驱动力加载系统仿真
- 格式:ppt
- 大小:943.50 KB
- 文档页数:45

2009-2010年第2学期系统仿真原理及应用教学内容绪论离散事件系统仿真输入数据的分析仿真结果与系统方案分物流仿真软件介绍学校:武汉科技学院学院:机电工程学院班级:工业工程071姓名:学号:参考教材•《物流系统仿真原理与应用》张晓萍主编.中国物资出版社,2005.•《生产系统建模与仿真》孙小明编著.上海交通大学出版社,2006.•《制造系统建模与仿真》目录第1讲绪论系统仿真技术的发展历史1.2 系统仿真的基本概念系统仿真技术的特点系统仿真的应用系统仿真的相关技术第2讲离散事件系统建模与仿真的基本原理 系统建模与仿真的基本步骤离散事件系统建模的基本要素建立系统模型的常用方法离散事件系统仿真程序的基本结构系统建模与仿真案例分析第3讲输入数据的分析简介原始数据的收集随机变量的识别参数估计拟合度检验第4讲随机变量的产生随机数的生成方法随机数发生器的检验随机变量的生成原理典型随机变量的生成第5讲排队系统的建模与仿真⏹排队论的基本概念排队系统的组成到达模式服务机构排队规则队列的度量⏹排队模型的分类⏹排队系统的分析单服务台M/M/1模型多服务台M/M/c模型M/M/c和M/M/1模型比较第6讲系统仿真算法事件调度法活动扫描法进程交互法第1讲绪论1.1 系统仿真技术的发展历史一、系统模型系统模型——对实际系统进行简化和抽象、能够揭示系统元素之间关系和系统特征的相关元素实体。
•物理模型——根据相似准则缩小和简化的实际系统,对这样的物理模型进行实验研究,其结果可以近似推广到原系统。
存在的主要问题:研究费用较为昂贵试验是有限制的需要花费大量的时间数学模型仿真模型1952年美国成立仿真学会美国的《21世纪制造业发展战略报告》中提出,2020年前世界制造业面临的6大挑战和10大关键技术中,10大关键技术的第5项是“企业建模及仿真”。
20世纪40年代,冯·诺依曼正式提出了系统仿真的概念世界先进国家的生产企业将生产仿真研究作为研究生产系统的一个重要手段,如英特尔、戴尔、马士基等,在企业扩建和改造的前期、新产品生产的投入之前,都会运营计算机仿真技术对企业将要采用的生产系统进行仿真和预测,为生产系统的调度决策、生产能力预测、生产设备的合理匹配、生产线的效率提高提供量化依据,为生产系统的早日投入正常生产运行起到出谋划策的作用。

基于Fluent高压气动驱动系统的仿真研究董岱;李小宁【摘要】为获得某高压气动负载驱动系统的驱动特性,建立其包含储气瓶、控制阀和气缸进气腔的三维模型,基于流场仿真软件Fluent平台,运用动网格技术和UDF实现了该驱动系统的动态仿真,得到三维流场压力、速度等随时间变化和气缸活塞的运动特性.通过改变系统参数,分析了驱动系统的负载驱动特性随储气瓶初始压力、控制阀通径和气缸缸径的变化规律,为驱动系统的设计提供了参考依据.【期刊名称】《液压与气动》【年(卷),期】2015(000)006【总页数】4页(P76-79)【关键词】Fluent;仿真;动网格;UDF;高压驱动系统【作者】董岱;李小宁【作者单位】南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094【正文语种】中文【中图分类】TH138引言某高压气动驱动系统主要由储气瓶、控制阀、驱动气缸和负载组成,通过一定压力的压缩空气驱动气缸最终实现负载的高速驱动。
需对该驱动系统进行仿真研究,以获得系统负载驱动特性,为驱动系统的设计提供参考。
目前,对以上气动驱动系统仿真多采用集中参数方法,但该方法忽略了系统内部结构对气体流动的影响,往往误差较大;随着计算机技术的发展,CFD(Computational Fluid Dynamics,计算流体动力学)技术已经逐步成为流场仿真分析的重要手段[1],运用CFD软件对气动元件流场仿真已有较多研究[2-6]。
本研究以Fluent软件为平台,建立了包括储气罐、控制阀和气缸进气腔等在内的驱动系统三维模型,运用动网格技术对驱动系统进行数值仿真,得到系统的负载驱动特性。
1 驱动系统原理驱动系统的组成如图1所示。
驱动系统主要包括储气罐、控制阀、驱动气缸、连接管路和负载。
其工作原理为:储气瓶内存储一定压力的压缩空气气体,通过控制阀来控制气瓶向气缸进气腔充气,通过气缸驱动负载,最终实现负载的高速运动;气缸的排气口被关闭,用于气缸运动末端的缓冲。

伺服驱动系统仿真方案1. 引言伺服驱动系统是控制和调节运动的关键组成部分,在许多自动化应用中被广泛使用。
为了提高驱动系统的性能和稳定性,仿真技术被用于预测和优化系统的行为。
本文将介绍一种伺服驱动系统的仿真方案,以帮助工程师在设计和优化伺服驱动系统时进行可靠的预测和评估。
2. 仿真模型搭建为了进行伺服驱动系统的仿真,首先需要搭建仿真模型。
模型的搭建应包括伺服电机、伺服控制器和载荷的建模。
以下是针对每个组件的详细说明:2.1 伺服电机伺服电机是驱动系统的核心部分,通过转化电能和机械能来提供动力。
在仿真模型中,伺服电机的建模通常采用电动机的方程来描述。
