东芝最新步进电机驱动芯片TB6600HQ-HG
- 格式:pdf
- 大小:434.81 KB
- 文档页数:33
东芝低功耗有刷直流电机驱动器IC采用
兼容引脚分配HSOP8封装
作者:暂无
来源:《饮食科学》 2019年第6期
本报讯 5月30日,东芝电子元件及存储装置株式会社(“东芝”)宣布,推出其有刷直流电
机驱动器IC系列产品的最新成员“TB67H450FNG”。
新产品最大额定值为50V/3.5A,能以宽泛
的工作电压驱动电机。
此外,该产品采用兼容引脚分配的小型HSOP8表面贴装进行封装,适用性
更强。
新IC能在4.5V至44V的供电电压下驱动有刷电机。
它支持多种类型的应用,包括USB供电、电池供电和工业12V至36V供电设备。
此外,TB67H450FNG还具备3.5A电流驱动能力,可用于真
空扫地机器人、冰箱和其他家电的电机驱动,以及办公设备、ATM机等多种应用。
为了满足低功耗的需求,东芝还通过新开发的电源电路优化了TB67H450FNG的待机电流消耗,当电机在停止运行时自动进入待机模式,并关闭VCC稳压器以进行内部电路操作。
这有助于帮助OA设备和家用电器降低能耗,以及延长电池供电设备的电池使用寿命。
XC-TB6560V1步进电机驱动器使用说明淘宝地址:/非常感谢您使用XC 系列开发板!恭喜您成为兴创科技电子产品的用户!我们非常高兴您选择了本款产品。
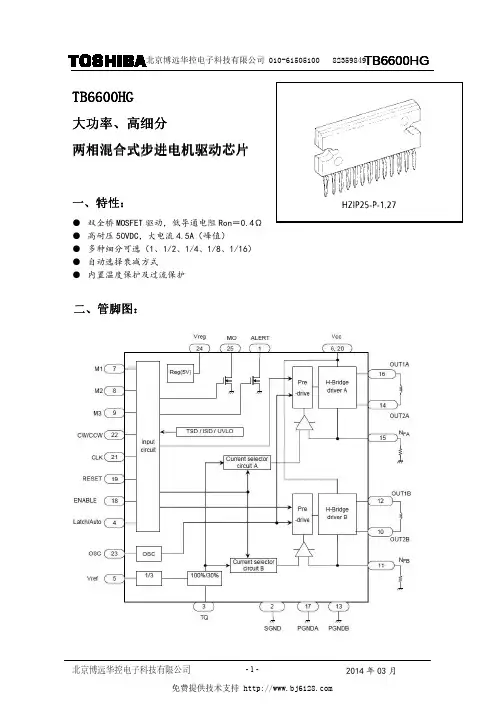
我们将为你提供最真诚最优质的服务,让您在以后的日子里尽情发挥你的创意!为了使您的产品功能得到充分发挥,我们建议在连接和操作之前,通读一遍说明书,请务必了解本产品各功能模块和设置方法后再使用,这样有助于您更好的使用本款开发板!一、简介:TB6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。
其主要特点有:内部集成双全桥MOSFET驱动;最高耐压40 V,单相输出最大电流3.5 A(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用HZIP25封装。
二:特点:a.采用PWM斩波型正弦曲线微阶控制技术b.细分:1、2、8、16细分,拨码开关设置c.直流供电,最高35V(峰值)d.最大输出驱动电流3A(峰值)e.最大脉冲频率16KHZf.接口采用高速光耦隔离g.衰减四档可调h.电机运行平稳噪声小i.外形美观,散热效果好,易于安装三、使用环境和参数:四、接线图:五、产品参数:1.使用非常方便,不需要说明书,所有使用方法都在板子上标明2.绝对使用全新原装进口日本东芝TB6560芯片3.配大型散热器,保证良好散热4.输入信号高速光耦隔离,保证不丢步5.半流模式可调,半流电流可调。
6.衰减模式可调,针对所有电机可以做到锁定时没有噪音7.体积超小,整体尺寸为:55mm*75mm,四个机械安装定位孔尺寸为:68mm*50开孔尺寸为Φ3mm额定电压:直流12V-35V最大电流:3A电流可调(Current Settings):0.75A 1.5A 2.25A 3A细分可调(Excitation Mode):1,2,8,16衰减可调(Decay Mode):0%----无衰减模式25%---慢衰减模式50%---正常模式100%--快速衰减模式-----通过对衰减模式的调节可以匹配不同的电机阻抗,从而消除步进电机锁定时的噪音以及电机运动过程中的抖动。

题目:TB6560AHQ步进电机驱动目录摘要步进电机是一种将电脉冲转化为角位移的执行机构。
驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。
首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
其次,通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。
步进电机驱动电路常用的芯片有L297和L298组合应用、3977、8435等,这些芯片一般单项驱动电流在2A左右,无法驱动更大功率电机,限制了其应用范围。
本文基于东芝公司2008年推出的步进电机驱动芯片TB6560提出了一种步进电机驱动电路的设计方案。
关键字:步进电机角位移 L297 L298 3977 8435 定位控制定速控制TB65601.概述1.1TB6560驱动芯片TB6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片,内置双全桥MOSFET驱动、温度保护及过流保护。
1.1.1在低转速运行系统中的应用优势低转速运行系统,是指时钟频率不高、以小电流驱动为主的系统,比如转速为每分钟几转到100转,用户在此种应用条件下如使用传统的驱动方案,要么因集成芯片细分太低,而使低速振动偏大;要么不得不选择细分很高的驱动器,使成本不必要的增加。
TB6560AHQ驱动芯片的优势:(1)电机振动小噪音低:因为芯片自带2、8、16细分可选,足够满足每分钟从几到近千转的应用要求。
(2)嵌入式驱动器发热少:芯片自带的散热面积足以单独支持小电流驱动的散热要求。
(3)支持各种步进电机选型:客户可选择力矩稍大的混合式或永磁式步进电机,使电机工作在允许最大转矩的百分之30至50之间,电机成本几乎不变;芯片提供多档电流设置和电流衰减模式,支持相同动力指标下各种不同参数的步进电机。
1.1.2在高转速运行系统中的应用优势高转速运行系统,是指时钟频率较高、以大电流驱动为主的系统,比如转速为每分钟接近千转,此种应用条件下如使用传统的驱动方案,要么因集成芯片细分太低,而使系统调速范围过小;要么因细分很高而过多增加了成本,还可能会出现因高频力矩下降导致的振动和噪音TB6560AHQ驱动芯片的优势:(1)电机振动小噪音低:由于TB6560AHQ芯片芯片自带16细分功能,能够满足每分钟从几到近千转的应用要求,且自动产生纯正的正弦波控制电流,与其它高集成度芯片相比,在相同高转速下力矩不但不会下降,反而有所增加;由于TB6560AHQ芯片可承受峰值40V的驱动电压、峰值3.5A的电流,为电机在大力矩、高转速下持续运行提供了的技术保障。
