动力学基础(牛顿定律质点的运动微分方程)
- 格式:ppt
- 大小:62.50 KB
- 文档页数:3

第2章质点动力学2.1 牛顿运动定律一、牛顿第一定律任何物体都保持静止或匀速直线运动状态,直到其他物体所作用的力迫使它改 变这种状态为止。
二、牛顿第二定律物体所获得的加速度的大小与合外力的大小成正比,与物体的质量成反比, 方向与合外力的方向相同。
表示为f ma说明:⑵在直角坐标系中,牛顿方程可写成分量式f x ma *, f y ma y , f z ma z 。
⑶ 在圆周运动中,牛顿方程沿切向和法向的分量式f t ma t f n ma n⑷ 动量:物体质量m 与运动速度v 的乘积,用p 表示。
p mv动量是矢量,方向与速度方向相同。
由于质量是衡量,引入动量后,牛顿方程可写成dv m 一 dt 当 f 0时,r 0,dp 常量,即物体的动量大小和方向均不改变。
此结 论成为质点动量守恒定律三、 牛顿第三定律:物体间的作用力和反作用力大小相等,方向相反,且在同 一直线上。
物体同时受几个力f i ,f 2f n 的作用时,合力f 等于这些力的矢量和f n力的叠加原理d pdtf ma说明:作用力和反作用力是属于同一性质的力。
四、国际单位制量纲基本量与基本单位导出量与导出单位五、常见的力力是物体之间的相互作用。
力的基本类型:引力相互作用、电磁相互作用和核力相互作用。
按力的性质来分,常见的力可分为引力、弹性力和摩擦力。
六、牛顿运动定律的应用用牛顿运动定律解题时一般可分为以下几个步骤:隔离物体,受力分析。
建立坐标,列方程。
求解方程。
当力是变力时,用牛顿第二定律得微分方程形式求解。
例题例2-1如下图所示,在倾角为30°的光滑斜面(固定于水平面)上有两物体通过滑轮相连,已知叶3kg, m2 2kg,且滑轮和绳子的质量可忽略,试求每一物体的加速度a及绳子的张力F T(重力加速度g取9.80m • s 2)。
解分别取叶和m2为研究对象,受力分析如上图。
利用牛顿第二定律列方程:「m2g F TYL F T m1gsi n30o m1a绳子张力F T F T代入数据解方程组得加速度a 0.98m • s 2,张力F T 17.64N。
动力学方程与控制理论动力学方程和控制理论是现代科学领域中至关重要的两个分支,它们分别研究物体的运动方式和如何对其进行控制。
本文将介绍它们的基本概念、应用和未来发展方向。
一. 动力学方程动力学方程是研究物体运动的基础。
它的核心是牛顿运动定律,即物体的加速度与作用于物体上的力成正比。
通过对牛顿运动定律的研究,人们得出了质点动力学方程和刚体动力学方程等不同类型的动力学方程。
质点动力学方程描述的是质点在空间中的运动,可以用一组关于时间的二阶微分方程表达。
即:m d^2r/dt^2=F其中,m 是质量,r 是位置矢量,F 是作用在质点上的外力。
刚体动力学方程则用于描述刚体的运动,它的基本方程为角动量守恒定律和动量守恒定律。
角动量守恒定律指物体的角动量在没有外力作用时保持不变,而动量守恒定律指物体的动量在没有外力作用时保持不变。
通过这两个定律可以推导出刚体动力学方程,从而对刚体的运动方式进行分析。
动力学方程在工程和物理学等领域有广泛应用。
例如在机器人控制中,动力学方程可以用来描述机器人的运动方式和状态,进而进行运动规划和控制。
在飞行器制造中,动力学方程可以用来分析飞机的飞行状态和特性,为飞机设计提供理论支持。
二. 控制理论控制理论则研究如何将物体的运动状态控制在期望范围内。
控制技术的核心是反馈控制原理,即根据物体的运动状态进行反馈,对其进行控制并调整。
控制理论主要包括线性控制和非线性控制两种形式。
线性控制是一种处理线性系统的控制方法,它的基本思路是将系统分解成可分析的小部分,并对每个部分进行控制。
线性控制包括PID控制和状态反馈控制等形式。
PID控制是一种最为基本的线性控制方法,它通过控制输出和目标点之间的误差,对系统进行调整和控制。
状态反馈控制则是一种更为高级的线性控制方法,它通过对系统状态进行反馈来调整控制器的参数,从而对系统进行更为精确的控制。
