雷达料位计手操器调试说明
- 格式:doc
- 大小:48.23 KB
- 文档页数:2
PACTware TM应用- 7(仅供参照)一、 VEGA-DTM的窗口格对所有的 VEGA仪表的 DTM由一条菜单条和三个地区构成:231、导航地区显示被连的接仪表和翻开的DTM 的一些数据和状态。
在导航中对于参数部分,依赖被连结的仪器一个树状参数被显示。
经过选择进入树状参数,想要的参数将会在参数地区中显示出来。
能够对参数进行改正。
(在左下角有丈量值的显示)。
导航地区菜单栏的前方假如有 + 号,标记该菜单栏还有下一级菜单用鼠标左键点击 + 号,使之变成–号,就会睁开有关的下一级菜单2、参数地区在这里,能够显示所有仪器的数据并且能对传感器的参数调整做必需的改正。
在左下角有丈量值的显示。
经过选择参数部分的功能块按钮或选择导航部分的树状菜单栏调整参数页面。
.3、信息地区信息地区由经过精选的几个文件卡片部分构成。
确立传感器连结的显示部分几个功能块按钮:阻尼时间、最大最小调整、线性化、电流输出、显示等二、参数调整(修悔过的参数用保存到传感器上)1、“ Basic adjustment ”基本调整在 Sensor tag栏,能够为传感器做一个标记,如:“1#原煤仓”。
在 Units of measurement丈量单位栏,保存默认值m 。
Min./Max. adjustment( 量程调整 )" Basic adjustment–Min-Max Adjustment"(设置物位百分比的距离)VEGAPULS、VEGASON、VEGAFLEX传感器是距离丈量仪表,它们丈量的是(传感器)到产品之间的距离而其实不是直接的物位。
为了显示这个物位,丈量距离对应物位百分比的分派一定进行。
借助这一调整,物位被计算出来。
相同传感器的工作范围是从最大限制到所需的范围。
这些设置的始点是 "Sensor reference plane"(传感器基准面),比如FLEX62 传感器安装螺纹的根部。
6.3G智能雷达物位计产品说明书金湖通科仪表有限公司目录一、智能雷达物位计测量原理 (3)产品简介 (4)安装指南 (5)仪表尺寸 (9)测量条件 (11)编程调试 (11)技术参数 (13)产品选型 (14)二、导波雷达物位计测量原理 (17)产品简介 (19)安装指南 (20)调试 (23)仪表尺寸 (24)技术参数 (24)产品选型 (25)三、物位计选型参数表 (26)脉冲型雷达物位计一、测量原理发射能量很低的极短的微波脉冲通过天线系统发射并接收。
雷达波以光速运行。
运行时间可以通过电子部件被转换成物位信号。
一种特殊的时间延伸方法可以确保极短时间内稳定和精确的测量。
即使工况比较复杂的情况下,存在虚假回波,用最新的微处理技术和调试软件也可以准确的分析出物位的回波。
天线接收反射的微波脉冲并将其传输给电子线路,微处理器对此信号进行处理,识别出微脉冲在物料表面所产生的回波。
正确的回波信号识别由脉冲软件完成,精度可达到毫米级。
距离物料表面的距离D与脉冲的时间行程T成正比:D=C×T/2其中C为光速因空罐的距离E已知,则物位L为:L=E-D通过输入空罐高度E(=零点),满罐高度F(=满量程)及一些应用参数来设定,应用参数将自动使仪表适应测量环境。
对应于4-20mA输出。
应用介质:● 6.3G智能系列雷达物位计适用于对液体、浆料及颗粒料的物位进行非接触式连续测量,适用于温度、压力变化大;有惰性气体及挥发存在的场合。
●采用微波脉冲的测量方法,并可在工业频率波段范围内正常工作。
波束能量较低,可安装于各种金属、非金属容器或管道内,对人体及环境均无伤害。
二、产品简介三、安装指南安装说明●推荐距离(1):罐壁至安装短管的外壁。
●离罐壁为罐直径1/4处,最小距离为测量范围的1/8。
例如:8m液位储罐,离罐壁的最小安装距离应为1m。
●不能安装在入料口的上方(4)。
●不能安装在中心位置(3),如果安装在中央,会产生多重虚假回波,干扰回波会导致真实信号丢失。
雷达料位计说明书雷达料位计是一种用于测量储罐、槽罐等容器中物料的高度或料位的仪器。