Copyright ○C2001北美公司美国俄亥俄州克里夫兰东71大街4455号44105‐5600纠偏事业部GUIDING SYSTEMS GROUPREV. 1.21 10/05 H6600‐LIT2手册修订历史手册修订版本软件修订版本 日期内容1.001.21 1993年4月初始版本补遗(Addendum ) 1.3 1994年4月软件修改:增加了“锁定所有按键”功能;增加了远程电压表的输入选择功能;改变了置偏限幅的最小值;改变了错边幅值的调节范围。
1.10 1.4 1994年6月因软件改变版本并结合补遗改变手册版本。
增加了H6229数字置偏仪部分的内容。
1.11 1.41996年11月少量修改。
1.12 1.42001年10月修改。
1.20 1.43 2004年8月增加了电压-频率转换板部分的内容;增加了可调节的重复搜索阈值部分的内容。
1.211.442005年10月少量修改。
注意:虽然北美公司在编写本手册时作出了最大努力以确保其精确,但并不承担因错误使用本手册或疏忽而造成的损失。
警告:任何不正确操作设备的行为,均会增加人身伤害和财产损失的危险性。
北美公司强烈建议使用者必须完全依照所有安全标准和保险商的建议,小心操作。
原英文版本号:1.21 (2005年10月)本中文译本仅供参考,如有歧义,以原英文版本为准。
GUIDING SYSTEMS GROUPREV. 1.21 10/05 H6600‐LIT1目 录第一章 系统简介 (3)1‐1 概述 ....................................................................................................................................... 3 1‐2 技术参数 . (4)第二章 控制放大器的安装与接线 (5)2‐1 控制放大器的安装 ............................................................................................................... 5 2‐2 控制放大器接线 . (5)驱动电机或伺服阀的接线 (5)探测器的接线 (6)液压锁(电磁阀“C ”)或电机制动器的接线 (6)报警触点的接线 (6)外接测量仪表的接线 (6)远程安装带材置偏仪的接线 (6)纠偏辊置中或位置反馈传感器的接线 (6)电源连接 (6)2‐3 AC 接线端子(TS302接线端子条上的A1‐A16端子) .................................................. 7 2‐4 DC 接线端子(TS301端子条上的D1‐D16端子) .......................................................... 8 2‐5 电 源 ..................................................................................................................................... 9 2‐6 伺服阀调零(仅电液伺服控制式纠偏系统适用) .. (9)第三章 初始设定 (10)3‐1 探测器的选择和标定 (10)H3109探测器设定过程举例 (10)3‐2 纠偏方向确认 (11)第四章 系统的操作和运行模式 (12)4‐1 自动控制模式 ..................................................................................................................... 12 4‐2 手动控制模式 ..................................................................................................................... 12 4‐3 纠偏辊置中控制模式 ......................................................................................................... 12 4‐4 H6600显示屏 ................................................................................................................... 13 4‐5 H6600按键说明 ............................................................................................................... 14 4‐6 H6600内部控制功能 . (15)保险丝盒 (15)开关及调节旋钮 (15)4‐7 优化系统功能的操作 (16)调节PID 控制回路 (16)调节北美伺服阀的颤幅(Dither ) (17)手动和自动控制速度的调节 (17)零点(初始纠偏基准点)的调节 (17)带材置偏仪的调节 (17)在带材一边同时安装两个探测器时的设定 (18)第五章 探测器的标定 (19)5‐1 探测器的选择和标定 (19)H3109,H3176,H3188,H3144,H3177,H3111,H3303和H3300探测器的标定 (19)H3167‐300和H3198探测器的标定 (20)H3118,H3119,H3134,H3135,H3333,H3700,H3701或其它输出为电压信号的 传感器/探测器的选定 (20)5‐2 H6600内部电压表功能的使用 (21)第六章 系统功能设置菜单说明 (22)6‐1 系统设置 (22)Calibrate Detector (标定探测器)菜单 (22)Input Configure (输入类型设置)菜单 (23)GUIDING SYSTEMS GROUPREV. 