3-8 曲率
- 格式:ppt
- 大小:541.00 KB
- 文档页数:11
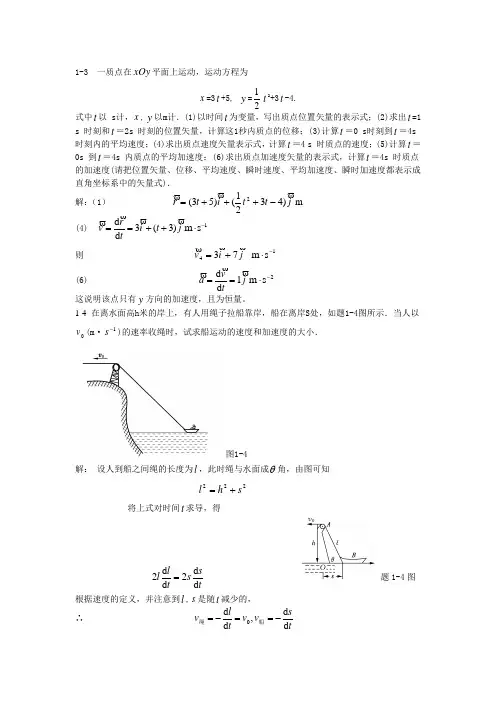
1-3 一质点在xOy 平面上运动,运动方程为x =3t +5, y =21t 2+3t -4.式中t 以 s 计,x ,y 以m 计.(1)以时间t 为变量,写出质点位置矢量的表示式;(2)求出t =1 s 时刻和t =2s 时刻的位置矢量,计算这1秒内质点的位移;(3)计算t =0 s 时刻到t =4s 时刻内的平均速度;(4)求出质点速度矢量表示式,计算t =4 s 时质点的速度;(5)计算t =0s 到t =4s 内质点的平均加速度;(6)求出质点加速度矢量的表示式,计算t =4s 时质点的加速度(请把位置矢量、位移、平均速度、瞬时速度、平均加速度、瞬时加速度都表示成直角坐标系中的矢量式).解:(1) j t t i t r)4321()53(2-+++=m (4) 1s m )3(3d d -⋅++==j t i tr v则 j i v734+= 1s m -⋅(6) 2s m 1d d -⋅==j tv a这说明该点只有y 方向的加速度,且为恒量。
1-4 在离水面高h 米的岸上,有人用绳子拉船靠岸,船在离岸S 处,如题1-4图所示.当人以0v (m ·1-s)的速率收绳时,试求船运动的速度和加速度的大小.图1-4解: 设人到船之间绳的长度为l ,此时绳与水面成θ角,由图可知 222s h l +=将上式对时间t 求导,得ts stl ld d 2d d 2= 题1-4图根据速度的定义,并注意到l ,s 是随t 减少的, ∴ ts v v tl v d d ,d d 0-==-=船绳即 θcos d d d d 00v v sl tl s l ts v ==-=-=船或 sv s h slv v 02/1220)(+==船将船v 再对t 求导,即得船的加速度32022222002)(d d d d d d sv h sv sls v slv s v v st s l tl s tv a =+-=+-=-==船船1-6 已知一质点作直线运动,其加速度为 a =4+3t 2s m -⋅,开始运动时,x =5 m , v =0,求该质点在t =10s 时的速度和位置. 解:∵ t tv a 34d d +==分离变量,得 t t v d )34(d += 积分,得12234c t t v ++=由题知,0=t ,00=v ,∴01=c 故 2234t t v += 又因为 2234d d t t tx v +==分离变量, t t t x d )234(d 2+=积分得 232212c t t x ++=由题知 0=t ,50=x ,∴52=c 故 521232++=t t x所以s 10=t 时m70551021102sm 190102310432101210=+⨯+⨯=⋅=⨯+⨯=-x v1-8 质点沿半径为R 的圆周按s =2021bt t v -的规律运动,式中s 为质点离圆周上某点的弧长,0v ,b 都是常量,求:(1)t 时刻质点的加速度;(2) t 为何值时,加速度在数值上等于b . 解:(1) bt v ts v -==0d dRbt v Rva b t v a n 202)(d d -==-==τ则 240222)(Rbt v b aa a n-+=+=τ加速度与半径的夹角为20)(arctanbt v Rb a a n--==τϕ(2)由题意应有2402)(Rbt v b b a -+==即 0)(,)(4024022=-⇒-+=bt v Rbt v b b∴当bv t 0=时,b a =1-10 以初速度0v =201s m -⋅抛出一小球,抛出方向与水平面成幔 60°的夹角,求:(1)球轨道最高点的曲率半径1R ;(2)落地处的曲率半径2R . (提示:利用曲率半径与法向加速度之间的关系)解:设小球所作抛物线轨道如题1-10图所示.