PQ分解潮流算法简介复习过程
- 格式:ppt
- 大小:468.00 KB
- 文档页数:16

一、PQ 分解法的原理P —Q 分解法是牛顿-拉夫逊法潮流计算的一种简化方法。
P-Q 分解法利用了电力系统的一些特有的运行特性,对牛顿-拉夫逊法做了简化,以改进和提高计算速度。
的基本思想是根据电力系统实际运行特点:通常网络上的电抗远大于电阻,则系统母线电压幅值的微小变化对用功功率的改变影响很小。
同样,母线电压相角的的改变对无功功率的影响较小.因此,节点功率方程在用极坐标形式表示时。
它的修正方程式可简化为:00P H Q L U U θ∆∆⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥∆∆⎣⎦⎣⎦⎣⎦将P 、Q 分开来迭代计算,因此大大地减少了计算工作量.但是H 、L 在迭代过程中仍将不断变化,而且又都是不对称矩阵。
对牛顿法的进一步简化。
为把上式中的系数矩阵简化成迭代过程中不变的对称矩阵。
在一般情况下线路两端的电压相角ij θ是不大的,因此可以认为:cos 1sin ij ij ijijG B θθ≈2ii ii Q U B考虑到上述关系,可以得到:ij i ij j ij i ij jH U B U L U B U ==节点的功率增量为:11(cos sin )(sin cos )ni is i j ij ij ij ij j ni is i j ij ij ij ij j P P U U G B Q Q U U G B θθθθ==∆=-+∆=--∑∑P —Q 分解法的特点:以一个n-1阶和一个n —m —1阶线性方程组代替原有的2n —m —1阶线性方程组;修正方程的系数矩阵B'和B”为对称常数矩阵,且在迭代过程中保持不变;P —Q 分解法具有线性收敛特性,与牛顿—拉夫逊法相比,当收敛到同样的精度时需要的迭代次数较多。
二、程序说明1.数据说明Branch1。
txt:支路参数矩阵第1列为支路的首端编号;第2列为支路的末端编号(首端编号小于末端编号);第3列为之路的阻抗;第4为支路的对地容抗;第5列为支路的变比;第6列为折算到那一侧的标志Branch2。
ieee30pq分解法潮流计算潮流计算是电力系统中十分重要的一项分析工作,用于计算电力系统中各个节点的电压幅值和相角,以及各个支路的电流大小和相角。
这对于电力系统的运行和调度具有重要意义。
IEEE30PQ系统是一个经典的潮流计算案例,该系统有30个节点,其中包括负荷节点(PQ节点)和发电机节点(PV节点)。
以下将详细介绍IEEE30PQ系统的潮流计算方法。
一、潮流计算预备工作在进行潮流计算之前,需要对电力系统进行建模。
首先,将各个节点连接成一个拓扑结构,构成潮流计算图。
其次,确定系统中的潮流方向和节点类型。
IEEE30PQ系统中,负荷节点为PQ节点,发电机节点为PV节点。
同时,还需要确定各个节点的初始电压值和相角。
二、节点功率方程根据潮流计算的目标,可以得到节点功率方程。
在IEEE30PQ系统中,各个节点的功率方程可以表示为:节点m是PQ节点:Pm = Vm * ∑(Vm * Gkm * cos(θm - θk) + Vm * Bkm * sin(θm- θk))Qm = -Vm * ∑(Vm * Gkm * sin(θm - θk) - Vm * Bkm * cos(θm - θk))节点m是PV节点:Pm = Vm * ∑(Vm * Gkm * cos(θm - θk) + Vm * Bkm * sin(θm- θk))其中,Pm和Qm分别表示节点m的有功功率和无功功率,Vm和θm分别表示节点m的电压和相角,Gkm和Bkm分别表示节点m和节点k之间的导纳。
