差、计算资源匮乏、无人机间数据分离、难以实施全局协同调度等,本文提出了面向多无人机协同飞行控制的云系统架构(Multi UAVOrientedCooperativeControlSystemArchitectureBasedonCloud,UAV3CA),其原理是通过云服务器连接无人机,并在平台即服务(Platform as a Service,PaaS[25])层将无人机资源封装并提供公开接口;云控制端根据预执行的任务对无人机进行分组并做有机组合,通过远程过程调用(RemoteProcedureCall,RPC)获取无人机及其传感器上的数据,并将数据卸载到云端做高效存储,实现多无人机间数据的交互及共享;云计算节点作为无人机集群的远程CPU,运用其强大的计算能力对无人机回传的数据进行处理,生成控制命令并将其发送到无人机上完成远程控制,实现对多无人机的联合部署、飞行调度以及通力协作.图1 UAV3CA的系统架构图2 面向多无人机协同飞行控制的云系统架构多无人机协同飞行是未来机器人在人工智能领域发展的必然趋势.通过将多架低成本的无人机组合并部署到云端,可弥补单无人机因体积小、续航时间短等自身条件限制所带来的能力不足及缺陷,使得无人机集群具备单无人机硬件无法超越的计算、存储及处理能力.传统的无人机集群技术难以满足日趋复杂的任务场景需求,如(1)稳定的通信链路以支持数据实时传输,(2)状态数据和感知信息强大的存储、计算能力,(3)全局最优解的决策生成及命令部署,(4)系统控制的协同性、智能性、灵活性等.鉴于此,本文提出一种面向多无人机协同飞行控制的云系统架构UAV3CA,为无人机协作应用创建一个开发原型系统.UAV3CA采用互联网将无人机与云及云控制端连接,实现多无人机之间的超视距连接.基于基础通信链路,无人机将承载的传感器数据和自身的状态信息同步到云端,而云控制端根据目标任务间接驱动无人机协同飞行.作为无人机与控制端的中间桥梁,云端一方面对无人机卸载下来的感知数据进行处理,并公开且共享无人机上的状态信息;另一方面按照控制端的要求进行数据分析,将生成的控制命令经封装后传递给无人机的飞控系统.图1所示为UAV3CA的系统架构图,下面将详细阐述系统553212期史殿习等:面向多无人机协同飞行控制的云系统架构架构的组成部分及软件功能的具体实现.UAV3CA系统架构主要由无人机执行层、云端层和操控层组成,针对不同的层级和功能需求,本文采用模块化松散耦合的方式,设计了三个软件功能逻辑节点———无人机节点、云控制节点和协同控制节点.下面进行详细介绍.2 1 无人机执行层无人机是系统最终的交互目标,其代表一组资源,可向外部应用提供服务.硬件层上,本文通过开源机器人操作系统ROS[26]的一些标准服务如硬件抽象、进程间消息传递等,将无人机资源对外服务化;通过另一种资源抽象方式———微型飞行器轻量级消息编组库MAVLink①的不同传输方式如TCP、UDP、USB等,使无人机与地面控制站交换预定义消息.为减少因重复性操作造成的资源浪费,降低系统开发的经济成本,缩短开发周期,本文基于Gazebo运行模拟环境场景,并通过PC机上SITL②模拟器模拟仿真无人机.仿真无人机上载有飞行控制器程序ArduPilot③,与飞行控制相关的状态信息和环境感知数据可从仿真无人机的飞行动力学模型中模拟收集,未来用于系统框架模型的仿真实验测试.软件层上,无人机被抽象为一个逻辑节点.首先通过ROS的发布/订阅机制和软件包MAVROS[26]的解析封装功能,向无人机发送MAVLink消息,为开发人员提供高级接口.其次基于ROSBridge[27]软件包,开发人员可在非ROS系统和ROS系统之间进行交互式通信,本文在操控层(非ROS系统,参见2.3节内容)上采用Websocket④协议格式发送数据,并由ROSBridge进行转换发送给相关的ROS主题;反之,从ROS主题获取的无人机上数据经ROSBridge转换回传到操控层.