它利用雷达技术,通过发射和接收雷达波来测量物料与仪器之间的距离,并将距离转换为料位值。
以下是雷达料位计的详细说明书:1. 产品概述:雷达料位计是一种非接触式的料位测量仪器,适用于各种液体和固体物料的测量。
它具有高精度、稳定性好、适应性广等特点,可广泛应用于化工、石油、食品、制药等行业。
2. 技术原理:雷达料位计采用微波雷达技术,通过发射微波信号并接收反射回来的信号来测量物料与仪器之间的距离。
它利用信号的往返时间和速度来计算距离,并将距离转换为料位值。
3. 产品特点:- 高精度:雷达料位计具有高精度的测量能力,可达到毫米级别的测量精度。
- 稳定性好:它具有稳定的性能,不受温度、压力等因素的影响。
- 非接触式测量:雷达料位计无需与物料接触,避免了污染和磨损的问题。
- 适应性广:它适用于各种液体和固体物料的测量,包括高温、高压、腐蚀性物料等。
4. 产品组成:雷达料位计主要由以下组件组成:- 发射器:用于发射微波信号。
- 接收器:用于接收反射回来的信号。
- 处理单元:用于计算距离并转换为料位值。
- 显示器:用于显示料位值。
5. 安装和使用:- 安装:将雷达料位计安装在容器的侧壁上,并确保与物料之间没有遮挡物。
- 设置:根据实际情况设置测量范围、单位等参数。
- 使用:开启雷达料位计,并观察显示器上的料位值。
6. 注意事项:- 避免与其他电磁设备干扰,以免影响测量结果。
- 定期检查雷达料位计的工作状态,确保其正常运行。
- 遵循操作手册中的安全操作规程,以免发生意外事故。
以上是雷达料位计的详细说明书,希望能对您有所帮助。
如有其他问题,请随时提问。
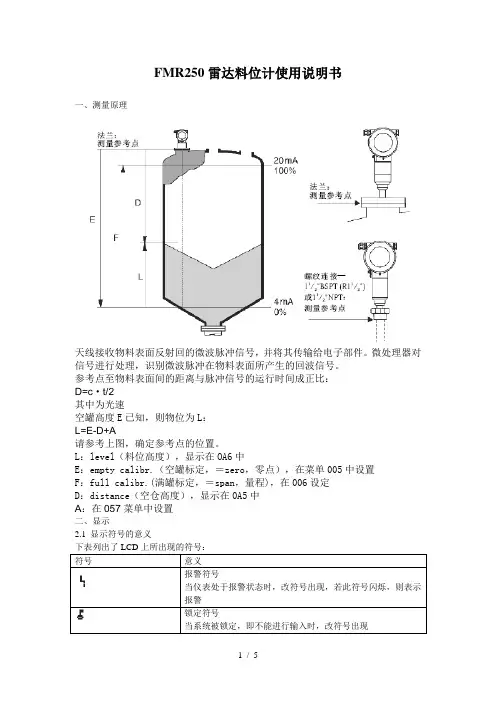
FMR250雷达料位计使用说明书一、测量原理天线接收物料表面反射回的微波脉冲信号,并将其传输给电子部件。
微处理器对信号进行处理,识别微波脉冲在物料表面所产生的回波信号。
参考点至物料表面间的距离与脉冲信号的运行时间成正比:D=c·t/2其中为光速空罐高度E已知,则物位为L:L=E-D+A请参考上图,确定参考点的位置。
L:level(料位高度),显示在OA6中E:empty calibr.(空罐标定,=zero,零点),在菜单005中设置F:full calibr.(满罐标定,=span,量程),在006设定D:distance(空仓高度),显示在0A5中A:在057菜单中设置二、显示2.1 显示符号的意义下表列出了LCD上所出现的符号:三、各菜单功能说明在一般的料位测量的使用中,主要设置以下参数:介质类型(media type 001),罐体形状(Vessel/silo 00A)空罐标定(Empty Calibr. 005),满罐标定(Full Calibr. 006),线性化(linearisation 041),客户单位(Customer unit 042),最大量程(max scale 046 此处的数值需与满罐高度一致)零点调整(offset 057 这一数值将会加到测量值上)在调试过程中需要用到的其他菜单:电流输出模式(Curr. Output mode 063 一般选择“标准”-“Standard”)查看波络线(在菜单envelope curve OE)查看信号距离。
(基本设置00)--(介质类型001:solid 固体;liquid 液体)----(罐体形状00A:unknow 未知;metal silo 金属仓;…..)---(介质特性00B:unknow 未知;DC1.6..1.9…..)---(过程条件00C:standard 标准;fast change 快速变化;…..)---(空罐标定005:输入数值)---(满罐标定006:输入满量程值)---(距离/测量值008:显示D和L)--(检查距离051 :distance=OK 距离OK;dist. toosmall 距离太小;manual 手动;...)---(抑制图范围052:手动输入,在此范围内的信号均被切除,用于干扰信号的切除)---(开始做抑制图053:off 关闭;on 打开;稍等一下,做完抑制图后自动转回off)---(距离/测量值008)---功能组选择(线性化04)--(物位/空罐040:level CU …..)