三、雅可比矩阵为了求解节点功率方程,需要构建雅可比矩阵。
雅可比矩阵是由节点功率方程对电压和相角的一阶导数构成的矩阵。
在IEEE30PQ系统中,节点功率方程包含有功和无功两种功率,因此雅可比矩阵也是一个2n×2n的矩阵。
其中,n为节点的数量。
四、潮流计算算法潮流计算可以采用迭代的方法,使节点功率方程逐步趋近于收敛。
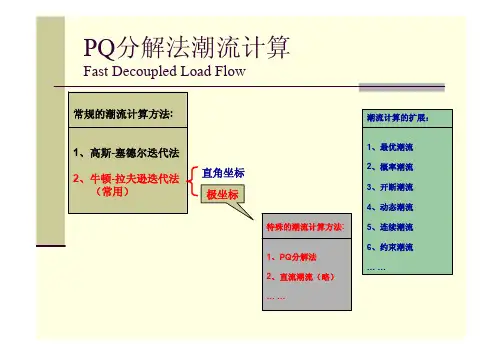
其中,最常用的潮流计算算法是牛顿-拉夫逊法(Newton-Raphson)和高斯-赛德尔法(Gauss-Seidel)法。

电力系统潮流分析与计算设计(P Q分解法)电力系统潮流分析与计算设计(p-q分解法)摘要潮流排序就是研究电力系统的一种最基本和最重要的排序。
最初,电力系统潮流排序就是通过人工手算的,后来为了适应环境电力系统日益发展的须要,使用了交流排序台。
随着电子数字计算机的发生,1956年ward等人基本建设了实际可取的计算机潮流排序程序。
这样,就为日趋繁杂的大规模电力系统提供更多了极其有力的排序手段。
经过几十年的时间,电力系统潮流排序已经发展得十分明朗。
潮流排序就是研究电力系统稳态运转情况的一种排序,就是根据取值的运转条件及系统接线情况确认整个电力系统各个部分的运转状态,例如各母线的电压、各元件中穿过的功率、系统的功率损耗等等。
电力系统潮流排序就是排序系统动态平衡和静态平衡的基础。
在电力系统规划设计和现有电力系统运转方式的研究中,都须要利用电力系统潮流排序去定量的比较供电方案或运转方式的合理性、可靠性和经济性。
电力系统潮流计算分为离线计算和在线计算,离线计算主要用于系统规划设计、安排系统的运行方式,在线计算则用于运行中系统的实时监测和实时控制。
两种计算的原理在本质上是相同的。
实际电力系统的潮流技术主要使用pq水解法。
1974年,由scottb.在文献(@)中首次提出pq分解法,也叫快速解耦法(fastdecoupledloadflow,简写为fdlf)。
本设计就是使用pq水解法排序电力系统潮流的。
关键词:电力系统潮流排序pq水解法第一章概论1.1详述电力系统潮流计算是研究电力系统稳态运行情况的一种计算,它是根据给定的运行条件及系统接线情况确定整个电力系统各个部分的运行状态,如各母线的电压、各元件中流过的功率、系统的功率损耗等等。
电力系统潮流计算是计算系统动态稳定和静态稳定的基础。
在电力系统规划设计和现有电力系统运行方式的研究中,都需要利用电力系统潮流计算来定量的比较供电方案或运行方式的合理性、可靠性和经济性。
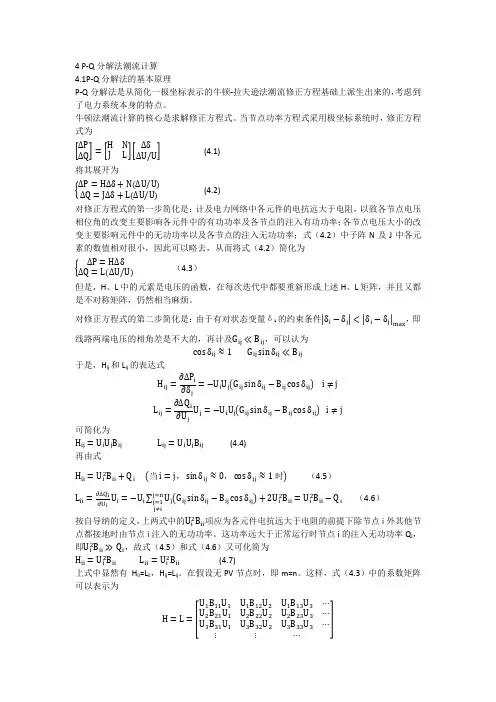
4 P-Q 分解法潮流计算 4.1P-Q 分解法的基本原理P-Q 分解法是从简化一极坐标表示的牛顿-拉夫逊法潮流修正方程基础上派生出来的,考虑到了电力系统本身的特点。
牛顿法潮流计算的核心是求解修正方程式。
当节点功率方程式采用极坐标系统时,修正方程式为[∆P ∆Q ]=[H N J L ][∆δ∆U/U ] (4.1)将其展开为{∆P =H∆δ+N(∆U/U)∆Q =J∆δ+L(∆U/U)(4.2) 对修正方程式的第一步简化是:计及电力网络中各元件的电抗远大于电阻,以致各节点电压相位角的改变主要影响各元件中的有功功率及各节点的注入有功功率;各节点电压大小的改变主要影响元件中的无功功率以及各节点的注入无功功率;式(4.2)中子阵N 及J 中各元素的数值相对很小,因此可以略去,从而将式(4.2)简化为 {∆P =H∆δ∆Q =L(∆U/U)(4.3) 但是,H 、L 中的元素是电压的函数,在每次迭代中都要重新形成上述H 、L 矩阵,并且又都是不对称矩阵,仍然相当麻烦。