另外,无人机节点还包含飞行控制模块和数据感知采集模块两个部分.飞行控制模块用于控制无人机的基本动作,通过解析ROS发来的MAVLink指令消息包,将生成的预期飞行动作与无人机当前的姿态和位置进行比较,并经飞行控制算法计算出无人机的运动偏移量,制导无人机飞行.数据感知采集模块,用于收集无人机上的数据,其中包括无人机的硬件信息、客户端验证数据信息、无人机状态同步信息以及传感器采集信息等.基于ROS的消息发布/订阅机制和ROSBridge工具的代理转发,数据感知采集模块可与云控制节点(参见2.2节内容)的数据感知接收模块进行数据交互.2 2 云端层云端层是UAV3CA系统架构设计的重点,是操控层与无人机执行层间连接控制的桥梁,具有无人机远程“CPU”之美誉,是多无人机协同飞行的核心运行层.为了实现各组件间的松散耦合且功能需求可扩展,本设计将云端层细化为两个部分,即无人机影射层和云核心层,另外在软件层上抽象一个逻辑节点———云控制节点.2.2.1 无人机影射层无人机影射层旨在将无人机抽象为云端资源,为开发者提供完全独立于无人机具体特征的操作方法.无人机影射层在物理无人机和云之间起桥接作用,一方面将无人机状态及感知数据转移到云端进行处理,另一方面将云端计算、分析的结果发送给无人机作任务调度.无人机影射层包含以下两个基本组件:(1)无人机接入组件,亦称为底层通信模块.无人机可选择多种网络协议与控制端交互数据,但为了避免云端部署ROS时发生中心节点Master过载的宕机现象,本文在云端(非ROS端)采用ROSBridge与无人机(ROS端)发送消息,对应于无人机执行层建立Websocket协议通信.当无人机申请接入到云服务器时,首先需要经过身份验证.身份一旦验证成功,云服务器将通过线程池与无人机保持连接,且为有效处理不同格式的数据和指令信息,通信模块被设计为多线程服务模式.UAV3CA设计是面向多无人机和多控制端服务的,访问请求必然会存在冲突.为避免此类现象发生,本文将在控制端与无人机之间设置一定的匹配权限,即先对无人机进行分组,然后在控制端设置不同的组权限来分层管理无人机信息,实现对无人机资源的有效管理.假设存在一种情形,即某一时刻有多个用户同时访问一架无人机,由于当前请求频繁且即时并发数据量过大,网络空间通信链路会因带宽资源有限而发生过载.为此,系统设计嵌入了一个网络分发器,将系统多源请求数据进行存储转发,并采取网络代理的方式把MAVLink消息和ROSBridge消息广播到其它端口.(2)无人机抽象组件,是对无人机及其上资源,6532计 算 机 学 报2020年①②③④MAVLink.http://qgroundcontrol.org/mavlink/startSITLsimulator(softwareintheloop)ArduPilotautopilotsuite.http://ardupilot.com/TheWebsocketProtocol.https://tools.ietf.org/html/rfc6455包含与无人机相关的信息以及可执行的操作,进行抽象并封装,具体包含:①远程控制器.封装为可在无人机上执行的所有MAVLink命令消息以及和与ROS主题相关的无人机动作指令,如起飞、降落、悬停、前进、拍照等;②任务控制器.以协助无人机自主完成任务,其可以运行单个任务,也可依时间轴运行一系列连续的任务;③传感器管理器.用统一的方式集中管理传感器信息,以解决因无人机异质性、传感器多样性而产生的数据不一致性,以及ROS中基于不同主题发布消息而产生的交互性冲突;④无人机影射文件.通过一个JSON格式的文件反映物理世界中无人机的形态.2.2.2 云核心层云核心层是UAV3CA系统框架的核心,具体包含以下组件:(1)数据存储工具组件,为来自无人机的各种数据提供存储服务.无人机系统中需要存储、检索和访问不同类型的数据,且根据数据类型、结构及应用需求的不同采用不同的数据库.