自动控制原理第三章习题解答
- 格式:pdf
- 大小:131.34 KB
- 文档页数:14

3-1 解 该线圈的微分方程为 u =+diiR L dt对上式两边取拉氏变换,并令初始条件为零,可得传递函数为()1=()(+)+1I s RU s L R 时间常数+0.005T L R s ==,过渡时间=30.015s t T s =。
3-2 解 如图2-3-2所示系统的闭环传递函数为010()=(s)0.2+1+10+1H K C s KR S K Ts =其中0101+10H K K K =,0.21+10HT K =原系统的时间常数为0.2s ,放大系数为10,为了满足题目的要求,令0.02T s =和10K =,有0.9H K =和010K =。
3-3 解 设为温度计的输入,表示实际水温,设为温度计的输出,表示温度计的指示值,若实际水温为R (常值),则输入为幅值为R 的阶跃函数,输出为(t)=R(1-e )T c τ根据所给条件,有则时间常数。
3-4 解:所给传递函数的闭环极点为21,2=-1-n n s j ζωωζ±根据上式表达式,可以确定图2-3-3中的阴影部分为闭环极点可能位于的区域(考虑到对称性,只绘出s 平面的上半平面)。
图2-3-3 闭环极点可能位于的区域3-5解:典型二阶系统的传递函数为由如图2-3-4所示的响应曲线,可知峰值时间,超调量,根据二阶系统的性能指标计算公式和可以确定和,根据如图2-3-4所示曲线的终值,可以确定。
3-6 解:如图2-3-5所示系统的传递函数为是一个典型的二阶系统,其自然振荡频率为,令阻尼比可以确定,性能指标及分别为3-7 解:系统为典型二阶系统,自然振荡频率,阻尼比。
单位阶跃响应的表达式为(t>0)单位斜坡响应的表达式为3-8 解:当时,系统的闭环传递函数为其中,无阻尼自然振荡频率,阻尼比,单位阶跃响应的超调量峰值时间和过度过程时间分别为16.3%、0,36s和0.7s当,时系统的闭环传递函数为其中,无阻尼自然振荡频率,阻尼比,单位阶跃响应的超调量、峰值时间和过渡过程时间分别为30.9%、0.24s和0.7s。
第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C `闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s C t e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK !用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T sTs Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 203-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。
第三章习题答案名词解释1.超调量:系统响应的最大值与稳态值之差除以稳态值。
定义为)()(max ∞∞-=c c c σ 2.开环传递函数中含有2个积分因子的系统称为II 型系统。
3.单位阶跃响应达到第一个峰值所需时间。
4.指响应达到并保持在终值5%内所需要的最短时间。
5. 稳态误差:反馈系统误差信号e(t) 的稳态分量(1分),记作e ss (t)。
6.开环传递函数中不含有积分因子的系统。
7.上升时间:○1响应从终值10%上升到终值90%所需的时间;或○2响应从零第一次上升到终值所需的时间。
简答1. 在实际控制系统中,总存在干扰信号。
1) 时域分析:干扰信号变化速率快,而微分器是对输入信号进行求导,因此干扰信号通过微分器之后,会产生较大的输出;2) 频域分析:干扰信号为高频信号,微分器具有较高的高频增益,因此干扰信号易被放大。
这就是实际控制系统中较少使用纯微分器的原因。
2.系统稳定的充分条件为:劳斯阵列第一列所有元素不变号。
若变号,则改变次数代表正实部特征根的数目。
3.二阶临界阻尼系统特征根在负实轴上有两个相等的实根,其单位阶跃响应为单调递增曲线,最后收敛到一个稳态值。
4. 闭环特征根严格位于s 左半平面;或具有负实部的闭环特征根。