对修正方程式的第二步简化是:由于有对状态变量δi 的约束条件|δi −δj |<|δi −δj |max,即线路两端电压的相角差是不大的,再计及G ij ≪B ij ,可以认为cos δij ≈1 G ij sin δij ≪B ij 于是,H ij 和L ij 的表达式H ij =∂∆P i∂δj=−U i U j (G ij sin δij −B ij cos δij ) i ≠j L ij =∂∆Q i∂U j U j=−U i U j (G ij sin δij −B ij cos δij ) i ≠j 可简化为H ij =U i U j B ij L ij =U i U j B ij (4.4) 再由式H ii =U i 2B ii +Q i (当i =j ,sin δij ≈0,cos δij ≈1时) (4.5) L ii =∂∆Q i ∂U iU i =−U i ∑U j (G ij sin δij −B ij cos δij )+2U i 2B ii =U i 2B ii −Q i j=nj=1j≠i(4.6)按自导纳的定义,上两式中的U i 2B ii 项应为各元件电抗远大于电阻的前提下除节点i 外其他节点都接地时由节点i 注入的无功功率。

目录前言........................................................................................................................... - 1 -一、PQ分解法的极坐标表示及简化算法....................................................... - 2 -二、PQ分解法的直角坐标解法........................................................................ - 8 -三、基于因子表法的PQ分解法..................................................................... - 10 -四、PQ分解法潮流计算的简化算法.............................................................. - 11 -五、小结........................................................................................................... - 14 - 参考文献................................................................................................................. - 16 -前言潮流计算是电力系统中的一种最基本计算,通过已给定的运行条件确定系统中的运行状态,如各条母线上的电压、网络中的功率分布及功率损耗等。
电力系统中常用的PQ分解法派生于以极坐标表示的牛顿—拉夫逊法,其基本思想是把节点功率表示为电压向量的极坐标形式,以有功功率误差作为修正电压向量角度的依据,以无功功率误差作为修正电压幅值的依据,把有功和无功分开进行迭代其'代替原主要特点是以一个(n-1)阶和一个m阶不变的、对称的系数矩阵BB'',来的(n+m-2)阶变化的、不对称的系数矩阵M,以此提高计算速度,降低对计算机贮存容量的要求。
PQ分解法潮流计算的基本步骤
形成系数矩阵BB′′′、,并求其逆矩阵。
设各节点电压的初值为(0)iδ(i=1,2,…,n,i≠s)和(0)iU(i=1,2,…,m,i≠s).
