信号与系统特解举例
- 格式:ppt
- 大小:205.00 KB
- 文档页数:3

![[信号与系统作业解答]第二章](https://uimg.taocdn.com/90bd92d5240c844769eaeeda.webp)
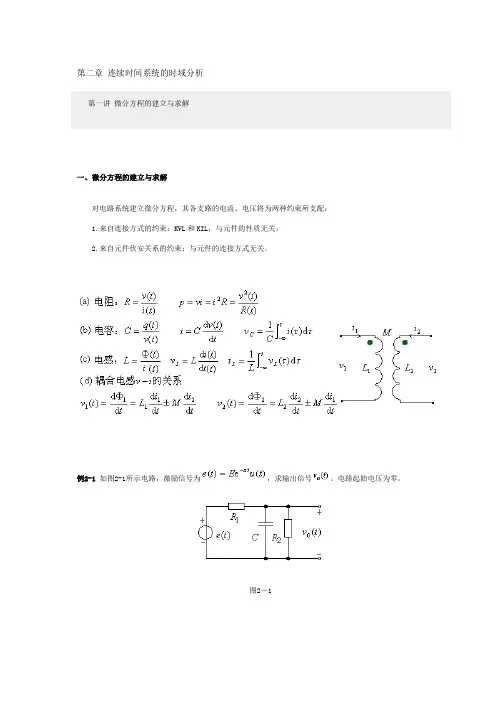
第二章 连续时间系统的时域分析第一讲 微分方程的建立与求解一、微分方程的建立与求解对电路系统建立微分方程,其各支路的电流、电压将为两种约束所支配: 1.来自连接方式的约束:KVL 和KIL ,与元件的性质无关。
2.来自元件伏安关系的约束:与元件的连接方式无关。
例2-1 如图2-1所示电路,激励信号为,求输出信号。
电路起始电压为零。
图2-1解以输出电压为响应变量,列回路电压方程:所以齐次解为:。
因激励信号为,若,则,将其代入微分方程:所以,从而求得完全解:由于电路起始电压为零并且输入不是冲激信号,所以电容两端电压不会发生跳变,,从而若,则特解为,将其代入微分方程,并利用起始条件求出系数,从而得到:二、起始条件的跳变——从到1.系统的状态(起始与初始状态)(1)系统的状态:系统在某一时刻的状态是一组必须知道的最少量的数据,利用这组数据和系统的模型以及该时刻接入的激励信号,就能够完全确定系统任何时刻的响应。
由于激励信号的接入,系统响应及其各阶导数可能在t=0时刻发生跳变,所以以表示激励接入之前的瞬时,而以表示激励接入以后的瞬时。
(2)起始状态:,它决定了零输入响应,在激励接入之前的瞬时t=系统的状态,它总结了计算未来响应所需要的过去的全部信息。
(3)初始状态:跳变量,它决定了零状态响应,在激励接入之后的瞬时系统的状态。
(4)初始条件:它决定了完全响应。
这三个量的关系是:。
2.初始条件的确定(换路定律)电容电压和电感电流在换路(电路接通、断开、接线突变、电路参数突变、电源突变)瞬间前后不能发生突变,即是连续的。
时不变:时变:例电路如图2-2所示,t=0以前开关位于"1"已进入稳态,t=0时刻,开关自"1"转至"2"。
(1)试从物理概念判断、和、。
(2)写出t>0时间内描述系统的微分方程式,求的完全响应。
图2-2解(1)换路前电路处于稳态电感相当于短路,电感电流,电容相当于开路= 0,= = 0。
常用公式 第一章判断周期信号方法两个周期信号x(t),y(t)的周期分别为T1和T2,若其周期之比T1/T2为有理数,则其和信号x(t)+y(t)仍然是周期信号,其周期为T1和T2的最小公倍数。
2/2/2/(2/),/N N M M N πβπβπβπβπβ==仅当为整数时正弦序列才具有周期当为有理数时 正弦序列仍具有周期性, 其周期为取使为整数的最小整数当2为无理数时 正弦序列不具有周期性,1、连续正弦信号一定是周期信号,而正弦序列不一定是周期序列。
2、两连续周期信号之和不一定是周期信号,而两周期序列之和一定是周期序列。
信号的能量 def2()E f t dt +∞-∞=⎰信号的平均功率 def2/2/21lim ()T T T P f t dt T +-→∞=⎰ 冲激函数的特性'''()()(0)()(0)()f t t f t f t δδδ=- ()()(0)()f t t f t δδ=()()()()f t t a f a t a δδ-=- ()()(0),f t t dt f δ∞-∞=⎰()()()f t t a dt f a δ∞-∞-=⎰()()11()()n n nat t a a δδ=001()()t at t t a aδδ-=- 000()()()()f k k k f k k k δδ-=-()()()()(1)(0)n n n t f t dt f