这些方程包括电机的电流和速度之间的关系,以及电机转矩和电机转速之间的关系。
2.2 伺服控制器伺服控制器是伺服驱动系统的控制中枢,用于调节电机的速度和位置。
在仿真模型中,可以采用PID控制器或者其他控制算法来对伺服电机进行控制。
控制器的参数需要根据具体应用的需求进行调整和优化。
2.3 载荷载荷是伺服驱动系统需要承受的外部负载。
在仿真模型中,载荷可以通过质量、摩擦力等因素来描述。
载荷的建模对系统的动态响应和稳定性有重要影响,因此需要根据实际情况进行准确地建模。
3. 仿真过程完成伺服驱动系统的模型搭建后,可以进行仿真实验来评估系统的性能和稳定性。
仿真过程应包括以下几个步骤:3.1 系统参数设置在进行仿真实验之前,需要设置伺服电机、伺服控制器和载荷的参数。
这些参数可以根据实际设备的规格和性能手册来确定。
3.2 仿真环境搭建搭建仿真环境是进行仿真实验的基础步骤。
在仿真环境中,需要设置仿真时间、采样周期和仿真条件等参数。
可以使用MATLAB/Simulink、Python等仿真工具来搭建仿真环境。
3.3 仿真实验设计根据伺服驱动系统的实际需求,设计相应的仿真实验。
可以通过改变载荷、调整控制器参数或者应用不同的控制策略来评估系统的性能和稳定性。
3.4 仿真结果分析仿真实验完成后,可以对仿真结果进行分析。

四轮驱动系统的仿真与优化设计四轮驱动系统是一种以四个车轮为驱动力的系统,与前驱或后驱车辆相比,具有更好的牵引力和稳定性。
随着汽车工业技术的发展,越来越多的汽车采用四轮驱动系统,如越野车、赛车等。
在车辆设计中,仿真与优化可以大大提高四轮驱动系统的性能,保证其安全性和可靠性。
一、四轮驱动系统的基本原理四轮驱动系统是将动力分配到四个车轮,以达到更好的牵引力和行驶稳定性。
四轮驱动系统主要有两种类型:全时四驱(AWD)和可调四驱(4WD)。
全时四驱系统一直处于四轮驱动状态,适用于各种路况;可调四驱系统能够切换到两轮驱动状态,以降低油耗和轮胎磨损。
四轮驱动系统的核心是中央差速器,它能够平衡前后轴的转速差,确保车辆稳定性。
中央差速器的设计需要考虑扭矩分配、载荷分配和制动力分配等因素,以达到最佳性能。
二、四轮驱动系统的仿真分析在车辆设计中,仿真是一种重要的工具,可以模拟不同的工况和驾驶方式,预测系统的性能和行驶稳定性。
四轮驱动系统的仿真需要考虑以下几个方面:1、扭矩分配扭矩分配是决定四个车轮受到的驱动力的重要参数,它取决于车辆结构、发动机性能和四轮驱动系统的设计。
应用仿真分析,可以计算不同驾驶条件下的扭矩分配情况,从而优化四轮驱动系统的性能。
2、行驶稳定性行驶稳定性是保证车辆安全驾驶的重要因素。
采用仿真分析,可以模拟车辆在不同路况下的行驶状态,如制动、起步和转弯等,从而预测车辆的稳定性和操控性。
3、功率分配功率分配是决定四个车轮驱动能力的参数,它是影响车辆加速性能和燃油消耗的重要因素。
利用仿真工具,可以计算不同驾驶条件下的功率分配情况,从而优化车辆的性能和燃油经济性。
三、四轮驱动系统的优化设计在四轮驱动系统设计过程中,需要综合考虑驾驶需求、车辆性能和安全要求,以达到最佳性能。
下面是一些常用的优化设计方法:1、扭矩分配优化通过改变中央差速器的齿轮比例,可以改变扭矩分配情况。
如果需要更好的牵引力,则应将前、后轮扭矩的分配比例设为50:50;如果需要更好的操控性,则应将前轮扭矩占比增加到60%或以上。

浅析汽车牵引力控制系统设计与仿真严彦【摘要】牵引力控制系统通过控制车轮的滑转状态,合理的分配驱动轮力矩,提高了车轮对路面附着的利用程度,有效提高了车辆的动力性,改善了操纵稳定性.首先基于PID算法分别设计了汽车牵引力驱动控制器和制动控制器,并采用Matlab/simulink软件完成算法的模块搭建.然后在Carsim软件中建立了汽车仿真模型,将simulink软件中的驱动控制器和制动控制器分别与汽车模型进行联调.最后对汽车仿真模型在均一低附着路面和分离路面进行仿真模拟,分析了驱动轮滑转率.结果表明,采用汽车牵引力控制系统能够使驱动轮的滑转率控制在目标范围内,能够抑制驱动轮的过度滑转,充分利用地面的附着条件,提高了汽车的动力性和操纵稳定性.【期刊名称】《汽车实用技术》【年(卷),期】2017(000)013【总页数】5页(P60-64)【关键词】牵引力控制系统;滑移率;PID控制;仿真【作者】严彦【作者单位】武汉理工大学,湖北武汉 430070【正文语种】中文【中图分类】U462.1CLC NO.:U462.1 Document Code: A Article ID: 1671-7988 (2017)13-60-05汽车牵引力控制系统(TCS)是车辆在起步、加速、爬坡时防止驱动轮发生过度滑转,以获得最大牵引力和最佳操纵稳定性的一种主动控制系统,是继制动防抱死控制系统(ABS)之后又一新发展,对于改善车辆的牵引性、操纵性、稳定性、安全性和舒适性等具有重要的意义。
本文在Matlab/simulink环境下,对驱动控制的总体模型进行仿真,选取驱动轮的滑转率、驱动轮速、汽车的车身速度、制动轮缸的压力以及节气门的开度作为评价参数,对牵引力控制系统的性能进行评价,分析仿真结果。