--(线性化041:manual 手动;linear 线性;clear table 清空)---(客户单位042:m 米;…)---(最大量程046:输入满罐高度数值)---功能组选择(扩展标定05)--(选择050:mapping 抑制;common 普通;extended map 扩展抑制)--(回波质量056:显示回波的强弱)--(零点调整057:输入数值将会被加到测量值上)--058---058—059---功能组选择(扩展标定05)--(选择050:mapping 抑制;common 普通;extended map 扩展抑制)--(检查距离051 :distance=OK 距离OK;dist. too small 距离太小;manual 手动;...)---(抑制图范围052:手动输入,在此范围内的信号均被切除,用于干扰信号的切除)---(开始做抑制图053:off 关闭;on 打开;稍等一下,做完抑制图后自动转回off)---(距离/测量值008)---功能组选择四、故障处理1、现场表头显示0.04m,主控电脑上显示1.8m即现场显示与电脑显示对应不上,相差太远。
v e g a雷达液位计调试分解说明Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-199981.Setup 设定此处设定的是仪表的名称,容器的类型,最大最小的量程设定,阻尼时间,输出的模式按[OK] 键后进入显示如下菜单:Measurement loop name 仪表的名字Medium 介质的类型Application 容器的类型(有固液之分)Vessel type 容器底部形状Vessel height/ 容器的高度最大量程调整最小量程调整Damping 阻尼时间Current output mode 当前输出的模式Current output min./max. 当前输出的最大最小电流Lock adjustment 锁定调整1)Measurement loop name 仪表的名称按键进入显示如下Measurement loop nameSensor 可以更改的名称[OK] 键和[ ]选择需要更改的字符位置。
按[+]输入需要的名称按一下[OK] 键确认。
完成输入按【ESC】退出2) Medium 选择介质类型应用的模式按键进入显示如下MediumLiquid ▼选择介质类型介质名称[ ]确认输入的信息固体液体选择液体显示如下信息选择固体显示如下信息Solvent 溶剂 Powder/dust 粉末/灰尘化学混合物 Gramules/pellets 固体小球Water based 普通水场 Ballast/pebbles 石块、鹅卵石按一下[OK] 键和[ ]键输入需要的信息后完成按【ESC】退出)选择固体后出现如下信息Application 选择容器的类型按键进入显示如下Application选择容器的类型按[OK] 键显示如下Silo 筒仓Bunker 煤仓Bunker quick filling 物位变化快的煤仓Heap 堆料Crusher 压碎器Demonstration 演示按按[OK] 键完成选择按【ESC】退出)选择液体后出现如下信息Application 选择容器的类型按键进入显示如下Application选择容器的类型Storage tank 储存罐Storage tank with product agitation储存罐带搅拌Storage tank on ships (cargo tank)轮船上的储存罐 Stirrer vessel /Reactor反应器Dosing vessel定量给料器Stilling tube导波管Bypass旁通管Plastic vessel (measurement through the vessel 穿透测量Open water(gauge measurement)开放水池Open glume(flow measurement)开放水池Rain water