题1-10图(1)在最高点,o0160cos v v v x == 21sm 10-⋅==g a n又∵ 1211ρv a n =∴m1010)60cos 20(22111=︒⨯==n a v ρ(2)在落地点,2002==v v 1sm -⋅,而 o60cos 2⨯=g a n ∴ m 8060cos 10)20(22222=︒⨯==n a v ρ2-3 283166-⋅===sm m f a x x2167-⋅-==s m mf a y y(1)⎰⎰--⋅-=⨯-=+=⋅-=⨯+-=+=2101200872167452832sm dt a v v s m dt a v v y y y x x x于是质点在2s 时的速度18745-⋅--=sm ji v(2) mji j i jt a i t a t v r y x 874134)167(21)4832122(21)21(220--=⨯-+⨯⨯+⨯-=++= 2-4 (1)∵dtdv mkv a =-=分离变量,得m kdt v dv -=即⎰⎰-=vv tmkdt v dv 0mkt ev v -=ln ln∴ tmk e v v -=0(2)⎰⎰---===tttmk mk ekmv dt ev vdtx 000)1((3)质点停止运动时速度为零,即t →∞, 故有⎰∞-=='000kmv dt ev x tmk(4)当t=km 时,其速度为ev ev ev v km m k 0100===-⋅-即速度减至v 0的e1.2-7由题知,小球落地时间为0.5s .因小球为平抛运动,故小球落地的瞬时向下的速度大小为v 1=gt=0.5g ,小球上跳速度的大小亦为v 2=0.5g .设向上为y 轴正向,则动量的增量 Δp=mv 2-mv 1 方向竖直向上,大小 |Δp |=mv 2-(-mv 1)=mg碰撞过程中动量不守恒.这是因为在碰撞过程中,小球受到地面给予的冲力作用.另外,碰撞前初动量方向斜向下,碰后末动量方向斜向上,这也说明动量不守恒. 2-12 (1)由题知,F 合为恒力,∴ A 合=F ·r=(7i-6j)·(-3i+4j+16k)=-21-24=-45 J (2)w tA N 756.045==∆=(3)由动能定理,ΔE k =A=-45 J2-15 弹簧A 、B 及重物C 受力如题2-15图所示平衡时,有题2-15图 F A =F B =Mg 又 F A =k 1Δx 1 F B =k 2Δx 2所以静止时两弹簧伸长量之比为 1221k k x x =∆∆弹性势能之比为12222211121212k k x k x k E E p p=∆∆=2-20 两小球碰撞过程中,机械能守恒,有222120212121mv mv mv +=即 222120v v v += ①3-7 观测者甲乙分别静止于两个惯性参考系S 和S '中,甲测得在同一地点发生的两事件的时间间隔为 4s ,而乙测得这两个事件的时间间隔为 5s .求: (1) S '相对于S 的运动速度.(2)乙测得这两个事件发生的地点间的距离.解: 甲测得0,s 4==x t ∆∆,乙测得s 5=t ∆,坐标差为12x x x '-'='∆′ (1)∴ t cv tx cv t t ∆-∆=∆+∆='∆22)(11)(λγ54122='∆∆=-t t cv解出 c c t t c v 53)54(1)(122=-='∆∆-=8108.1⨯= 1s m -⋅(2) ()0,45,=∆=∆'∆=∆-∆='∆x tt t v x x γγ∴ m 1093453458⨯-=-=⨯⨯-=-='c c t v x ∆γ∆负号表示012<'-'x x . 3-8 一宇航员要到离地球为5光年的星球去旅行.如果宇航员希望把这路程缩短为3光年,则他所乘的火箭相对于地球的速度是多少? 解: 2220153,1513βββ-=-=-=='则l l∴ c c v 542591=-=3-11 根据天文观测和推算,宇宙正在膨胀,太空中的天体都远离我们而去.假定地球上观察到一颗脉冲星(发出周期无线电波的星)的脉冲周期为 0.50s ,且这颗星正沿观察方向以速度0.8c 离我们而去.问这颗星的固有周期为多少?解: 以脉冲星为S '系,0='∆x ,固有周期0τ='∆t .地球为S 系,则有运动时t t '∆=∆γ1,这里1t ∆不是地球上某点观测到的周期,而是以地球为参考系的两异地钟读数之差.