如SQL数据库存储位置坐标、三维速度、姿态欧拉角、方向、环境温度等结构化数据;NoSQL数据库存储无人机设备信息、认证信息、图像及视频等非结构化数据;对于及时响应的指令数据,系统采用近实时处理的Storm流,而对于实时性要求不高的大容量数据,系统在Hadoop[10]框架上使用HDFS[28]文件系统读取数据,并采用分布式编程模型Map/Reduce[11]对数据进行并行处理.(2)虚拟环境组件.虚拟技术已经成为构建服务器集群的重要手段.本文选择Docker[29]和Kubernetes[29]进行集中式服务器的管理和调度,其中Docker负责提供虚拟容器运行时环境,Kubernetes负责管理、编排和调度由Docker引擎构建的容器,对服务器集群进行资源整合和调度.(3)智能引擎组件.无人机在任务执行的过程中需要智能算法的支持,如任务匹配、路径规划、动态调度等.智能引擎组件基于Hadoop集群、采用分布式计算框架Map/Reduce实现对大规模数据的并行计算和分析.这种远程“大脑”的控制模式,可支撑多无人机系统智能协同运行.2.2.3 云控制节点云控制节点上装有Ubuntu操作系统,但不部署ROS,以规避Master的中心节点效应.为实现对多无人机的协同控制,云控制节点设计了多个功能服务模块.(1)数据感知接收模块.使用消息发布/订阅机制从数据感知采集模块中订阅与主题相关的数据信息,并依类型的不同对数据作分发处理,如将入网验证信息转发至认证管理模块,状态数据转发至状态同步模块,传感器数据转发至误差检测模块.(2)认证管理模块.接收来自数据感知接收模块的无人机IP地址以及用于认证的密钥Key,通过和系统内置约定的安全验证码进行比对匹配来确定请求入网的无人机是否合法.(3)状态同步模块.为无人机协同控制提供实时且稳定的无人机状态数据.通过Timing机制定期从数据感知接收模块中获取无人机的状态数据,同时对无人机的特定状态进行实时监听,以保持无人机影射文件内容与物理无人机真实状态的同步性.(4)误差检测模块.将从数据感知接收模块中获取的传感器数据与预期目标指令进行对比,鉴定无人机是否成功接收到命令、是否成功执行命令且达到预期目标.MAVLink协议本身没有反馈机制,因此,对于控制端的即时命令,系统每发出一次DO命令,误差检测模块就检测一次无人机状态,通过反复发送、反复检测,直至确认无人机执行该DO命令为止.而对于过程执行命令,系统不作强精度要求,仅预设误差容限范围,即通过反复计算和调整无人机当前状态和预期目标的差值,使其降至误差容限范围内来表明命令执行成功.(5)基于影射文件的命令控制模块.影射文件在认证管理模块认证成功且分组编成后生成,是存储在云服务器上物理无人机的数字孪生,反映物理世界中无人机实时状态(如飞行模式、当前位置等)的JSON格式文件,可视为虚拟无人机.影射文件将发送给无人机的命令执行序列按时间戳顺序先缓存再发送.物理无人机和虚拟无人机通过状态同步模块推送同步状态信息,即无人机将实时状态上传至影射文件,控制端通过影射文件将期望的状态指令发送给无人机.基于影射文件的命令控制模块不仅可以克服因网络不稳定性而导致的无人机频繁上线、掉线现象以及控制命令的时间顺序误差,而且其内置的存储转发机制可以减轻由多个控制节点向同一架无人机重复请求访问而引发的网络负载过压问题.(6)坐标转换模块.是将一个参考系下的坐标点转换为另一个参考系下的坐标点,以统一系统内部的控制调用接口.(7)服务提供模块.是对无人机及其上资源封753212期史殿习等:面向多无人机协同飞行控制的云系统架构装并向外部提供统一风格接口的服务.其通过面向资源的接口设计提供三种类型的服务:无人机自身状态数据UAVInfo,如方向、速度等;可提供资源服务UAVService,如传感器数据、雷达数据等;执行动作参数UAVAction,如运动轨迹改变参数等.2 3 操控层操控层建立在云端层之上,云核心层给予操控层强大的数据计算与分析能力支撑;当有任务下达,操控层生成决策部署,并通过云端层间接控制多无人机协同飞行.