1.1 汽车牵引力控制策略研究TCS性能控制工况控制目标涉及汽车的牵引性和操纵稳定性,汽车在不同工况下,对不同性能之间的侧重有所不同。
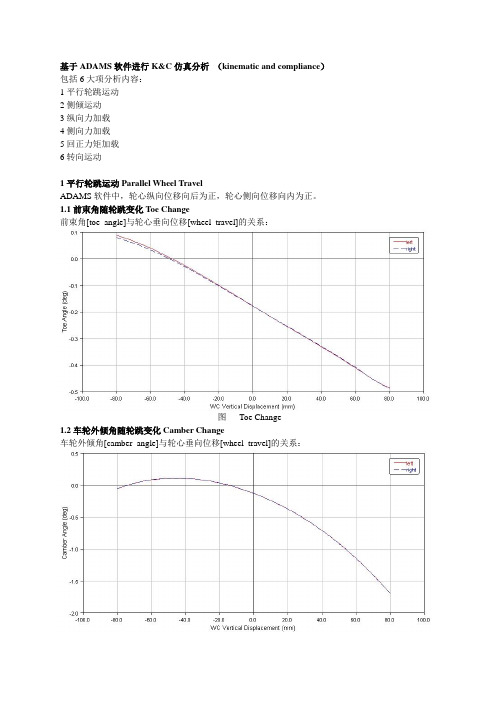
基于ADAMS软件进行K&C仿真分析(kinematic and compliance)包括6大项分析内容:1平行轮跳运动2侧倾运动3纵向力加载4侧向力加载5回正力矩加载6转向运动1平行轮跳运动Parallel Wheel TravelADAMS软件中,轮心纵向位移向后为正,轮心侧向位移向内为正。
1.1前束角随轮跳变化Toe Change前束角[toe_angle]与轮心垂向位移[wheel_travel]的关系:图Toe Change1.2车轮外倾角随轮跳变化Camber Change车轮外倾角[camber_angle]与轮心垂向位移[wheel_travel]的关系:图Camber Change1.3主销后倾角随轮跳变化Caster Change主销后倾角[caster_angle]与轮心垂向位移[wheel_travel]的关系:图Caster Change1.4轮心纵向位移随轮跳变化F/A Displacement of WC轮心纵向位移[wheel_travel_base]与轮心垂向位移[wheel_travel]的关系:图F/A Displacement of WC1.5轮心侧向位移随轮跳变化Lateral Displacement of WC轮心侧向位移[wheel_travel_track]与轮心垂向位移[wheel_travel]的关系:图Lateral Displacement of WC1.6轮心处得到的悬架刚度Wheel Rate轮心处垂向载荷[left(right)_tire_force/normal]与轮心垂向位移[wheel_travel]的关系,曲线斜率即为悬架刚度:图Wheel Rate也可以直接得到轮心处悬架刚度[wheel_rate]与轮心垂向位移[wheel_travel]的关系:图Wheel Rate1.7轮胎接地点处得到的悬架刚度Ride Rate应得到轮胎接地点处垂向载荷与轮胎接地点垂向位移的关系,轮胎接地点位移难以输出。
第35卷第2期2023年4月沈阳大学学报(自然科学版)J o u r n a l o f S h e n y a n g U n i v e r s i t y(N a t u r a l S c i e n c e)V o l.35,N o.2A p r.2023文章编号:2095-5456(2023)02-0151-06某纯电动汽车动力系统能量仿真分析王楷焱1,王云1,戚基艳2(1.沈阳理工大学汽车与交通学院,辽宁沈阳110159;2.沈阳工学院机械工程与自动化学院,辽宁沈阳113122)摘要:基于某仿真软件搭建了纯电动汽车的动力传动模型,并设置了重要部件的参数,研究了N E D C 工况下部分影响因素对输入转速㊁电池S O C的影响结果㊂通过模型可以直观有效地看出动力传动系统能量传递情况,为综合能量流仿真分析发现的问题进一步提出可供参考的优化建议㊂研究结果显示,建立的动力传动系统能量流仿真模型可靠有效;常温N E D C循环工况下的动力工况表现较好㊂关键词:能量流;仿真;动力传动系统;纯电动汽车;N E D C循环工况中图分类号:U469.7文献标志码:AE n e r g y S i m u l a t i o n A n a l y s i so faP u r eE l e c t r i cV e h i c l eP o w e r S y s t e mWA N G K a i y a n1,WA N GY u n1,Q I J i y a n2(1.S c h o o lo f A u t o m o b i l e s&T r a n s p o r t a t i o n,S h e n y a n g L i g o n g U n i v e r s i t y,S h e n y a n g110159,C h i n a;2.S c h o o l o fM e c h a n i c a l E n g i n e e r i n g a n dA u t o m a t i o n,S h e n y a n g I n s t i t u t eo fT e c h n o l o g y,S h e n y a n g113122,C h i n a)A b s t r a c t:B a s e do nas i m u l a t i o ns o f t w a r e,t h e p o w e rt r a n s m i s s i o n m o d e lo f p u r ee l e c t r i c v e h i c l e s w a sc o n s t r u c t e