还要考虑因飞行远离信号的传递时间,ct v 1∆∴ t cv t c t v t t ∆+'∆=∆+∆=∆γγ11′)1(cv t +'=∆γ6.01)8.0(112=-=c c γ则 γλτ)8.01(5.0)1(0c c cv t t +++∆='∆=s 1666.08.13.06.01)8.01(5.0==+=3-16 静止在S 系中的观测者测得一光子沿与x 轴成︒60角的方向飞行.另一观测者静止于S ′系,S ′系的x '轴与x 轴一致,并以0.6c 的速度沿x 方向运动.试问S ′系中的观测者观测到的光子运动方向如何? 解: S 系中光子运动速度的分量为c c v x 500.060cos ο==c c v y 866.060sin ο==由速度变换公式,光子在S '系中的速度分量为c ccc c c v cu u v v xx x143.05.06.016.05.0122-=⨯--=--='c ccc c v cu v cu v xyy 990.05.06.01866.06.011122222=⨯-⨯-=--='光子运动方向与x '轴的夹角θ'满足692.0tan -=''='xy v v θθ'在第二象限为ο2.98='θ在S '系中,光子的运动速度为c v v v y x='+'='22 正是光速不变. 3-17 (1)如果将电子由静止加速到速率为0.1c ,须对它作多少功?(2)如果将电子由速率为0.8c 加速到0.9c ,又须对它作多少功?解: (1)对电子作的功,等于电子动能的增量,得)111()1(222020202--=-=-==cv c m c m cm mcE E k k γ∆)11.011()103(101.922831--⨯⨯⨯=-161012.4-⨯=J=eV 1057.23⨯(2) )()(2021202212c m c m c m c m E E E k k k---=-='∆)1111(221222202122cv cv c m cm c m ---=-=))8.0119.011(103101.92216231---⨯⨯⨯=-J 1014.514-⨯=eV 1021.35⨯=4-2 劲度系数为1k 和2k 的两根弹簧,与质量为m 的小球按题4-2图所示的两种方式连 接,试证明它们的振动均为谐振动,并分别求出它们的振动周期.题4-2图解:(1)图(a)中为串联弹簧,对于轻弹簧在任一时刻应有21F F F ==,设串联弹簧的等效倔强系数为串K 等效位移为x ,则有111x k F x k F -=-=串222x k F -=又有 21x x x +=2211k F k F k F x +==串所以串联弹簧的等效倔强系数为2121k k k k k +=串即小球与串联弹簧构成了一个等效倔强系数为)/(2121k k k k k +=的弹簧振子系统,故小球作谐振动.其振动周期为2121)(222k k k k m k m T +===ππωπ串(2)图(b)中可等效为并联弹簧,同上理,应有21F F F ==,即21x x x ==,设并联弹簧的倔强系数为并k ,则有2211x k x k x k +=并故 21k k k +=并 同上理,其振动周期为212k k m T +='π4-5 一个沿x 轴作简谐振动的弹簧振子,振幅为A ,周期为T ,其振动方程用余弦函数表示.如果0=t 时质点的状态分别是:(1)A x -=0;(2)过平衡位置向正向运动; (3)过2A x =处向负向运动; (4)过2A x -=处向正向运动.试求出相应的初位相,并写出振动方程. 解:因为 ⎩⎨⎧-==000sin cos φωφA v A x将以上初值条件代入上式,使两式同时成立之值即为该条件下的初位相.故有)2cos(1πππφ+==t TA x)232cos(232πππφ+==t T A x)32cos(33πππφ+==t TA x)452cos(454πππφ+==t TA x4-7 有一轻弹簧,下面悬挂质量为g 0.1的物体时,伸长为cm 9.4.用这个弹簧和一个质量为g 0.8的小球构成弹簧振子,将小球由平衡位置向下拉开cm 0.1后 ,给予向上的初速度10scm 0.5-⋅=v ,求振动周期和振动表达式.