δ∞∞=-⎰- ''()()(0)t f t dt f δ∞∞=-⎰-动态系统是线性系统的条件可分解性 {}{}{}{}()()()0,()(0),0f x y y y T f T x •=•+•=•+⎡⎤⎡⎤⎣⎦⎣⎦ 零状态线性 {}{}{}{}{}{}12120,()()0,()0,()T af t bf t aT f bT f +=•+•⎡⎤⎡⎤⎡⎤⎣⎦⎣⎦⎣⎦ 零输入线性 {}{}{}{}{}{}1212(0)(0),0(0),0(0),0T ax bx aT x bT x +=+⎡⎤⎡⎤⎡⎤⎣⎦⎣⎦⎣⎦判断系统时不变、因果、稳定的方法。
《信号与系统》知识点总结北京交通大学电子信息工程学院程轶平2009.60. 前言本文的目的是帮助《信号与系统》课程学习者整理知识。
它适合于对《信号与系统》已经建立起一定的框架,但可能对某些问题感到模糊或困惑的人阅读。
本文也试图对一些类型的计算题给出机械的标准化的解法。
过于容易,或不太可能被考试题考察的知识点在此省略。
知识点基本上按照章来组织和编号。
但是如果不同的章有相类似的知识点,我将把它们合并成一个,然后用字母M (mixed)开头编号。
另外大家要注意将本文和教材结合起来看。
它的目的是整理思路,因此不能对它期望过多。
符号*表示卷积,而不是乘法。
1. 第1章1.1 能量信号和功率信号请阅读教材第4页。
1.2 系统的线性和非线性,时不变和时变,因果和非因果请阅读教材相关内容。
这里,我对系统的线性和非线性给出我的一点个人看法。
严格地说来,系统是否线性指的是系统的输出对输入满足齐次性和叠加性。
按照这个标准,如果系统的输出和某个系统的“初始状态”有关,即其不能视为一个线性系统。
但是,很多教材都从实用的角度出发,将线性的定义放宽为允许将初始状态看做一种特殊的输入,因而很多按照原来定义不是线性的系统成为了线性系统。
在第3章我还要对此问题作进一步的阐述。
2. 第2章2.1 冲激信号的性质筛选特性、抽样特性、展缩特性,即教材中公式(2-21),(2-22),(2-23)必须在理解的基础上记忆。
冲激信号δ(t)不是一般意义上的信号,而是一种理想化的“信号”,在数学上它是一广义函数。
我们无法离开冲激信号因为它为我们的推导和思维提供了很多方便。
冲激信号虽然在物理上不存在,但如果一个物理信号取到非0值的时间集中在某个瞬时,就可用冲激信号近似。
不过要注意脉冲信号δ[k]却是完完全全的一般意义上的信号。
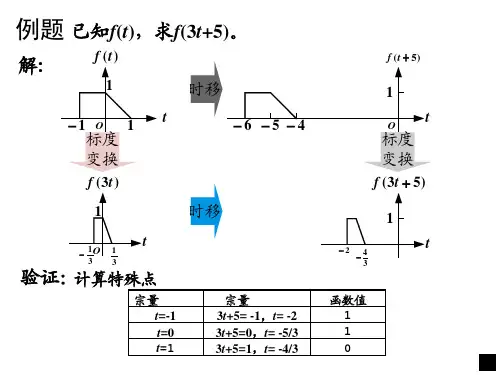
2.2 信号的尺度变换、翻转与时移图示解题方法对这种类型的题目。
针对信号是连续或离散应采用不同的解题步骤。
对于连续信号,大家应仔细阅读教材中的例子,特别是例2-6。
第二章 连续时间系统的时域分析2.1 系统模型为便于对系统进行分析,需要建立系统的模型,在模型的基础上可以运用数学工具对系统进行研究。
一. 模型:模型是系统物理特性的数学抽象,以数学表达式或具有理想特性的符号组合图形来表征系统特性。
由电路图可列出方程:dt t de C t i dt t di RC dtt i d LC t e t Ri dt t di L dt t i Ct)()()()()()()()(122=++=++⎰∞-即:这就是系统的数学模型。
二. 系统模型的建立是有一定条件的:1. 对于同一物理系统在不同条件之下,可以得到不同形式的数学模型。
(参考书中P29)2. 对于不同的物理系统,经过抽象和近似有可能得到形式上完全相同的数学模型。
(参考书中P29)建立系统模型只是进行系统分析工作的第一步,为求得给定激励条件下系统的响应,还应当知道激励接入瞬间系统内部的能量储存情况。
