ABB机器人系统输入输出信号解释
- 格式:pdf
- 大小:163.46 KB
- 文档页数:2
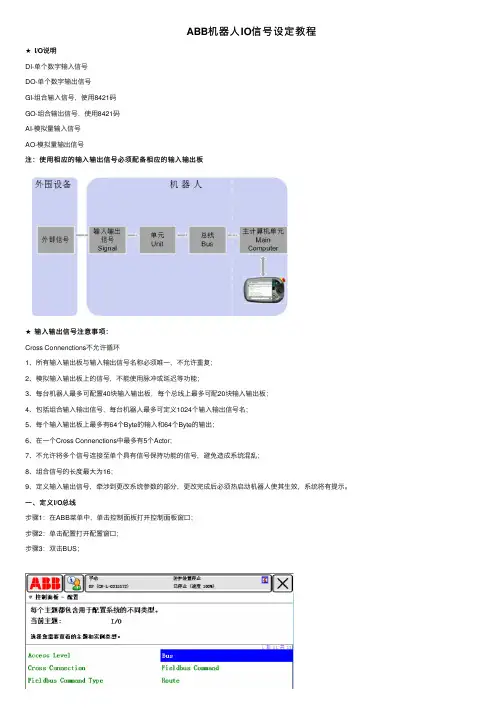
ABB机器⼈IO信号设定教程★ I/O说明DI-单个数字输⼊信号DO-单个数字输出信号GI-组合输⼊信号,使⽤8421码GO-组合输出信号,使⽤8421码AI-模拟量输⼊信号AO-模拟量输出信号注:使⽤相应的输⼊输出信号必须配备相应的输⼊输出板★输⼊输出信号注意事项:Cross Connenctions不允许循环1、所有输⼊输出板与输⼊输出信号名称必须唯⼀,不允许重复;2、模拟输⼊输出板上的信号,不能使⽤脉冲或延迟等功能;3、每台机器⼈最多可配置40块输⼊输出板,每个总线上最多可配20块输⼊输出板;4、包括组合输⼊输出信号,每台机器⼈最多可定义1024个输⼊输出信号名;5、每个输⼊输出板上最多有64个Byte的输⼊和64个Byte的输出;6、在⼀个Cross Connenctions中最多有5个Actor;7、不允许将多个信号连接⾄单个具有信号保持功能的信号,避免造成系统混乱;8、组合信号的长度最⼤为16;9、定义输⼊输出信号,牵涉到更改系统参数的部分,更改完成后必须热启动机器⼈使其⽣效,系统将有提⽰。
⼀、定义I/O总线步骤1:在ABB菜单中,单击控制⾯板打开控制⾯板窗⼝;步骤2:单击配置打开配置窗⼝;步骤3:双击BUS;步骤4:单击添加增加总线;步骤5:按住Type of Bus选择总线类型(如DeviceNet);步骤6:按住connector ID选择总线实际安装的位置(如First Board);步骤7:DeviceNet master address允许值为0-63的整数,⽤于DeviceNet⽹络中的其他设备通讯;步骤8:完成所需配置后点击确定,并在弹出的重新启动对话框中点击是完成定义。
定义完毕需要热启动,否则更改不会⽣效⼆、定义I/O单元步骤1:在ABB菜单中,单击控制⾯板窗⼝;步骤2:单击配置打开配置窗⼝;步骤3:双击Unit;步骤4:单击添加增加单元;步骤5:单击Name定义输⼊输出单元名称;在系统内名称不允许重复,第⼀位必须为字母,由字母、数字、下划线组成,最长16位字符。
输入、输出目录1、总则1.1、输入、输出窗1.2、选择输入、输出表1.3、确定最普通的输入、输出表2、改变信号数据2.1、改变数字输出数据2.2、改变模拟输出信号或者是一组输出信号的数据3、显示信息3.1、显示给出信号的信息3.2、显示设施的所有数字信号表3.3、打印输入、输出表3.4、中断的信号4、输入、输出总线回收输入/输出1、总则机器人装有数字模拟信号,在系统参数中这些数字已命名和成形,从这些信息也可以确定各种系统的动作,如:程序启动。
另外,机器人还可以通过串联通道和广播与计算机、打印机相连接。
1.1、输入/输出窗按下输入/输出键打开窗口。
该窗口显示适应信号或设施的表,它也提供信号的数据信息,见图1。
文件编辑视图命名IO 特殊输入/输出所有的信号名称数据类型4(64) Di1 1 DIDi2 0 DIGrip1 0 DOGrip2 1 DOGrip3 1 DOGrip4 1 DOProgno 13 GOWelderror 0 DO0 1窗中显示的数据每隔一秒钟自动修改1.2、选择I/O表通过选择View或者AliasIO菜单中的任何一个表,就可以决定你想要看的信息。
视图:图表名称表中的内容最重要的最重要信号数据(最有用的),该表格可以自定义适用任何机器人的安装所有的信号所有的信号数据数字输入所有数字输入信号的数据数字输出所有数字输出信号的数据模拟所有模拟输入/输出信号的数据数字组所有的数字信号组安全所有的安全信号数据装置所有的I/O装置的类型和地址I/O装置:名称一个装置的所有信号的数据和位置,详见此表:选择视图:装置选择所需装置并按下进入组合:名称在信号组中的所有信号的位置和数据详见此表:选择视图:Groups.选择所需装置并按下进入AliasIO(命名IO):图表名称表中的信息所有的信号所有的信号值数字信号输入所有的数字信号输入值数字信号输出所有的数字信号输出值逻辑信号所有的逻辑信号输入输出值成组信号所有的成组数字信号值用于在RAPID编程中显示输入/输出别名变量。