5.欠阻尼状态下特征根为一对具有负实部的共轭复数,单位阶跃响应是一个振荡衰减的曲线,最后收敛到一个稳态值。
6.阻尼小于-1的系统,特征根位于正实轴上,单位阶跃响应是一个单调发散的曲线。
7. 无阻尼状态下特征根为一对虚根,响应为等幅振荡过程,永不衰减。
8.图4(a)所示系统稳定,而图4(b)所示系统不稳定。
原因是图4(b)所示系统的小球收到干扰后将不能恢复到原来的平衡状态。
9.不能。
原因是:两个一阶惯性环节串联后的极点为实极点;而二阶振荡环节的极点为复数极点。
计算题1. 解:r(t)=2t.v=1,系统为I 型系统k v =2,e ss =1.2.解:构造Routh 表:25:010:255:03/803/16:25203:35121:012345s s s s s s辅助方程:02552=+s 故纯虚根为:j s 52,1±=;故系统处于临界稳定状态。
自动控制理论第三章作业答案题3-4解:系统的闭环传递函数为C(s)_ G(s) _ 1^(5)"l + G (5)"52+5 + l由二阶系统的标准形式可以得到。
”=1,:=占峰值时间 t= — = 一二_: = 3.62765 叫©7^A = 5% f$ 心 = 6s 调整时间:必4△ = 2% 化心 ------- =8J 超调島 M p =e100%-16.3%q =A ^0 广_ 5" +1,"2A /10 => a = 0.5589闭环传递函数誥h + 因此,上升时间t 严乞丄3d研=1° = 0.6= 2.4185超调量必卩=「翼x 100% =兰二! = 30%<=0.3579© = 33.64题3・8特征方程为?+8^2+245 + 100 = 0列出劳斯表:531 52 8 s 11.5s° 100⑵G (沪W)s(s-l)(s + 5)71 =l ・242sM 严 八r xl00% = △ = 5% 3 a ------ = 1.5815 叱 A = 2% 4 t 5 a ------ = 2」08$ 题3・7解:9.45%1131.9开环传递函数G (沪花现)右24.陂100 (1)G (S )_5(52+85 + 24)100 解:闭环传递函数为需乙“仏+ 24) + 10024 1000 第一列都是正数,所以系统稳立10(5 + 1)W:闭环传递函数器^s(s — l)(s + 5) + 10($ +l)特征方程为S3+5S2+5S +1O=O列出劳斯表:53 1 5 052 4 10 0s 2.5 05°10第一列都是正数,所以系统稳立⑶ G(s) = ---------- -- -------5(5-1)(2^ + 3)一)黑3) + 1。
解:闭环传递函数需=特征方程为2$' +疋一3s +10 = 0列出劳斯表:53 2 -3 0S2 1 10 0S1-23 05°10劳斯表第一列的数符号变了2次,因此在s平而的右半部分有两个特征根,系统不稳左。
例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,4 30 t图3-34 二阶控制系统的单位阶跃h (t )而是3。
第三章例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的0.1倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。
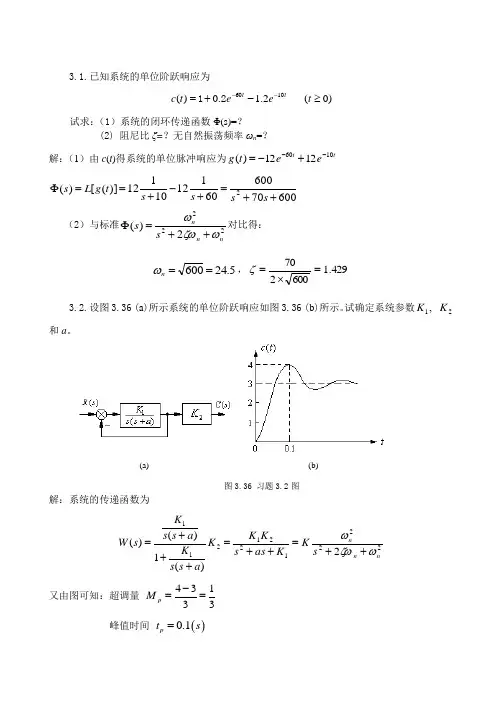
3.1.已知系统的单位阶跃响应为)0(2.1.0)(16≥-+=--t e e t c tt 0021试求:(1)系统的闭环传递函数Φ(s)=?(2) 阻尼比ζ=?无自然振荡频率ωn =? 解:(1)由c (t )得系统的单位脉冲响应为t te et g 10601212)(--+-=600706006011210112)]([)(2++=+-+==Φs s s s t g L s (2)与标准2222)(nn ns s ωζωω++=Φ对比得: 5.24600==n ω,429.1600270=⨯=ζ3.2.设图3.36 (a )所示系统的单位阶跃响应如图3.36 (b )所示。
试确定系统参数,1K 2K 和a 。
