苏一光、科力达全站仪使用说明书 ppt课件
- 格式:ppt
- 大小:14.75 MB
- 文档页数:38
苏一光全站仪操作细部步骤一、距离测量步骤1:将全站仪架设于测站点已知点O上、对中、调平全站仪。
步骤2:将棱镜架设到待测点A,调平,反光棱镜朝向全站仪。
步骤3:打开仪器,出现画面步骤4:用全站仪对准反光棱镜十字丝中心,按DIST键。
二、坐标测量每个小组选取两个已知点0点和A点,一个待测点B点,并做好标记。
设0点的坐标为(0,0),A点的坐标(10,0),测量待测点B 的坐标。
步骤1:将全站仪架设于测站点O点上,对中整平。
将对中杆棱镜架设后视点A上,将反光棱镜朝向全站仪。
步骤2:打开全站仪电源,按CORD键进入坐标测量,出现如下画面再按F4切换键,步骤三:按F3键,切换到以下画面步骤四:按F1键,出现如下画面步骤六:点F3切换到字母键,点名设置为O。
输入O点坐标(0,0),步骤五:点F3切换到字母键,点名设置为O。
输入O点坐标(0,0),完成后按ENT键结束。
步骤六:按F2键进入如下界面步骤七:按F1输入后视点,出现如下画面,输入后视点坐标,按ENT 键结束。
步骤八:按ENT键保存步骤九:按ENT键保存后出现如下画面,对准反光棱镜,按ENT键,坐标系建立。
步骤10:将反光棱镜移至B点,对中调平,反光棱镜朝向全站仪。
将照准部对准反光棱镜中心,出现如下画面,B点坐标(3.87,0.192)三、坐标放样(应该说明任务才对)步骤1:按MENU菜单键,出现如下画面步骤2:按▼向下键,选中放样,然后按ENT键,出现如下画面步骤3:先设置测站点O(仪器架设点)的坐标。
将(0,0)一次输入,高程Z 略过。
N与E坐标输入之间切换按F4确认键,输入完毕后点ENT键结束后视点坐标输入。
步骤4:选择设置后视点,按ENT键进入。
如测站点坐标输入一样,一次输入后视点坐标,出现如下画面,完成输入后按ENT结束。
步骤5:将对中杆放置于后视点(0,10),气泡居中调平,全站仪照准部对准反光棱镜中心后按ENT键,此时,坐标系建立。
选中放样,按ENT键出现如下画面步骤6:依次输入放样点坐标(10,10),然后按ENT键结束放样点坐标输入,出现画面,选择测距后出现如下画面按F1距离键,出现如下画面步骤7:松开水平制动螺旋,,转动照准部,将dHR调为0.00.00,这时,待测点就在视准轴上。
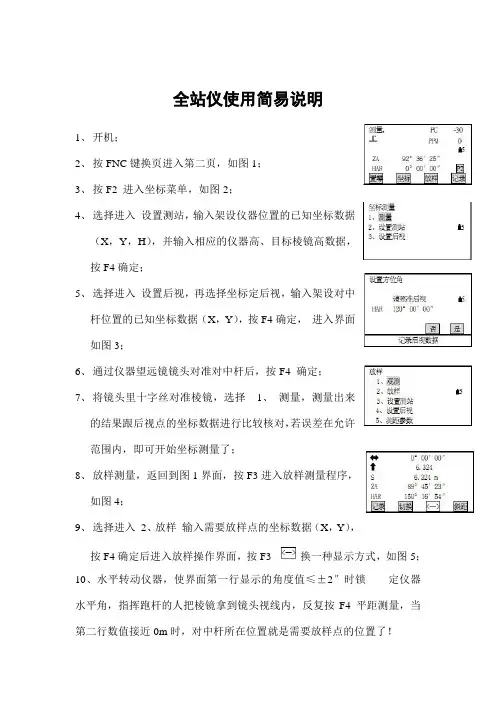
全站仪使用简易说明
1、开机;
2、按FNC键换页进入第二页,如图1;
3、按F2 进入坐标菜单,如图2;
4、选择进入设置测站,输入架设仪器位置的已知坐标数据
(X,Y,H),并输入相应的仪器高、目标棱镜高数据,
按F4确定;
5、选择进入设置后视,再选择坐标定后视,输入架设对中
杆位置的已知坐标数据(X,Y),按F4确定,进入界面
如图3;
6、通过仪器望远镜镜头对准对中杆后,按F4 确定;
7、将镜头里十字丝对准棱镜,选择1、测量,测量出来
的结果跟后视点的坐标数据进行比较核对,若误差在允许
范围内,即可开始坐标测量了;
8、放样测量,返回到图1界面,按F3进入放样测量程序,
如图4;
9、选择进入2、放样输入需要放样点的坐标数据(X,Y),
按F4确定后进入放样操作界面,按F3 换一种显示方式,如图5;
10、水平转动仪器,使界面第一行显示的角度值≤±2″时锁定仪器水平角,指挥跑杆的人把棱镜拿到镜头视线内,反复按F4 平距测量,当第二行数值接近0m时,对中杆所在位置就是需要放样点的位置了!。
一、仪器面板外观和功能说明 1、仪器外观 2、显示屏上显示符号的含义 3、全站仪几种测量模式介绍(1)角度测量模式(2)距离测量模式(3)坐标测量模式(4)主菜单模式按MENU进入,可进行数据采集、坐标放样、程序执行、内存管理(数据文件编辑、传输及一、仪器面板外观和功能说明1、仪器外观2、显示屏上显示符号的含义3、全站仪几种测量模式介绍(1)角度测量模式(2)距离测量模式(3)坐标测量模式(4)主菜单模式按MENU进入,可进行数据采集、坐标放样、程序执行、内存管理(数据文件编辑、传输及查询)、参数设置等。
