激光跟踪仪在测量工件尺寸及形位误差上的应用
- 格式:doc
- 大小:429.00 KB
- 文档页数:4
激光跟踪仪测量精度的控制正确的操作是提高测量质量的必要条件,通过使用仪器在极高测量精度上总结了以下几方面:1.测量环境由于我们机械设备安装的现场各种工种交叉作业,现场施工的环境复杂,因此要做到以下几点:一定要考虑到仪器测量控制网中转站点的稳定以及测站的稳定性,并在长时间的测量中定时检测转站点,测量时应避免附近大型物件的吊装,因为重物有可能使地基发生不可察觉的沉降影响我们的测量精度;应正确使用气象传感器,我们在现场施工应注意温度控制,这也在施测过程也表现的很明显,温度不仅对测量精度有特别的影响,温度变化不仅会引起测量状态发生变化更糟糕的是这些测量结果很难量化改正,因此要严格控制测量时的温度。
2.仪器正确使用在使用仪器时应提前预热,并在预热完成后对仪器进行现场检查,在检查中我们不仅可以确定仪器的测量状态,而且可能发现测量环境的问题;对于ADM和IFM的选择我们应了解其功能,ADM提供了无需返回的方便,大大提高了测量的速度,但是精度较低于IFM,所以当测量环境较好、不易断光时应尽量选用IFM;对于靶球及其附件的选择上我们应了解其对应不同的常数以及做好相应的保护,还有就是应保持靶球及其附件的清洁。
操作人员测量时应掌握好靶球到仪器的俯仰角,持靶标测量时,靶标的运行速度和加速度会对测量精度产生影响,速度过快会使光束折断,还有就是靶球操作人员和控制人员配合不协调导致测量误差产生,因此提高操作人员的操作熟练度是减少人为测量误差的有效措施;在测量过程中应保持多余观测,因为只有存在多余观测才可能剔除粗差及受环境影响较大的数据。
GTS激光跟踪仪系统由PC、控制主机、跟踪站、目标镜等组成。
跟踪站可以检测目标镜在空间的运动方向和大小并将这一信息发送给控制主机,在控制主机的控制下跟踪站作出响应,使激光束始终沿着目标镜的中心入射。
无论目标镜走到哪里,系统都能对其进行跟踪。
水平和垂直向的角度测量与距离测量结合在一起,构成一个球坐标的测量体系,目标镜的3D坐标便唯一确定,也即通过目标镜完成空间几何元素测点信息的获取,并通过先进的三维数据处理软件和三维测量软件完成对空间几何元素尺寸、尺寸公差与形位公差、空间曲面与曲线的分析计算工作。
分时多站式激光跟踪仪测量系统课程名称:光机电一体化院系:机械工程学院班级:硕3002班*名:**学号: **********目录1 激光跟踪仪系统 (1)1.1 激光跟踪仪系统的概述 (1)1.2 激光跟踪仪系统的基本原理 (1)1.2.1 系统的组成 (2)1.2.2 激光跟踪仪系统的原理 (3)2 分时多站式激光跟踪仪测量系统 (7)2.1 引言 (7)2.2 基于GPS多边形定位原理 (7)2.3 分时测量的算法 (9)2.3.1 激光跟踪仪基站的自标定 (9)2.3.2 测量点坐标的标定 (10)1 激光跟踪仪系统1.1激光跟踪仪系统的概述激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。
它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。
它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量,测量静止目标,跟踪和测量移动目标或它们的组合。
SMART310是Leica公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310的第二代产品,其后,Leica公司还推出了LT/LTD系列的激光跟踪仪,以满足不同的工业生产需要。
LTD系列的激光跟踪仪采用了Leica公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz 下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模块和数字摄影测量模块等。
激光跟踪系统在我国的应用始于1996年,上飞、沈飞集团在我国第一次引进了SMART310激光跟踪系统;2005年上海盾构公司引进了Leica公司的一套LTD600跟踪测量系统,应用于三维管模的检测。
(a)API的激光跟踪仪(b) Leica的激光跟踪仪(c)Faro的激光跟踪仪图1-1 API等公司生产的激光跟踪仪1.2激光跟踪仪系统的基本原理近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。
1.2 三维激光跟踪测量系统组成激光跟踪仪的主要由传感器、控制箱、伺服电机、气象站及操控终端组成,主要依靠内部的用于测距的激光干涉计和自动跟踪测角的码盘进行测量。
跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪的三个轴,三轴相交的中心是仪器坐标系的原点。
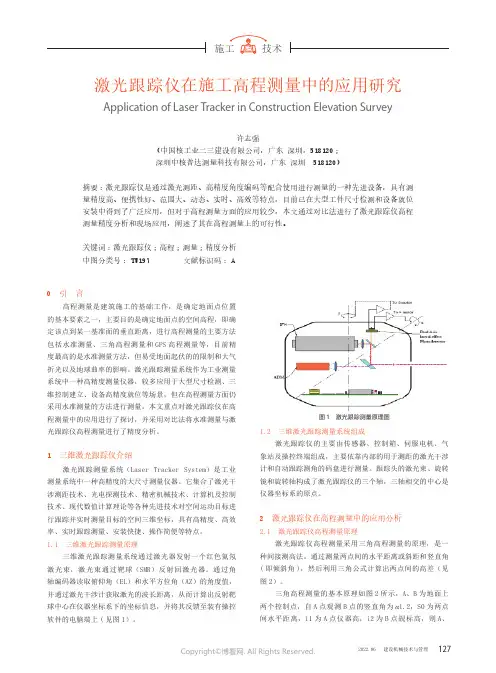
