第六章-联合概率数据关联算法和多假设滤波器演示教学
- 格式:pptx
- 大小:860.06 KB
- 文档页数:48
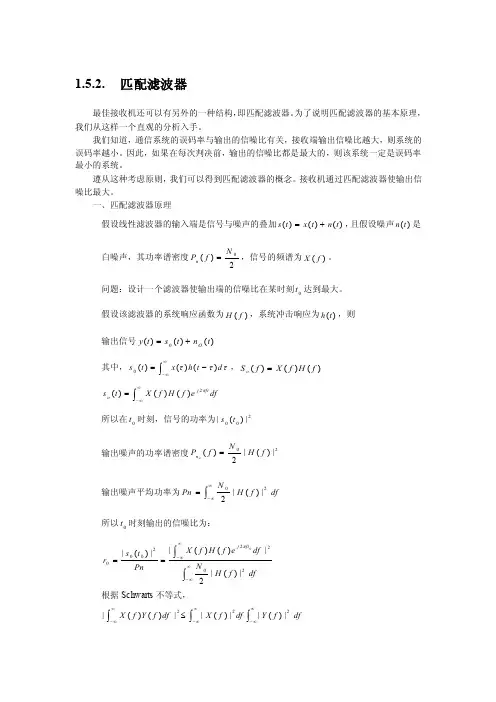
1.5.2. 匹配滤波器最佳接收机还可以有另外的一种结构,即匹配滤波器。
为了说明匹配滤波器的基本原理,我们从这样一个直观的分析入手。
我们知道,通信系统的误码率与输出的信噪比有关,接收端输出信噪比越大,则系统的误码率越小。
因此,如果在每次判决前,输出的信噪比都是最大的,则该系统一定是误码率最小的系统。
遵从这种考虑原则,我们可以得到匹配滤波器的概念。
接收机通过匹配滤波器使输出信噪比最大。
一、匹配滤波器原理假设线性滤波器的输入端是信号与噪声的叠加)()()(t n t x t s +=,且假设噪声)(t n 是白噪声,其功率谱密度2)(0N f P n =,信号的频谱为)(f X 。
问题:设计一个滤波器使输出端的信噪比在某时刻0t 达到最大。
假设该滤波器的系统响应函数为)(f H ,系统冲击响应为)(t h ,则 输出信号)()()(0t n t s t y O += 其中,⎰∞∞--=τττd t h x t s )()()(0,)()()(f H f X f S o =⎰∞∞-=df e f H f X t s ftj o π2)()()(所以在0t 时刻,信号的功率为200|)(|t s 输出噪声的功率谱密度20|)(|2)(f H N f P on =输出噪声平均功率为⎰∞∞-=df f H N Pn 20|)(|2所以0t 时刻输出的信噪比为:⎰⎰∞∞-∞∞-==dff H N df ef H f X Pnt s r ft j 20222000|)(|2|)()(||)(|0π根据Schwarts 不等式,⎰⎰⎰∞∞-∞∞-∞∞-≤df f Y dff X df f Y f X 222|)(||)(||)()(|02022|)(|N E N df f X r s =≤⎰∞∞-当02*)()(ft j e f KX f H π-=时等式成立。
因此,如果设计一个滤波器,它的系统响应函数为 02*)()(ft j ef KX f H π-=时,滤波器输出信噪比最大。
《概率论与数理统计》(46学时)课程教学大纲一、课程的基本情况课程中文名称:概率论与数理统计课程英文名称:Probability Theory and Mathematical Statistics课程编码:0702003课程类别:学科基础课课程性质:必修总学时:46 讲课学时:46 实验学时:0学分:2.5授课对象:本科相关专业前导课程:《高等数学》《线性代数》二、教学目的概率论与数理统计是研究随机现象统计规律性的数学学科,是理工科各专业的一门重要的学科基础课。
通过本课程的学习,使学生掌握概率论与数理统计的基本概念,了解它的基本理论和方法,从而使学生初步掌握处理随机现象的基本思想和方法,培养学生运用概率统计方法分析和解决实际问题的能力。
同时,也为一些后续课程的学习提供必要的基础。
三、教学基本要求第一章概率论的基本概念1.1 随机试验1.2 样本空间、随机事件1.3 频率与概率1.4 等可能概型(古典概型)1.5 条件概率1.6 独立性基本要求:1. 理解随机试验、样本空间、随机事件的概念并掌握事件的关系与运算2. 掌握概率的定义与基本性质3. 理解古典概型的概念,掌握古典概率的计算方法4. 理解条件概率的定义,熟练掌握乘法定理、全概率公式与贝叶斯公式并会灵活应用5. 理解事件独立性的概念,熟练掌握相互独立事件的性质及有关概率的计算重点与难点:1. 重点:随机事件;概率的基本性质及其应用;乘法定理、全概率公式与贝叶斯公式事件的独立性2. 难点:概率的公理化定义、条件概率概念的建立、全概率公式与贝叶斯公式的应用第二章随机变量及其分布2.1 随机变量2.2 离散型随机变量及其分布律2.3 随机变量的分布函数2.4 连续型随机变量及其概率密度2.5 随机变量的函数的分布 基本要求:1. 理解随机变量的概念;掌握离散型随机变量和连续型随机变量的描述方法2. 掌握分布律、分布函数、概率密度函数的概念及性质;掌握由概率分布计算相关事件的概率的方法3. 熟练掌握二项分布、泊松(Poisson )分布、正态分布、指数分布和均匀分布,特别是正态分布的性质并能灵活运用;熟练掌握伯努利概型概率的计算方法4. 熟练掌握一些简单的随机变量函数的概率分布的求法 重点与难点:1. 