操控层为无人机飞控程序提供了两种类型的接口:Websocket和Webservice,通过这两种接口,操控层可以同时访问多个无人机,或基于云端层提供的服务为无人机设置参数并执行协同飞行算法.Websocket是一种全双工通信协议,一方面允许无人机主动向客户端同步信息,另一方面允许操控层通过云端向无人机推送指令.ROSBridge包中的ROSJS库同样支持Websocket.当无人机执行层MAVLink消息包进入云端层时,将首先通过套接字被接收,然后由网络分发器经Websocket发送到操控层.Webservice接口用于开发实时控制、任务控制、无人机管理以及其他非连续数据流等应用.协同控制节点是建立在操控层上的可公开调用无人机资源的节点,基于云控制节点中的功能模块,即通过统一接口封装屏蔽不同无人机的异质性,降低传感器数据的异构性,无人机之间可实现数据的交互与共享.基于操控层上的Web[30]协议,协同控制节点通过HTTP接口向外部提供无人机的资源和服务,如通过HTTPGET方式获取无人机上的资源;通过HTTPPOST方式请求服务;通过HTTPPUT方式更新无人机的ID信息;通过HTTPDELETE方式中止无人机执行当前任务或移除任务.基于资源公开和数据共享,协同控制节点可面向具体的任务需求,调用一定的智能算法对在线的多架无人机进行匹配、分组和调度,使之协同飞行并完成期望目标任务.综上所述,UAV3CA设计完成了一个面向多无人机协同飞行控制的云系统框架,其从通信链路建设开始,到基础设施和功能组件服务模块的中间件设计,从底层抽象到面向应用,最终在控制端实现了对多无人机终端的远程协同飞行控制.3 系统框架设计的关键技术机制多无人机协同控制是建立在无人机到云端的可靠连接之上,基于连接,先将无人机上的数据卸载到云端,通过云核心层对多源异构数据进行处理、存储、计算和分析,并将生成的指令回传至无人机实施控制.而设计的核心控制层将来自不同无人机上的数据信息进行交互共享,参考任务作统一规划、调度,控制多无人机协同飞行,共同完成目标.因此,面向多无人机协同飞行控制的云系统架构UAV3CA提出了三种嵌入式关键技术机制:(1)基于ROS发布订阅的无人机连接机制;(2)基于MAVLink协议的无人机控制机制;(3)基于RESTful[31]架构的无人机数据共享机制.下面详细阐述这三种关键机制.3 1 基于犚犗犛发布订阅的无人机连接机制无人机上装载ROS[26],一方面可重用开源的项目库,另一方面还可为硬件资源提供软件抽象.目前,ROS已广泛应用于机器人的程序开发,但却缺乏通过互联网来远程控制和监控机器人的原生支持.因此,本文在ROS发布/订阅的机制上通过引入ROSBridge和代理服务器的方法,提出一种新的无人机连接机制,以支持UAV3CA框架能够快速创建无人机实例,安全可靠的连接无人机与云端,对无人机进行硬件级别的认证,并基于策略的授权,使控制端对特定主题拥有读写权限,以保证安全.3.1.1 基于ROSBridge的去中心化方法ROS是一个分布式系统,其将机上每一个应用程序表征为一个节点(Node),节点之间采用基于主题(Topic)的发布(Publish)和订阅(Subscribe)机制来实现消息传递,不同的ROS程序间通过RPC(RemoteProcedureCall)方式建立通信并传输数据.为了简单,云端可选择部署ROS,但分布式ROS系统管理是一种基于Master主节点的“集中式”管理模式,如果将云端设置为Master主节点,且运行在Internet上具有公共IP地址的服务器上,进而通过基于发布/订阅主题和服务的方式实现无人机和云端以及无人机之间的通信访问来维护网络中所有其他节点的信息,必将导致整个网络强烈依赖于中心节点Master,极大地影响系统的实时性和稳定性,具体表现为:(1)当多个无人机同时申请接入网络时,主节点Master会因负载过高而导致崩溃,影响整个系统的运行并且难以恢复;(2)当网络系统中存在大量主题和数据时,本地数据传输会产生延迟,远程数据传输会因网络带宽和处理能力而受限.因此,为保证无人机远程控制的稳定性,本文设计采用一种基于ROSBridge的去中心化方法来实现无8532计 算 机 学 报2020年。