overflow(weir)水槽Demonstration/test演示按[ ]键选择以上显示类型按[OK] 键完成选择按【ESC】退出4) Vessel type 选择容器底部的类型按[OK] 键进入显示如下Vessel typeVessel bottom 容器底部的类型Angular ▼可以选择的类型按键显示顶部类型Straight竖直的Comtical圆弧的Angular 有尖角的按[ ]按[OK] 键完成选择按【ESC】退出5)选择容器的高度按[OK] 键进入显示如下Vessel height/可以按照实际高度更改的数值键和[ ]选择和更改的量程位置。
西门子LR400系列雷达料位计调试步骤西门子LR400系列雷达料位计调试步骤1.正确接线后送电,仪表进行自检,自检结束后显示“××.××m ××.××dB”2.按←键一次:显示“1.Auto-Setup”后,按→键后显示语言选择,通过↑或→键选择“English”,然后按一次→键确认。
3.此时显示“m”,再按一次→键确认计量单位。
4.此时显示“Nozzle Height”,通过←、→可移动光标,↑、→键可修改参数使其示值为×××.××mm后按一次→键确认。
(安装法兰至仓顶的长度) 5.此时显示“Tank Height”,通过上述方法使其示值为“××.××m”(库高度值),然后按一次→键确认。
6.此时显示“Level URV”,通过上述方法使其示值为“××.××m”(量程值20mA),然后按一次→键确认。
7.此时显示“Level LRV”,通过上述方法使其示值为“××.××m”(零值4 mA),然后按一次→键确认。
8.此时显示“Level damping1.0s ”,通过上述方法使其示值为“××.××s”(采样周期),然后按一次→键确认。
9.此时显示“Application TypeLiquid(store) ”,通过↑、→键使其闪动部分显示为“silo2(solids)”,然后按一次→键确认。
10.此时显示与第2步相同,通过按←、→键移动光标,并通过按↑、→键修改参数使其菜单进入到“4.2.2.5 Filling Speed 200.0mm/min”通过按←、→键移动光标,并通过按↑、→键修改参数使其示值为“×××.××mm/min”(最大物料变化速率) 然后按一次→键确认。

工程代号: 编写: 审核: 批准: 日期: 页 码雷达料位计手操器调试说明 LR260 1、恢复工厂设置进入4 Service - 4.1 Device Reset - 选择Factory Defaults - 确定 2、设定参数进入2 Setup - 2.2 Input - 2.2.1 Sensor Calibration - 2.2.1.4 Sensor Units -选择M (单位是米) 2.2.1.5 Operation - 选择Level (物位测量) 2.2.1.6 Low Calibration Pt -输入16 (满量程16米) 2.2.1.7 High Calibration Pt -输入0(高位点)2.2.7 Rate - 2.2.7.1 Response Rate -fast (选择反应速度) 标红处根据实际情况设定。
3、 回波选择(如以上步骤完成后仪表正常工作,不需调整此项) 2.2.4. Echo Processing - 2.2.4.1 Echo Select -供选择形式12种,第三项 L ,第八项 BLF ,第十二项 TF 是常用的形式,根据实际情况调整。
如果使用延长导波管,建议使用第三项L 。
4、 阻尼时间设定2.2.4.3.2 Damping Filter ,工厂默认为0,一般可设定5-20S 。
可以抑制测量波动。
5、自动抑制范围工程代号: 编写: 审核: 批准: 日期: 页 码2.2.5.3 Auto Suppression Range 工厂默认为1.00M ,可以根据实际情况设置范围是0-30M 。
一般设置为法兰下端面至喇叭天线的长度加20-30CM 。
2.2.5.2 Auto False Echo Suppression 虚假波抑制学习, 选择Learn ,等待变为On ,设置成功。