2 激光跟踪仪在高程测量中的应用分析2.1 激光跟踪仪高程测量原理激光跟踪仪高程测量采用三角高程测量的原理,是一种间接测高法。
通过测量两点间的水平距离或斜距和竖直角(即倾斜角),然后利用三角公式计算出两点间的高差(见图2)。
三角高程测量的基本原理如图2所示,A、B 为地面上两个控制点,自A 点观测B 点的竖直角为α1.2,S0为两点间水平距离,i1为A 点仪器高,i2为B 点觇标高,则A、激光跟踪仪在施工高程测量中的应用研究Application of Laser Tracker in Construction Elevation Survey许志强(中国核工业二三建设有限公司,广东 深圳,518120;深圳中核普达测量科技有限公司,广东 深圳 518120)摘要:激光跟踪仪是通过激光测距、高精度角度编码等配合使用进行测量的一种先进设备,具有测量精度高、便携性好、范围大、动态、实时、高效等特点,目前已在大型工件尺寸检测和设备就位安装中得到了广泛应用,但对于高程测量方面的应用较少,本文通过对比法进行了激光跟踪仪高程测量精度分析和现场应用,阐述了其在高程测量上的可行性。
关键词:激光跟踪仪;高程;测量;精度分析中图分类号: TU197 文献标识码: A0 引 言高程测量是建筑施工的基础工作,是确定地面点位置的基本要素之一,主要目的是确定地面点的空间高程,即确定该点到某一基准面的垂直距离,进行高程测量的主要方法包括水准测量、三角高程测量和GPS 高程测量等,目前精度最高的是水准测量方法,但易受地面起伏的的限制和大气折光以及地球曲率的影响。
激光跟踪测量系统作为工业测量系统中一种高精度测量仪器,较多应用于大型尺寸检测、三维控制建立、设备高精度就位等场景,但在高程测量方面仍采用水准测量的方法进行测量。
激光跟踪仪现场测量的不确定度研究的开题报告标题:激光跟踪仪现场测量的不确定度研究一、研究背景激光跟踪仪广泛应用于现场测量,比如航空、轨道、机械加工等领域。
然而,在实际应用中,激光跟踪仪的测量结果往往存在一定的误差,主要原因在于测量仪器和环境的复杂性以及操作者的技术水平。
因此,对于激光跟踪仪的测量不确定度进行深入研究,有助于提高测量结果的可信度和精度。
二、研究内容本研究旨在对激光跟踪仪的现场测量不确定度进行研究,具体内容包括以下几个方面:1.激光跟踪仪原理及操作方法介绍激光跟踪仪的原理和操作方法,包括激光发射、反射、接收和处理等环节。
2.不确定度理论基础介绍不确定度的基本概念和数学处理方法,确定误差来源。
3.测量误差来源分析分析激光跟踪仪在现场测量时可能存在的误差来源,如环境因素、操作者技术水平、测量仪器精度等。
4.测量不确定度计算方法提出针对激光跟踪仪的现场测量不确定度计算方法,包括直接法、传递法和合成法等,以确定测量结果的可信度和精度。
5.实验验证通过实验验证不确定度计算方法的有效性和可行性,比对不同方法的差异和适用范围。
三、研究意义1.提高激光跟踪仪的测量结果的可信度和精度。
2.为工业界、科研机构提供重要技术支持和指导。
3.完善激光测量相关标准和法规,促进测量领域的规范化和标准化。
四、研究方法本研究采用文献调研和实验验证相结合的方法,结合不确定度计算方法的理论基础和激光跟踪仪的实际操作,进行测量不确定度分析及验证。
同时,在实验过程中对不同计算方法进行比较分析,确定最优方法。
五、预期结果1.提出适用于激光跟踪仪的现场测量不确定度计算方法。
2.验证不确定度计算方法的有效性和可行性。
3.总结不同计算方法的优缺点,确定最优方法。
六、研究工作计划1.2021年9月-2021年10月:调研相关文献,并进行初步实验。
2.2021年11月-2022年1月:收集实验数据,进行数据处理和分析。
3.2022年2月-2022年3月:确定最优不确定度计算方法。
激光跟踪仪应用场景激光跟踪仪是一种利用激光技术来实现精确跟踪和定位的设备,广泛应用于各个领域。
它的主要原理是利用激光束对目标进行扫描和测量,通过接收反射回来的激光信号来确定目标的位置和运动状态。
激光跟踪仪具有高精度、高速度、非接触性等特点,因此被广泛应用于航天、军事、工业制造、医疗和娱乐等领域。
在航天领域,激光跟踪仪被用于对航天器进行定位和测量。
通过激光束的扫描和测量,可以准确确定航天器的位置和运动轨迹,为航天任务的实施提供重要的参考数据。
例如,在卫星发射过程中,激光跟踪仪可以实时监测卫星的位置和姿态,确保卫星按照预定的轨道正确发射。
此外,激光跟踪仪还可以用于对航天器的姿态控制和空间导航,提高航天器的定位精度和导航能力。
在军事领域,激光跟踪仪被广泛应用于目标跟踪和导航。
通过激光束的扫描和测量,可以实时跟踪和定位目标,为军事作战提供重要的支持。
例如,在导弹系统中,激光跟踪仪可以实时锁定目标,提供导弹的引导和控制信号,确保导弹精确命中目标。
此外,激光跟踪仪还可以用于无人机的导航和自动驾驶,提高无人机的飞行精度和自主能力。
在工业制造领域,激光跟踪仪被用于精确测量和定位。