d,a n dt h e p a r a m e t e r s o fi m p o r t a n tc o m p o n e n t s w e r es e t.T h e i n f l u e n c e o f s o m e f a c t o r so n i n p u t s p e e da n db a t t e r y S O Cu n d e rN E DC w o r k i n g c o n d i t i o n s w a s s t u d i e d.T h r o u g h t h em o d e l,t h e e n e r g y t r a n s f e r o f t h e d r i v e t r a i n c a nb e i n t u i t i v e l y a n de f f e c t i v e l y s e e n,a n df u r t h e ro p t i m i z a t i o ns u g g e s t i o n sc a nb e p u t f o r w a r df o r t h e p r o b l e m sf o u n d i n t h e c o m p r e h e n s i v e e n e rg y f l o ws i m u l a t i o n a n a l y s i s.Th e r e s e a r c h r e s u l t s s h o wt h a t t h ee s t a b li s h e d p o w e rt r a n s m i s s i o ns y s t e m e n e r g y f l o w s i m u l a t i o n m o d e l i sr e l i a b l ea n d e f f e c t i v e.T h e p o w e r c o n d i t i o nu n d e r t h e n o r m a l t e m p e r a t u r eN E D Cc y c l e c o n d i t i o n i s g o o d. K e y w o r d s:e n e r g y f l o w;s i m u l a t i o n;p o w e rt r a n s m i s s i o ns y s t e m;p u r ee l e c t r i cv e h i c l e; N E D Cc y c l i c c o n d i t i o n s近年来,电动车凭借着其清洁㊁无污染的特点应用越来越广㊂但是一些问题随之而来,最主要的问题就是行驶里程不够远㊂除了大力发展电池技术以外还可以通过提高能量利用率来提高行驶里程㊂目前针对电动车动力系统运行效率的研究大部分是单个零部件的优化[1],但是电动车在行驶过程中,其动力电池㊁电动机控制器和驱动电动机(也称三电)具有很强的耦合关系,如果只是单一地研究某个零部件就很难达到对动力总成全局优化的效果[2]㊂所以,分析能量在整个动力总成内部的传递以及转化的规律即能量流尤为重要㊂针对电动汽车能量流的研究,现在大多是通过进行系统台架试验,或者是通过软件仿真的方法进行,整车试验应用不广㊂国内外一些学者基于试验对电动汽车能量流进行了很多的研究,但没有单独地针对电动车传动系统能量流来研究㊂收稿日期:20220628基金项目:辽宁省科学技术计划项目(2021-M S-354)㊂作者简介:王楷焱(1983),男,辽宁沈阳人,副教授,博士㊂251沈阳大学学报(自然科学版)第35卷本文在建立了某电动车电机动力传动系统数学模型的基础上,测得了不同工况下由驱动电机转轴与车轮之间的连接部分的有效功率和损耗等,分析了各种工况下电池S O C的使用和回收情况㊂1传动系统能量流仿真模拟1.1能量流原理纯电动汽车的能量由电池提供,储存在电池中的电力通常来自电网㊂有关于纯电动汽车能量消耗常用的计算方法可分为2种:一是将电网输入的交流电量作为能耗的计算依据;二是以动力电池输出的高压直流电量作为能量消耗的计算基础㊂绝大多数纯电动汽车的能量流实验中,都对电网中的电能变化进行监测,考虑充电机㊁充电效率等影响因素来开展能量流的计算分析㊂本文中对能量流的计算依托于基于软件搭建的整车能量流仿真模型,是以动力电池输出的高压直流电为计算基础的,动力电池的总输出能量包括电池满电的能量和制动时回收的部分能量[3]㊂当车辆刹车时,能量通过其他制动装置从车轮转移到电池㊂汽车运行时,电池首先将储存的电能传送到电机控制器上,电机控制器根据汽车的需要控制电机,驱动电机将电能转换为机械能,然后通过其他装置传输给车轮,车轮克服阻力带动车辆行驶㊂对于具有制动能量回收功能的纯电动汽车,在制动时,部分能量通过车轮传递到驱动电机上,电机将机械能转化为电能,并将其传输到电池中进行储能㊂在这种情况下电机发挥发电机的作用㊂此外,为了保持低压系统的正常运行,电池管理系统会根据是否缺少12V低压电池,通过D