教育部关于集成光电子学等14个国家重点实验室主任和学术委员会主任聘任的通知
文章属性
•【制定机关】教育部
•【公布日期】2008.05.21
•【文号】教技函[2008]103号
•【施行日期】2008.05.21
•【效力等级】部门规范性文件
•【时效性】现行有效
•【主题分类】教育综合规定,基础研究与科研基地
正文
教育部关于集成光电子学等14个国家重点实验室主任和学术
委员会主任聘任的通知
(教技函〔2008〕103号)
部属有关高等学校:
根据《国家重点实验室建设与管理暂行办法》和《高等学校重点实验室建设与管理暂行办法》的有关规定,通过公开招聘和严格评审,有关高校确定了重点实验室主任的推荐人选,并推荐了重点实验室学术委员会主任人选。
经研究,我部同意聘任罗毅等14位专家分别担任集成光电子学国家重点实验室等相应实验室主任,聘任黄永箴等14位专家担任国家重点实验室学术委员会主任(名单见附件)。
希望各校努力为实验室的建设和发展创造条件,营造良好的学术氛围和创新环境,进一步明确实验室主任在任期内的职责,充分发挥学术委员会的作用,加强对实验室的规范化管理和监督。
各实验室要坚持“开放、流动、联合、竞争”的运行机制,面向科技前沿和国家重大需求,加强原始性创新和竞争前高技术研究,攀登
世界科技高峰;大力培养优秀的中青年学术带头人,加强创新团队建设,广泛开展国际交流与合作,切实提高实验室学术竞争力和自主创新能力。
附件:国家重点实验室主任和学术委员会主任聘任名单
教育部
二○○八年五月二十一日附件:。
第二届全国开源情报技术大会暨开源情报技术专委会(筹)第三次全体会议成功举办无【期刊名称】《中文信息学报》【年(卷),期】2022(36)12【摘要】由中国中文信息学会开源情报技术专业委员会(筹)主办、中国传媒大学承办的第二届全国开源情报技术大会于2022年12月3日线上举办。
会议嘉宾围绕开源情报技术,从理论到方法、从机遇到挑战,开展学术报告与探讨。
大会由专委会副主任、中国传媒大学科学研究处副处长殷复莲主持。
大会主席、中国传媒大学副校长王晖教授在开幕词中表示,开源情报技术是完善国家治理体系和提升国家治理能力的重要方法和手段,可为公共管理提供重要的数据基础和决策支撑,中国传媒大学开展了大量的与开源情报数据库以及开源情报技术相关的研究工作,愿意与专委会同向而行,致力于为开源情报技术的研究提供土壤,为学者交流提供渠道、为行业发展输送高层次人才。
中国中文信息学会秘书长孙乐研究员在致辞中介绍了学会的初创背景和历史沿革,对本次大会的筹备和组织工作给予了充分肯定,并祝贺大会顺利召开。
【总页数】1页(PF0003)【作者】无【作者单位】中国中文信息学会;开源情报技术专委会【正文语种】中文【中图分类】TP3【相关文献】1.第五届全国工业过程测量控制和自动化标准化技术委员会(SAC/TC124)第一次全体会议,第二届全国测量、控制和实验室电器设备安全标准化技术委员会(SAC/TC338)第一次全体会议,第一届全国实验室仪器及设备标准化技术委员会(SAC/TC526)第三次全体会议成功召开2.第三次全国纺织科技情报工作会议暨纺织科技情报站网建设二十周年大会在青岛召开3.第二届全国可回收锚杆技术研讨会暨锚杆回收技术与产业联盟(筹)成立大会成功召开4.中国中文信息学会开源情报技术专业委员会(筹)发起会议成功举办5.上海市科学技术情报学会成功召开学术年会暨2015年上海科学技术情报成果奖颁奖大会因版权原因,仅展示原文概要,查看原文内容请购买。