解:由题知 12311mN 2.0109.48.9100.1---⋅=⨯⨯⨯==x g m k而0=t 时,-12020s m 100.5m,100.1⋅⨯=⨯-=--v x ( 设向上为正)又 s 26.12,51082.03===⨯==-ωπωT mk 即m102)5100.5()100.1()(22222220---⨯=⨯+⨯=+=∴ωv x A45,15100.1100.5tan 022000πφωφ==⨯⨯⨯=-=--即x v∴ m )455cos(1022π+⨯=-t x4-8 图为两个谐振动的t x -曲线,试分别写出其谐振动方程.题4-8图解:由题4-8图(a),∵0=t 时,s 2,cm 10,,23,0,0000===∴>=T A v x 又πφ即 1s rad 2-⋅==ππωT故 m )23cos(1.0ππ+=t x a由题4-8图(b)∵0=t 时,35,0,2000πφ=∴>=v A x01=t 时,22,0,0111ππφ+=∴<=v x又 ππωφ253511=+⨯=∴ πω65=故 m t x b )3565cos(1.0ππ+=4-12 试用最简单的方法求出下列两组谐振动合成后所得合振动的振幅:(1) ⎪⎩⎪⎨⎧+=+=cm )373cos(5cm )33cos(521ππt x t x (2)⎪⎩⎪⎨⎧+=+=cm)343cos(5cm )33cos(521ππt x t x 解: (1)∵ ,233712πππφφφ=-=-=∆∴合振幅 cm 1021=+=A A A (2)∵ ,334πππφ=-=∆∴合振幅 0=A4-13 一质点同时参与两个在同一直线上的简谐振动,振动方程为⎪⎩⎪⎨⎧-=+=m)652cos(3.0m )62cos(4.021ππt x t x 试分别用旋转矢量法和振动合成法求合振动的振动幅和初相,并写出谐振方程。
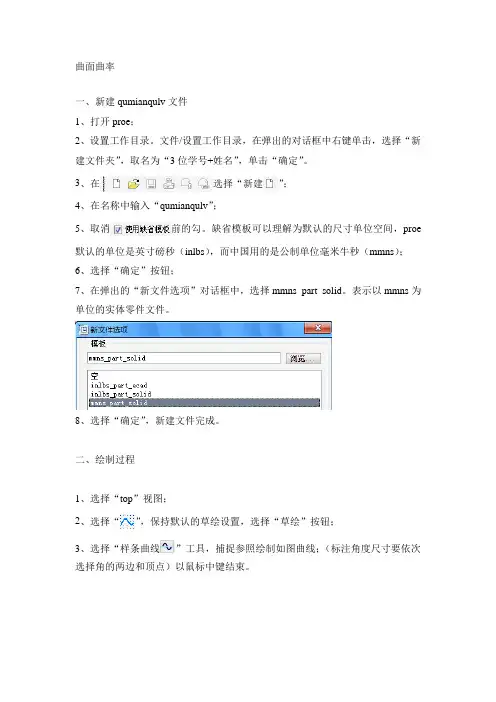
曲面曲率一、新建qumianqulv文件1、打开proe;2、设置工作目录。
文件/设置工作目录,在弹出的对话框中右键单击,选择“新建文件夹”,取名为“3位学号+姓名”,单击“确定”。
3、在选择“新建”;4、在名称中输入“qumianqulv”;5、取消前的勾。
缺省模板可以理解为默认的尺寸单位空间,proe 默认的单位是英寸磅秒(inlbs),而中国用的是公制单位毫米牛秒(mmns);6、选择“确定”按钮;7、在弹出的“新文件选项”对话框中,选择mmns_part_solid。
表示以mmns为单位的实体零件文件。
8、选择“确定”,新建文件完成。
二、绘制过程1、选择“top”视图;2、选择“”,保持默认的草绘设置,选择“草绘”按钮;3、选择“样条曲线”工具,捕捉参照绘制如图曲线;(标注角度尺寸要依次选择角的两边和顶点)以鼠标中键结束。
4、修改尺寸。
此时所有尺寸为灰色,表示是“弱尺寸”。
双击长度尺寸,修改为25。
双击高度尺寸,修改为70。
曲线的两端均为90度。
修改后,尺寸颜色变为亮色,表示是强尺寸。
5、在“菜单栏”选择“插入”,选择“扫描”-“曲面”,在下拉“菜单管理器”中选择“选取轨迹”按鼠标中建选择默认设置。
6、进入截面绘制阶段,选择工具栏命令绘制如图直线,并将角度修改为88度,高度修改为87、选择工具栏结束截面绘制,按鼠标中键确定。
8、选择工具栏“基准平面”工具,选择top平面,输入平移距离为12,选择确定9、选择工具栏工具,选择DTM1平面,进入草绘绘制,选择命令,绘制如图曲线,尺寸修改方法同上。
10、选择“草绘2”,在菜单栏选择“编辑”,选择“填充”命令。
11,选择工具栏工具,点击工具栏按钮,选择front面,继续选择工具选择平面按钮,按shift键捕捉两个已知面的端点,绘制如图所示平面曲线,点结束。
11、双击所绘曲线,进去编辑命令,左键点击曲线端点,然后长按右键点击黄色线段,在下拉菜单中选择“曲面曲率”,在曲线的另一端点进行同样操作,得到如图所示曲线12,用同样方法绘制如图所示曲线,选择命令,点击front面,在点出窗口中输入36,用同样方法在DTM2上建立曲线,如图所示。