重点:随机变量、分布律、密度函数和分布函数的概念;二项分布、均匀分布的概念和性质2. 难点:二项分布的推导及应用;随机变量函数的概率分布第三章 多维随机变量及其分布 3.1 二维随机变量 3.2 边缘分布 3.3 条件分布3.4 相互独立的随机变量3.5 两个随机变量的函数的分布 基本要求:1. 正确理解二维随机变量的定义,掌握二维随机变量的联合分布律、联合分布函数、联合概率密度函数及条件分布的概念2. 熟练掌握由联合分布求事件的概率,求边缘分布及条件分布的基本方法3. 理解随机变量独立性的概念,掌握随机变量独立性的判别方法4. 了解求二维随机变量函数分布的基本思路,会求,max{,},min{,}X Y X Y X Y 的分布 重点与难点:1. 重点:由联合分布求概率,求边缘分布及条件分布的方法2. 难点:求离散型随机变量联合分布律的方法,条件密度的导出,随机变量函数的分布第四章 随机变量的数字特征 4.1 数学期望 4.2 方差4.3 协方差及相关系数 4.4 矩、协方差矩阵 基本要求:1. 掌握随机变量及随机变量函数的数学期望的计算公式,熟悉数学期望的性质并能灵活运用2. 掌握方差的概念和性质;熟悉二项分布、泊松分布、正态分布、指数分布和均匀分布的数学期望和方差;了解切比雪夫(Chebyshev )不等式3. 掌握协方差和相关系数的定义和性质,并会灵活应用4. 掌握矩、协方差矩阵的定义 重点与难点:1. 重点:数学期望、方差、相关系数与协方差的计算公式及性质2. 难点:随机变量函数的数学期望的计算,利用数学期望的性质计算数学期望,相关系数的含义第五章大数定律及中心极限定理5.1 大数定律5.2 中心极限定理基本要求:1. 掌握依概率收敛的概念及贝努利大数定律和契比雪夫大数定律2. 掌握独立同分布的中心极限定理和德莫佛-拉普拉斯(De Moivre-Laplace)极限定理3. 掌握应用中心极限定理计算有关事件的概率近似值的方法重点与难点:1. 重点:用中心极限定理计算概率的近似值的方法2. 难点:依概率收敛的概念第六章样本及抽样分布6.1 随机样本6.2 抽样分布基本要求:1. 理解总体、个体、样本容量、简单随机样本以及样本观察值的概念2. 理解统计量的概念;熟悉数理统计中最常用的统计量(如样本均值、样本方差)的计算方法及其分布χ-分布,t-分布,F-分布的定义并会查表计算3. 掌握24. 熟悉正态总体的某些常用统计量的分布并能运用这些统计量进行计算重点与难点:χ-分布, t-分布, F-分布的定义与分位点的查表;正态总体常用统计量的分布1. 重点:2χ-分布, t-分布, F-分布的定义与分位点的查表2. 难点:2第七章参数估计7.1 点估计7.3 估计量的评选标准7.4 区间估计7.5 正态总体均值与方差的区间估计7.7 单侧置信区间基本要求:1. 理解参数的点估计(矩估计、最大似然估计)的计算方法2. 掌握参数点估计的评选标准:无偏性,有效性和相合性3. 理解参数的区间估计的概念,熟悉对单个正态总体和两个正态总体的均值与方差进行区间估计的方法及步骤重点与难点:1. 重点:点估计的矩法、最大似然估计法;正态总体参数的区间估计2. 难点:最大似然估计法,两个正态总体的参数的区间估计四、课程内容与学时分配五、教材参考书教材:盛骤谢式千潘承毅《概率论与数理统计》(第三版)高等教育出版社2001. 参考书:[1] 茆诗松《概率论与数理统计教程》(第一版)高教出版社2004.[2] 王展青李寿贵《概率论与数理统计》(第一版)科学出版社2000.六、教学方式和考核方式1.教学方式:以课堂讲授为主,辅以答疑、课后作业。
2.2 多传感器信息融合与组合导航的主要目标及功能结构智能化、高精度、高可靠是未来飞行器对导航系统的要求。
基于信息融合技术的惯性/多传感器导航系统-I/MNS可满足未来飞行器对导航系统的这些要求。
以智能化为目标的I/MNS,要比传统的组合导航系统能满足更苛刻的性能要求,还能适应于更大范围的系统和环境的不确定性(各种干扰、未建模状态、系统部件失效等)。
I/MNS的智能化,可以从先验智能、反应智能、优化智能及组织与协调决策智能四个方面着手,具体表现在:(1) I/MNS的智能初始化过程包括SINS的初始对准,GPS接收机的初始信号捕获、首次定位等。
主要的功能是动态、智能地使用所有的可用信息,在最短的时间内完成各种导航传感器的初始化过程,进入系统正常的工作状态。
基于现有的各种初始化控制方法,结合当前智能控制的各种概念和方法,扩展而成为具有最优性能的智能初始化控制方法。