1.21 10/05 H6600‐LIT2Det 2 Sense (探测器2传感方式)菜单 (24)Guide Direction(纠偏方向)菜单 (24)Config Roll Ctr./Fdbk(辊置中或位置反馈控制设置)菜单 (24)Offset Input Select (置偏信号输入类型选择)菜单 (25)Set Offset Limit (设定置偏量限幅值)菜单 (26)Additional Feature (附加功能) 菜单 (26)Conifigure Self Seek (自搜索设定)菜单 (27)Configure Stagger (设定错边卷取)菜单 (28)Model Number & Version No.(型号和版本号)菜单 (29)Exit Configuration (退出系统设置)菜单 (29)6‐2 H6600系统设置菜单记录表 (30)第七章 H6600系统工作原理 (31)7‐1 H6600系统的组成 (31)H6600控制放大器 (31)探测器 (31)带材置偏控制仪(选购件) (32)7‐2 H6600一般工作方式 ...................................................................................................... 32 7‐3 H6600的控制原理 . (33)PID 控制回路 (34)纠偏辊架位置反馈回路 (34)纠偏辊置中控制回路(Roll Center Loop ) (35)控测器自动搜索定位控制回路(Self ‐Seek Circuit ) (35)错边卷取控制回路(Stagger Wind Circuit ) (35)第八章 故障诊断 (36)8‐1 探测器故障诊断 .............................................................................................................. 36 8‐2 H6600控制放大器的故障诊断 ...................................................................................... 38 8‐3 伺服阀和其它执行元件的故障诊断 .............................................................................. 40 8‐4 H6600控制器的I/0控制板 ............................................................................................ 42 8‐5 保险丝的更换 .................................................................................................................. 43 8‐6 继电器的更换 .................................................................................................................. 44 8‐7 H6600的缺省设定 . (45)第九章 探测器自搜索定位控制电路(选购项目) (46)9‐1 接线说明 (46)电源连接 (47)电机驱动器的接线与设置 (47)自搜索电路交流(AC)接线端子(TS402端子条上的A17‐A23号端子)功能说明 (48)自搜索电路直流(DC )接线端子(TS401号端子条上的D17‐D22端子) (48)9‐2 初始设定 (48)∙Set Self ‐Seek Gain(设定自搜索增益)子菜单 (48)∙Set Seek Polarity (设定搜索极性)子菜单 (48)∙Positioner Jog Speed (定位器点动速度)子菜单 (48)∙Re ‐seek Threshold (重复搜索阈值) (49)9‐3 操作 .................................................................................................................................. 49 9‐4 指示灯和继电器 .............................................................................................................. 49 9‐5 自搜索故障诊断 .. (50)第十章 带材错边卷取控制电路(选购项目) (51)10‐1 电气接线说明 .................................................................................................................. 51 10‐2 初始设定 ........................................................................................................................ 54 10‐3 错边卷取故障诊断 .. (55)GUIDING SYSTEMS GROUPREV. 1.21 10/05 H6600‐LIT3第一章 系统简介11 概述以微处理器为核心的H6600系列电子控制放大器适用于多种形式的纠偏场合,如带材对边纠偏、对中纠偏及其它主/从动纠偏系统等。