(略)二、全站仪功能简介1、对中整平后,按开关键()开机后,上下转动望远镜几周,然后使仪器水平盘转动几周,完成仪器初始化工作,直至显示水平度盘角值HR、竖直度盘角值VZ为止。
2、参数设置按 EDM 键进入测距设置,按棱镜常数( F2 )——输入( F1 )——-30 ——确认( F4 两次)——再按大气改正( F3 )——输入( F1 ),在温度栏输入气温,如 30 ——按确认( F4 )——向下移动光标( EDM ),至气压栏——输入( F1 )——输入气压,如: 1013 hpa ——确认( F4 两次)——按 ESC 键回到测角模式。
说明:参数设置后,在没有新设置前,仪器将保存现有设置。
(一)角度测量反复按 EDM 键,进入测角模式(开机后默认的模式)。
屏幕出现:以测回法为例,测量水平角 <AOB 。
盘左瞄准左边目标 A 点——配置水平度盘,若要配至0°00'00"则按置零( F1 )——是( F3 ), HR 显示0°00'00"——顺时针旋转瞄准右边 B 点,记下水平度盘 HR 的大小——倒镜成盘右,瞄准右边 B 点,记下 HR 的大小——逆时针旋转瞄准左边 A 点,记下 HR 的大小。
注:若要配至0°02'30",则按 F4 两次翻至第 3 页——按设角( F3 )——输入( F1 ),输入“ 0.0230 ” ——确认( F4 两次),出现0°02'30"。
苏一光全站仪使用方法第一节技术规格RTS635全站仪是中文、数字键盘全站仪,内置大容量内存和各种应用测量程序。
测角部分采用光栅增量式数字角度测量系统,测距部分采用相位式距离测量系统;使用微型计算机技术进行测量、计算、显示、存储等多项功能;可同时显示水平角、垂直角、斜距或平距、高差等测量结果,可以进行角度、坡度等多种模式的测量。
RTS635全站仪可广泛应用于国家和城市的三、四等三角控制测量,用于铁路、公路、桥梁、水利、矿山等方面的工程测量,也可用于建筑、大型设备的安装,应用于地籍测量、地形测量和多种工程测量。
一、性能特点⏹键盘操作快捷采用了软键和数字键盘相结合的方式,按键方便、快捷,易学易用。
⏹全面参数设置多达12项参数的设置功能,可满足于各种专业测量和工程测量。
⏹内存文件化管理采用了具体内存的程序模块,仅存放坐标数据可达8000点以上,可方便进行内存管理。
⏹多样化数据采集能自动记录坐标数据和测量数据,可直接与计算机传输数据实现数字化测量⏹坐标数据上传通过仪器自带的下载软件和数据线,可实现坐标数据在仪器和电脑间的双向传输⏹可选激光下对点可调激光亮度、可调光斑大小,使得测量更加方便⏹温度设定范围 -40℃~ +60℃步长 1℃⏹大气压改正 600hPa-1500hPa 步长 1hPa⏹测距最小读数精密测量模式1mm 跟踪测量模式10mm⏹棱镜常数改正 -99.9mm ~ +99.9mm⏹角度测量?读数系统? 光电增量编码系统二、技术指标望远镜成像正像放大倍率 30×有效孔径望远:40 mm,测距:45 mm分辨率 4″视场角 1°30′最短视距 1.7m角度测量测角方式光电增量式光栅盘直径(水平、竖直) 79 mm最小显示读数 1″/5″可选探测方式水平角:双竖直角:单精度 RTS632?? 2″级RTS635 5″级距离测量测程单个棱镜 RTS632/635 1800m三棱镜 RTS632/635 2500m数字显示最大:+/-999999.999m?? 最小:1mm精度 RTS632/635 ??±(3 mm+2ppm·D)测量时间 RTS632/635 精测单次1.8 秒,跟踪0.7 秒气象改正输入参数自动改正大气折光和地球曲率改正输入参数自动改正,K=0.14/0.2可选反射棱镜常数改正输入参数自动改正水准器长水准器 30″/ 2 mm圆水准器 8′/ 2 mm竖盘补偿器系统液体电容式,可选工作范围±3′分辨率 1″光学对中器成像正像放大倍率 3 ×调焦范围 0.5 m~∝视场角 5°显示屏类型 LCD,四行,图形式数据传输接口 RS-232C机载电池电源可充电镍-氢电池电压直流7.2V连续工作时间连续测距/ 角度测量约4 小时角度测量约12小时使用环境枣工作环境温度- 20°~+45℃尺寸及重量外形尺寸 160 × 155 × 360 mm重量 5.5kg第二节仪器外观各部件名称一、部件名称二、屏幕显示2. 测量模式显示示例显示屏采用点阵图形式液晶显示(LCD),可显示4 行汉字,每行8 个汉字。