(2) 智能的组合滤波方法在系统和量测模型完全符合实际时,卡尔曼滤波是一种最优估计器。
但是由于我们对系统先验知识认识不足且建模状态量是有限的,滤波器在一些特殊情况下并不能适应系统和量测变化,性能不能满足要求。
实际应用中卡尔曼滤波器的不足,可以在鲁棒滤波和自适应滤波的思想与方法上,引入智能控制的方法得以解决。
(3) 智能的故障检测、隔离、系统重构(FDIR)无论是传感器一级,还是系统一级,传统的FDI常常会产生虚警和漏检,而系统重构的方法往往并没有达到最优。
因此建立一个人工智能辅助的FDIR非常重要。
(4) 参与、组织驾驶员或操纵员辅助系统(PA—Pilot’s Associate)这是I/MNS的最高层次,也是最终目标。
PA系统可以划分成五大功能部分:●系统状态监测;●任务计划;●环境估价;●战术计划;●人机接口。
智能化的I/MNS的功能结构具有一般智能系统的共性,而同时又具有自己的特点。
它遵循一般智能系统的“智能递增而精度递减”的基本原理,采用多层递阶的组织结构,层次越高智能越高而精度越低。
数据关联算法研究袁黎苗高会军袁领峰(海军南海舰队指挥所,广东湛江524001)应用科技脯要】随着传感器技术的不断发展,传感器在军事领域以及民用领域得到广泛的应用。
数据关联技术是其中的核心技术,对擞据关联算法的研究成为了计算机领域的研究重点。
研究了当前的多种教据关联算法,分析比较了几种关联算法的性能。
鹾键词】数据融合;教据关联;传感器;PD A1引言随着传感器技术的发展,多目标跟踪问题在军事和民用方面的重要性与日俱增,其涉及到的领域跨越公路交通管制、战场监视以及空中交通管制等方面,而其核,C嘟分正是数据关联问题。
近年来,人们对数据关联问题进行了大量的研究,已经有许多的数据关联算法。
本文将介绍一下数据关联算法中的几个经典的算法以及由此产生的一些新的算法,并对它们的优缺点进行说明。
2经典数据关联算法2l最邻近数据关联0、孙D∞法至今为止,许多数据关联算法都已经可以很好的解决关联问题,其中最近邻数据关联(N ear N e.ghborD at aA s s ocj at i on)算法是最简单的—种方法。
它是由S i nge r等人提出来的。
这种方法的基本思想是:首先设置关联门以限制潜在的决策数目,由关联门初步筛选所得到的回波成为候选回波。
关联门是跟踪空间中的一块子空间,中,断被跟踪目标的预测状态,其大小的设计应保证在一定概率程度E能够接收到正确回波。
最近邻法所选择的是—般是落八关联门内,并且离被跟踪目标预测位置最近的点迹。
这种方法在实际中常发生误跟和丢失目标的现象,其相关性能不甚完善。
22“全邻”最优滤波器Si nge r,S e a和H ouse w r i ght发展了一类“全邻”滤波器,这种滤波器不仅考虑了所有候选回波(空间累积信息),而且考虑了跟踪历史,即多扫描相关(时间累积信息)。
假定多余回波互不相关并且均匀分布-T-跟踪,f-J内,则任何跟踪门的体积V内多余回波的数目C x服从均值为B V的泊松分布。

1第六章 数据预处理及相容性检验6.1 前言航行器航行试验数据用于参数辨识之前,需要对试验数据进行预处理和数据相容性检验,目的在于尽可能消除含在数据中的各种噪声和系统误差,以提高辨识结果的准确度。
数据预处理包括:数据野值的识别、剔除与补正;数据加密;数据平滑与微分平滑;滤除高频噪声及以传感器位置校正等。
数据相容性检验的主要功能是将数据中的常值误差,特别是零位漂移误差辨识出来并重新建立没有常值误差的试验数据。
本章还以某型航行器的实测数据预处理为例,给出了具有实际应用意义的数据处理技术及结果。
6.2 数据处理的理论基础6.2.1 信号的分类用数学来描述待辨识系统的某一组输入和某一组输出时间函数间的关系是辨识的基础。
在选择信号的描述方法时,必须考虑信号表示的两个方面:①要表现出信号载有信息的属性;②要给出研究过程信息传递特性的方法。
按时间函数的特点来表达信息,可将信号分为连续信号和采样信号。
在许多情况下,信号的记录可以采用这两种信号中的任一种。
两种信号的记录均有各自的特点,但是利用计算机对记录的信号作处理时,往往需要采样信号,即使采用连续信号,也必须对信号作采样处理。
采样运算是线性运算,即当我们用算子ψ(.)表示这一运算时,对一切α和β,信号u(t)和y(t)均有ψαβαψβψ[()()][()][()]u t y t u t y t +=+(6-2-1)按幅度划分,信号可以分为模拟信号、量化信号和二进制信号。
二进制信号是量化信号的极限情况,量化运算是非线性运算。