TB6600L两相混合式步进电机驱动器说明书一、概述TB600L型细分型两相混合式步进电机驱动器,采用直流20~50V供电,适合驱动电压24V~48V,电流小于4A外径35~57毫米的两相混合式步进电机。
此驱动器采用(2、4、8、16、32、64)细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。
高速时力矩也大大高于其它二相驱动器,定位精度高。
广泛适用于雕刻机、数控机床、包装机械等分辨率要求较高的设备上。
1、主要特点●平均电流控制,两相正弦电流驱动输出●直流20~50V供电●光电隔离信号输入/输出●有过压、欠压、过流、相间短路保护功能及报警功能●六档细分和一档半流/全流设置●八档输出相电流设置●具有脱机信号输人端子●高启动转速,高速力矩大2、电气参数二、控制信号接口2.1、控制信号定义PUL+/+5V:步进脉冲信号输入正端或正向步进脉冲信号输入正端PUL-:步进脉冲信号输入负端或正向步进脉冲信号输入负端DIR/+5V:步进方向信号输入正端或反向步进脉冲信号输入正端DIR-:步进方向信号输入负端或反向步进脉冲信号输入负端ENB/+5V:脱机使能复位信号输入正端ENB-:脱机使能复位信号输入负端脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
2.2、电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
2.3、电源电压连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:20-50V,不能超过此范围,否则会无法正常工作,甚至损坏驱动器2.4、控制信号连接上位机的控制信号可以高电平有效,可以低电平有效,也可以是差分信号。
当高有效时,把所有控制信号的负端连在一起作为信号地,低有效时,把所有控制信号的正端连在一起作为信号公共端,当差分控制信号时,驱动器脉冲的正负,方向的正负信号分开接入上位机中。
介绍二相步进电机驱动芯片THB6064AH及其应用摘要: THB6064AH是北京海华博远科技与日本东芝半导体公司合作推出的高性能步进电机驱动芯片,本文主要介绍它的原理及其应用。
其稳定的性能、便宜的价格、简洁的外围线路,为实现高性能、低成本、小型化步进电机驱动方案提供了最佳选择。
引言:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。
然而,随着市场竞争起来越激烈,对产品的成本、高度集成化、功能模块化等方面要求也越来越高。
选择专用驱动芯片的步进电机驱动方案越来越受重视。
目前市面上常见的双极型微步电机驱动芯片最高细分在16细分以内,输出峰值电流都在3.5A 以内,耐压限制在40VDC。
像A3977、TA8435、TB6560A、THB6016等,只能匹配2.5A以内、57机座以下的电机,无法驱动更大功率的步进电机。
为了打破这一局限,北京海华博远科技与日本东芝半导体公司合作推出高耐压、大电流、多细分高性能步进电机驱动芯片 THB6064AH。
一: THB6064AH 简介THB6064AH 是北京海华博远科技与日本东芝半导体公司合作推出的,是一款整合逻辑模块和功率模块于一身的高性能两相混合式步进电机驱动芯片。
配合简单的外围电路即可实现高性能、多细分、大电流的步进电机驱动。
因其驱动噪音低、震动小,性能可靠、性价比高的特点,适用于各行业的自动化设备。
其主要特点有:● 双全桥MOSFET驱动,低导通电阻Ron=0.4Ω(上桥+下桥)● 耐压高达50VDC,VM工作电压范围大● 峰值电流4.5A,输出电流连续可调● 多达8种细分可选(1/2、1/8、1/10、1/16、1/20、1/32、1/40、1/64)● 采用脉宽调制 斩波驱动方式● 自动限流、半流锁定功能● 提供四种衰减方式切换选择●内置温度保护及过流保护●低电压检测(UVLO)电路二:芯片内部方框示意图图1从上面图1方框图可以看出THB6064AH的输入输出接口非常简单,直接在CLK端输入脉冲就可以控制电机转动,改变 CW/CCW 端的电平就可以切换电机转动的方向。

康达研控科技TB6600步进电机专用驱动器使用说明TB6600步进电机专用驱动器,高性能,低价格。
!安全注意事项一、简介TB6600步进电机驱动器是一款专业的两相步进电机驱动,可实现正反转控制。
通过S1S2S33位拨码开关选择8档细分控制(1、2、4、8、16),通过S4S5S63位拨码开关选择6档电流控制(0.5A,1A,1.5A,2.0A,2.5A,3.0A, 3.5A,4.0A)。
适合驱动86,57,42,39型两相、四相混合式步进电机。
驱动器具有噪音小,震动小,运行平稳的特点。
产品特点※原装全新日本东芝驱动芯片※电流由拨码开关选择※接口采用高速光耦隔离※八种细分可调※自动半流减少发热量※大面积散热片不惧高温环境使用※抗高频干扰能力强※输入电压防反接保护※过热,过流短路保护※故障红色警示灯输入电压9-42V,推荐使用24V输入电流推荐使用开关电源功率24V/5A输出电流0.5-4.0A最大功耗72W细分1、2、4、8、16温度工作温度-10~45℃;存放温度-40℃~70℃湿度不能结露,不能有水珠气体禁止有可燃气体和导电灰尘重量0.15千克输入输出端说明◆信号输入端PUL+:脉冲信号输入正。
PUL-:脉冲信号输入负。
DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
ENA+:电机脱机控制正。
ENA-:电机脱机控制负。
◆电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
◆电源电压连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V,不能超过此范围,否则会无法正常工作,甚至损坏驱动器◆输入端接线说明输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信号DIR+,DIR-③脱机信号ENA+,ENA-。
