机器人避障问题的MATLAB解法探析
- 格式:doc
- 大小:13.50 KB
- 文档页数:3

v1.0 可编辑可修改机器人避障问题的解题分析摘要:本文对2012年全国大学生数学建模竞赛D题机器人避障问题进行了全面分析,对最短路的设计进行了理论分析和证明,建立了机器人避障最短路径的几何模型,对最短时间路径问题通过建立非线性规划模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等问题。
关键词:机器人避障;最短路径;Dijkstra算法;几何模型;非线性规划模型1 引言随着科学技术的进步和计算机技术的发展,机器人的应用越来越广泛,在机器人的应用中如何使机器人在其工作范围内为完成一项特定的任务寻找一条安全高效的行走路径,是人工智能领域的一个重要问题。
本文主要针对在一个场景中的各种静态障碍物,研究机器人绕过障碍物到达指定目的地的最短路径问题和最短时间问题。
本文以2012年“高教社”杯全国大学生数学建模竞赛D题“机器人避障问题”为例进行研究。
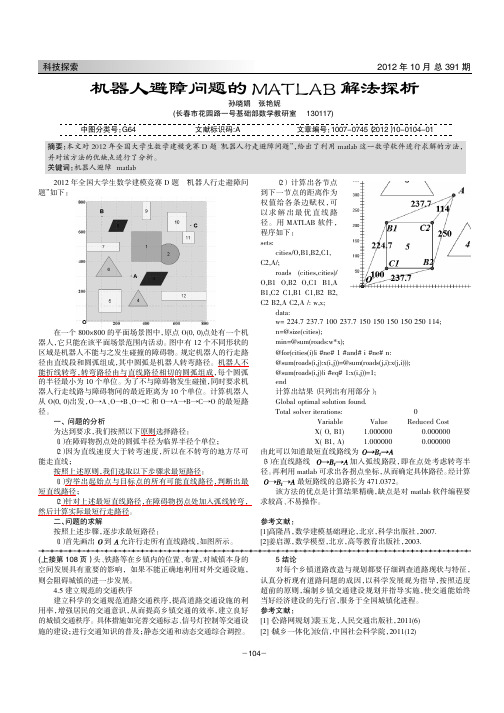
假设机器人的工作范围为800×800的平面正方形区域(如图1),其中有12个不同形状的静态障碍物,障碍物的数学描述(如表1):图1 800×800平面场景图表1在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动,机器人不能与障碍物发生碰撞,障碍物外指定一点为机器人要到达的目标点。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人转弯时,最大转弯速度为21.0100e1)(ρρ-+==v v v (ρ是转弯半径)。
如果超过该速度,机器人将发生侧翻,无法完成行走。
场景图中有4个目标点O(0, 0),A(300, 300),B(100, 700),C(700, 640),下面我们将研究机器人从O(0, 0)出发,求O→A、O→B、O→C和O→A→B→C→O的最短路径,以及机器人从O(0, 0)出发,到达A的最短时间路径问题。

机器人避障优化模型摘要“机器人避障问题”是在一个规定的区域范围内,有12个位置各异、形状不同的障碍物分布,求机器人从出发点到达目标点以及由出发点经过途中的若干目标点到达最终目标点的避障最短路径及其最短时间,其中必须考虑如圆与切线的关系等问题。
基于优化模型,对于题目实际情况进行研究和分析,对两个问题都用合适的数学思想做出了相应的解答和处理,以此建立符合题意的数学模型。
问题一,要求建立机器人从原点出发到达以区域中另一点为终点的最短路径模型。
机器人的避障路径规划主要包括环境建模、路径搜索、路径平滑等环节,针对本题的具体情况,首先对图形进行分析,并用AutoCAD 软件进行环境建模,使其在障碍物外围延伸10个单位,然后考虑了障碍物对路径安全的影响再通过蚁群算法来求它的的最短路径,由于此时最短路径中存在转弯路径,需要用人工势场法进行路径平滑处理,从而使它的最短路径在蚁群算法算出的结果情况下,可以进一步缩短其路径,从而存在机器人以区域中一点到达另一点使其避障的路径达到最短,在最终求解时,通过matlab 软件求其最优解。
问题二,仿照问题一机器人避障路径规划的基本环节所建立的一般模型,再根据题二所提出的具体问题,建立机器人从O (0,0)出发,使达到A 的最短时间路径模型。
其中已知最大速度为50=v 个单位/秒,机器人转弯时,最大转弯速度为21.0100e 1)(ρρ-+==v v v ,其中ρ是转弯半径,并有ν为增函数。
且有0νν<恒成立,则可知行走路径应尽量减少走圆弧,且可时间由走两段直线加圆弧的时间之和。
关键词: 最短路径 蚁群算法 人工势场法 机器人避障一 、问题重述图1是一个800×800的平面场景图,在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍障碍物的距离至少超过10个单位)。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。

matlab避障最短路径一、引言随着机器人技术的发展,自动化导航成为一个重要的研究领域。
在许多应用中,机器人需要通过复杂的环境中,避开障碍物并找到最短路径。
Matlab作为一种强大的数学计算工具,为我们提供了实现这一目标的丰富功能和工具。
二、建立环境模型在开始编写避障算法之前,首先需要建立机器人所在环境的模型。
可以使用Matlab的图形界面工具来实现,也可以通过编程方式来创建。
这里我们选择使用编程方式来建立环境模型。
在Matlab中,可以使用矩阵来表示环境模型。
假设我们的环境是一个网格,每个网格可以是空地、障碍物或起点/终点。
我们可以用不同的数值来表示不同的状态,例如0表示空地,1表示障碍物,2表示起点,3表示终点。
三、编写避障算法在建立环境模型之后,我们可以开始编写避障算法了。
这里我们使用A*算法来寻找最短路径。