通过激光束的扫描和测量,可以实时测量和定位工件,提高生产线的精度和效率。
例如,在汽车制造中,激光跟踪仪可以用于汽车零件的测量和定位,确保零件的尺寸和位置符合要求。
此外,激光跟踪仪还可以用于机械加工和装配过程中的定位和校准,提高产品的质量和可靠性。
在医疗领域,激光跟踪仪被用于手术导航和疾病诊断。
通过激光束的扫描和测量,可以实时跟踪和定位手术器械和病灶,提高手术的精确性和安全性。
例如,在脑部手术中,激光跟踪仪可以实时监测手术器械的位置和姿态,帮助医生准确定位和操作。
此外,激光跟踪仪还可以用于疾病的诊断和治疗,通过激光束的扫描和测量,可以定位和定量分析病灶,为疾病的早期发现和治疗提供重要的依据。
在娱乐领域,激光跟踪仪被用于虚拟现实和增强现实技术。
激光跟踪仪在测量工件尺寸及形位误差上的应用文章通过对TrackerCal 4型激光跟踪仪的基本结构和工作原理的简单介绍,结合其对工件尺寸及形位误差的测量方法、测量结果分析以及误差补偿分析,从而掌握了激光跟踪仪在测量中的使用技巧,进而达到提高测量效率和测量精度的目的。
标签:激光跟踪仪;形位误差;尺寸;误差补偿引言目前我国机械加工单位用来检测工件尺寸及形位误差的工具大都还是使用千分尺,游标卡尺等配合使用数控机床打表的传统方法来测量。
传统方法虽然也能很好的检测工件误差精度,但有很多检测问题是用传统方法解决不了的,且费时费力,效率低下。
随着对工件加工精度要求的提高,传统的检测方法在提高检测精度上有一定的局限性,因此使用激光跟踪仪检测工件不仅可以提高测量精度而且简便快捷,大大的节省了人力物力。
1 基本结构和工作原理TrackerCal 4型激光跟踪仪由Radian 跟踪头和控制箱、5米接线电缆、气象站(含1根1.5米连接线、1个空气温度传感器、1个材料温度传感器、一个大气压力传感器)、连接网线、SMR-1.5英寸直径空心靶球、电缆包、防尘盖、校准三脚架、系统软件等构成。
激光跟踪仪是在激光干涉仪的基础上结合先进的伺服控制技术得到目标点相对于跟踪头的位置,工作基本原理是在工件被测位置上放置靶球(充当反射器),跟踪头发射出来的激光射到靶球上,并返回到跟踪头,当靶球移动时,跟踪头实时的转动来对准目标,与此同时,返回光束被检测系统所接收,以此来测算目标的空间位置。
注:1-跟踪头和控制箱;2-连接网线;3-电源线;4-5米接线电缆;5-电缆包;6-SMR-1.5英寸直径空心靶球;7-靶球清洁套装;8-气象站;9-防尘盖。
图12 工件尺寸的测量以测量加工孔的直径为例:(1)首先把激光跟踪仪各部件连接起来布置好位置,摆放位置必须保证被测加工孔能够接收跟踪头发出的光束且光束不中断。
如图2所示。
(2)打开控制器上的电源开关,对激光跟踪仪进行预热,预热时间大约半个小时。
用宏程序S UB9010、S UB9011和建立演算子程序。
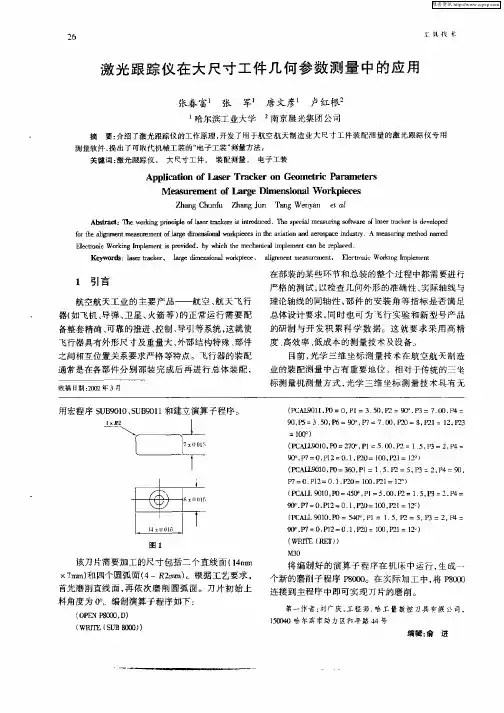
图1该刀片需要加工的尺寸包括二个直线面(14mm ×7mm )和四个圆弧面(4-R 2mm )。
根据工艺要求,首先磨削直线面,再依次磨削圆弧面。
刀片初始上料角度为0°。
编制演算子程序如下: (OPE N P8000,D )(WRITE (S UB 8000))(PC A L9011,P0=0,P1=3.50,P2=90°,P3=7.00,P4=90,P5=3.50,P6=90°,P7=7.00,P20=8,P21=12,P23=100°)(PC A LL9010,P0=270°,P1=5.00,P2=1.5,P3=2,P4=90°,P7=0,P12=0.1,P20=100,P21=12°)(PC A LL9010,P0=360,P1=1.5,P2=5,P3=2,P4=90,P7=0,P12=0.1,P20=100,P21=12°)(PC A LL 9010,P0=450°,P1=5.00,P2=1.5,P3=2,P4=90°,P7=0,P12=0.1,P20=100,P21=12°)(PC A LL 9010,P0=540°,P1=1.5,P2=5,P3=2,P4=90°,P7=0,P12=0.1,P20=100,P21=12°)(WRITE (RET ))M30将编制好的演算子程序在机床中运行,生成一个新的磨削子程序P8000。
在实际加工中,将P8000连接到主程序中即可实现刀片的磨削。
第一作者:刘广庆,工程师,哈工量数控刀具有限公司,150040哈尔滨市动力区和平路44号编辑:俞 进收稿日期:2002年3月激光跟踪仪在大尺寸工件几何参数测量中的应用张春富1 张 军1 唐文彦1 卢红根2 1哈尔滨工业大学 2南京晨光集团公司摘 要:介绍了激光跟踪仪的工作原理,开发了用于航空航天制造业大尺寸工件装配测量的激光跟踪仪专用测量软件,提出了可取代机械工装的“电子工装”测量方法。
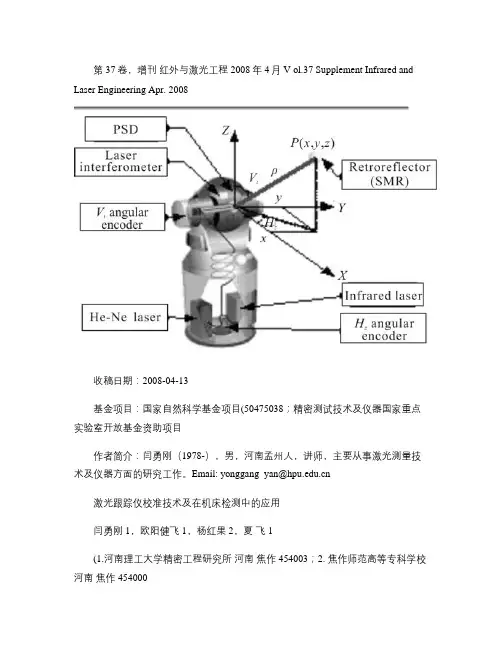