输入信号接口有两种接法,用户可根据需要采用共阳极接法或共阴极接法。
共阳极接法:分别将PUL+,DIR+,ENA+连接到控制系统的电源上,如果此电源是+5V则可直接接入,如果此电源大于+5V,则须外部另加限流电阻R,保证给驱动器内部光藕提供8—15mA的驱动电流。
tb6600闭环控制程序设计-回复tb6600闭环控制程序设计是指通过使用TB6600步进电机驱动器来实现闭环控制系统的设计和编程。
广泛应用于自动化设备、机械加工和机器人领域。
本文将分步回答关于tb6600闭环控制程序设计的问题。
第一步:理解步进电机和tb6600闭环控制系统的基本原理步进电机是一种电动机,能够将电能转化为机械能。
通过对电流的不断变化控制转子的位置,从而实现步进电机的运动。
tb6600闭环控制系统是基于步进电机的,通过对步进电机进行闭环控制,可以精确控制电机的位置和运动。
第二步:了解tb6600步进电机驱动器的特点和功能tb6600步进电机驱动器是一种高性能的驱动器,具有以下特点和功能:1. 大电流输出:可以输出高电流,适用于大型步进电机或负载较大的应用。
2. 宽电压输入范围:可以适应不同的电源电压。
3. 完善的保护功能:具有过流、过热等保护功能,可以确保电机和驱动器的安全运行。
4. 支持多种控制方式:可以通过外部信号、直接输入脉冲等方式对电机进行控制。
5. 支持闭环控制:可与编码器或位置传感器结合,实现闭环控制和位置反馈。
第三步:了解tb6600闭环控制程序设计的基本流程tb6600闭环控制程序设计主要包括以下几个步骤:1. 传感器接口设置:根据系统需要,设置编码器或位置传感器与驱动器之间的接口。
2. 运动控制参数初始化:设置步进电机的运动参数,如速度、加速度、步距角等。
3. 位置反馈融合:将编码器或位置传感器的反馈信号与设定的运动目标进行比较,计算出误差。
4. PI控制器设计与调试:根据误差信号,设计PI控制器来控制电机的运动,并进行调试。
5. 电机驱动信号输出:根据PI控制器的输出信号,生成驱动电机的脉冲信号并输出给tb6600驱动器。
6. 状态监控与报警:设计监控系统,实时监测电机和控制系统的状态,并设置报警机制以确保工作的稳定性和安全性。
第四步:编写tb6600闭环控制程序代码在编写tb6600闭环控制程序代码之前,需要根据系统的具体需求选择合适的编程语言和开发环境。
原厂颗粒极致性能龟甲T3000 NVMe M.2固态硬盘作者:马建来源:《计算机与网络》2020年第24期传统的SATA接口固态硬盘由于带宽的问题,性能被限制在了600 MB/s以内,而最新的NVMe协议,可以让固态硬盘的速度突破3 000 MB/s,同时最新的PCIe Gen 4接口,则能让固态硬盘的性能突破7 000 MB/s,对于消费级的电脑来讲,升级NVMe M.2固态硬盘,日常使用体验将会大幅提升。
对于绝大部分的消费者而言,NVMe协议M.2接口的固态硬盘体积小巧、性能更强,是目前新装机的最优存储解决方案。
龟甲Turtle Armor是江苏芯盛智能科技有限公司推出的面向消费电子市场的全新品牌,在2020年10月举行了品牌发布会。
发布会当天,铠侠电子、长江存储、群联电子和国科微等合作厂商悉数亮相。
品牌成立之后,龟甲致力于高端消费级存储产品,并且采用原厂颗粒,品质有保证。
江苏芯盛智能科技有限公司拥有自主研发、测试以及制造等全面能力,尤其在PCIe SSD 的主控芯片、分布式存储系统方面有自己独特的见数,是目前国内拥有SSD主控芯片大规模量产经验的主要厂家之一,技术实力雄厚。
龟甲Turtle Armor的T3000型号SSD,采用了标准的2280身材,M.2接口,兼容目前绝大部分的主板,在SSD的正面是品牌标识和产品的型号以及容量,目前这款固态硬盘拥有256 GB,512 GB,1 TB,2 TB,4 TB等不同规格的容量,可以满足绝大部分消费级用户的选择。
背面是产品的SN码、防伪和各种认证。
值得一提的是龟甲特有的颗粒自查程序,用户通过扫描背部二维码,即可在微信“龟甲产品查询”小程序中识别闪存类型。
接口方面,这款龟甲T3000采用了M.2接口,支持NVMe1.3协议、PCIe3.0X4带宽,官方给出的顺序读写性能分别为3 200 MB/s和2000 MB/s,市面上的大部分主板都能够兼容,性能和兼容性都非常出色。
(For four motors)Page:1/6A Company of Wellgain Group© 2005 Data Instrumentation TechnologySTEPPER MOTOR DRIVER VID66-06G E N E R A L D E S C R I P T I O NThe quad stepping motor driver VID66-06 is a monolithic CMOS device intended to be used as an interface circuit to ease the use of the stepper motor VID29-XX. It is specifically designed for applications in the car dashboard. The chip allows the user to drive four motors as it contains four identical drivers on the same chip.The driver circuit converts a pulse train f(scx) into a current level sequence sent to the motor coils. This sequence is used to produce the micro stepping movement of the motor. Each inner driver in the chip generates 2 sequent logic pulse signals