因此,在处理量化信号时,这种非线性造成许多数学上的困难。
确定性信号与随机信号也是系统建模和参数辨识中常用的信号分析方式。
由于工程的实际环境,对随机信号的讨论更具有实际意义。
6.2.2 随机信号的描述为了讨论问题的方便,在此我们首先介绍随机信号的一些统计性质。
与确定性信号不一样,对随机信号询问其幅度的瞬时值是没有多少意义的,所以最有用的量是那些关于统计性质的量,如谱密度、数学期望值、方差和相关函数等。
高斯粒子 PHD 滤波的多个弱小目标 TBD 算法李翠芸;曹潇男;廖良雄;江舟【摘要】针对现有多个弱小目标检测前跟踪(track-before-detect,TBD)算法存在的跟踪精度低,算法复杂度高等问题,提出一种新的基于概率假设密度(probability hypothesis density,PHD)的 TBD 算法。
所提算法通过高斯粒子滤波对 PHD 中的各高斯项进行递归运算、进行多帧能量累积,并提取高斯项的均值为目标的状态,达到检测与跟踪多个弱小目标的目的。
算法在随机集滤波框架下完成未知数目的多个弱小目标跟踪,不仅充分利用粒子滤波的非线性估计能力,同时避免了传统算法利用模糊聚类进行目标状态提取所带来的跟踪精度低等问题。
仿真结果表明,所提算法与传统方法相比,在降低算法复杂度的同时,对多个红外弱小目标具有更加良好的实时检测和跟踪性能。
%In order to avoid the low tracking accuracy and high complexity problems in the conventional al-gorithms,a novel track-before-detect algorithm based on probability hypothesis density (PHD)filter is pro-posed for the tracking and detection of the multiple dim targets in the infrared image.With the Gaussian particle filter,the Gaussian components in PHD can be operated recursively and extracted as the states of targets.The algorithm can realize the tracking and detection of the multiple dim targets by the energy accumulation.With the theory of the random finite set,the algorithm performs the multiple dim targets tracking with unknown num-ber.It can not only make use of the nonlinear estimation ability of the particle filter but also avoid the tracking inaccuracy which is brought by the fuzzy clustering.Simulation results with the infrared images show that the proposed algorithm has thelow complexity and the better performance in the detection and tracking multiple dim targets than the conventional algorithm.【期刊名称】《系统工程与电子技术》【年(卷),期】2015(000)004【总页数】6页(P740-745)【关键词】检测前跟踪;概率假设密度;高斯粒子滤波;红外图像;多目标跟踪【作者】李翠芸;曹潇男;廖良雄;江舟【作者单位】西安电子科技大学电子工程学院,陕西西安 710071;西安电子科技大学电子工程学院,陕西西安 710071;西安电子科技大学电子工程学院,陕西西安 710071;西安电子科技大学电子工程学院,陕西西安 710071; 中国人民解放军95972 部队,甘肃酒泉 735018【正文语种】中文【中图分类】TN953近年来,基于红外探测和成像的武器系统成为各国军事领域研究的重点。