6、波形图3.1 Echo Profile ,观察波峰位置。
一PLICSCOM显示调试模块设置1.1概述功能/设置显示调试模块PLICSCOM用于测量显示、调整和测试,可安装于下列封装外壳和仪器中:�plics®系列传感器的所有单室壳体和双室壳体;�外置的显示调试单元VEGADIS61;从PLICSCOM的硬件版本…-01开始及其传感器,可以通过调试菜单设置背光显示。
硬件的版本号标示在PLICSCOM的标签上或传感器的电子部件中。
提示:此功能是用于带有安全许可的仪表,如:StEx、WHG或船用许可,以及FM、CSA等一些即将实施的国家专用许可。
备注:您可以在显示调试模块PLICSCOM的操作指引手册中获得详细的资料。
1.2显示调试模块的安装装卸显示调试模块显示调试模块可随时装卸,装卸可带电操作,无需关闭供电电源。
安装步骤如下:1、旋开外壳面盖;2、把显示调试模块放入电子面板上(你可选择四种不同的方位,每个方位相差90°)3、压紧显示调试模块并顺时针转动,直至模块卡紧到位;4、装回带观察视窗的外壳面盖并旋紧。
拆卸方法则是上述步骤的反操作。
显示调试模块直接由传感器供电,无需连接额外的电源。
图26显示调试模块安装示意图备注:如果您是在原有的VEGAPULS63上增加显示调试模块用于连续测量显示,将需要配置一个加高的带观察视窗的面盖。
1.3系统调试图27显示和调试部件1、液晶显示屏2、菜单编号显示3、调试按键按键功能�[OK]按键:−返回到菜单首项−确认所选菜单−编辑参数−保存设置�[►]按键选择:−菜单选择−列出选项−位置编辑�[+]按键:−改变参数值�[ESC]按键:−中断输入−返回上一层菜单系统调试传感器通过显示调试模块的四个按键作调整,液晶屏显示各个菜单选项,各个按键的功能如上所述。
在停止按键10分钟后,模块将会自动回复到显示测量值状态。
任何没有以[OK]键确认的设置将不会保存。
1.4设置的步骤HART-Multidrop地址设置在HART-Multidrop模式(一个输入设置多个传感器),必须首先设置地址,然后才能作参数调整。
4. Additional adjustments 附加校准Instrument units 给距离和温度赋单位False signal suppression 虚假参数处理Linearization curve 线性化曲线PIN 密码Date/Time 日期和时间Reset 复位HART operation mode HART工作模式Copy instr.settings 拷贝传感器数据1)Instrument units 给距离和温度赋单位键进入显示如下对距离赋予单位可以选择m ft对温度赋予单位可以选择℃℉K[OK] 键和[ ►]键配合选择单位ESC】退出2)虚假参数处理是否更改虚假参数按键和[ ►]选择3)线性化曲线显示可以选择的线性化线性化卧罐球罐水槽文氏管v型槽自定义[ ►]确认输入的信息4)密码键进入显示如下可以更改的密码是否更改[OK] 键和[ ►]选择需要更改的字符位置。
按一下[OK] ESC】退出5)日期和时间键和[ ►]选择需要的格式通过按[OK] 键和[ ►]和[+]完成时间的输入按【ESC】退出6)复位是否做复位工厂设定基本设定设定虚假参数峰值电子部件温度[ ►]键和[OK] 键搭配就可以进行复位按【ESC】退出7)HART工作模式Standard 标准的(输出4…20mA时使用)Multidrop ( 多支路工作模式为Multidrop时使用)键和[ ►]选择需要的格式8)拷贝传感器数据从传感器拷贝到plicscom.新plicscom只有这一项从plicscom拷贝到传感器[ ►]键和[OK] 键搭配就可以确认按【ESC】退出。
6.3G智能雷达物位计产品说明书金湖通科仪表有限公司目录一、智能雷达物位计测量原理 (3)产品简介 (4)安装指南 (5)仪表尺寸 (9)测量条件 (11)编程调试 (11)技术参数 (13)产品选型 (14)二、导波雷达物位计测量原理 (17)产品简介 (19)安装指南 (20)调试 (23)仪表尺寸 (24)技术参数 (24)产品选型 (25)三、物位计选型参数表 (26)脉冲型雷达物位计一、测量原理发射能量很低的极短的微波脉冲通过天线系统发射并接收。