第37卷,增刊红外与激光工程 2008年4月 V ol.37 Supplement Infrared and Laser Engineering Apr. 2008收稿日期:2008-04-13基金项目:国家自然科学基金项目(50475038;精密测试技术及仪器国家重点实验室开放基金资助项目作者简介:闫勇刚(1978-),男,河南孟州人,讲师,主要从事激光测量技术及仪器方面的研究工作。
Email: yonggang_yan@激光跟踪仪校准技术及在机床检测中的应用闫勇刚1,欧阳健飞 1,杨红果2,夏飞1(1.河南理工大学精密工程研究所河南焦作 454003;2. 焦作师范高等专科学校河南焦作 454000摘要:讨论了激光跟踪仪的校准技术,分析了测量误差来源及误差对跟踪仪产生的影响,并利用三坐标测量机对激光跟踪仪进行了校准。
结合生产需要,利用激光跟踪仪高效地对大型机床进行检测,制定了激光跟踪仪检测大型机床的方法。
结果显示,利用激光跟踪仪能够精确地、高效地对机床进行检测,并指导工人对机床进行维护和调整。
研究结果表明,激光跟踪仪不仅能对现场的机床进行精度检测,而且能对不易搬动的零部件、生产线以及夹具等进行测量。
关键词:校准;激光跟踪仪;误差来源;机床检测中图分类号:V556.7 文献标识码:A 文章编号:1007-2276(2008增(几何量-0158-04Calibration of laser tracker and its application in detection ofmachining toolYAN Yong-gang1, OUYANG Jian-fei1, YANG Hongguo 2, XIA Fei 1(1. Precision Engineering Institute, Henan Polytechnic University, Jiaozuo 454003, China; 2. Jiaozuo Teachers College, Jiaozuo 454000,ChinaAbstract: Calibration method for laser tracker was discussed and error sources were anlyzed. Calibration was carried on by use of CMM. Laser tracker was used to detect large-scale machining tool. Then the measuring method was described detailedly. The result shows the machining tool can be checked precisely and high effiently by laser tracker. The paper also shows both the machining tools and other large-scale objects, such as assembly line and jig, can be measured by laser tracker.Key words: Calibration; Laser tacker; Error sources; Machining tool detection0 引言激光跟踪仪具有测量范围大,精度高,现场测量等优点,已被广泛应用于机械制造、航空航天、汽车、造船、工业机器人定位等精密工业领域[1,2],因此定期检测系统精度,确保激光跟踪仪现场使用中技术性能稳定可靠,与被检测对象的质量及安全性能密切相关。
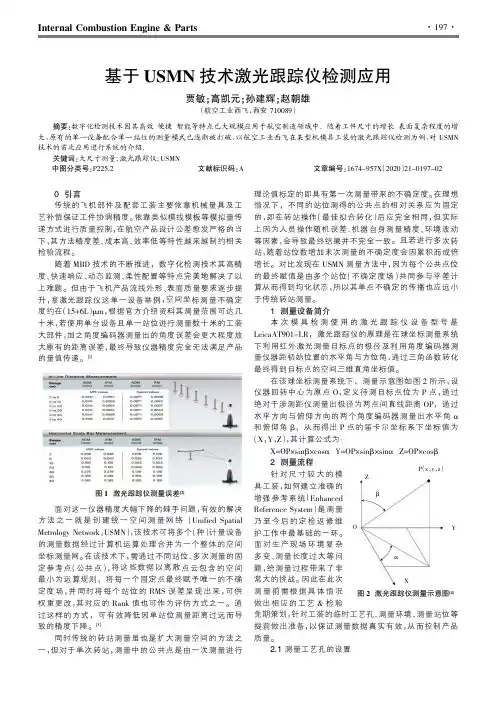
面对这一仪器精度大幅下降的棘手问题,有效的解决方法之一就是创建统一空间测量网络(Unified Spatial Metrology Network ,USMN ),该技术可将多个(种)计量设备的测量数据经过计算机运算处理合并为一个整体的空间坐标测量网。
在该技术下,需通过不同站位、多次测量的固定参考点(公共点),将这些数据以离散点云包含的空间最小为运算规则,将每一个固定点最终赋予唯一的不确定度场,并同时将每个站位的RMS 误差呈现出来,可供权重更改,其对应的Rank 值也可作为评估方式之一。
通过这样的方式,可有效降低因单站位测量距离过远而导致的精度下降。
[3]同时传统的转站测量虽也是扩大测量空间的方法之一,但对于单次转站,测量中的公共点是由一次测量进行Y=OP×sinβ×sinαZ=OP×cosβ针对工装的临时工艺孔、测量环境、测量站位等以保证测量数据真实有效,从而控制产品图1激光跟踪仪测量误差[2]图2激光跟踪仪测量示意图[4]ZβαO YX P (x ,y ,z )传统小件模胎工装仅需3个TB孔供三坐标测量机计量使用,针对本次特殊情况,采用在原有端头3个TB 孔基础上添加额外3个TB孔使得工装测量系统完整包在此基础上再添加30个临时ERP孔作为USMN时的公共点使用,原则上等距分布。