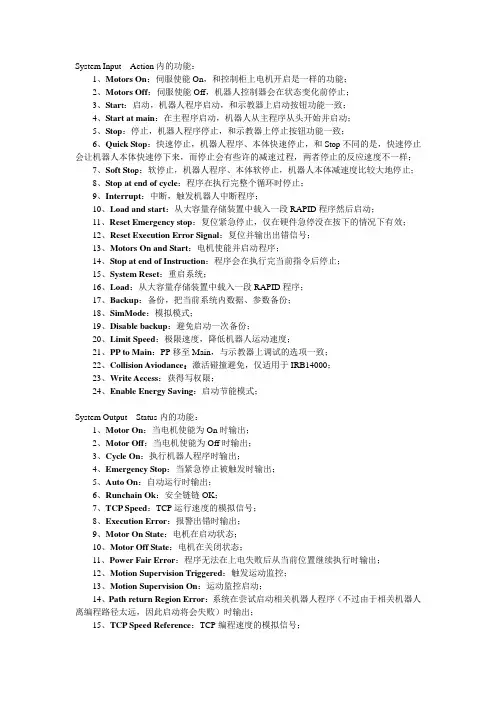
进入主窗口点击ABB主菜单, -> 选择 Control Panel定义输入输出信号进入控制面板窗口• 进入Control Panel 窗口后, 选择 Configuration定义输入输出信号• 只有完成定义输入输出板,才能定义相应 的输入输出信号。
• 点击Topics菜单,选择I/O后,在列表中点击 Signal。
定义输入输出信号• 点击Add, 增加输入输出信号。
定义输入输出信号• Name-信号名称。
按住Name进入文本编辑窗口,定义输入输 出信号名称,在系统内名称不允许重复, 第一位必须为字母,最长 16 位字符。
定义输入输出信号• Type of signal-输入输出信号的类型。
按住Type of signal, 在出现的列表中选择相 应的信号类型。
定义输入输出信号• Assigned to unit-分配输入输出板。
按住Assigned to unit,在列表中选择相应的 输入输出板。
定义输入输出信号• Unit mapping -映射物理端口。
按住该选项,进入输入窗口输入相应的映射 端口号.与输入输出板的特性相关。
定义输入输出信号• Access level 按住Access level,在列表中选择相应的 Access level 。
定义数字输入信号-DI 及GI• Filter time passive-低电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 0 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Filter time active-高电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 1 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Invert physical value -信号倒置。


系统参数配置I/0中英文含义1访问级别 2设备的信任水平 3网络设备 4以太网/ IP命令5工业网路6按某路线发送/通道7信号安全水平8交叉连接9设备网命令10 设备网内部设备11以太网/ IP设备12PROFIBUS内部任何总线设备13 信号 14系统输入 15 System Output 系统输出系统输入中action英文含义1 电机运行(开启)2开始3停止 4软停止 5中断6重置紧急停止7电机启动并开始运行8电机停止(关闭)9从主程序开始10快速停止/急停11在循环结束时停止12加载和启动 13复位执行错误信号14停止教学15系统重新启动 16备份 17禁用备份 18PP移动到主程序(即程序指针移到主程序)19写访问 20 加载 21 sim卡模式22极限转速23碰撞避免24实现节能Continuous 连续 cycle循环系统输出中action英文含义1电机运行(开启) 2循环开启 3自动开启 4TCP速度 5电机接通状态 6电源故障错误 7运动监督 8电机停止(关闭)9紧急停止10解除已ok 11执行错误12电机关闭状态13运动监督触发14路径返回区误差 16 TCP速度参考值17机械装置活动18机械装置不动作19备份进行中20 sim卡模式 21碰撞避免23模拟输入输出24任务执行25生产执行错误26备份错误27极限转速28写入存取30节能模式31温度报警32SMB电池电量低34CPU 风扇不运行35绝对精度活跃36系统输入忙系统参数配置man-machine