C/D C转换器对部分电池进行充电,并通过电池为低压系统供电[4]㊂从蓄电池充电到驱动车轮运行,纯电动汽车的能量走向可以概括为:充电桩 车载充电机 蓄电池 电流 电力调节器 电动机 动力传动系统 驱动汽车行驶㊂在这整个能量传递过程中,主要存在着电能和机械能的转换及消耗㊂图1为纯电动汽车能量流动情况,其中动力电池㊁电机等部件构成电动车的传动系统,它是一个复杂的多非线性因素耦合系统[5]㊂本文利用软件搭建电动车传动系统,研究了不同工况下动力传动系统的能量损耗,为后续研究提供了参考㊂图1纯电动汽车能量流F i g.1E n e r g y f l o wo f p u r ee l e c t r i cv e h i c l e s1.2动力传动系统模型介绍及参数设置纯电动车的动力传动系统模型主要包含驾驶员模型㊁动力电池模型㊁电机模型㊁车辆模型㊁整车控制模型等[6]㊂动力传动系统模型的参数输入主要根据实车参数和试验结果,以便于后续研究的参考㊂1)驾驶员模型㊂在软件中的I F PD r i v e模型库中,根据建模需求和特点,选择驾驶员模型中的D R V D R V A01B子模型,其内部自带P I D控制器㊂驾驶员模型可以联和V C U整车控制单元通过对比目标车速与实际车速来控制加速和制动信号[7]㊂控制原理如下:ΔV=V t a r g e t-V r e h;(1)S a c c=G P a c cΔV+G I a c cʏΔV d t+G A a c c d V t a r g e t;(2)S b r a k=-G P b r a kΔV-G I b r a kʏΔV d t-G A b r a k d V t a r g e t㊂(3)式中:S a c c为加速信号;S b r a k为制动信号;V t a r g e t为目标车速;V r e h为实际车速;G为车辆质量;P a c c㊁I a c c㊁A a c c 分别为加速控制的P I D增益系数;P b r a k㊁I b r a k㊁A b r a k分别为制动控制的P I D增益系数,t为时间㊂2)动力电池模型㊂本文选取的是D R V B A T001电池模型,这是电池模型的一类子型号,这种电池是由电池组串联或并联而成的㊂电池的输出电压可用以下公式进行计算:U o u t =U o -R I ㊂(4)式中:U o u t 为电池输出电压;U o 为电池开路电压;R 为等效电阻;I 为输入电流㊂在变电压情况下,它包括一个内阻模型㊂需要实验数据来描述开路电压和内阻㊂开路电压和内阻取决于温度和电池S O C ㊂其中电池S O C (又称电池荷电状态)值计算公式如下:d V S O C d t =-I 100C n o m ㊂(5)式中C n o m 为电池额定容量㊂3)电机模型㊂纯电动汽车传动系统中电机为整车提供动力,是电动汽车的核心㊂其将电能转换为机械能的过程中有一定的能量损失㊂本文选用D R V E M 02-电机模型,它是一个带有变频器的电动机模型㊂其输出转矩和功率损耗可以通过数据文件或特征参数来确定㊂电机输出的扭矩限制条件如下:T m i n ɤT ɤT m a x ㊂(6)式中:T m i n 为电机最小扭矩;T m a x 最大扭矩㊂4)车辆模型㊂与传统汽车相比,纯电动汽车最大的变化是它的动力系统,用动力电池和驱动电机取代了传统发动机㊂汽车上的其他系统,如车身㊁方向盘和悬架等,基本上维持了传统的运行原理和结构[8]㊂类似的原理和结构使得电动车具有与传统汽车相同的行驶阻力,研究方法和过程也大致相同㊂由汽车理论可知,车辆行驶时受到总的阻力为ðF =F f +F i +F w +F j ㊂(7)式中:F f 为滚动阻力,N ;F i 为坡度阻力,N ;F w 为空气阻力,N ;F j 为加速阻力,N ㊂则电动车驱动力-行驶阻力的平衡方程为F d =F f +F i +F w +F j(8)或T t q i g i o ηT r =G f +G i +C D A u 2a 21.15+δm d u d t ㊂(9)式中:F d 为车辆行驶需求驱动力,N ;T t q 为驱动电机转矩,N ㊃m ;i g 为变速器传动比;i o 为主减速器传动比;ηT 为传动效率;r 为车轮半径;G 为汽车所受重力,N ;f 为滚动阻力系数;i 为坡度;C D 为风阻系数;A 为迎风面积,m 2;u a 为车速,k m ㊃h -1;δ为旋转质量换算系数;m 为汽车质量,k g ;d u d t 为加速度,m ㊃s -2㊂本文选用D R V V E H 02-车辆模型,这是车辆的一个子模型㊂5)整车控制器模型㊂整车控制器(V C U )包括4个模块,有输入㊁输出信号传输模块㊁驱动控制策略模块㊁制动控制模块㊂整车控制器模型是纯电动汽车动力传动系统建模的核心,本文选用D R V V C U E 03-电动汽车控制单元模型,图2是它的驱动程序命令,它是使用来自驾驶员的加速和制动命令计算扭矩的㊂图2 V C U 制动策略F i g .2 V C Ub r a k i n g s t r a t e g y1.3 动力传动系统模型的建立在动力传动系统模型的搭建过程中,暂不考虑电机和动力电池等部件的热特性,因此把热接口都设置成定值[910]㊂动力传动系统模型如图3所示,主要包括驾驶员模型㊁整车控制器模型㊁传动系统模型㊁电驱系统模型等㊂351第2期 王楷焱等:某纯电动汽车动力系统能量仿真分析图3动力传动系统模型F i g.3D r i v e t r a i nm o d e l2模型仿真分析设置仿真工况为N E D C循环工况,环境温度为25ħ,车辆总质量为1206k g,车辆最大制动力矩为1000N m,电机扭矩范围为-208~208N m,仿真时间为1180s㊂车辆控制单元(V C U)分析驾驶员的输入(加速和制动),并命令电机和车辆制动㊂对于制动指令,V C U可以命令电动机作为发电装置为电池充电㊂V C U对制动回收的控制策略是:当S O C值低于89%时,V C U授权制动再生,电机用于制动车辆和充电;当S O C值高于95%时,不授权制动再生㊂电机转速小于69r㊃m i n-1时,V C U不授权制动再生,电机转速大于71r㊃m i n-1时,授权制动再生㊂开始行驶时制动力矩仅由车辆制动器提供,当电机转速到达设定值后将制动扭矩分成2部分:车辆制动扭矩为60%,电机扭矩为40%㊂图4表示在开始阶段电池S O C值低于95%,此时处于低阈值状态,V C U会授权制动再生;当S O C 值高于95%时,即高阈值状态,不再进行制动能量回收;S O C值低于89%时,再次回到低阈值状态, V C U再次授权制动再生,一直到S O C值为95%以上时停止授权㊂图5表示初始阶段电机转速较低,此时电机转速处于低阈值状态,没有制动回收㊂当电机转速达到71r㊃m i n-1,达到高阈值状态,V C U授权制动回收;当电机转速低于69r㊃m i n-1时,停止制动回收,直到电机转速再次达到71r㊃m i n-1时,V C U会启用制动再生㊂图4S O C阈值F i g.4T h r e s h o l do f S O C图5电机转速阈值F i g.5M o t o r s p e e d t h r e s h o l d451沈阳大学学报(自然科学版)第35卷选择齿轮传动比的时候考虑其爬坡能力,传动比越大其爬坡能力越强,图6可以看出汽车运行相同的时间,传动比为5时,电池S O C 值下降最慢,传动比为8时,S O C 值下降最快;制动时,传动比为7和8的回收量大致相同,传动比为5的回收效率最好,传动比为6时回收效率最差㊂图7表示的是不同的传动比下的电机输入到汽车的转速,当传动比为8时,转速曲线已经有明显的变形,传动比为5㊁6和7时,转速曲线大致相同㊂结合图6考虑,在实际操作中,传动比选择5㊂图6 电池S O C F i g .6 S O Co f b a t t e r y 图7 输入转速F i g .7 R o t a t i o n a l s p e e do f i n pu t 图8表示的是相同条件下汽车质量不同时对电池S O C 的影响㊂开始运行时各种质量的汽车其电池S O C 值下降情况大致相同,运行时间越长差距越明显,汽车质量越小S O C 值下降得越慢,经济性越好且随着工况运行对电池S O C 的影响越大㊂实验中要以真实情况为准㊂图9表示的是风速对电池S O C 的影响,设置运行时长10000s ㊂起始阶段,各工况运行差异不大,运行到1000s 时开始出现明显差异㊂无风(风速为0m ㊃s -1)状态下,电池S O C 使用情况是最优的㊂三级风(风速为3.4~5.4m ㊃s -1)时,电池S O C 下降状态明显,运行期间S O C 值下降约91%,而无风工况下运行S O C 值只下降约70.5%,风速对电池S O C 的使用有较大影响㊂图8 汽车质量对S O C 的影响F i g .8 E f f e c t o f v e h i c l ew e i g h t o nS O C 图9 风速对S O C 的影响F i g .9 E f f e c t o fw i n d s pe e do nS O C 3 结 论本文中用仿真软件搭建了纯电动汽车动力传动模型并且设置相关参数,提出了电池S O C 在不同电量下的V C U 对制动回收的控制以及在电机不同转速下V C U 对制动回收的控制,对比了不同影响因素下汽车输入转速和电池S O C 的情况,得到以下结论:1)传动比为5时,电池使用情况最优且转速曲线符合实际曲线,传动比为6时,能量回收效果最差;传动比为8时,转速曲线已经有明显的变形且电池S O C 使用情况较差㊂2)汽车总质量越小,行驶中电池S O C 值下降越慢且差异性变化明显㊂3)速度保持不变的情况下,无风状态时电池S O C 下降最慢;随着风力增大,S O C 下降增大㊂随着551第2期 王楷焱等:某纯电动汽车动力系统能量仿真分析651沈阳大学学报(自然科学版)第35卷运行时长增加,无风和三级风对电池S O C的影响体现出较大差异㊂从S O C值的变化和车速可以计算出汽车的行驶里程,当S O C值从90%到10%时,汽车的行驶距离约为133k m㊂通过该仿真分析可以直观的看到能量传输情况,也可以监测整个动力传动系统的能量回收情况,为实现整车系统最优控制和降低车辆能耗提供帮助㊂参考文献:[1]李渝丽.