站位规划考虑激光跟踪仪在尽可能保证精度的条件下合理使个站位进行测量,每个站位将合理范围内且视线无干涉点位全部采集,同时将标尺校验并未实现数据融合。
而通过USMN操作,可以讲所有站位下的点位通过公共点建立联系,从而将所有站位下的测量数据按照算法统一在任一站位下或指定世界坐标系下,以便更加方便的进行后续的测量分析及数据处理,本次测量数据将全部统一到第一个站位(测量坐标系)下。
(图4)将设备的各个站位先通过最佳拟合转化进行相互定优化。
接下来的结论窗口主要两项参数判定状态:本次测量的最大Ranking值为:126.9075%,来源于:P28;Max Error值为:0.0258,来源于:P35,达到预期单设备有效精度预估。
激光跟踪仪的使用方法及精度评定激光跟踪仪是一种用于测量物体运动的高精度设备。
它利用激光束对目标进行跟踪和测量,可以广泛应用于工业、医疗、科研等领域。
本文将介绍激光跟踪仪的使用方法及精度评定。
一、激光跟踪仪的使用方法1. 设置仪器:首先,将激光跟踪仪安装在稳固的支架上,并调整好仪器的角度和高度,以确保激光束能够准确照射到目标上。
2. 校准仪器:使用仪器自带的校准装置对激光跟踪仪进行校准,以保证测量结果的准确性。
3. 瞄准目标:将激光束对准需要跟踪的目标,确保激光束能够准确照射到目标上,并调整仪器的焦距,以获得清晰的图像。
4. 开始测量:启动激光跟踪仪,并开始对目标进行跟踪和测量。
仪器会记录下目标的运动轨迹和相关数据。
5. 数据处理与分析:将测量得到的数据导入计算机,利用专业的软件对数据进行处理和分析,得出目标的运动参数和轨迹。
二、激光跟踪仪的精度评定1. 测量精度:激光跟踪仪的测量精度是评估其性能的重要指标。
一般来说,测量精度是指测量结果与真实值之间的偏差。
通过与其他高精度设备的对比测量,可以评定激光跟踪仪的测量精度。
2. 稳定性:激光跟踪仪的稳定性是指在长时间测量过程中,仪器的测量结果是否稳定不变。
通过连续测量同一目标的运动轨迹,并分析测量结果的稳定性,可以评定激光跟踪仪的稳定性。
3. 重复性:激光跟踪仪的重复性是指在多次测量同一目标时,测量结果的一致性程度。
通过多次测量同一目标,对比测量结果的差异,可以评定激光跟踪仪的重复性。
4. 环境适应性:激光跟踪仪在不同环境条件下的测量性能也需要评定。
例如,在强光干扰下或者震动环境下的测量精度是否受到影响等。
激光跟踪仪的使用方法包括设置仪器、校准仪器、瞄准目标、开始测量和数据处理与分析。
而其精度评定则包括测量精度、稳定性、重复性和环境适应性等方面的考量。
通过合理使用和评估激光跟踪仪的性能,可以提高测量的准确性和稳定性,确保其在各个领域的应用效果。
激光跟踪仪在飞机装配及工装测量中的应用摘要:随着科技的进步和社会的发展,激光跟踪仪逐渐被应用在各个领域,其中在飞机装配以及工装测量方面的应用更是促进了我国航天事业的发展,基于此,本文通过对激光跟踪仪测量技术以及在飞机设备安装方面的相关阐述,探讨了激光跟踪仪在工装测量精度的控制。
关键字:激光跟踪仪飞机装配工装测量应用1、引言随着社会的发展和科技的进步,越来越多的企业加强对作业安全、设备安全等方面的重视并更加注重对新科技的使用。
而作为一种新型的、高精度的、便携式的三坐标测量设备,激光跟踪仪以其独特的优势被应用在飞机装配以及工装测量之中,从而有效的缩短了设备的安装实际并在一定程度上提升了工装设备的测量精度。
2、激光跟踪仪的测量技术2.1、激光跟踪仪的工作原理激光跟踪器系统的两个角度编码器自动测量目标相对于跟踪器的水平和垂直位置;通过激光干涉测量法测量目标与激光跟踪器之间的距离,并将信息通过传感器传输到激光跟踪器的控制电缆上,然后通过激光跟踪器测量目标与激光跟踪器之间的距离进行分类计算。
部分信息通过电机电缆反馈给激光跟踪器的伺服马,部分信息通过局域网传输到应用处理器并存储在数据库中。
由跟踪器获得的测量数据定义了一个完整的球坐标系统原点是跟踪的中心镜子。
依据对于三角函数公式,球面坐标系中的坐标值可以转换为笛卡尔坐标系中的坐标值系统坐标系的原点仍在万向节的中心,称为参考坐标系或局部坐标系系统参考坐标系也是开始一个新部门。
2.2、激光跟踪仪测量技术特点激光跟踪器的水平旋转角度为640度,垂直旋转角度为80度至-60度度。
这个激光跟踪器可在-10℃~-40℃的温度范围内工作,测量直径可达120米,测距精度和ADM分辨率为0.1μm,测量精度为15米(以内)10米)和1.5微米(10米以内),完全能满足飞机设备安装的需要。
3、在飞机设备安装中的应用3.1、仪器测量控制网的布设对激光跟踪器,单点的测量范围不能满足我们的测量要求要求。
激光跟踪仪应用功能提升分析摘要:在精密测量领域中,激光跟踪仪设备的应用优势极强,不仅可以满足大尺寸三维化的测量影响,还能够实现对运动测量目标的跟踪和检测,在航空航天、医疗机械等领域中有十分重要的应用。
在提升激光跟踪仪设备的应用功能过程中,可辅助使用测量笔来减少测量过程中的位置偏差和角度偏差,这对进一步优化激光跟踪仪应用与测量等具有重要参考意义。