communication(人机通信)中英文含义automtically switch jog unit:自动切换点动(慢速)装置most common I/O signal 最常见的I/O信号most common instruction-list 2最常见的说明-列表2Production Permissiom 生产许可Backup Settings备份设置most common instruction-list 1最常见的说明-列表1most common instruction-list 3最常见的说明-列表3W arning at Start警告在开始。
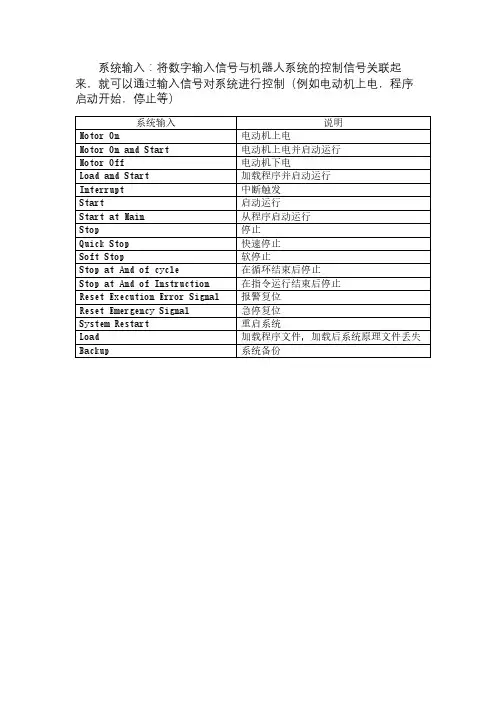
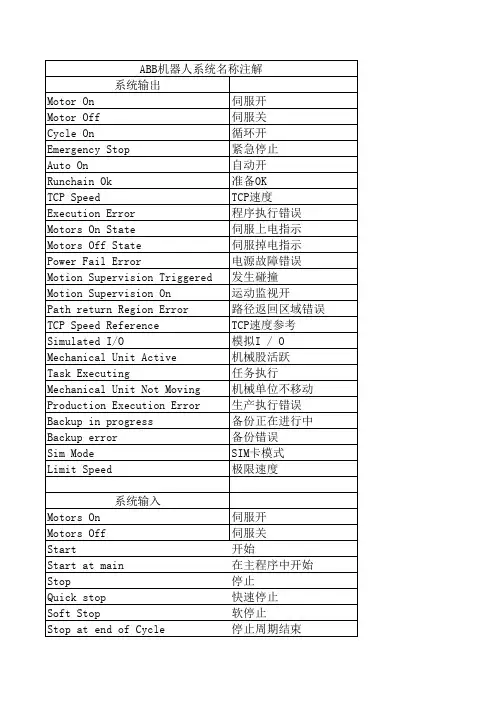
System Input Action内的功能:1、Motors On:伺服使能On,和控制柜上电机开启是一样的功能;2、Motors Off:伺服使能Off,机器人控制器会在状态变化前停止;3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Start at main:在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、Quick Stop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stop at end of cycle:程序在执行完整个循环时停止;9、Interrupt:中断,触发机器人中断程序;10、Load and start:从大容量存储装置中载入一段RAPID程序然后启动;11、Reset Emergency stop:复位紧急停止,仅在硬件急停没在按下的情况下有效;12、Reset Execution Error Signal:复位并输出出错信号;13、Motors On and Start:电机使能并启动程序;14、Stop at end of Instruction:程序会在执行完当前指令后停止;15、System Reset:重启系统;16、Load:从大容量存储装置中载入一段RAPID程序;17、Backup:备份,把当前系统内数据、参数备份;18、SimMode:模拟模式;19、Disable backup:避免启动一次备份;20、Limit Speed:极限速度,降低机器人运动速度;21、PP to Main:PP移至Main,与示教器上调试的选项一致;22、Collision Aviodance:激活碰撞避免,仅适用于IRB14000;23、Write Access:获得写权限;24、Enable Energy Saving:启动节能模式;System Output Status内的功能:1、Motor On:当电机使能为On时输出;2、Motor Off:当电机使能为Off时输出;3、Cycle On:执行机器人程序时输出;4、Emergency Stop:当紧急停止被触发时输出;5、Auto On:自动运行时输出;6、Runchain Ok:安全链链OK;7、TCP Speed:TCP运行速度的模拟信号;8、Execution Error:报警出错时输出;9、Motor On State:电机在启动状态;10、Motor Off State:电机在关闭状态;11、Power Fair Error:程序无法在上电失败后从当前位置继续执行时输出;12、Motion Supervision Triggered:触发运动监控;13、Motion Supervision On:运动监控启动;14、Path return Region Error:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCP Speed Reference:TCP编程速度的模拟信号;16、Simulated I/O:系统内至少有一个IO被仿真时输出;17、Mechanical Unit Active:机械单元启动;18、TaskExecution:执行已配置任务时输出;19、Mechanical Unit Not Moving:机械单元不在运动中;20、Production Execution Error:生产发生错误;21、Backup in progress:正在进行备份;22、Backup error:备份失败时输出;23、SimMode:仿真模式下输出;24、Limit Speed:由系统输入信号LimitSpeed触发;25、Collision Avoidance:碰撞避免激活时输出,仅限于IRB14000;26、Write Access:获得写权限;27、Energy Saving Blocked:节能模式下时输出;28、CPU Fan Not Running:中央处理器散热风扇没有启动;29、Temperature Warning:温度过高(95度);30、Absolute Accuracy Active:绝对精度激活时输出;31、SMB Bettery Charge Low:SMB电池电量过低;系统输入:系统输入的意义为当输入点为1时对应的功能动作。
ABB机器机器人组合信号的说明在ABB机器人中一共有三种信号类型,他们分别是1.数字量输入输出(DO/DI)、2.模拟量输入输出(AO/AI)、3.组合输入输出(GO/GI),这里针对第三种组合输入输出做详细介绍:1.什么是组合输入输出?解析:组输入输出就是把2个或2个以上的数字输入或者输出信号通过一个组输入输出信号去控制输出或者获取输入。
例如:ABB机器人在和PLC走IO通讯时,机器人需要通过DO1=1、DO2=0、DO3=1这样的组合去告诉PLC机器人取料完成,或者PLC通过DI1=1、DI2=1,DI3=0这样的组合来告诉机器人去取1号物料,那么用一般的程序如下:机器人输出:机器人输入;Setdo DO1,1; WaitDI DI1=1;Setdo DO2,0; WaitDI DI2=0;Setdo DO3,1; WaitDI DI3=1;这样的程序就会有两个问题:(1).整个程序很臃肿;(2).信号是顺序给的不是同时,PLC就会有可能误判。
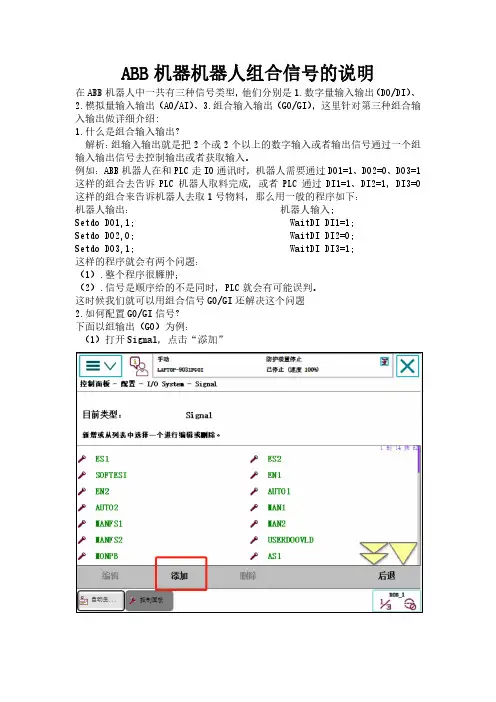
这时候我们就可以用组合信号GO/GI还解决这个问题2.如何配置GO/GI信号?下面以组输出(GO)为例:(1)打开Signal,点击“添加”(2)“Name”输入我们组输入/输出的名称,这里我以“GO1”为例(3).在Type of Signal中选择信号类型为组输出“Group Output”(4)在Assigned to Device 中选择的IO单元和需要绑定的DO信号一致。
(5)在Device Mapping填写地址填写地址原则:这里填写的地址和需要绑定的DO信号的地址一致例如地址是连续的:DO1地址是1,DO2地址是2,DO3地址是3则可以填:1-3如果DO的地址不是连续的:DO1地址是1,DO4地址是4,DO6地址是6 则可以用:1,4,6*此处地址一定要和需要绑定的DO地址一致(6)配置完点击“确定”,重启机器人,等待重启完成至此组信号已经全部配置完成,下面介绍GO的值如何计算因为GO是通过二进制的值取控制DO信号的输出,所以要输出DO1-DO3中的信号,就需要给GO赋予对应的二进制的值,按DO的地址在GO中排的位数对应的二进制数,需要第几位就拿他们相加。
ABB机器人系统输入输出功能描述输入功能:1.传感器输入:ABB机器人系统可以通过各种传感器实时获取外界环境信息。
例如,温度传感器可以用于监测环境温度,压力传感器可以用于测量液体或气体的压力。
