电气自动控制ppt课件
- 格式:ppt
- 大小:5.48 MB
- 文档页数:65







电气自动化控制系统电气自动化控制系统是一种应用于工业生产和设备控制的技术,通过电气信号和自动化设备的配合,实现对生产过程的自动化控制和监测。
本文将详细介绍电气自动化控制系统的定义、组成、工作原理、应用领域和优势。
一、定义电气自动化控制系统是指利用电气信号和自动化设备,对工业生产过程进行自动化控制和监测的系统。
它通过传感器感知生产过程中的各种参数,并将这些参数转化为电信号,再通过控制器对信号进行处理和判断,最终通过执行器实现对生产设备的控制。
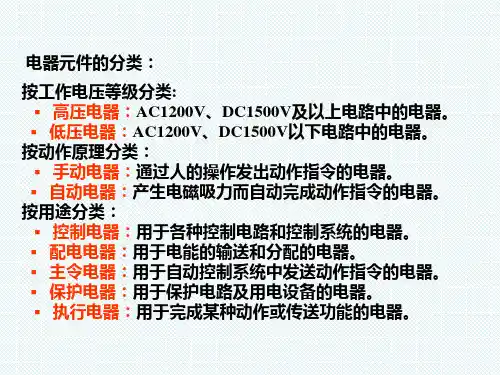
二、组成电气自动化控制系统主要由传感器、控制器、执行器和通信网络组成。
1. 传感器:用于感知生产过程中的各种参数,如温度、压力、流量等。
常见的传感器有温度传感器、压力传感器、流量传感器等。
2. 控制器:负责对传感器采集到的信号进行处理和判断,并根据预设的控制策略发出控制信号。
常见的控制器有PLC(可编程逻辑控制器)、DCS(分散控制系统)等。
3. 执行器:根据控制器发出的控制信号,对生产设备进行控制。
常见的执行器有电动阀门、电动机、气动执行器等。
4. 通信网络:用于传输传感器采集到的信号和控制器发出的控制信号。
常见的通信网络有以太网、现场总线等。
三、工作原理电气自动化控制系统的工作原理可以分为传感器采集、控制器处理和执行器控制三个步骤。
1. 传感器采集:传感器感知生产过程中的各种参数,并将其转化为电信号。
例如,温度传感器感知到的温度值会转化为电压或者电流信号。
2. 控制器处理:控制器接收传感器采集到的信号,并根据预设的控制策略进行处理和判断。
例如,当温度超过预设值时,控制器会发出控制信号。
3. 执行器控制:执行器接收控制器发出的控制信号,并对生产设备进行相应的控制。
例如,当控制器发出开启信号时,电动阀门会打开,控制流体的流动。
四、应用领域电气自动化控制系统广泛应用于各个行业的工业生产和设备控制领域。
以下是几个常见的应用领域:1. 创造业:电气自动化控制系统可以实现对生产线的自动化控制,提高生产效率和产品质量。