and provides shaft stepping angle resolution 1/12°.F E A T U R E S¾ Generates micro steps ¾ Glitch filters on all inputs ¾ V DD = 4.5 to 5.5V ¾ Low EMI emissionA P P L I C A T I O N S¾ Car dashboard Nautical instrumentation ¾ Nautical instrumentation ¾ Aeronautical instrumentation ¾ Appliance controls ¾ Devices for medical analysis(For four motors)Page:2/6A Company of Wellgain Group© 2005Data Instrumentation TechnologyT Y P I C A L O P E R A T I N G C O N F I G U R A T I O NP I N C O N F I G U R A T I O N(For four motors)Page:3/6A Company of Wellgain Group© 2005 Data Instrumentation TechnologyP I N D E S C R I P T I O NUnused inputs must always be tied to a defined logic voltage level .Pin NumberSOP - 28Name I/OFunction1/15 V DD V Positive supply voltage 12 V SS V Negative supply voltage28/3/14/17 f(scx) A/B/C/D I Stepping frequency; Driver A / B / C / D 27/2/13/16 CW/CCW A/B/C/D I Direction of rotation; Driver A / B / C / D 26 RESET I Reset for the four drivers 4/5/6/7 OUT 3A/4A/2A/1A O Output driver A 8/9/10/11 OUT 1D/2D/4D/3D O Output driver D 18/19/20/21 OUT 3C/4C/2C/1C O Output driver C 22/23/24/25 OUT 1B/2B/4B/3B OOutput driver BO P E R A T I N G C O N D I T I O N SParameterSymbolTestConditionsMin Typ Max UnitsOperating temperature T A ℃ Thermal impedance R ti ℃/W Supply voltageV Input voltage at any pinV V VE L E C T R I C A L C H A R A C T E R I S T I C SV DD = 4.5~5.5V, T A = -40~105°C, unless otherwise specifiedParameter Symbol Test Conditions Min Typ Max Units Typical supplycurrentI C V DD =5V,ω=200°/S,T A =25℃,R B25=280Ω 76 mAWorst case supplycurrentI CMAX V DD =5.5V,RESET=V SS ,T A =-40℃,R B-40=190Ω 200 mAQuiescent supplycurrentI CCAll inputs at V DD or V SS ,no load300 μALow level input voltageV IL V DD =4.5~5.5V V SS 1.35 VHigh level input voltageV IH V DD =4.5~5.5V 3.15V DD VInput leakage I INV IN =V SS or V DD -10 10 μA(For four motors)Page:4/6A Company of Wellgain Group© 2005Data Instrumentation TechnologyL O A D C H A R A C T E R I S T I C SParameter Symbol Test Conditions Min Typ Max UnitsCoil resistance R B25 R B-40 R B105VID29-XX,T A =25℃ VID29-XX,T A =-40℃VID29-XX,T A =105℃260190350280 300 Ω Ω ΩPhase inductanceL 25 VID29-XX,T A =25℃ 0.4HT I M I N G C H A R A C T E R I S T I C SV DD = 4.5~5.5V, T A = -40~105°C, t rise and t fall ≤ 20ns, input signal swing V SS to V DDParameter Symbol Test Conditions Min Typ Max Units Signal pulse width t w high or low450 ns Input frequency f(scx) Driver input limit 1.1 MHzMotor speed limit(=600°/s)1.1 7.2 MHz KHz Setup time tof(scx) t shigh or low100nsRESET release time to f(scx)t rr 100 nsD E L A Y T I M