第五章梁的变形测试练习1.判断改错题5-1-1梁上弯矩最大的截面,挠度也最大,弯矩为零的截面,转角亦为零.()5-1-2两根几何尺寸、支承条件完全相同的静定梁,只要所受荷栽相同,则两梁所对应的截面的挠度及转角相同,而与梁的材料是否相同无关。
()5-1-3悬臂梁受力如图所示,若A点上作用的集中力P在A B段上作等效平移,则A截面的转角及挠度都不变。
()5-1-4图示均质等直杆(总重量为W),放置在水平刚性平面上,若A端有一集中力P作用,使A C部分被提起,C B部分仍与刚性平面贴和弯矩均为零。
()5-1-5挠曲线近似微分方程不能用于求截面直梁的位移。
()5-1-6等截面直梁在弯曲变形时,挠度曲线的曲率最大值发生在转角等于零的截面处。
()5-1-7两简支梁的抗刚度E I及跨长2a均相同,受力如图所示,则两梁跨中截面的挠度不等而转角是相等的。
()5-1-8简支梁在图示任意荷载作用下,截面C产生挠度和转角,若在跨中截面C又加上一个集中力偶M0作用,则梁的截面C的挠度要改变,而转角不变。
()题5-1-3图B题5-1-4图C5-1-9 一铸铁简支梁,在均布载荷作用下,当其横截面相同且分别按图示两种情况放置时,梁同一截面的应力及变形均相同。
( ) 5-1-10 图示变截面梁,当用积分法求挠曲线方程时,因弯矩方程有三个,则通常有6个积分常量。
( )2.填空题5-2-1 挠曲线近似微分方程EIx M x y )()("-= 的近似性表现在 和 。
5-2-2 已知图示二梁的抗弯度E I 相同,若使二者自由端的挠度相等,则21P P 。
5-2-3 应用叠加原理求梁的变形时应满足的条件是: 。
5-2-4 在梁的变形中挠度和转角之间的关系是 。
5-2-5 用积分法求图示的外伸梁(B D 为拉杆)的挠曲线方程时,求解积分常量所用到的边界条件是 ,连续条件是 。
5-2-6 用积分法求图示外伸梁的挠曲线方程时,求解积分常量所用到边界条件是,题5-1-9图题5-1-10图题5-2-2图连续条件是 。
眼科检查的正常值眼球前后径24mm,垂直径23mm,水平径23.5mm前内轴长(角膜内面~视网膜内面)22.12mm,容积6.5ml,重量7g突出度12~14mm,两眼相差不超过2mm睑裂平视时高8mm,上睑遮盖角膜1~2mm,长26~30mm 内睑间距30~35mm,平均34mm外睑间距88~92mm,平均90mm睑板中央部宽度上睑6~9mm,下睑5mm睫毛上睑100~150mm根,下睑50~75根。
平视时倾斜度分别110°~130°,100°~120°,寿命3~5个月。
拔除后1周生长1~ 2mm,10周可达正常长度结膜结膜囊深度(睑缘至穹隆部深处)上方20mm,下方10mm 穹隆结膜与角膜距离上下方均为8~10mm,颞侧14mm,鼻侧7mm泪器泪小点直径0.2~0.3mm,距内眦6~6.5mm泪小管直径0.5~0.8mm,垂直部1~2mm,水平部8mm直径可扩张3倍泪囊长10mm,宽3mm鼻泪管全长18mm,下口位于下鼻甲前端之后16mm泪囊窝长17.86mm,宽8.01mm泪腺眶部20mm311mm35mm,重0.75g睑部15mm37mm33mm,重0.2g泪液正常清醒状态下,每分钟分泌0.9~2.2ul每眼泪液量7~12ul比重1.008,PH 7.35,屈光指数1.336渗透压295~309mOms/L,平均305mOms/L眼眶深40~50mm,容积25~28ml视神经孔直径4~6mm,视神经管长4~9mm眼外肌肌腱肌宽度内直肌10.3mm,外直肌9.2mm,上直肌10.8mm,下直肌9.8mm,上斜肌9.4mm,下斜肌9.4mm直肌止点距角膜缘内直肌5.5mm,下直肌6.5mm,外直肌6.9mm,上直肌7.7mm锯齿缘距角膜缘7~8mm赤道部距角膜缘14.5mm黄斑部距下斜肌最短距离(下斜肌止端鼻侧缘内上)2.2mm,距赤道18~22mm角膜横径11.5~12mm,垂直径10.5~11mm厚度中央部0.5~0.55mm,周边部1mm曲率半径前面7.8mm,后面6.8mm屈光力前面+48.83D,后面-5.88D,总屈光力+43D屈光指数1.337内皮细胞数2899±410/mm2角膜缘宽1.5~2mm巩膜厚度眼外肌附着处0.3mm,赤部0.4~0.6mm,视神经周围1.0mm 