3)通过有功功率的不平衡方程计算有功功率的不平衡量(0)iP∆,从而求出(0)i(0)iUP∆(i=1,2,…,n,i≠s)。
4) 解修正方程式,求各节点电压相位角的变量(0)iδ∆(i=1,2,…,n,i≠s)
5) 求各节点电压相位角的新值(0)i(0)i(1)iδδδ∆+=(i=1,2,…,n,i≠s)。
6) 通过无功功率的不平衡方程计算无功功率的不平衡量(0)iQ∆,从而求出(0)i(0)iUQ∆(i=1,2,…,m,i≠s)。
7) 解修正方程式,求各节点电压大小的变量(0)iU∆(i=1,2,…,m,i≠s)。
8) 求各节点电压大小的新值(0)i(0)i(1)iUUU∆+=(i=1,2,…,m,i≠s)。
9) 运用各节点电压的新值自第三步开始进入下一次迭代。
10) 计算平衡节点功率和线路功率及网损。
通过利用C/C++语言,编写了基于PQ分解法的任意节点电力系统交流潮流计算程序。
在程序中电力系统的原始数据(如节点信息、支路信息、发电机和负荷信息等)从数据文件输入,计算结果(如节点电压、支路功率分布和网损等)输出到数据文件。
第四节 PQ 分解法潮流计算一 、PQ 分解法的基本方程式60年代以来N —R 法曾经是潮流计算中应用比较普遍的方法,但随着网络规模的扩大(从计算几十个节点增加到几百个甚至上千个节点)以及计算机从离线计算向在线计算的发展,N —R 法在内存需要量及计算速度方面越来越不 适应要求。
70年代中期出现的快速分解法比较成功的解决了上述问题,使潮流计算在N —R 法的基础上向前迈进了一大步,成为取代N —R 法的算法之一。
快速分解法(又称P —Q 分解法)是从简化牛顿法极坐标形式计算潮流程序的基础上提出来的。
它的基本思想是根据电力系统实际运行特点:通常网络上的电抗远大于电阻值 ,则系统母线电压副值的微小变化V ∆对母线有功功率的改变P ∆影响很小。
同样,母线电压相角的少许改变θ∆,也不会引起母线无功功率的明显改变Q ∆。
因此,节点功率方程在用极坐标形式表示时,它的修正方程式可简化为:⎥⎦⎤⎢⎣⎡∆∆⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡∆∆V V L H Q P /00θ (4—19) 这就是把2(n —1)阶的线性方程组变成了两个n —1阶的线性方程组,将P 和Q 分开来进行迭代计算,因而大大地减少了计算工作量。
但是,H ,L 在迭代过程中仍然在不断的变化,而且又都是不对称的矩阵。
对牛顿法的进一步简化(也是最关键的一步),即把(4—19)中的系数矩阵简化为在迭代过程中不变的对称矩阵。
在一般情况下,线路两端电压的相角ij θ是不大的(不超过10○~20○)。
因此,可以认为:⎭⎬⎫<<≈ij ij ij ij B G θθsin 1cos (4—20)此外,与系统各节点无功功率相应的导纳B LDi 远远小于该节点自导纳的虚部,即 ii iiLDi B V Q B <<=2 因而 ii i i B V Q 2<< (4—21) 考虑到以上关系,式(4—19)的系数矩阵中的各元素可表示为: ij j i ij B V V H = (i,j=1,2,………,n-1) (4—22)ij j i ij B V V L = (i,j=1,2,……………,m ) (4—23)而系数矩阵H 和L 则可以分别写成:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=------------11,1122,1111,1111,222222121211,1121211111n n n n n n n n n n n n V B V V B V V B V V B V V B V V B V V B V V B V V B V H =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------1211,12,11,11,222211,11211121n n n n n n n n V V V B B B B B B B B B V V V =11D D BV V (4—24)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=m mm m m m m m m m m m m V B V V B V V B V V B V V B V V B V V B V V B V V B V L 22122222212121121211111 =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡m mm m m m m m V V V B B B B B B B B B V V V2121222211121121=22''D D V B V (4—25) 将(4—24)和(4—25)式代入(4—19)中,得到[][][][][]θ∆'-=∆11D D V B V P[][][][]V B V Q D ∆-=∆''2用[]11-D V 和[]12-D V 分别左乘以上两式便得:[][][][][]θ∆-=∆-111'D D V B P V (4—26)[][][][]V B Q V D ∆-=∆-''12 (4—27)这就是简化了的修正方程式,它们也可展开写成:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∆∆∆----------1122111,12,11,11,222211,11211112211n n n n n n n n n n V V V B B B B B B B B B V P V P V P θθθ(4—28)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∆∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∆∆∆m mm m m m m m mV V V B B B B B B B B B V Q V Q V Q 212122221112112211 (4—29) 在这两个修正方程式中系数矩阵元素就是系统导纳矩阵的虚部,因而系数矩阵是对称矩阵,且在迭代过程中保持不变。