A*算法是一种常用的启发式搜索算法,它通过估计当前节点到目标节点的代价来选择下一个节点,从而找到一条最短路径。
具体来说,A*算法通过维护一个开放列表和一个关闭列表来搜索最短路径。
初始时,将起点加入开放列表。
然后,重复以下步骤直到找到终点或开放列表为空:1. 从开放列表中选择代价最小的节点作为当前节点。
2. 如果当前节点是终点,搜索结束,返回最短路径。
3. 否则,将当前节点加入关闭列表,并计算其相邻节点的代价。
4. 对于每个相邻节点,如果它不在关闭列表中并且不是障碍物,则更新其代价,并将其加入开放列表。
四、Matlab实现在Matlab中,可以使用自定义函数来实现A*算法。
下面是一个简单的示例代码:```matlabfunction path = astar(start, goal, map)% 初始化开放列表和关闭列表openList = start;closeList = [];% 初始化起点的代价为0start.g = 0;while ~isempty(openList)% 选择开放列表中代价最小的节点作为当前节点[~, index] = min([openList.f]);current = openList(index);% 如果当前节点是终点,搜索结束if current == goalpath = reconstructPath(current);return;end% 将当前节点加入关闭列表closeList = [closeList, current];openList(index) = [];% 对当前节点的相邻节点进行处理neighbors = findNeighbors(current, map);for i = 1:length(neighbors)neighbor = neighbors(i);% 如果相邻节点在关闭列表中或是障碍物,跳过if ismember(neighbor, closeList) || map(neighbor) == 1continue;end% 计算相邻节点的代价g = current.g + 1;h = heuristic(neighbor, goal);f =g + h;% 如果相邻节点不在开放列表中,或其代价更小if ~ismember(neighbor, openList) || g < neighbor.gneighbor.g = g;neighbor.f = f;neighbor.parent = current;% 如果相邻节点不在开放列表中,加入if ~ismember(neighbor, openList)openList = [openList, neighbor];endendendend% 如果开放列表为空,搜索失败error('No path found.');endfunction path = reconstructPath(node)path = [];while ~isempty(node.parent)path = [node, path];node = node.parent;endendfunction neighbors = findNeighbors(node, map)% 根据当前节点的位置和地图大小,找到相邻节点[row, col] = size(map);neighbors = [];% 上方节点if node.row > 1neighbors = [neighbors, struct('row', node.row-1, 'col', node.col)];end% 下方节点if node.row < rowneighbors = [neighbors, struct('row', node.row+1, 'col', node.col)];end% 左方节点if node.col > 1neighbors = [neighbors, struct('row', node.row, 'col', node.col-1)];end% 右方节点if node.col < colneighbors = [neighbors, struct('row', node.row, 'col', node.col+1)];endendfunction h = heuristic(node, goal)% 使用曼哈顿距离作为启发函数h = abs(node.row-goal.row) + abs(node.col-goal.col);end```以上代码实现了A*算法,并提供了辅助函数来计算相邻节点、启发函数和重构最短路径。
2012年10月总391期科技探索头、铁路等在乡镇内的位置、布置,对城镇本身的空间发展具有重要的影响,如果不能正确地利用对外交通设施,则会阻碍城镇的进一步发展。
4.5建立规范的交通秩序建立科学的交通规范道路交通秩序,提高道路交通设施的利用率,增强居民的交通意识,从而提高乡镇交通的效率,建立良好的城镇交通秩序。
具体措施如完善交通标志、信号灯控制等交通设施的建设;进行交通知识的普及;静态交通和动态交通综合调控。