这些传感器能够将环境信息转化为电信号,供机器人系统使用。
2.视觉输入:ABB机器人系统可以通过摄像头或激光扫描仪等设备获取视觉信息。
机器人系统可以使用这些信息来识别和跟踪目标物体,实现精准的位置和姿态控制。
3.指令输入:ABB机器人系统可以通过外部设备或控制台接收用户的指令。
用户可以通过编程或人机界面输入指令,控制机器人进行不同的工作任务。
输出功能:1.执行动作输出:ABB机器人系统可以根据输入的指令或程序执行特定的动作。
例如,机器人系统可以轻松地进行抓取、搬运、装配或焊接等操作,提高生产效率。
2.运动输出:ABB机器人系统可以通过驱动器和电机实现高精度的运动输出。
机器人系统能够根据输入的位置和速度指令,自动控制机械臂的关节运动,实现精确的定位和操作。
3.通信输出:ABB机器人系统可以通过网络或其他通信方式与外部设备进行通信。
机器人系统可以向外部设备发送各类信息,如状态报告、警报通知等,以及接收外部设备发来的信息,实现实时的数据交互。
4.数据输出:ABB机器人系统可以将处理后的数据输出到外部设备或数据库中。
这些数据可以用于后续的数据分析、决策支持和生产管理等。
1.高效性:ABB机器人系统能够快速响应输入,并实时输出相应的动作或数据。
这使得机器人系统能够高效地与外部环境和其他设备进行协调和通信,从而提高工作效率。
2.精确性:ABB机器人系统可以通过传感器和视觉技术等手段实时感知环境,实现精确的位置和动作控制。
这使机器人系统可以准确地完成各类工作任务,并保持高度一致性和重复性。
3.可扩展性:ABB机器人系统的输入输出功能可以根据具体需求进行扩展和定制。
无论是增加更多的传感器、视觉设备,还是与更多的外部设备进行通信,机器人系统都可以很方便地进行集成和升级。
输入、输出目录1、总则1.1、输入、输出窗1.2、选择输入、输出表1.3、确定最普通的输入、输出表2、改变信号数据2.1、改变数字输出数据2.2、改变模拟输出信号或者是一组输出信号的数据3、显示信息3.1、显示给出信号的信息3.2、显示设施的所有数字信号表3.3、打印输入、输出表3.4、中断的信号4、输入、输出总线回收输入/输出1、总则机器人装有数字模拟信号,在系统参数中这些数字已命名和成形,从这些信息也可以确定各种系统的动作,如:程序启动。
另外,机器人还可以通过串联通道和广播与计算机、打印机相连接。
1.1、输入/输出窗按下输入/输出键打开窗口。
该窗口显示适应信号或设施的表,它也提供信号的数据信息,见图1。
窗中显示的数据每隔一秒钟自动修改1.2、选择I/O表通过选择View或者AliasIO菜单中的任何一个表,就可以决定你想要看的信息。
视图:图表名称表中的内容最重要的最重要信号数据(最有用的),该表格可以自定义适用任何机器人的安装所有的信号所有的信号数据数字输入所有数字输入信号的数据数字输出所有数字输出信号的数据模拟所有模拟输入/输出信号的数据数字组所有的数字信号组安全所有的安全信号数据装置所有的I/O装置的类型和地址I/O装置:名称一个装置的所有信号的数据和位置,详见此表:选择视图:装置选择所需装置并按下进入组合:名称在信号组中的所有信号的位置和数据详见此表:选择视图:Groups.选择所需装置并按下进入AliasIO(命名IO):图表名称表中的信息所有的信号所有的信号值数字信号输入所有的数字信号输入值数字信号输出所有的数字信号输出值逻辑信号所有的逻辑信号输入输出值成组信号所有的成组数字信号值用于在RAPID编程中显示输入/输出别名变量。
例如:“V AR singaldo alias_do1;”“AliasIO do_1,alias_do1;”注:V AR 定义变量在模块中必须执行。
执行“指令”AliasIO do _1,alias_do1”后,按照在视图菜单中显示原始信号相同的方法通过AliasIO菜单中可以显示“the加一个信号,选择一个适应信号并按下Incl,然后用它名称左边的X来标这个信号。