I N G W A V E F O R M SA B S O L U T E M A X I M U M R A T I N G SParameter Symbol Conditions Voltage V DD to V SS V DD -0.3~+6V Voltage at any pin to V DD V MAX +0.3V Voltage at any pin to V SS V MIN -0.3V Current at OUTs 1-4 I OUTMAX±35mAMax. junction temperature T j 150℃ Operating temp. range T A -40~+105℃ Storage temp. rangeT STO -65~+125℃(For four motors)Page:5/6A Company of Wellgain Group© 2005Data Instrumentation TechnologyH A N D I N G P R O C E D U R E SStresses beyond these listed maximum ratings may cause permanent damage to the device. Exposure to conditions beyond specified operating conditions may affect device reliability or cause malfunction.The device has built-in protection against high static voltages or electric fields; however, anti-static precautions must be taken as for any other CMOS component. Unless otherwise specified, proper operation can only occur when all terminal voltages are kept within the supply voltage range. Unused inputs must always be tied to a defined logic voltage level unless otherwise specified.C I R C U I T P R O T E C T I O N STo filter fast voltage transients, it is highly recommended to connect two 100nF ceramic capacitors to the power supply pins, one on either side and as close as possible to the chip.Moreover, to protect the chip against latch-up, a 5uF capacitor per motor connected should be added. Thus, for 4 motors, typically a 22uF capacitor must be used, either electrolytic or tantalum. Note this capacitor can be placed close to the voltage regulator.R E C O M M E N D E D P O W E R U PIn order to power up the circuit in a defined manner, it is recommended to keep the RESET input low while the V DD voltage is raising. After a delay of about 1ms, the RESET can be released (i.e. set high). Depending on the micro controller used, an external pull-down resistor might be required to properly set the RESET state at low during the start-up.F U N C T I O N A L D E S C R I P T I O NThe rising edge of the f(scx) input signal moves the rotor by one micro step.The input signal "CW/CCW" (clockwise / counterclockwise) controls the direction of rotation of the motor.(For four motors)Page:6/6A Company of Wellgain Group© 2005 Data Instrumentation TechnologyI N P U T G L I T C H F I L T E R & L E V E L S HI F T E RAll logic inputs of this driver are armed with a glitch filter to avoid erroneous information due to spikes and glitches on the input signal lines. All negative or positive pulses of less than 20 ns width are ignored.A minimum signal pulse width (positive or negative) of 450 ns guarantees correct function over the full temperature range.All logic inputs also feature a level shifter, which allows for operation of the circuit at a higher supply voltage (V DD ) than the circuits driving the inputs. This is in order to drive the VID motors at a higher torque level.P A C K A G E D I M E N S I O N S。