5结论对每个乡镇道路改造与规划都要仔细调查道路现状与特征,认真分析现有道路问题的成因,以科学发展观为指导,按照适度超前的原则,编制乡镇交通建设规划并指导实施,使交通能始终当好经济建设的先行官,服务于全国城镇化进程。
参考文献:[1]《公路网规划》裴玉龙,人民交通出版社,2011(6)[2]《城乡一体化》汝信,中国社会科学院,2011(12)中图分类号:G64文献标识码:A文章编号:1007-0745(2012)10-0104-01孙晓娟张艳妮(长春市花园路一号基础部数学教研室130117)机器人避障问题的MATLAB 解法探析摘要:本文对2012年全国大学生数学建模竞赛D 题“机器人行走避障问题”,给出了利用matlab 这一数学软件进行求解的方法,并对该方法的优缺点进行了分析。
关键词:机器人避障matlab 2012年全国大学生数学建模竞赛D 题“机器人行走避障问题”如下:在一个800×800的平面场景图中,原点O(0,0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的圆弧组成,每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位。
计算机器人从O(0,0)出发,O →A 、O →B 、O →C 和O →A →B →C →O 的最短路径。
机器人避障问题摘要:当今科学技术日益发达,高科技产品尤其是机器人在我们日常生活中运用的越来越广泛,它能够代替人类完成许许多多的工作,但如何能让机器人自动化的完成人类交给的任务成为设计机器人的关键。
我们做此题就是为了更好的利用机器人为我们提供方便,提高生活质量,若机器人程序设计不当不仅不会给人类带来方便,还很有可能给我们的生活带来更多的麻烦。
本题中提出了如何让机器人能够自动识别障碍物,保证机器人能够在合理区域行走,并设计出如何能让机器人自动判断最短路程于最短时间下行走路线的问题。
所以解决好本题可以为我们的生活提供帮助。
本文通过运用两点之间直线最短理论,优化问题,最短路问题,图论,以及运用matlab软件编程及作图的方法,阐述了机器人避障问题的相对优化方案的解决办法,即“两点之间直线最好,转弯半径最小”的理论,通过计算中的比较与选择把四条最短路径都求出了相对最优解,论证了转弯速度不会随着r的增加一直增大或减小,而是有一个最小极点的思想。
从而求出了r,以及最短的时间。
问题一,通过对最短路问题的分析,我们很容易分解成线圆结构来求解,然后把可能路径的最短路径采用穷举法列举出来,最终得出最短路径:O →A 最短路径为:471.0372O →B 最短路径为:838.0466O →C 最短路径为:1085.7531O→A→B→C→O最短路径为:2834.6591问题二,通过建立时间t与r的关系式,得出r在11.504时,从O到A的时间相对最短,最短时间为98.606004。
我们可以利用此篇论文解决生活中实际的问题,在计算时可以节省大量的时间,使机器人又准确又完善的完成我们给定的任务,从而进行拓展,给定区域内任何两个点,我们都可求出其最短路径和走完全程的最快时间。
从而可以让机器人帮助我们给家里打扫卫生或设计自动吸尘器等,也可使机器人在最短的时间完成工作,提高效率,延长机器人的使用寿命。
关键字:最短路问题优化问题 matlab一 问题重述 随着现代科学技术日新月异的发展,机器人越来越多的出现在日常生活中,它既可以通过运行预先编排的程序为人类服务,根据人工智能程序自动处理一些生活中问题,进而协助或者相应地取代人类的工作,可以说机器人的创新与改进正一步步影响着人类的发展。
机器人避障问题摘要本文研究了在已知区域障碍物分布的情况下,机器人从起点到目标点避障最短路径或最短时间路径的问题,路径必须是由圆弧和与之相切的直线段组成的线圆结构。
一开始先对模型预处理,将所有障碍物外扩10个单位长度,划定危险区域,得到障碍扩展图。
针对问题一,经过分析论证,无论起点到目标点间危险区域有多少,最短路径都应该是紧绕危险点的切线圆路径,且可根据需依次绕过的危险点情况划分为N条子路径(见图5.1.2)求解,圆弧段取允许最小转弯半径。
模型求解分两步走:一、将实际障碍图转化为加权可视图,利用Dijstra算法搜索出在可视图下的最短路径,主要是找到必须绕过的若干危险点。
二、根据障碍扩展图将可视图中的路径修正为实际情况下的切线圆路径,求出最终结果。
在求解过程中运用MATLAB数学软件给出路径中每段直线段或圆弧的起点和终点坐标、圆弧的圆心连接两条切线,使机器人总的行走时间最短。
而圆弧可以有圆心坐标和半径唯一确定。
由此构建机器人行走总时间的目标函数,将机器人不与障碍物碰撞作为约束条件,将该问题转变为一个非线性规划问题,借助matlab求得最优解为:T=94.3314s。