如果系统数学模型、起始状态以及输入激励信号都已确定,即可运用数学方法求解其响应。
一般情况下我们对所求得结果可以作出物理解释赋予物理意义。
综上所述,系统分析的过程,是从实际物理问题抽象为数学模型,经过数学解释后再回到物理实际的过程。
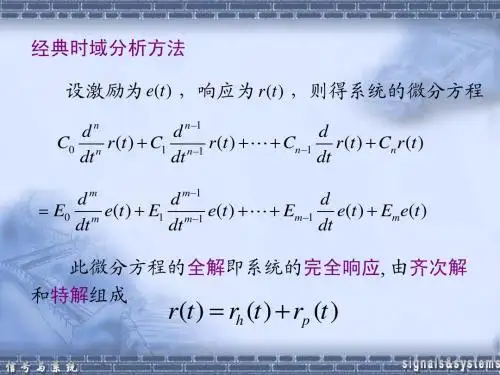
也即:建立数学模型解数学模型对解加于物理解释三. 时域分析方法时域分析:在分析过程中,所涉及到的函数都是时间的函数。
(1)经典方法:求解微分方程(2)卷积积分法(重点内容)2.2 线性时不变系统微分方程的建立分析对象:线性的、时不变系统(非时变系统)教学目标:熟练掌握建立线性系统的微分方程的方法。
重点:电路系统建立微分方程的基本依据。
难点:用网孔电流法及节点电位法列状态方程。
一.一. 电路系统建立微分方程的基本依据1.元件特性约束(电路元件的伏安特性)(1)电阻器:-R由欧姆定律:)( )()(1)(tiRtutuRtiRRRR⋅==或若电阻特性参数与时间无关,即R与流过电阻器的电流或施加的电压大小无关,则此电阻称为时不变电阻或线性电阻。
信号与系统离散时间系统习题详解8-2 列出图题8-2所示系统的差分方程,指出其阶次。
图 题8-2解:1201[][1][2][][1]y n b y n b y n a x n a x n ----=+- 二阶8-3 列出图题8-3所示系统的差分方程,已知边界条件y [-1] = 0,分别求以下输入序列时的输出y [n ],并绘出其图形(用逐次迭代方法求)。
(1)[][]x n n δ= (2)[][]x n u n = 图 题8-3解:1[][1][]3y n y n x n --=(1) 1[][]3ny n u n ⎛⎫= ⎪⎝⎭(2)311[](())[]223n y n u n =-8-7 求解下列差分方程的完全解。
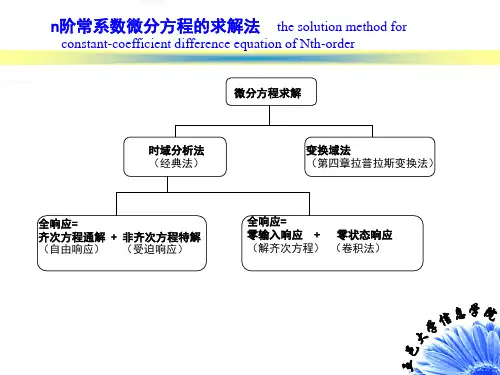
(1)[]2[1]2, [0]1y n y n n y +-=-= (2)[]5[1],y n y n n =--+ [1]0y -=解:(1)方程齐次解为:h [](2)ny n C =-,特解为:p 12[]y n D n D =+,代入原方程121212142(1)2 2 , 39D n D D n D n D D ++-+=-→==-完全响应为:()14[]239ny n C n =-+-,代入1]0[=y 得:913=C()1314[]2939ny n n ∴=-+-(2)方程齐次解为:h [](5)ny n C =-,特解为:p 12[]y n D n D =+,代入原方程0234121212155(1)5 , 636D n D D n D n D D +=---+→==完全响应为:()15[]5636ny n C n =-++,代入0]1[=-y 得:365-=C()11[][565]36n y n n +=-++8-12 用单边z 变换解下列差分方程。
(1)y [n ] + 0.1y [n -1] - 0.02y [n -2] = 10 u [n ],y [-1] = 4,y [-2] = 6 (2)y [n ] - 0.9y [n -1] = 0.05 u [n ],y [-1] = 1 (3)y [n ] + 2y [n -1] = (n -2) u [n ],y [0] = 1 解: (2)差分方程两边同时进行z 变换:11211()0.9[()[1]]0.051(){10.9}0.050.9[1]10.050.90.050.9()(1)(0.9)(0.9)(1)(10.9)(10.9)()0.50.4510.910.90.50.45[][]0.10.9zY z z Y