雷达波以光速运行。
运行时间可以通过电子部件被转换成物位信号。
一种特殊的时间延伸方法可以确保极短时间内稳定和精确的测量。
即使工况比较复杂的情况下,存在虚假回波,用最新的微处理技术和调试软件也可以准确的分析出物位的回波。
天线接收反射的微波脉冲并将其传输给电子线路,微处理器对此信号进行处理,识别出微脉冲在物料表面所产生的回波。
正确的回波信号识别由脉冲软件完成,精度可达到毫米级。
距离物料表面的距离D与脉冲的时间行程T成正比:D=C×T/2其中C为光速因空罐的距离E已知,则物位L为:L=E-D通过输入空罐高度E(=零点),满罐高度F(=满量程)及一些应用参数来设定,应用参数将自动使仪表适应测量环境。
对应于4-20mA输出。
应用介质:● 6.3G智能系列雷达物位计适用于对液体、浆料及颗粒料的物位进行非接触式连续测量,适用于温度、压力变化大;有惰性气体及挥发存在的场合。
●采用微波脉冲的测量方法,并可在工业频率波段范围内正常工作。
波束能量较低,可安装于各种金属、非金属容器或管道内,对人体及环境均无伤害。
二、产品简介三、安装指南安装说明●推荐距离(1):罐壁至安装短管的外壁。
●离罐壁为罐直径1/4处,最小距离为测量范围的1/8。
例如:8m液位储罐,离罐壁的最小安装距离应为1m。
●不能安装在入料口的上方(4)。
●不能安装在中心位置(3),如果安装在中央,会产生多重虚假回波,干扰回波会导致真实信号丢失。
PACT ware TM应用-7使用 PACT ware TM VEGA DTM调试FLEX60 PULS60 SON60(仅供参考)一、VEGA-DTM的窗口格对所有的VEGA仪表的 DTM由一条菜单条和三个区域组成:2131、导航区域显示被连的接仪表和打开的 DTM 的一些数据和状态。
在导航中对于参数部分,依靠被连接的仪器一个树状参数被显示。
通过选择进入树状参数,想要的参数将会在参数区域中显示出来。
可以对参数进行修改。
(在左下角有测量值的显示)。
导航区域菜单栏的前面如果有 + 号,标志该菜单栏还有下一级菜单用鼠标左键点击 + 号,使之变为–号,就会展开相关的下一级菜单2、参数区域在这里,可以显示所有仪器的数据并且能对传感器的参数调整做必要的修改。
在左下角有测量值的显示。
通过选择参数部分的功能块按钮或选择导航部分的树状菜单栏调整参数页面。
.几个功能块按钮:阻尼时间、最大最小调整、线性化、电流输出、显示等3、信息区域信息区域由经过挑选的几个文件卡片部分组成。
确定传感器连接的显示部分二、参数调整(修改过的参数用保存到传感器上)1、“Basic adjustment”基本调整在Sensor tag栏,可以为传感器做一个标记,如:“1#原煤仓”。
在Units of measurement测量单位栏,保留默认值 m 。
Min./Max. adjustment (量程调整)" Basic adjustment – Min-Max Adjustment" (设置物位百分比的距离)VEGAPULS、VEGASON、VEGAFLEX 传感器是距离测量仪表,它们测量的是(传感器)到产品之间的距离而并不是直接的物位。
为了显示这个物位,测量距离对应物位百分比的分配必须进行。
借助这一调整,物位被计算出来。
同样传感器的工作范围是从最大限制到所需的范围。
这些设置的始点是"Sensor reference plane"(传感器基准面),例如FLEX62传感器安装螺纹的根部。
菜单系统:液晶显示,显示:-测量值-菜单栏-参数【ESC】:-中断输入-返回上层菜单【+】:改变参数值【►】选择:-菜单.菜单栏进入菜单【OK】:-确定菜单-选择参数-编辑参数-保存参数调整系统传感器的调整通过调整和显示模块PLICSCOM 的四个按键进行。
LC 显示指示个别的菜单栏。
功能显示在图表的上方。
最后按键约10 分钟之后,自动触发恢复到测量值显示。
任何数值不用[OK] 确认将不保存。