苏一光全站仪一、全站仪的角度测量1、角度测量对中、整平→开机→转动望远镜初始化→盘左照准目标A 制动F4(P1)→F4(P2)→F4(P3) F2(左右)HL→HRF3(设角)→ F1(输入)→0度0分30秒→F4(确认)记录VZ、HR数据A1、A2照准下个目标B 制动记录数据B1、B2盘右照准目标B 制动记录数据B3、B4照准目标A 制动记录数据 A3、A4结束一个测回2、角度计算2.1水平角计算测回法A左=B2-A2 A右=B4-A4 A的水平角=1/2(A左+A右)每个测站需多个测回然后取平均值测回差不大于24秒2.2竖直角计算A左=90°-A1 A右=A3-270° A的竖直角=1/2(A左+A右)B左=90°-B1 B右=B3-270° B的竖直角=1/2(B左+B右)二、全站仪坐标测量1、对中整平2、观测开机-初始化-按EMD→F1(测距)→F1(粗测)→F4(确定)F2(棱镜)→F1(输入)(如-30)→F4(确定)F3(大气)→F1(输入)(20度,760毫米水银柱)→F4(确定)按MENU→F2(数据采集)→F1(输入文件名)→F4(确定)→F3(是) F1(测站设置)→F4(N E Z )→F1(输入)(500,500,75)→F4(确定)→F1(输入点号)(如S13)→F4(确定)向下选择Ins.Hi=1.538→F4(确定)→F3(记录)F2(后视设置)→F1(输入)(后视点,如M03)→F4(确定)向下选择(镜高)(如0.15米)→F4(确认)F2(后视)→F3(NE)→F1(输入)(如504.421,501.792)→F4(确认)→F3(是)→F3(测量)(照准后)→F1(VH)F3(碎部)→F3(测量)(照准后)→F3(NEZ)按esc退至NEZ界面(可用DISP健切换HR SR VZ等界面)F1(测距) F2(保存)3、坐标内业计算坐标计算分正算和反算两类坐标增量地面上两点的直角坐标值之差称为坐标增量3.1坐标正算有一个已知点的坐标及该点至未知点的距离和坐标方位角,计算未如图,已知A 点坐标为A (xa ,ya ),测出A 点至B 点的坐标方位角ɑAB 和水平距离DAB ,求B 点的坐标(xb ,yb )。


科力达全站仪说明书1. 简介1.1 什么是科力达全站仪科力达全站仪是一种用于测量地理空间坐标、观测地球表面形状及变形、建设工程测量等的精密仪器。
它采用激光技术和电子技术相结合,能够进行高精度的测量和定位。
1.2 科力达全站仪的应用领域科力达全站仪广泛应用于建筑工程、铁路、公路、桥梁、隧道、矿山开采等领域。
它可以提供高精度的测量数据,为工程施工提供准确的参考和测量基准。
2. 使用方法2.1 准备工作在使用科力达全站仪之前,需要进行准备工作。
2.1.1 选择测量点根据需要进行测量的区域,选择合适的测量点。
测量点应尽可能稳定,避免有明显变形或移动的地方。
2.1.2 检查仪器状态确保科力达全站仪的电量充足,各个部件完好无损,并进行必要的校准和检测。
2.2 进行测量2.2.1 设置基准点首先,需要设置测量的基准点。
基准点应选取在测量区域较稳定的位置,并进行标记。
2.2.2 安装仪器将科力达全站仪安装在合适的位置,确保其稳固且与测量点有良好的视线连接。
2.2.3 进行测量根据实际需求,选择合适的测量模式和参数,并开始进行测量。
在测量过程中,可以根据需要进行记录,以便后续数据处理和分析。
2.3 数据处理与分析2.3.1 下载数据将测量得到的数据通过数据线或无线方式下载到计算机或移动设备上。
2.3.2 数据处理使用专业的数据处理软件对测量数据进行处理和分析。
可以进行数据的筛选、拟合、修正等操作,以得到更准确的结果。
2.3.3 数据可视化将处理后的数据以图形或表格的形式进行可视化展示,方便进行进一步的分析和比较。
3. 注意事项3.1 安全使用在使用科力达全站仪时,要注意安全操作。
避免在危险地形或工作环境中使用,并正确使用个人防护装备。
3.2 保养与维护定期对科力达全站仪进行保养与维护,包括清洁、校准和更换零部件等。
避免长时间暴露在高温、潮湿等环境中,以免影响仪器的正常使用寿命。
3.3 操作规范在使用科力达全站仪时,应按照说明书的要求进行操作。