目录前言........................................................................................................................... - 1 -一、PQ分解法的极坐标表示及简化算法....................................................... - 2 -二、PQ分解法的直角坐标解法........................................................................ - 8 -三、基于因子表法的PQ分解法..................................................................... - 10 -四、PQ分解法潮流计算的简化算法.............................................................. - 11 -五、小结........................................................................................................... - 14 - 参考文献................................................................................................................. - 16 -前言潮流计算是电力系统中的一种最基本计算,通过已给定的运行条件确定系统中的运行状态,如各条母线上的电压、网络中的功率分布及功率损耗等。
电力系统中常用的PQ分解法派生于以极坐标表示的牛顿—拉夫逊法,其基本思想是把节点功率表示为电压向量的极坐标形式,以有功功率误差作为修正电压向量角度的依据,以无功功率误差作为修正电压幅值的依据,把有功和无功分开进行迭代其'代替原主要特点是以一个(n-1)阶和一个m阶不变的、对称的系数矩阵BB'',来的(n+m-2)阶变化的、不对称的系数矩阵M,以此提高计算速度,降低对计算机贮存容量的要求。
专业课程设计报告P-Q分解法潮流计算系别电气工程系专业班级09级电气4班学生XX 钟剑帆学号8指导教师房大中提交日期2011年11月12日目录P-Q分解法潮流计算1一、原理分析1二、程序流程1三、设计内容23.1 程序设计23.2.1 输入数据73.2.2 输出数据83.2.3 结果分析11四、心得总结12一、原理分析从潮流计算的基本方程出发,采用PQ分解法并通过建立矩阵的修正方程来依次迭代,逐步逼近真值来计算电网的电压和功率分布。
二、程序流程三、设计内容3.1 程序设计主函数Sbase_MVA=100.fid=fopen('Nodedata.txt');N=textscan(fid, '%s %u %d %f %f %f %f %f %f')fclose(fid);busnumber=size(N{1},1)for i=1:busnumberBus(i).name=N{1}(i);Bus(i).type=N{2}(i);Bus(i).no=i;Bus(i).Base_KV=N{3}(i);Bus(i).PG=N{4}(i);Bus(i).QG=N{5}(i);Bus(i).PL=N{6}(i);Bus(i).QL=N{7}(i);Bus(i).pb=N{8}(i);Bus(i).V=1.0;Bus(i).angle=0;endfid=fopen('Aclinedata.txt');A=textscan(fid, '%s %s %f %f %f %f')fclose(fid);aclinenumber=size(A{1},1)for i=1:aclinenumberAcline(i).fbname=A{1}(i);Acline(i).tbname=A{2}(i);Acline(i).Base_KV=A{3}(i);Acline(i).R=A{4}(i);Acline(i).X=A{5}(i);Acline(i).hB=A{6}(i);for k=1:busnumberif strcmp(Acline(i).fbname, Bus(k).name)Acline(i).fbno=Bus(k).no;endif strcmp(Acline(i).tbname, Bus(k).name)Acline(i).tbno=Bus(k).no;endendendfid=fopen('Transdata.txt');T=textscan(fid, '%s %f %f %s %f %f %f %f')fclose(fid);tansnumber=size(T{1},1)for i=1:tansnumberTrans(i).fbname=T{1}(i);Trans(i).fbBase_KV=T{2}(i);Trans(i).fbrated_KV=T{3}(i);Trans(i).tbname=T{4}(i);Trans(i).tbBase_KV=T{5}(i);Trans(i).tbrated_KV=T{6}(i);Trans(i).R=T{7}(i);Trans(i).X=T{8}(i);for k=1:busnumberif