瞳孔直径 2.5~4mm(双眼差<0.25mm)瞳距男60.9mm,女58.3mm前房中央深度2.5~3mm房水容积0.15~0.3ml,前房0.2ml,后房0.06ml比重1.006,PH 7.5~7.6屈光指数1.3336~1.336生成速率(2~3)ul/min氧分压55mmHg,二氧化碳分压40~60mmHg睫状体宽度约6~7mm晶状体直径9mm,厚度4mm,体积0.2ml曲率半径前面10mm,后面6mm屈光指数1.437屈光力前面+7D,后面+11.66D,总屈光力+19D玻璃体容积4.5ml,屈光指数1.336脉络膜平均厚度约0.25mm,脉络膜上腔间隙10~35um视网膜视盘直径1.531.75mm黄斑直径2mm,中心凹位于视乳头颞侧缘3mm,视盘中心水平线下0.8mm视网膜动脉直径比例动脉∶静脉=2∶3视网膜中央动脉收缩压60~75mmHg,舒张压mmHg视神经全长40mm(眼内段1,眶内段25~30,管内段6~10,颅内段10) 视功能检查视野用直径为3mm的白色视标,检查周边视野正常:颞侧90°,鼻侧60°,上方55°,下方70°用蓝、红、绿色视标检查,周边视野依次递减10°左右立体视觉立体视敏度<60弧秒对比敏感度函数曲线呈倒“U”型,也称为山型或钟型泪液检查泪膜厚度7um,总量7.4ul,更新速度12%~16%min,PH6.5~ 7.6,渗压296~308mOsm/L泪膜破裂时间10~45s;<10s为泪膜不稳定Schirmer试验正常值10~45mm/5min;<10mm/5min为低分泌, <5mm/5min为干眼眼压和青光眼的有关数据平均值10~21mmHg;病理值>21mmHg双眼差异不应大于5mmHg24h波动范围不应大于8mmHg房水流畅系数(C) 正常值0.19~0.65ul/(min2mmHg)病理值<0.12ul/(min2mmHg)房水流量(F) 正常值1.84±0.05ul/min,>4.5ul/min为分泌过高压畅比(P/C) 正常值≤100病理值≥120巩膜硬度(E) 正常值0.0215C/D比值正常<0.3,两眼相差<0.2,>0.6为异常饮水试验饮水前后相差正常值<5mmHg病理值>8mmHg暗室试验试验前后眼压相差正常值<5mmHg病理值>8mmHg暗室加俯卧试验试验前后眼压相差正常值≤5mmHg病理值>8mmHg眼底荧光血管造影臂-脉络膜循环时间平均8.4s臂-视网膜循环时间为7~12s附錄眼科檢查的正常值解剖生理部分眼球前後徑24mm,垂直徑23mm,水準徑23 5mm眼內軸長(角膜內面~視網膜內面)22 12mm,容積6 5ml,重量7g突出度12~14mm,兩眼相差不超過2mm。
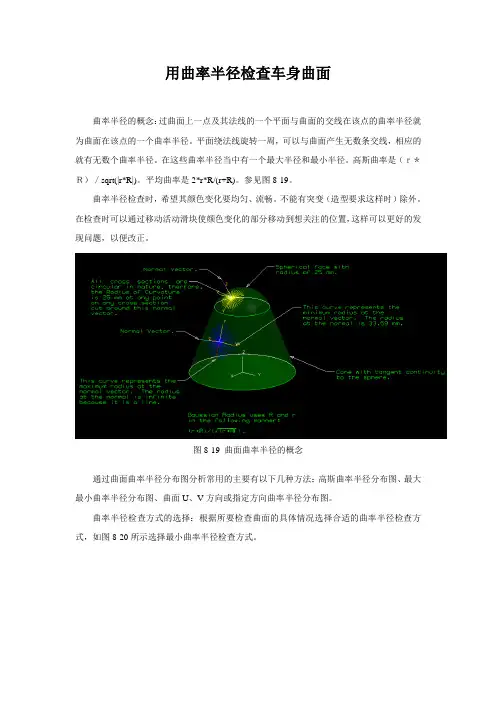
用曲率半径检查车身曲面曲率半径的概念:过曲面上一点及其法线的一个平面与曲面的交线在该点的曲率半径就为曲面在该点的一个曲率半径。
平面绕法线旋转一周,可以与曲面产生无数条交线,相应的就有无数个曲率半径。
在这些曲率半径当中有一个最大半径和最小半径。
高斯曲率是(r*R)/sqrt(|r*R|)。
平均曲率是2*r*R/(r+R)。
参见图8-19。
曲率半径检查时,希望其颜色变化要均匀、流畅。
不能有突变(造型要求这样时)除外。
在检查时可以通过移动活动滑块使颜色变化的部分移动到想关注的位置,这样可以更好的发现问题,以便改正。
图8-19 曲面曲率半径的概念通过曲面曲率半径分布图分析常用的主要有以下几种方法:高斯曲率半径分布图、最大最小曲率半径分布图、曲面U、V方向或指定方向曲率半径分布图。
曲率半径检查方式的选择:根据所要检查曲面的具体情况选择合适的曲率半径检查方式,如图8-20所示选择最小曲率半径检查方式。
图8-20 最小曲率半径分布图如果选择最大曲率半径分析如图8-21所示,因为下面的最大曲率半径在下部的圆台上是无穷大,上部分球面的半径是一个定值,所以用最大曲率半径检查时,上面的颜色一样,而下面的颜色又是另一个样,导致我们没有办法评价曲面的质量。