(a) (b)图3.36 习题3.2图解:系统的传递函数为22212212112)(1)()(nn n s K K as s K K K a s s K a s s K s W ωζωω++=++=+++= 又由图可知:超调量 43133p M -== 峰值时间 ()0.1p t s =代入得⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧==-==--221121.01312K K eK n n ζωπωζζπ 解得:213ln ζζπ-=;33.0≈ζ,3.331102≈-=ζπωn ,89.110821≈=nK ω, 98.213.3333.022≈⨯⨯≈=n a ζω,32==K K 。
3.3. 给定典型二阶系统的设计性能指标:超调量p σ5≤%,调节时间 s t 3<s ,峰值时间1<p t s ,试确定系统极点配置的区域,以获得预期的响应特性。
解:设该二阶系统的开环传递函数为()()22nn G s s s ωξω=+ 则满足上述设计性能指标:⎪⎪⎪⎩⎪⎪⎪⎨⎧<-=<=≤=--113305.0212ζωπζωσζζπn p ns p t t e得:69.0≥ζ,1>n ζωπζω>-21n由上述各不等式得系统极点配置的区域如下图阴影部分所示:3.4.设一系统如图3.37所示。

第三章 线性系统的时域分析与校正习题及答案3-1 已知系统脉冲响应t 25.1e 0125.0)t (k -=,试求系统闭环传递函数)s (Φ。
解 [])25.1s /(0125.0)t (k L )s (+==Φ3-2 一阶系统结构如图所示。
要求单位阶跃输入时调节时间4.0t s ≤s (误差带为5%),稳态输出为2,试确定参数21k ,k 的值。
解 由结构图写出闭环系统传递函数 1k k s k 1k k s k sk k 1s k )s (212211211+=+=+=Φ 闭环增益2k 1k 2==Φ, 得:5.0k 2= 令调节时间4.0k k 3T 3t 21s ≤==,得:15k 1≥。
3-3 给定典型二阶系统的设计指标:超调量0<%32.4%≤σ,调节时间 s 5.0t s <,峰值时间s 1t p <,试确定系统极点配置的区域,以获得预期的响应特性。
解 依题 %32.4%≤σ, )45(707.0︒≤≥⇒βξ;5.05.3t ns <ωξ=, 7n >ωξ⇒; n p t ωξπ21-=1<, 14.312>-⇒n ωξ综合以上条件可画出满足要求的特征根区域如图所示。
3-4 电子心脏起博器心律控制系统结构如图所示,其中模仿心脏的传递函数相当于一纯积分环节。
解 依题,系统传递函数为2n n 22n 2s 2s 05.0K s 05.01s 05.0K)s (ω+ξω+ω=++=Φ ⎪⎪⎩⎪⎪⎨⎧ω⨯=ξ=ωn n 205.0105.0K 令 5.0=ξ可解出 ⎩⎨⎧=ω=2020K n将 s 1t =代入二阶系统阶跃响应公式 ()β+ωξ-ξ--=ξω-t 1sin 1e 1)t (h n 22tn 可得 min 00145.60s 000024.1)1(h 次次==5.0=ξ时,系统超调量 %3.16%=σ,最大心速为min 78.69163.1163.01t (h p 次次)==+=3-5 机器人控制系统结构如图所示, 试确定参数21k ,k 值,使系统阶跃响应的峰值时间5.0t p =s ,超调量%2%=σ。
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
3-3 解:该二阶系统的最大超调量:%100*21/ζζπσ--=ep当%5=pσ时,可解上述方程得:69.0=ζ当%5=pσ时,该二阶系统的过渡时间为:ns w t ζ3≈所以,该二阶系统的无阻尼自振角频率17.22*69.033==≈sn t w ζ3-4 解:由上图可得系统的传递函数:10)51(*2)1(*10)2()1(*101)2()1(*10)()(2++++==+++++=s K s Ks s s Ks s s Ks s R s C所以10=n w ,K w n 51+=ζ⑴ 若5.0=ζ时,116.0≈K 所以116.0≈K 时,5.0=ζ⑵ 系统单位阶跃响应的超调量和过渡过程时间分别为:9.110*5.033%3.16%100*%100*225.01/14.3*5.01/≈==≈==----ns pw t e eζσζζπ⑶ 加入)1(Ks +相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变化率)提高了,从而缩短了过渡时间:总之,加入)1(Ks +后,系统响应性能得到改善。