关键词:路径规划最优化模型切线圆路径 Dijstra算法非线性规划matlab求解一、问题重述图1是一个800×800的平面场景图,在原点O(0,0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰标点与障碍物的距离至少超过10个单位)。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人避障问题的解题分析摘要:本文对2012年全国大学生数学建模竞赛D题机器人避障问题进行了全面分析,对最短路的设计进行了理论分析和证明,建立了机器人避障最短路径的几何模型,对最短时间路径问题通过建立非线性规划模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等问题。
关键词:机器人避障;最短路径;Dijkstra算法;几何模型;非线性规划模型1 引言随着科学技术的进步和计算机技术的发展,机器人的应用越来越广泛,在机器人的应用中如何使机器人在其工作围为完成一项特定的任务寻找一条安全高效的行走路径,是人工智能领域的一个重要问题。
本文主要针对在一个场景中的各种静态障碍物,研究机器人绕过障碍物到达指定目的地的最短路径问题和最短时间问题。
本文以2012年“高教社”杯全国大学生数学建模竞赛D题“机器人避障问题”为例进行研究。
假设机器人的工作围为800×800的平面正方形区域(如图1),其中有12个不同形状的静态障碍物,障碍物的数学描述(如表1):图1 800×800平面场景图表1在原点O(0, 0)点处有一个机器人,它只能在该平面场景围活动,机器人不能与障碍物发生碰撞,障碍物外指定一点为机器人要到达的目标点。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人转弯时,最大转弯速度为21.0100e1)(ρρ-+==v v v (ρ是转弯半径)。
如果超过该速度,机器人将发生侧翻,无法完成行走。
场景图中有4个目标点O(0, 0),A(300, 300),B(100, 700),C(700, 640),下面我们将研究机器人从O(0, 0)出发,求O→A、O→B、O→C和O→A→B→C→O的最短路径,以及机器人从O(0, 0)出发,到达A 的最短时间路径问题。
机器人避障问题的MATLAB解法探析
作者:孙晓娟张艳妮
来源:《科技探索》2012年第10期
摘要:本文对2012年全国大学生数学建模竞赛D题“机器人行走避障问题”,给出了利用matlab这一数学软件进行求解的方法,并对该方法的优缺点进行了分析。
关键词:机器人避障 matlab
2012年全国大学生数学建模竞赛D题“机器人行走避障问题”如下:
在一个800×800的平面场景图中,原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的圆弧组成,每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位。
计算机器人从O(0,0)出发,O→A、O→B、O→C和O→A→B→C→O的最短路径。
一、问题的分析
为达到要求,我们按照以下原则选择路径:
(1)在障碍物拐点处的圆弧半径为临界半径个单位;
(2)因为直线速度大于转弯速度,所以在不转弯的地方尽可能走直线;
按照上述原则,我们选取以下步骤求最短路径:
(1)穷举出起始点与目标点的所有可能直线路径,判断出最短直线路径;
(2)针对上述最短直线路径,在障碍物拐点处加入弧线转弯,然后计算实际最短行走路径。
二、问题的求解
按照上述步骤,逐步求最短路径:
(1)首先画出O到A允许行走所有直线路线,如图所示。
(2)计算出各节点到下一节点的距离作为权值给各条边赋权,可以求解出最优直线路径。
用MATLAB软件,程序如下:
sets:
cities/O,B1,B2,C1,C2,A/;
roads(cities,cities)/O,B1 O,B2 O,C1 B1,A B1,C2 C1,B1 C1,B2 B2,C2 B2,A C2,A /: w,x;
data:
w= 224.7 237.7 100 237.7 150 150 150 150 250 114;
n=@size(cities);
min=@sum(roads:w*x);
@for(cities(i)|i #ne# 1 #and# i #ne# n:
@sum(roads(i,j):x(i,j))=@sum(roads(j,i):x(j,i)));
@sum(roads(i,j)|i #eq# 1:x(i,j))=1;
end
计算出结果(只列出有用部分):
Global optimal solution found.
Total solver iterations: 0
Variable Value Reduced Cost
X( O, B1) 1.000000 0.000000
X( B1, A) 1.000000 0.000000
由此可以知道最短直线路线为O→B1→A
(3)在直线路线O→B1→A加入弧线路段,即在点处考虑转弯半径。
再利用matlab可求出各拐点坐标,从而确定具体路径。
经计算O→B1→A 最短路线的总路长为471.0372。
该方法的优点是计算结果精确,缺点是对matlab软件编程要求较高、不易操作。
参考文献:
[1]高隆昌,数学建模基础理论,北京,科学出版社,2007.。