在此背景下,本文通过分析激光跟踪仪的基本结构和应用原理,对表面刻线检测进行详细分析,探讨其应用功能提升。
关键词:激光跟踪仪;应用功能提升;分析引言:随着激光测量技术的快速发展,在许多装配与检测等工作中有了更加广泛的应用,有效突破了在零件生产中二维图纸和三维实际间的误差。
在航空装配工程中,激光跟踪仪设备凭借灵活高效的优势发挥了重要作用,包括检测、校准等工作中都需要使用激光跟踪仪设备来辅助。
在航空装配夹具的定位调装工作中,技术人员需在目标件上打出定位孔,并将靶球座零件置入其中,但由于曲面变化的影响,在测量应用中的精准度不足,需要做好激光跟踪仪的应用功能提升与优化。
一、激光跟踪仪的结构与原理概述(一)基本结构激光跟踪仪系统包括PC微机、控制主机、跟踪站和目标镜等,在实际监测过程中,跟踪站会收集和检测目标镜的实际运动情况,采集方向、坐标等信息传输给控制主机,并按照其发出的操作指令实现跟踪站的响应,确保激光束能够随目标镜同向移动,始终保证从中心位置处入射。
这种动态跟踪与检测的运行方式,使激光跟踪仪设备可以较好地完成检测目标的运动捕捉、跟踪,实际应用优势更加突出。
在激光跟踪仪设备中,使用了球坐标系来进行检测目标的坐标定位,通过水平、垂直和角度等信息的共同确定,更有利于满足在测量过程中对空间曲面的有效分析[1]。
在激光跟踪仪的辅助设备中还包含有反射靶球、靶球座等,在实际测量过程中,技术人员可以使用测量笔来实现辅助应用,通过发射激光至靶球座和靶球中心形成检测光通路,整体结构组成更加简单。
三维激光跟踪检测技术在工业领域的应用身份证号:******************摘要:当前,先进技术不断更新迭代应用于工业中,因此应当重视对技术的掌握以及相关流程的操作,避免检测结果出现错误,影响精度。
本文介绍三维激光跟踪检测技术在工业领域的应用。
关键词:三维;激光跟踪;检测技术;应用引言:由于数字化测量技术的飞速发展,目前数字化测量技术的种类繁多,其中激光跟踪仪测量技术的应用较为广泛,主要应用于飞机、汽车等高精度要求的制造及装配检测的过程中。
激光跟踪仪是一种高精度的测量仪器,能够精确地获取空间点位的信息并对其进行跟踪。
一、激光跟踪仪概述激光跟踪仪是一台以激光为测距手段配以反射标靶的仪器,该设备具有环绕两个轴线旋转的角度装置,构成一个整体的球面坐标测量体系。
可以用来对固定的物体进行测量,对运动的物体进行追踪和测定。
激光跟踪系统采用的是激光测量,因此测量的准确率很高,但是,随着距离的增加,跟踪系统的定位也会出现很大的偏差。
在激光跟踪系统中,目标对跟踪系统的测量准确率也有很大的作用。
一般目标是一个球体,在其内侧有三个相互垂直的镜子。
如果三个镜子的拐角与外侧的圆心不一致或者三个镜子彼此不正交都会造成错误,所以在同一次的测量中建议采用相同的镜子,但镜子不能围绕自己的光轴线旋转。
由于激光自身受大气温度、气压、湿度和气流的影响,因此大气的温度、气压、湿度等因素的补偿对设备的正常工作至关重要[1]。
跟踪系统由测量头、MCU、球面固定反射镜、以及带有CAM2测量软件的控制电脑构成。
通过对SMR运动的探测,把运动的情况反馈到MCU,由MCU对其进行响应,使得激光束总是沿SMR的方向进入。
把测量仪放在适当的地方,这样不管SMR去哪儿,它都能被它追踪。
平面和竖直方向的角和深度的测量,形成了一个球状的测量系统,只有这样,SMR的三维坐标才能被确定,也就是说,利用SMR进行空间几何单元的数据采集,然后利用CAM2进行三维空间的几何形状误差分析和计算。
激光跟踪仪校准技术在机床检测中的应用摘要:我国自上世纪90年代开始大量引进激光跟踪仪,并将应用于生产实践和科研。
激光跟踪仪在航空航天、造船工业、汽车制造、电子工业、逆向工程等行业中,得到了广泛应用。
本文主要讨论激光跟踪仪的校准技术分析测量误差的来源,并且应用激光跟踪仪对机床进行检测。
关键字:激光跟踪仪校准技术机床1.引言高精度加工设备经过一段时间的使用以后,由于使用中的磨损、变形和环境等因素会导致加工设备的加工精度大幅度降低,所生产出来的产品精度也会降低。
随着我国现代制造业的高速发展和加工订单的不断增多,对这些加工设备进行检测的要求也越来越高,而以往的检测手段很难满足现代工业检测的需要。
目前,笛卡尔三坐标测量机及现场测量夹具主要用于测量机床几何精度,而笛卡尔三坐标测量机由于三根导轨和安装环境的限制导致其量程受限,而且测量效率相对比较低,并且只能进行小样本检测,对于高频次的故障容易漏检;特别是不能进行现场测量,无法对生产车间的机床进行有效地精度检测。
因此,如何才能有效、精确的对机床加工设备进行检测已经成为当前必须解决的难题。
激光跟踪测量系统在解决该难题时提供了新的方法。
激光跟踪测量系统是一种新型的三维测量系统目前己被广泛应用于现代工业的检测中。