使用说明TB6600步进电机专用驱动器高性能,低成本目录简介2产品特点2电气参数2输入输出端3信号输入端3电机绕线连接3输入端接线说明3电机接线4系统接线4细分电流5细分设定5电流设定6脱机功能6常见问题6服务联系7外形尺寸图7!安全注意事项一、简介TB6600步进电机驱动器是一款专业的两相步进电机驱动,可实现正反转控制。
通过S1S2S33位拨码开关选择8档细分控制(1、2、4、8、16),通过S4S5S63位拨码开关选择6档电流控制(0.5A,1A,1.5A,2.0A,2.5A,3.0A,3.5A,4.0A)。
适合驱动86,57,42,39型两相、四相混合式步进电机。
驱动器具有噪音小,震动小,运行平稳的特点。
产品特点※原装全新日本东芝驱动芯片※电流由拨码开关选择※接口采用高速光耦隔离※八种细分可调※自动半流减少发热量※大面积散热片不惧高温环境使用※抗高频干扰能力强※输入电压防反接保护※过热,过流短路保护※故障红色警示灯电气参数输入电压9-42V,推荐使用24V输入电流推荐使用开关电源功率24V/3A输出电流0.5-4.0A最大功耗72W细分1、2、4、8、16温度工作温度-10~45℃;存放温度-40℃~70℃湿度不能结露,不能有水珠气体禁止有可燃气体和导电灰尘重量0.15千克输入输出端说明信号输入端PUL+:脉冲信号输入正。
(CP+)PUL-:脉冲信号输入负。
(CP-)DIR+:电机正、反转控制正。
DIR-:电机正、反转控制负。
EN+:电机脱机控制正。
EN-:电机脱机控制负。
◆电机绕组连接A+:连接电机绕组A+相。
A-:连接电机绕组A-相。
B+:连接电机绕组B+相。
B-:连接电机绕组B-相。
◆电源电压连接VCC:电源正端“+”GND:电源负端“-”注意:DC直流范围:9-32V。
不可以超过此范围,否则会无法正常工作甚至损坏驱动器.◆输入端接线说明输入信号共有三路,它们是:①步进脉冲信号PUL+,PUL-;②方向电平信号DIR+,DIR-③脱机信号EN+,EN-。
东芝THL600说明书
东芝机械全球战略型SCARA 机器人是基于低成本、轻重量和节能的理念开发的。
除了拥有非常有吸引力的低价格外,此环保型SCARA 机器人与同系列的其他机器人相比,拥有重量轻和节能高达50%的特点。
在性能方面,该 SCARA 机器人允许的惯性力矩高达0.2 千克平方米,重量仅为 10 千克,因此非常便于搬运,下面是操作步骤
1、先接好气管,让机械手气压表的气压在4kg-8kg之间。
2 、打开机械手电源开关,并在注塑机控制板上打开机械手功能键。
3 、注塑机开模完成后,先手动放下机械手臂,并调节好手臂下降的位置。
在调试机械手的各行程位置时,首先模开到足够宽的位置,再把机械手气缸里的气放掉,用手慢慢地托下主臂,再逐一进行调试,以免机械手下降时损坏模具及治具。
4 、按“手动”键,即可进入手动操作画面,依所须动作,先按“选择”键,再按“动作”键,依次调节好各动作的延时时间,检查安全报警装置,机械手取出异常时能否发生报警,开机之前必须调好检测,以免压模。
5、按产品的要求设定或选择所需要的程式合理进行取物,然后在注塑机自动状态下,按“全自动”键即可进入自动生产。
6、如要修改动作程式:按“停止”键和“修改”键,进入程式修改画面。
7、技术人员可依据不同的模具,输入动作程式“0-99”,确定后按“输入”键确认,再按“停止”键,然后按“全自动”键进入自动生产。
TB6612FNG模块使用说明慧净电子简单说明•电机电源接口带有反接保护电路.相对于传统的L298N效率上提高很多,体积上也大副减少,当然也就显得更加娇贵,所以我们建议有一定动手能力的朋友使用,接线的时候务必细心细心再细心,本模块全部测试OK才会售出,所以不接受任何形式的退换货,此点不能接受的朋友请慎拍.希望大家理解.TB6612的的用法TB6612的的用法:TB6612是双驱动,也就是可以驱动两个电机下面分别是控制两个电机的IO口STBY口接单片机的IO口清零电机全部停止,置1通过AIN1 AIN2,BIN1,BIN2 来控制正反转VM 接12V以内电源VCC 接5V电源GND 就不多说了啊驱动1路PWMA 接单片机的PWM口模块原理图控制逻辑表1 TB6612FNG简介• TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电机。
• TB6612FNG每通道输出最高1 A的连续驱动电流,启动峰值电流达2A/3A(连续脉冲/单脉冲);4种电机控制模式:正转/反转/制动/停止;PWM支持频率高达100 kHz;待机状态;片内低压检测电路与热停机保护电路;工作温度:-20~85℃;SSOP24小型贴片封装。
.如上图所示,TB6612FNG的主要引脚功能:AINl/AIN2、BIN1/BIN2、PWMA/PWMB为控制信号输入端;AO1/A02、B01/B02为2路电机控制输出端;STBY为正常工作/待机状态控制引脚;VM(3~13.5 V)和VCC(2.7~5.5 V)分别为电机驱动电压输入和逻辑电平输入端。
TB6612FNG是基于MOSFET的H桥集成电路,效率远高于晶体管H桥驱动器。
相比L293D每通道平均600 mA的驱动电流和1.2 A的脉冲峰值电流,它的输出负载能力提高了一倍。
相比L298N的热耗性和外围二极管续流电路,它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。