基于轮毂电机的纯电动汽车动力系统匹配研究[D].太原:中北大学,2020.L IY L.R e s e a r c ho n p o w e r t r a i n m a t c h i n g o f p u r ee l e c t r i cv e h i c l eb a s e do nh u b m o t o r[D].T a i y u a n:N o r t h U n i v e r s i t y o fC h i n a,2020.[2]沈童.面向极限工况的分布式驱动电动汽车纵横协同控制研究[D].南京:东南大学,2021.S H E N T.R e s e a r c h o nl o n g i t u d i n a la n dl a t e r a lc o o r d i n a t i v e c o n t r o lf o r d i s t r i b u t e d d r i v i n g e l e c t r i c v e h i c l e u n d e re x t r e m ec o nd i t i o n[D].N a n j i n g:S o u t he a s tU n i v e r s i t y,2021.[3]徐金波.纯电动汽车驱动控制策略与能量管理策略分析[D].西安:长安大学,2019.X UJB.A n a l y s i so fd r i v ec o n t r o ls t r a t e g y a n de n e r g y m a n a g e m e n ts t r a t e g y f o r p u r ee l e c t r i cv e h i c l e[D].X i a n:C h a n g a n U n i v e r s i t y,2019.[4]陈挺.一种新能源船混合动力电源管理系统设计与实现[D].海口:海南大学,2021.C H E N T.D e s i g na n di m p l e m e n t a t i o no fah y b r i d p o w e r m a n a g e m e n ts y s t e m f o ran e w e n e r g y s h i p[D].H a i k o u:H a i n a nU n i v e r s i t y,2021.[5]张元元.电动车传动系扭转振动主动控制研究综述[J].科学技术创新,2017(26):1718.Z HA N G Y Y.A r e v i e w o fr e s e a r c ho na c t i v ec o n t r o lo ft o r s i o n a lv i b r a t i o no fe l e c t r i cv e h i c l ed r i v e t r a i n[J].S c i e n t i f i ca n d T e c h n o l o g i c a l I n n o v a t i o n,2017(26):1718.[6]陈红爱.纯电动汽车的能量流仿真及能耗分析[D].重庆:重庆理工大学,2021.C H E N H A.E n e r g y f l o w s i m u l a t i o na n de n e r g y c o n s u m p t i o na n a l y s i so f p u r ee l e c t r i cv e h i c l e s[D].C h o n g q i n g:C h o n g q i n gU n i v e r s i t y o fT e c h n o l o g y,2021.[7]陆训,刘敏,汪跃中,等.纯电动汽车能量管理仿真分析研究[J].汽车电器,2019(8):1923.L U X,L I U M,WA N G YZ,e t a l.S i m u l a t i o na n a l y s i so f b a t t e r y e l e c t r i cV e h i c l eE n e r g y m a n a g e m e n t[J].A u t oE l e c t r i cP a r t s, 2019(8):1923.[8]董浩.基于能量流测试与仿真的汽油混合动力系统节能研究[D].