z y z z z Y z z y z z z zY z z z z z z z Y z A B z z z z z z zy n z z -----+-=--=+--=+=+------=+=+----=+=---1Z 5[]0.45(0.9)[]n u n u n +(3)由差分方程得:2(0)3(0)2(1)2(1)22y y y y --+-=-∴-==-差分方程两边同时进行z 变换:1221112222()2[()(1)]21(1)22(1)()(1)(12)(1)(12)(12)()33(1)2(1)(2)(1)3949139(1)2(1)z zY z z Y z y z z z z z y Y z z z z z z Y z z z A B C z z z z z z z z z ----++-=----=---+-++-+==++-+-+--=++-+-3413[]((2))[]999n y n n u n =-+-8-13 若描述某线性时不变系统的差分方程为:y [n ] - y [n - 1] - 2y [n - 2] = x [n ] + 2x [n - 2],已知y [-1] = 2,y [-2] = -1/2,x [n ] = u [n ]。
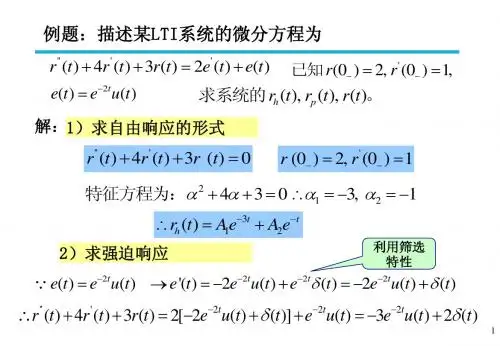
信号与系统例 给定方程)(3)()(2)(3)(t e t e t r t r t r +'=+'+'' 当)()(t u t e =,2)0(,1)0(='=--r r 求()()t r t r zs zi ,=? 解: 1.先求r zi (t)因为零输入响应,故e(t)=0,原方程兑变为0)(2)(3)(=+'+''t r t r t r zi zi zi其特征方程为0232=++αα,α1=-1 ,α2=-2∴t t zi e A e A t r 221)(--+=,)(0 r )(0 r ),(0r )(0r -zi zi-zi zi '='=++ 代入起始状态得()()⎩⎨⎧-===⎪⎭⎪⎬⎫=--='=+=++3422010212121A A AA r A A r zizi)0t (034)(2+--≥>-=∴或t e e t r tt zi2.再求()?t r zs =将)()(t u t e =代入原方程得)(3)()(2)(3)(t u t t r t r t r zs zs zs+=+'+''δ 设)()()(t u b t a t r zs∆+=''δ )()(t u a t r zs∆='+<≤00t )()(t u at t r zs ∆=代入上方程得:)(3)()(2)(3)()(00t u t t u at t u a t u b t a t ∆+=∆+∆+∆+→δδ时,此项为当得:⎩⎨⎧==⇒⎩⎨⎧=+=0133a b 1b a a()()()()()1003000==='⇒='-'∴-++-+zs zs zszs zsr r r a r r当+≥0t 时,()t r zs 满足方程)(3)(2)(3)(t u t r t r t r zs zs zs=+'+''设特解 ()B t p r zs =代入上方程得 23=B()+--≥++=∴023)(221t e B e B t r t t ZS代入)0(),0(++'zszs r r 得 ⎪⎩⎪⎨⎧-==⇒⎪⎩⎪⎨⎧=--=++25232123212121B B B B B B()023252)(2>+⎪⎭⎫⎝⎛-+=∴--t e e t r t t zs【例】已知f 1(t )=(3e -2t -1)u (t )和f 2(t )=e t u (t ), 试求卷积f 1(t )*f 2(t )。