图8-21 最大曲率半径分布图以下主要结合实例来介绍各种曲面曲率半径分布图分析的各种方法:1)在对曲面整体光顺行进行分析时,一般使用曲面高斯曲率半径分布图分析,如图8-22所示:图8-22 某车型翼子板高斯曲率半径分布图2)在对几个最大曲率半径变化均匀的曲面进行分析时,一般使用最大曲率半径分布图检查。
如图8-23所示:图8-23 最大曲率半径分布图3)在对几个最小曲率半径变化均匀的曲面进行分析时,一般使用最小曲率半径分布图检查。
如图8-24所示:图8-24 最小曲率半径分布图4)经常用到的还有曲面U、V方向曲率半径分布图分析曲面的质量,如图8-25所示:图8-25 曲面U方向曲率半径分布图。
实验十用牛顿环测透镜的曲率半径利用透明薄膜上下表面对入射光的依次反射,入射光的振幅将分解成有一定光程差的几部分。
若两束反射光在相遇时的光程差取决于产生反射光的薄膜厚度,则同一干涉条纹所对应的薄膜厚度相同。
这就是所谓的等厚干涉。
牛顿为了研究薄膜颜色,曾经用凸透镜放在平面玻璃上的方法做实验。
他仔细观察了白光在空气薄层上干涉时所产生的彩色条纹,从而首次认识了颜色和空气层厚度之间的关系。
1675年,他在给皇家学会的论文里记述了这个被后人称为牛顿环的实验,但是牛顿在用光是微粒流的理论解释牛顿环时却遇到困难。
19世纪初,托马斯.杨用光的干涉原理解释了牛顿环。
一、实验目的1、观察牛顿环产生的等厚干涉现象,加深对等厚干涉原理的理解。
2、掌握用牛顿环测量透镜曲率半径的方法。
二、实验仪器牛顿环,钠光灯,测微目镜。
三、实验原理1、牛顿环“牛顿环”是一种用分振幅方法实现的等厚干涉现象,最早为牛顿所发现。
为了研究薄膜的颜色,牛顿曾经仔细研究过凸透镜和平面玻璃组成的实验装置。
他的最有价值的成果是发现通过测量同心圆的半径就可算出凸透镜和平面玻璃板之间对应位置空气层的厚度;对应于亮环的空气层厚度与1、3、5…成比例,对应于暗环的空气层厚度与0、2、4…成比例。
但由于他主张光的微粒说(光的干涉是光的波动性的一种表现)而未能对它作出正确的解释。
直到十九世纪初,托马斯.杨才用光的干涉原理解释了牛顿环现象,并参考牛顿的测量结果计算了不同颜色的光波对应的波长和频率。
牛顿环装置是由一块曲率半径较大的平凸玻璃透镜,将其凸面放在一块光学平板玻璃(平晶)上构成的,如图10.1所示。
平凸透镜的凸面与玻璃平板之间形成一层空气薄膜,其厚度从中心接触点到边缘逐渐增加。
若以平行单色光垂直照射到牛顿环上,则经空气层上、下表面反射的二光束存在光程差,它们在平凸透镜的凸面相遇后,将发生干涉。
其干涉图样是以玻璃接触点为中心的一系列明暗相间的同心圆环(如图10.3所示),称为牛顿环。
河 北 水 利 电 力 学 院 学 报JournalofHebeiUniversityof WaterResourcesandElectricEngineering2021 年3 月第31卷第1期Mar2021Vol31 No1文章编号:2096 — 5680(2021)01 — 0075 — 06用张量分析方法推导含偶应力弹性力学有限元理论孙晓勇1 2 ,宋兴海2,侯娜娜12,付建航2,刘立悦1,2(1.河北省数据中心相变热管理技术创新中心,河北省沧州市重庆路1号061001;2.河北水利电力学院土木工程学院,河北省沧州市重庆路1号061001)摘要:经典弹性力学理论用位移梯度表示无限小变形,不考虑旋转变形,把微元体的旋转视为刚体旋转。
含偶应力弹性力学理论将旋转变形以旋转张量表示,微元体旋转和微元体平动位移同量级,而旋转张量和应变张量同量级,旋转张量与旋转矢量一一对应,用旋转矢量的梯度表示旋转变形。
含偶应力弹性力学理论本构关系包括应力-应变关系和偶应力-曲率张量关 系,用等参变换方法离散单元位移到节点上,从虚功原理出发,增加罚函数项以降低有限元方程对高阶单元的需求,推导了拟 解决三维及二维问题的含偶应力弹性线力学有限元理论,可得三维及二维问题中位移、应力、应变等分布情况,对结构进行力 学评价。
关键词:偶应力;旋转变形;旋转张量;张量分析中图分类号:O343文献标识码:A DOI : 10. 16046/j. cnki. issn2096-5680. 2021. 01. 0151经典线弹性理论与考虑偶应力线弹 性理论在经典弹塑性力学理论中,物体内任意一点的 应力状态只和应变或应变的历史有关,其基本变量为位移,对位移求梯度得到应变张量,用位移梯度描述无限小的变形,然后再由一点的应变张量分析得 到应力张量[1]。
