机械手搬运ppt
- 格式:ppt
- 大小:742.50 KB
- 文档页数:16
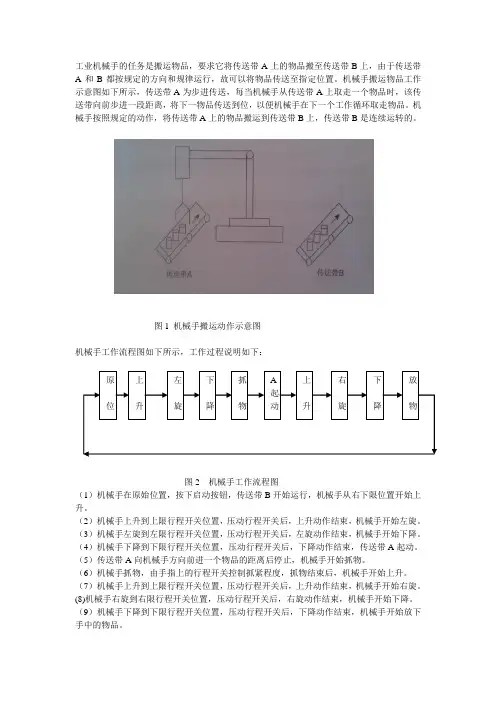
工业机械手的任务是搬运物品,要求它将传送带A 上的物品搬至传送带B 上,由于传送带A 和B 都按规定的方向和规律运行,故可以将物品传送至指定位置。
机械手搬运物品工作示意图如下所示,传送带A 为步进传送,每当机械手从传送带A 上取走一个物品时,该传送带向前步进一段距离,将下一物品传送到位,以便机械手在下一个工作循环取走物品。
机械手按照规定的动作,将传送带A 上的物品搬运到传送带B 上,传送带B 是连续运转的。
图1 机械手搬运动作示意图机械手工作流程图如下所示,工作过程说明如下:图2 机械手工作流程图(1)机械手在原始位置,按下启动按钮,传送带B 开始运行,机械手从右下限位置开始上升。
(2)机械手上升到上限行程开关位置,压动行程开关后,上升动作结束,机械手开始左旋。
(3)机械手左旋到左限行程开关位置,压动行程开关后,左旋动作结束,机械手开始下降。
(4)机械手下降到下限行程开关位置,压动行程开关后,下降动作结束,传送带A 起动。
(5)传送带A 向机械手方向前进一个物品的距离后停止,机械手开始抓物。
(6)机械手抓物,由手指上的行程开关控制抓紧程度,抓物结束后,机械手开始上升。
(7)机械手上升到上限行程开关位置,压动行程开关后,上升动作结束,机械手开始右旋。
(8)机械手右旋到右限行程开关位置,压动行程开关后,右旋动作结束,机械手开始下降。
(9)机械手下降到下限行程开关位置,压动行程开关后,下降动作结束,机械手开始放下手中的物品。
原 位 上 升 左 旋 下 降 A 起 动 上 升 右 旋 下 降 放 物 抓 物(10)机械手放物经过一个适当的延时,放物结束,一个工作循环完毕。
要求由SA的4对触点分别接通实现4种工作方式:连续循环、单循环、分步运行、点动工作。
连续循环:按SB1后取放一次工件回到原位后等待5秒后自动下一个循环。
按停止按钮结束本次工作后停止。
按复位按钮后所有动作停止(除夹紧动作,复位按钮同样适用于单循环与分步动作)。