strcmp(Trans(i).fbname, Bus(k).name)Trans(i).fbno=Bus(k).no;endif strcmp(Trans(i).tbname, Bus(k).name)Trans(i).tbno=Bus(k).no;endendTrans(i).k=Trans(i).tbrated_KV*Trans(i).fbBase_KV/Trans(i).fbrated_KV/Trans(i).tbB ase_KV;tempx=Trans(i).fbrated_KV^2/Trans(i).fbBase_KV^2;Trans(i).X=tempx*Trans(i).X;Trans(i).R=tempx*Trans(i).R;end%N=0%Trans(1)%Trans(2)% for Y=G+ matrix[G,B,B2]=FormYmatrix(Bus,busnumber,Acline,aclinenumber,Trans,tansnumber) ;%B:=B';B2:=B"dlmwrite('Gmatrix.txt', G, 'delimiter', '\t','precision', 6);dlmwrite('Bmatrix.txt', B, 'delimiter', '\t','precision', 6);GBB2pause[JP,JQ]=FormJPQmatrix(Bus,B,B2,busnumber);JPiJP=-inv(JP)JQiJQ=-inv(JQ)pause%maxiteration=0for i=1:busnumberNodeV(i)=Bus(i).V;Nodea(i)=Bus(i).angle;VX(i)=Bus(i).V*cos(Bus(i).angle);VY(i)=Bus(i).V*sin(Bus(i).angle);dQGQL(i)=Bus(i).QG-Bus(i).QL;dPGPL(i)=Bus(i).PG-Bus(i).PL;endNodeV=NodeV'Nodea=Nodea'%VX=VX'%VY=VY'dQGQL=dQGQL'dPGPL=dPGPL'pause%for nointer=1:10maxdP=1.;maxdQ=1.;epsilon=0.000001;noiteration=0;while (maxdP>epsilon)&(maxdP>epsilon)[deltaP,deltaQ,maxdP,maxdQ]=FormdPQvector(Bus,NodeV,Nodea,dQGQL,dPGP L,B,G,busnumber);deltaP;deltaQ;maxdP;maxdQ;da=iJP*deltaP;dV=iJQ*deltaQ;Nodea=Nodea+da;NodeV=NodeV+dV;noiteration=noiteration+1;if noiteration>20breakendendfor i=1:busnumberBus(i).V=NodeV(i);NodeV(i)=NodeV(i)*Bus(i).Base_KV;Bus(i).angle=Nodea(i);Nodea(i)=Nodea(i)*180/pi;endnoiterationNodea=Nodea'NodeV=NodeV'Clear子函数%生成G、B矩阵function[G,B,X]=FormYmatrix(Bus,busnumber,Acline,aclinenumber,Trans,tansnumber) Y=zeros(busnumber);X=zeros(busnumber);for i=1:busnumberY(i,i)=Y(i,i)+Bus(i).pb*j;endfor i=1:aclinenumberf=Acline(i).fbno;t=Acline(i).tbno;Y(f,f)=Y(f,f)+Acline(i).hB*j+1/(Acline(i).R+Acline(i).X*j);Y(t,t)=Y(t,t)+Acline(i).hB*j+1/(Acline(i).R+Acline(i).X*j);Y(f,t)=Y(f,t)-1/(Acline(i).R+Acline(i).X*j);Y(t,f)=Y(t,f)-1/(Acline(i).R+Acline(i).X*j);X(f,f)=X(f,f)-1/Acline(i).X;X(t,t)=X(t,t)-1/Acline(i).X;X(f,t)=1/Acline(i).X;X(t,f)=1/Acline(i).X;endfor i=1:tansnumberf=Trans(i).fbno;t=Trans(i).tbno;Y(f,f)=Y(f,f)+1/(Trans(i).R+Trans(i).X*j);Y(t,t)=Y(t,t)+1/(Trans(i).R+Trans(i).X*j)/Trans(i).k^2;Y(f,t)=Y(f,t)-1/(Trans(i).R+Trans(i).X*j)/Trans(i).k;Y(t,f)=Y(t,f)-1/(Trans(i).R+Trans(i).X*j)/Trans(i).k;X(f,f)=X(f,f)-1/Trans(i).X;X(t,t)=X(t,t)-1/Trans(i).X;X(f,t)=1/Trans(i).X;X(t,f)=1/Trans(i).X;endG=real(Y);B=imag(Y);end%生成JP、JQ矩阵function [JP,JQ]=FormJPQmatrix(Bus,B,B2,busnumber)JP=B;JQ=B2;for i=1:busnumberif Bus(i).type==1for k=1:busnumberJQ(i,k)=0.;JQ(k,i)=0.;JP(i,k)=0.;JP(k,i)=0.;endJQ(i,i)=1.;JP(i,i)=1.;endif Bus(i).type==3for