非线性控制是一种处理非线性系统的控制方法,它的基本思路是对系统进行非线性建模,并以此设计控制器。
动力学方程1. 引言动力学方程是研究物体在运动中受到的力学作用的数学描述。
它是物理学中非常重要的概念,广泛应用于各个领域,包括经济学、工程学、生物学等。
本文将介绍动力学方程的基本概念、求解方法以及应用等方面的内容。
2. 动力学方程的定义动力学方程描述了物体在运动过程中所受到的力学作用。
一般来说,动力学方程可以分为牛顿第二定律和拉格朗日方程两种形式。
2.1 牛顿第二定律牛顿第二定律是描述质点运动的基本定律之一。
它的数学表达式为:F = ma其中,F表示物体所受的合力,m表示物体的质量,a表示物体的加速度。
根据牛顿第二定律,我们可以得到物体在受到外力作用下的运动方程。
2.2 拉格朗日方程拉格朗日方程是描述物体运动的另一种形式,它基于能量守恒的原理。
拉格朗日方程的数学表达式为:d/dt ( ∂L/∂(dq/dt) ) - ∂L/∂q = 0其中,L表示物体的拉格朗日函数,q表示广义坐标,t表示时间。
拉格朗日方程可以从运动的作用量原理推导得到,它可以描述多自由度、非洛加多力学系统的运动。
3. 动力学方程的求解方法求解动力学方程是研究物体运动的关键步骤之一。
常见的求解方法主要有解析解法和数值解法两种。
3.1 解析解法解析解法是通过数学计算的方法,求得动力学方程的精确解。
在一些简单的情况下,动力学方程可以直接求解得到解析解。
例如,简谐振动的运动方程可以通过解微分方程得到解析解。
3.2 数值解法数值解法是通过数值计算的方法,求得动力学方程的近似解。
数值解法通常采用数值求解微分方程的方法,例如欧拉法、龙格-库塔法等。
数值解法在复杂的情况下具有更好的适用性,但是精度相对较低。
4. 动力学方程的应用动力学方程广泛应用于各个领域,下面将简要介绍一些典型的应用。
4.1 经济学在经济学中,动力学方程可以用于描述经济系统的运动规律。
例如,经济增长模型可以通过动力学方程来描述经济发展的速度和方向,从而为经济政策制定提供理论依据。
牛顿第二定律微分方程全文共四篇示例,供读者参考第一篇示例:牛顿第二定律是经典力学中一个非常重要的定律,它描述了物体运动的动力学规律。
牛顿第二定律的数学表达形式为\[ F = ma \]F代表物体受到的合力,m是物体的质量,a是物体的加速度。
这个定律告诉我们,当一个物体受到一个力作用时,它会加速,而加速度的大小与受力的大小成正比,与物体的质量成反比。
在一些结构复杂的系统中,可能受到多个力的作用,牛顿第二定律的微分形式可以更好地描述这种情况。
使用微分方程描述物体的运动是一种非常重要的方法,通过微分方程可以更加精确地描述物体的加速度随时间的变化。
假设一个物体受到多个力的作用,这些力分别是\[ F_1, F_2,F_3, ..., F_n \],根据牛顿第二定律,物体的加速度可以表示为\[ a = \frac{\sum\limits_{i=1}^n F_i}{m} \]我们可以将受到的各个力拆解成不同的部分,比如重力,摩擦力等,最终得到微分方程的形式。
接下来,我们将对一个简单的例子进行分析,说明如何建立牛顿第二定律微分方程。
假设有一个质量为m的物体在水平面上运动,在受到一个恒定的外力F的作用下。
此时,物体受到的合力可以表示为\[ F_{\text{合}} = F - f \]f代表摩擦力,根据库仑摩擦定律,摩擦力大小正比于物体受力的大小,方向与物体的运动方向相反。
根据牛顿第二定律,物体的加速度可以表示为我们可以将摩擦力拆解成两部分,一部分是静摩擦力\[ f_s \],一部分是动摩擦力\[ f_k \]。
在物体刚开始运动时,摩擦力等于静摩擦力,此时静摩擦力可以表示为\[ \mu_s \]是静摩擦系数,N是物体受到的支持力。
如果外力F小于或等于静摩擦力,物体会保持静止;如果外力大于静摩擦力,物体就会开始运动,此时摩擦力等于动摩擦力。
动摩擦力可以表示为\[ \mu_k \]是动摩擦系数。