PLICSCOM 平时显示测量值主菜单由五部分组成:1.Setup 设置2.Display 显示3.Diagnostics 诊断4.Additional adjustments 附加校准5.Info 信息用[ESC] [ ►] [OK] 键在菜单字段之间移动注:PLICSCOM 的功能菜单由相应的传感器和传感器各自的软件版本决定。
各自的菜单栏视当时连接的仪表和信号输出类型而定。
当选中后显示黑色分菜单1. setup包括以下内容Measurement loop name 仪表的名字Medium 介质的类型Application 容器的类型Vessel type 容器底部形状Vessel height/Me.range 容器的高度Max.adjustment 最大量程调整Min.adjustment 最小量程调整Damping 阻尼时间Current output mode 当前输出的模式Current output min./max. 当前输出的最大最小电流Lock adjustment 锁定调整2. Display 包括以下内容Language 显示模块显示的语言Displayed value 显示的测量值Backlight 背光的选择3. Diagnostics 包括以下内容Device status 仪表状态Peak values (distance) 峰值Electronics temperature 温度Meas.relibility 可靠性Simulation 模拟测量Curve indication 曲线显示4. Additional adjustments 包括以下内容Instrument units 给距离和温度赋单位False signal suppression 虚假参数处理Linearization curve 线性化曲线PIN 密码Date/Time 日期和时间Reset 复位HART operation mode HART工作模式Copy instr.settings 拷贝传感器数据5、Info 包括以下内容Device name 仪表名称Instrument version软件信息Date of manufacture 制作日期Inatrument features 传感器详细资料。
工程代号: 编写: 审核: 批准: 日期: 页 码
雷达料位计手操器调试说明 LR260 1、
恢复工厂设置
进入4 Service - 4.1 Device Reset - 选择Factory Defaults - 确定 2、
设定参数
进入2 Setup - 2.2 Input - 2.2.1 Sensor Calibration - 2.2.1.4 Sensor Units -选择M (单位是米) 2.2.1.5 Operation - 选择Level (物位测量) 2.2.1.6 Low Calibration Pt -输入16 (满量程16米) 2.2.1.7 High Calibration Pt -输入0(高位点)
2.2.7 Rate - 2.2.7.1 Response Rate -fast (选择反应速度) 标红处根据实际情况设定。
3、 回波选择(如以上步骤完成后仪表正常工作,不需调整此项) 2.2.4. Echo Processing - 2.2.4.1 Echo Select -
供选择形式12种,第三项 L ,第八项 BLF ,第十二项 TF 是常用的形式,根据实际情况调整。
如果使用延长导波管,建议使用第三项L 。
4、 阻尼时间设定
2.2.4.
3.2 Damping Filter ,工厂默认为0,一般可设定5-20S 。
可以抑制测量波动。
5、自动抑制范围
工程代号: 编写: 审核: 批准: 日期: 页 码
2.2.5.3 Auto Suppression Range 工厂默认为1.00M ,可以根据实际情况设置范围是0-30M 。
一般设置为法兰下端面至喇叭天线的长度加20-30CM 。
2.2.5.2 Auto False Echo Suppression 虚假波抑制学习, 选择Learn ,等待变为On ,设置成功。
6、波形图
3.1 Echo Profile ,观察波峰位置。