k=1:busnumberJQ(i,k)=0.;JQ(k,i)=0.;endJQ(i,i)=1.;endendend%计算偏节点PQ差量function[deltaP,deltaQ,maxdP,maxdQ]=FormdPQvector(Bus,NodeV,Nodea,dQGQL,dPGPL,B,G ,busnumber)deltaQ=dQGQL;deltaP=dPGPL;maxdP=0.;maxdQ=0.;for i=1:busnumberif Bus(i).type==1deltaQ(i)=0.;deltaP(i)=0.;endif Bus(i).type==3deltaQ(i)=0.;%y1=0;%y2=0;y3=0;for k=1:busnumberif (B(i,k)~=0|G(i,k)~=0)%y1=y1+(G(i,k)*VX(k)-B(i,k)*VY(k));%y2=y2+(G(i,k)*VY(k)+B(i,k)*VX(k));y3=y3+NodeV(k)*(G(i,k)*cos(Nodea(i)-Nodea(k))+B(i,k)*sin(Nodea(i)-Nodea(k)));endenddeltaP(i)=deltaP(i)-y3*NodeV(i);%deltaP2(i)=(deltaP2(i)-(y1*VX(i)+y2*VY(i)))/Bus(i).V;endif Bus(i).type==2%y1=0;%y2=0;y3=0;y4=0;for k=1:busnumberif (B(i,k)~=0|G(i,k)~=0)%y1=y1+(G(i,k)*VX(k)-B(i,k)*VY(k));%y2=y2+(G(i,k)*VY(k)+B(i,k)*VX(k));y3=y3+NodeV(k)*(G(i,k)*cos(Nodea(i)-Nodea(k))+B(i,k)*sin(Nodea(i)-Nodea(k))); y4=y4+NodeV(k)*(G(i,k)*sin(Nodea(i)-Nodea(k))-B(i,k)*cos(Nodea(i)-Nodea(k)));endenddeltaP(i)=deltaP(i)-y3*NodeV(i);%deltaP2(i)=(deltaP2(i)-(y1*VX(i)+y2*VY(i)))/Bus(i).V;deltaQ(i)=deltaQ(i)-y4*NodeV(i);%deltaQ2(i)=(deltaQ2(i)-(y1*VY(i)-y2*VX(i)))/Bus(i).V;endif maxdP<abs(deltaP(i));maxdP=abs(deltaP(i));endif maxdQ<abs(deltaQ(i));maxdQ=abs(deltaQ(i));enddeltaP(i)=deltaP(i)/NodeV(i);deltaQ(i)=deltaQ(i)/NodeV(i);endend3.2.1 输入数据节点数据(Nodedata.txt)bus1 1 18. 0. 0. 0. 0. 0.bus2 3 18. 1.63 0. 0. 0. 0.bus3 3 18. 0.85 0. 0. 0. 0.bus4 2 230. 0. 0. 0. 0. 0.bus5 2 230. 0. 0. 1.25 0.5 0.bus6 2 230. 0. 0. 0.9 0.3 0.bus7 2 230. 0. 0. 0. 0. 0.bus8 2 230. 0. 0. 1.0 0.35 0.bus9 2 230. 0. 0. 0. 0. 0.支路数据(Aclinedata.txt)bus4 bus5 230. 0.01 0.085 0.088bus4 bus6 230. 0.017 0.092 0.079bus5 bus7 230. 0.032 0.161 0.153bus6 bus9 230. 0.039 0.17 0.179bus7 bus8 230. 0.0085 0.072 0.0745bus8 bus9 230. 0.0119 0.1008 0.1045变压器数据(Transdata.txt)bus1 18.0 18.0 bus4 230. 230. 0.0 0.0576bus2 18.0 18.0 bus7 230. 230. 0.0 0.0625bus3 18.0 18.0 bus9 230. 230. 0.0 0.05863.2.2 输出数据Sbase_MVA =100N ={9x1 cell} [9x1 uint32] [9x1 int32] [9x1 double] [9x1 double] [9x1 double] [9x1 double] [9x1 double] [8x1 double]busnumber =9A ={6x1 cell} {6x1 cell} [6x1 double] [6x1 double] [6x1 double] [6x1 double]aclinenumber =6T ={3x1 cell} [3x1 double] [3x1 double] {3x1 cell} [3x1 double] [3x1 double] [3x1 double] [3x1 double]tansnumber =3NodeV =111111111 Nodea =0 dQGQL =-0.5000-0.3000-0.3500dPGPL =1.63000.8500-1.2500-0.9000-1.0000noiteration =9Nodea =0 9.6687 4.7711 -2.4066 -4.3499 -4.0173 3.7991 0.6215 1.9256NodeV =18 18 18 227 220 224 229 227 2313.2.3 结果分析busnumber=9,aclinenumber=6,tansnumber=3表示此次计算为9节点,6支路,3变压器的网络。