含偶应力的线弹性力学理论认为, 物体内任意一点的微元体,除有各个方向的位移外,还有本身的旋转变形,而这种旋转变形并非单纯的 以旋转角表达,而是用和应变张量一个量级的旋转张量来表示[]。
-第1 章 绪论一、是非判断题1-1 材料力学是研究构件承载能力的一门学科。
〔 √ 〕 1-2 材料力学的任务是尽可能使构件平安地工作。
〔 × 〕 1-3 材料力学主要研究弹性围的小变形情况。
〔 √ 〕1-4 因为构件是变形固体,在研究构件的平衡时,应按变形后的尺寸进展计算。
〔×〕 1-5 外力就是构件所承受的载荷。
〔 × 〕1-6 材料力学研究的力是构件各局部间的相互作用力。
〔 × 〕1-7 用截面法求力时,可以保存截开后构件的任一局部进展平衡计算。
〔 √ 〕 1-8 压强是构件外表的正应力。
〔 × 〕 1-9 应力是横截面上的平均力。
〔 × 〕1-10 材料力学只研究因构件变形引起的位移。
〔 √ 〕 1-11 线应变是构件中单位长度的变形量。
〔 × 〕 1-12 构件一点处各方向线应变均相等。
〔 × 〕1-13 切应变是变形后构件中任意两根微线段夹角的变化量。
〔 × 〕 1-14 材料力学只限于研究等截面直杆。
〔 × 〕1-15 杆件的根本变形只是拉〔压〕、剪、扭和弯四种。
如果还有另一种变形,必定是这四种变形的*种组合。
〔 √ 〕第 2 章 轴向拉伸与压缩 一、是非判断题2-1 使杆件产生轴向拉压变形的外力必须是一对沿杆轴线的集中力。
〔×〕 2-2 拉杆伸长后,横向会缩短,这是因为杆有横向应力存在。
〔×〕 2-3 虎克定律适用于弹性变形围。
〔×〕 2-4 材料的延伸率与试件尺寸有关。
〔√〕2-5 只有超静定构造才可能有装配应力和温度应力。
〔√〕 二、填空题2-6 承受轴向拉压的杆件,只有在〔加力端一定距离外〕长度围变形才是均匀的。
2-7 根据强度条件][σσ≤可以进展〔强度校核、设计截面、确定许可载荷〕三方面的强度计算。
2-8 低碳钢材料由于冷作硬化,会使〔比例极限〕提高,而使〔塑性〕降低。
G0-位置连续,G1-切线连续,G2-曲率连续,G3-曲率变化率连续,G4-曲率变化率的变化率连续: j: C) e: h) c: m. t这些术语用来描述曲面的连续性。
曲面连续性可以理解为相互连接的曲面之间过渡的光滑程度。
提高连续性级别可以使表面看起来更加光滑、流畅。
G0-位置连续! W7 ~6 E! { O8 k5 p图中所示的两组线都是位置连续,他们只是端点重合,而连接处的切线方向和曲率均不一致。
这种连续性的表面看起来会有一个很尖锐的接缝,属于连续性中级别最低的一种。
$ [+ V5 q# X6 m O( J( S+ x8 {2 HG1-切线连续[2 B# O; e& R( B( R( s |1 G- j图中所示的两组曲线属于切线连续,他们不仅在连接处端点重合,而且切线方向一致(可以看到相连的两条线段梳子图的刺在接触点位置是在一条直线上的)。
用过其他PC插图软件的用户,比如CorelDraw,实际上通常得到的都是这种连续性的曲线。
* m" b' d! Q* G这种连续性的表面不会有尖锐的连接接缝,但是由于两种表面在连接处曲率突变,所以在视觉效果上仍然会有很明显的差异。
会有一种表面中断的感觉。
0 O" \9 o3 Y; u1 G" N8 W! p通常用倒角工具生成的过渡面都属于这种连续级别。
因为这些工具通常使用圆周与两个表面切点间的一部分作为倒角面的轮廓线,圆的曲率是固定的,所以结果会产生一个G1连续的表面。
如果想生成更高质量的过渡面,还是要自己动手。
$ r9 [* h) V. nG2-曲率连续图中的两组曲线属于曲率线续。
顾名思义,他们不但符和上述两种连续性的特征,而且在接点处的曲率也是相同的。
如图中所示,两条曲线相交处的梳子图的刺常度和方向都是一致的(可以为0)。
) b* D# C1 F# E0 x这种连续性的曲面没有尖锐接缝,也没有曲率的突变,视觉效果光滑流畅,没有突然中断的感觉(可以用斑马线测试)。