在这种情况下,物体的加速度可以表示为根据牛顿第二定律微分方程的形式,我们可以进一步将N表示为物体受到的支持力,支持力可以表示为\[ N = mg \],这里g是重力加速度。

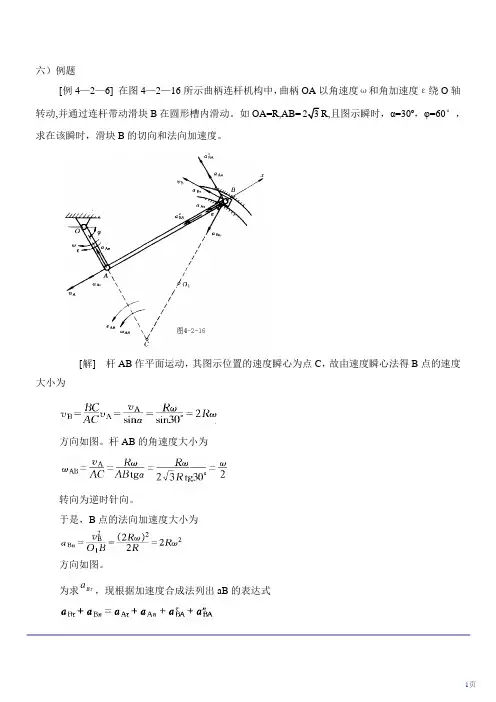
六)例题[例4—2—6] 在图4—2—16所示曲柄连杆机构中,曲柄OA以角速度ω和角加速度ε绕O轴转动,并通过连杆带动滑块B在圆形槽内滑动。
如OA=R,AB=23R,且图示瞬时,α=30º,φ=60°,求在该瞬时,滑块B的切向和法向加速度。
[解] 杆AB作平面运动,其图示位置的速度瞬心为点C,故由速度瞬心法得B点的速度大小为方向如图。
杆AB的角速度大小为转向为逆时针向。
于是,B点的法向加速度大小为方向如图。
a,现根据加速度合成法列出aB的表达式为求 B将上式投影到x轴上,得式中代入上式,并经整理后得B点的切向加速度大小为3ω)>o,则图示τB a的指向是正确的,否则反之。
若(2ε—2注意,B点绕O1点作圆周运动的角速度ωl和角加速度ε1与杆AB的ωAB和εAB是不同的。
[例4—2—7] 图示机构由曲柄连杆机构使齿条I作往复直线运动。
曲柄OA绕轴O顺时针向转动,其转速为n=60r/min,OA=10cm,AB=20cm齿轮O1、O2上下均与齿条啮合。
求当φ=90°时,齿条I的速度和加速度。
[解] 图示为一多构件组成的平面机构。
由题意知,曲柄OA以匀角速度绕O轴转动;杆O1O2和齿条I均作平动;齿轮O1、O2和连杆AB均作平面运动。
在图示位置,杆AB作瞬时平动,齿条I的运动可取与齿轮啮合的一点M代之。
在具体解算时,一般可依照运动传递的顺序,从已知构件即曲柄的运动着手,通过连接点A、B和O2的运动分析,求得齿条上M点的速度和加速度。
因曲柄OA作匀速转动,所以有由于图示位置杆AB作瞬时平动,故该瞬时杆AB的角速度B点的速度大小为方向与vA相同。
B点的加速度aB,由加速度合成法得将上式投影到x轴上,并注意到故有即方向如图4—2—17所示。
由此可算得平动杆件为O1O2上一点O2的速度、加速度为因轮O2与上下两齿条均无相对滑动,故C2为轮O2的速度瞬心,并由速度瞬心法求得M点的速度为方向如图。
第三节动力学【本节知识框架】【历年考点分布】说明:若上表中有重复题号,源于部分题目涉及多个考点。
一、牛顿定律及质点运动微分方程表4-3-1 牛顿定律及质点运动微分方程二、质点的直线振动物体在其平衡位置附近所作的周期性的往复运动称为振动。
这里仅研究单自由度系统在恢复力(或恢复力矩)、线性阻尼和谐扰力作用下的线性振动,主要包括自由振动、衰减振动和受迫振动。
1.自由振动(1)自由振动的基本要素表4-3-2 自由振动图4-3-1 单自由度系统自由振动模型(2)求固有频率的方法: ①列微分方程列出系统的运动微分方程,化为标准形式,如eq eq m x k x +=或eq eq m q k q +=即可得到ω=式中,m eq 为等效质量,表示系统的惯性;k eq为等效刚性系数,表示系统的弹性;q 为系统的广义坐标。
②平衡法在静平衡位置,刚度为k 的弹簧产生的弹性力与物块的重力mg 相等,即kδst =mg ,将其代入表4-3-1中固有圆频率的表达式,有:0ω===【典型例题】5kg 质量块振动,其自由振动规律是x =Xsinωn t ,如果振动的圆频率为30rad/s ,则此系统的刚度系数为()。
[2016年真题]A .2500N/mB .4500N/mC .180N/mD .150N/m 【答案】B【解析】自由振动的圆频率计算公式为:ω=,故刚度系数为:k =m ω2=5×900=4500N/m 。
【典型例题】图4-3-2所示系统中,当物块振动的频率比为1.27时,k 的值是( )。
[2014年真题]图4-3-2A .1×105N/mB .2×105N/mC .1×104N/mD .1.5×105N/m 【答案】A【解析】已知频率比ω/ω0=1.27,且ω=40rad/s ,0(100kg)ωm ==。
所以,k =(40/1.27)2×100=9.9×104N/m ≈1×105N/m 。