2.激光跟踪仪校准技术2.1 激光跟踪仪误差分析当对同一量值进行反复多次的测量时,会得到一系列有规律的不同测量值(通常称为测量列),每个测量值都是包含一定的误差,这些误差是随机出现的,即前一个误差与下一个误差之间不存在任何的关系,也就是说不能预测下一个误差的大小和方向。
但是对于误差的总体来说,却具有一定的统计规律性。
随机误差是由很多目前还没有掌握或不便掌握的微小因素所构成。
激光跟踪仪测量装置方面的因素包括零部件配合的不稳定性、零部件的磨损变形等。
环境方面的因素是指温度的波动、湿度和气压变化、灰尘以及地基的不稳等;人员方面的因素是指测量人员在测量和读数时的不稳定。
应用激光跟踪仪的数控机床几何精度检测分析摘要数控机床精密度高,生产速度快等众多优点,受到机械生产行业的青睐,数控机床也在不断的完善和改革中,其中包括对机床零件和组成部分的改进,数控中心软件编程的设计等,但是随着人们对构建精度要求越来越高,数控机床的精度必须不断的提高,这就要求有较好的检测手段对数控机床进行定期的精度检测。
随着人们的创新和改革,数控机床的种类也逐渐增多,精度越来越高,不断满足人们的生产需求,文章对数控机床和机床的精度检测概念进行阐述,并且对基于激光跟踪仪的数控机床精度检测方法进行探讨。
关键词数控机床;激光跟踪仪;几何;精度;检测0 引言数控机床的工作原理是通过控制系统对指定的程序和编码进行识别和翻译,将这些程序和编码用通过数字显示出来,再经过控制装置进行处理,发出各种命令来指导机床进行生产,按照图纸的要求把机械产品加工出来。
数控机床之所以受到人们的青睐,一方面是因为其工作效率高,有较强的智能性,对一些精度较高的构建进行批量的生产和加工,减少人力劳动的投入;另一方面,数控机床的经济性较好,主要体现在投资相对较小,效率高,而且设备便于工作人员进行操作,寿命相对较长。
数控机床在不断为人们生产做出贡献的同时也在不断的被人们所改进和创新,力争使其精度更高,生产的零件和产品能够更好的被人们所使用,而且工作人员也在对数控机床精度检测上不断的加强,利用多种手法检测,激光跟踪技术就是一项很好的检测其几何精度方法。
1 数控机床几何精度检测数控机床的精度检测有很多中如几何精度检测、工作精度检测及传动精度检测等,每一个检测环节对数控机床来说都是必须的,因为这关系到机床自身的精度和实用性,而且机床本身的精度检测液非常重要,包括各个工作部件如刀具、主轴等的磨损状况,文章主要针对数控机床的几何精度检测进行探讨,因为几何精度检测的主导性较强,而且可控制空间较小。
所谓数控机床几何精度的含义是机床一些工作部件如工作台面、导轨、刀架溜板等在数控机床处于静止状态或者运动较慢的情况下的精度,通常是指的这些构建的平面度、直线度和一些相对运动所允许的误差等,对于这些构建几何精度的检测是较为直观的,但是又非常不好把握,因为一个平面的平整程度或者一些相对运动构建运行时所产生的误差是否在允许范围内的检测不能够出现丝毫的差错,要求精确度非常高的测量手段,可以说几何精度的检测是数控机床精度得以保障的前提条件。
692022年3月上 第05期 总第377期0.引言激光跟踪测量系统(Laser Tracker System)又称激光跟踪仪,是工业测量系统中一种高精度的大尺寸测量仪器。
它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标值。
它同时具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等优点,适合于大尺寸工件配装测量。
为了便于携带,一套激光跟踪仪系统分为跟踪部、跟踪仪控制机、应用处理机和靶标4个主要部分组成[1]。
民机行业应用最为广泛的激光跟踪仪包括Leica AT 和LTD 系列,如图1所示,此设备测量精度为±(15μm+ 6μm/m),通常使用的靶标半径为6.35mm,如配合测量辅助底座,则所测点高度提升至7.9375mm,多台测量设备联网可建立更大范围测量系统。
目前激光跟踪仪主要用于对飞机装配关键尺寸要素进行测量,如蒙皮外形、长桁轴线、拉紧接头、座椅滑轨、水平测量点、起落架安装交点等。
激光跟踪仪在大部件交付验收、飞机总装对接等工作中发挥着必不可少的作用。
图1 激光跟踪仪激光跟踪仪测量工作主要内容包括建立测量基准坐标系、部/组件调整定位、在已建的坐标系下进行现场实物测量、获得实测数据、进行数据分析、最终产品结构尺寸质量分析评判并形成测量报告。
与之对应,那么测量工作的误差主要有基准误差、部件定位误差、测量过程误差和数据分析误差等。
在这里我主要研讨在进行数据分析的过程中可能存在的误差,同时该误差与之前的每一项工作中存在的误差都有着密不可分的联系,通过分析我们也能更加明确他们的相互关系。
实际工作中,我们都是通过获取点的三维坐标值来进行测量和分析的,但不同的测量项目选取点的方式也不尽相同。
按照是否存在理论坐标值可分为确定点和不确定点(测量时无法找出确定的点位,对于所测点也不能确定其理论坐标值);按照测量内容可分为点位置的测量、平面位置的测量和曲面外形的测量。
激光跟踪仪在测量工件尺寸及形位误差上的应用