3-5 解:由上图可得该控制系统的传递函数:12110)110(10)()(K s s K s R s C +++=τ二阶系统的标准形式为:2222)()(nn nws w s w s R s C ++=ζ所以11021012+==τζn n w K w由5.0%5.91%100*21/2==-==--p pn p pt w t eσζπσζζπ可得85.76.0==n w ζ由11021012+==τζn n w K w 和85.76.0==n w ζ可得:64.0384.016.61=≈==ns w t K ζτ3-6 解:⑴ 列出劳斯表为:因为劳斯表首列系数符号变号2次,所以系统不稳定。
⑵ 列出劳斯表为:因为劳斯表首列系数全大于零,所以系统稳定。
自动控制原理第三章课后习题答案(免费)3-1 判别下列系统的能控性与能观性。
系统中a,b,c,d 的取值对能控性与能观性是否有关,若有关其取值条件如何?(1)系统如图所示。
题3-1(1)图 系统模拟结构图解: 状态变量:11223123434x ax u x bx x x x cx x x dx =+=-=+-=+输出变量: 3y x =由此写出状态空间:0001000011000010(0010)a b x x u c d Y x⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪=+ ⎪ ⎪- ⎪ ⎪⎝⎭⎝⎭= 223333[1,0,0,0],[,0,1,0],[,0,,1],[,0,,]T T T B AB a A B a a c A B a a ac c a c d ==-=--=-++---判断能控型:()2323221000001001c a a a U BABA BA B a c a ac c a c d ⎛⎫-- ⎪⎪== ⎪--++ ⎪ ⎪---⎝⎭4c rankU ≠,所以系统不完全能控,讨论系统能控性:判断能观性:022322222001011000C CA c U CA a c b c c CA a ac c b bc c c ⎛⎫⎛⎫ ⎪ ⎪-⎪ ⎪== ⎪ ⎪---- ⎪ ⎪++++-⎝⎭⎝⎭04rankU ≠,所以系统不能观.(2)系统如图所示。
题3-1(2)图 系统模拟结构图解: 状态变量:()1211101[,]1c x a b x ux c d y xa b U B AB c d -⎛⎫⎛⎫⎛⎫=+ ⎪ ⎪ ⎪--⎝⎭⎝⎭⎝⎭=-+⎛⎫== ⎪--⎝⎭若0,a b c d b ----≠则2c rankU =,系统能控.010C U CA a b ⎛⎫⎛⎫== ⎪ ⎪-⎝⎭⎝⎭若0b ≠,则02rankU =,系统能观.(3)系统如下式:1122331122311021010000200000x x x a ux x b x x y c d x y x ∙∙∙⎛⎫-⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪ ⎪=-+⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭ ⎪⎝⎭⎛⎫⎛⎫⎛⎫ ⎪= ⎪ ⎪⎪⎝⎭⎝⎭ ⎪⎝⎭解:系统如下:1231122311021010000200000x x x a u x b x y c d x y x -⎛⎫⎛⎫⎛⎫ ⎪⎪ ⎪=-+ ⎪⎪ ⎪ ⎪⎪ ⎪-⎝⎭⎝⎭⎝⎭⎛⎫⎛⎫⎛⎫ ⎪= ⎪ ⎪ ⎪⎝⎭⎝⎭ ⎪⎝⎭若0,0a b ≠≠,系统能控.若0,0c d ≠≠,系统能观.3-2 时不变系统:311113111111x x u y x ∙-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭⎛⎫= ⎪-⎝⎭试用两种方法判别其能控性与能观性。