作者:杨建新杨玉洲
来源:《科技创新与应用》2015年第13期
摘要:文章通过对TrackerCal 4型激光跟踪仪的基本结构和工作原理的简单介绍,结合其对工件尺寸及形位误差的测量方法、测量结果分析以及误差补偿分析,从而掌握了激光跟踪仪在测量中的使用技巧,进而达到提高测量效率和测量精度的目的。
关键词:激光跟踪仪;形位误差;尺寸;误差补偿
引言
目前我国机械加工单位用来检测工件尺寸及形位误差的工具大都还是使用千分尺,游标卡尺等配合使用数控机床打表的传统方法来测量。
传统方法虽然也能很好的检测工件误差精度,但有很多检测问题是用传统方法解决不了的,且费时费力,效率低下。
随着对工件加工精度要求的提高,传统的检测方法在提高检测精度上有一定的局限性,因此使用激光跟踪仪检测工件不仅可以提高测量精度而且简便快捷,大大的节省了人力物力。
1 基本结构和工作原理
TrackerCal 4型激光跟踪仪由Radian 跟踪头和控制箱、5米接线电缆、气象站(含1根1.5米连接线、1个空气温度传感器、1个材料温度传感器、一个大气压力传感器)、连接网线、SMR-1.5英寸直径空心靶球、电缆包、防尘盖、校准三脚架、系统软件等构成。
激光跟踪仪是在激光干涉仪的基础上结合先进的伺服控制技术得到目标点相对于跟踪头的位置,工作基本原理是在工件被测位置上放置靶球(充当反射器),跟踪头发射出来的激光射到靶球上,并返回到跟踪头,当靶球移动时,跟踪头实时的转动来对准目标,与此同时,返回光束被检测系统所接收,以此来测算目标的空间位置。
注:1-跟踪头和控制箱;2-连接网线;3-电源线;4-5米接线电缆;5-电缆包;6-SMR-1.5英寸直径空心靶球;7-靶球清洁套装;8-气象站;9-防尘盖。
图1
2 工件尺寸的测量
以测量加工孔的直径为例:
(1)首先把激光跟踪仪各部件连接起来布置好位置,摆放位置必须保证被测加工孔能够接收跟踪头发出的光束且光束不中断。
如图2所示。
(2)打开控制器上的电源开关,对激光跟踪仪进行预热,预热时间大约半个小时。
预热期间,跟踪头上的红灯一直处于闪烁状态,等待预热完成后,红灯稳定,此时打开伺服开关(两个开关打开次序不能变)。
(3)调整三脚架的高度以适应被测部位,并对激光跟踪仪进行系统检查和校准,此时靶球必须放在鸟巢位置上。
首先进行前、后视精度检查,确认角度偏差优于0.003度。
当结果超出规定时,相应的超标项会回被标红提示,此时必须做“快速立体式补偿”,直到补偿后的结果达到要求的精度为止。
(4)将靶球拿下,保证光束不中断的情况下将靶球贴放在被测加工孔的加工面上,对于便于采点的部位,采用空间连续扫描方式进行采点,采点过程中,跟踪头上的绿灯一直处于闪烁状态,采点结束时,人工遮挡光束,此时绿灯灭。
(5)运用跟踪仪配备的空间分析软件(SA)对采集到的点进行处理,进行拟合圆柱操作。
圆柱拟合结束时,圆周的直径随之被计算出来。
(6)将电脑计算出来的直径与图纸要求的直径进行比照,便可得知加工孔的精度。
3 工件形位误差的测量
以图2三个加工孔的对称度为例:
(1)重复上述2(1)-(3)的步骤,因为在进行每一次新的测量工作之前都要进行系统检查和校准。
(2)按上述2(4)步骤进行操作,对三个加工孔分别进行空间连续扫描,并分别拟合圆柱。
(3)运用空间分析软件,将三个加工孔的中心轴线显现出来。
之后做一基准面,该基准面由下面两个加工孔的中心轴线确定。
最后将上面加工孔的中心轴线投影到该基准面上,计算投影线到基准面上两中心轴线的距离。
(4)比较两段距离相差多少,判断对称度。
4 检测结果及误差补偿分析
在测量过程中,若发现每次测量之后的测量数据变化浮动较大,或测量数据始终达不到预想的效果,则应检查气象站。
打“数据诊断窗口”找到“空气温度”、“空气压力”、“材料温度”确认这些数据是激活的而且是更新的,确保对环境温度、压力、材料温度进行补偿。
同时在采点的整个过程中应保证光束不被中断,因为中断后再接收的光不再是AMD光,否则对测量结果也会产生不利影响。
由于激光跟踪仪属于高精密仪器,所以在使用过程中应尽量避免嘈杂,避免机床运转造成的震颤等环境。
5 结束语
当今传统的测量方法还占据着主流地位,但随着对加工精度要求的一步步提高,好多测量问题是传统方法无法解决的,但应用激光跟踪仪可以轻松的解决这些问题。
通过它我们可以对加工件的尺寸和形位误差进行检测、评定及误差补偿。
通过对检测结果的分析,可以帮助我们了解误差产生的原因。
激光跟踪仪的实用价值很高,我们应该充分的使用它来提高加工件的检测精度,帮助我们生产出更高精度的工件。
参考文献
[1]TrackerCal4激光跟踪仪用户手册(版本4)[Z].
[2]SMX公司.SMX激光跟踪仪产品介绍[Z].2001.
[3]张春富,张军,唐文彦,等.激光跟踪仪在大尺寸工件几何特性参数测量中的应用[J].工具技术,2002,36:26-28.
作者简介:杨建新,女,汉族,一重集团天津重工有限公司,助理工程师。
杨玉洲,男,汉族,河北省送变电公司。