长沙:湖南大学,2021.D O N G H.R e s e a r c h o n e n e r g y c o n s e r v a t i o n o f g a s o l i n e h y b r i d p o w e r s y s t e mb a s e d o n e n e r g y f l o we x p e r i m e n t a n d s i m u l a t i o n[D].C h a n g s h a:H u n a nU n i v e r s i t y,2021.[9]S H R I V A S T A V A R,P O R R A SAF,A L L E N DB.E l e c t r i f i e dv e h i c l e t h e r m a lm a n a g e m e n t s y s t e m:U S20200231024[P].20200723.[10]陆训,汪跃中,张朝闻.基于AM E s i m纯电动汽车高温适应性分析研究[J].汽车实用技术,2019(5):2931.L U X,WA N G Y Z,Z H A N G C W.S t u d y o nh i g ht e m p e r a t u r ea d a p t a b i l i t y o fe l e c t r i cv e h i c l eb a s e do n A m e s i m s o f t w a r e[J].A u t o m o b i l eA p p l i e dT e c h n o l o g y,2019(5):2931.ʌ责任编辑:肖景魁ɔ。
1 2 3 4 51 结构及工作原理1.1 结构组成多合一电驱动系统由EM,G-BOX,IPU,DCDC,OBC,HV-BOX,VCU,ACP,PUMP共9部分组成,如图1所示。
整体采用四段式结构,分别为减速器左端盖、减速器右端盖、电机定子壳体、电机后端盖,其中减速器右端盖为电机和减速器共用端盖,ACP固定在电机左端盖上,PUMP 固定在电机右端盖上。
IPU,DCDC,OBC,HV-BOX,VCU布置在控制器系统壳体中,DCDC,OBC布置在同一层,称之为电源层;HV-BOX和IPU,VCU布置在同一层,称之为电机控制层,电源层和电机控制层共同组成控制器系统,布置在EM正上方。
该多合一电驱动系统为原有长安量产的三合一电驱动系统和电源系统的进一步集成产品,提高了能量密度和冷却效率。
图1 多合一电驱动系统三维数模该多合一电驱动系统的系统原理图如图2所示,主要包括高压电传输、低压电信号传输、热量交换、动力传递等,其中高压电包括高压直流电、高压交流电、家用220 V交流电;低压电信号包括12 V直流电信号、CAN信号、高压互锁信号、电子锁位置信号、制动踏板位置信号等共62个电信号。
图2 多合一电驱动系统原理简图动力电池输出高压直流电,经过HV-BOX中叠层铜排将高压直流电分配成4部分,包括控制器系统内部IPU中的INV 功率模块、DCDC模块,外部的ACP,PTC。
INV功率模块将高压直流电转换成高压交流电输送到EM,驱动EM旋转;DCDC模块将高压直流电转换成低压直流电输送给12 V蓄电池,实现对12 V蓄电池进行动态充电,12 V蓄电池输出低压直流电给IPU中的INV控制模块和VCU控制模块。
OBC模块经过HV-BOX中叠层铜排与动力电池相连,OBC 可将输入的家用220 V交流电转换成高压直流电,输入到动力电池中,此过程为动力电池慢充过程。
该电驱动系统的冷却水路、PUMP和电驱动系统外部的冷却控制系统可组成封闭的回路。
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模一、本文概述随着电动汽车技术的快速发展,分布式驱动电动汽车(Distributed Drive Electric Vehicles, DDEV)因其高效能源利用、优越操控性能以及灵活的驱动方式,正逐渐成为新能源汽车领域的研究热点。
为了更深入地理解和研究DDEV的动态特性与控制策略,建立精确的车辆模型是关键。
本文旨在探讨基于Carsim与Simulink 联合仿真的分布式驱动电动汽车建模方法,以期在车辆动力学建模、控制策略优化和系统集成等方面提供有效的技术支撑。
本文首先介绍分布式驱动电动汽车的基本结构和特点,阐述其相较于传统车辆的优势。
随后,详细介绍Carsim和Simulink两款软件在车辆建模和仿真分析方面的功能和特点,以及它们联合仿真的优势。
接着,将重点介绍如何利用Carsim建立DDEV的车辆动力学模型,包括车辆动力学方程、轮胎模型、驱动系统模型等。
将探讨如何利用Simulink构建DDEV的控制策略模型,包括驱动控制、制动控制、稳定性控制等。
在建立了DDEV的车辆动力学模型和控制策略模型后,本文将详细阐述如何将这两个模型进行联合仿真,并分析仿真结果。
通过对比分析不同控制策略下的车辆性能表现,验证所建模型的准确性和有效性。
本文还将讨论分布式驱动电动汽车建模面临的挑战和未来的研究方向,为相关领域的研究者提供参考和借鉴。
二、Carsim软件介绍Carsim是一款由密歇根大学开发的高级车辆动力学仿真软件,广泛应用于车辆控制、车辆动力学、主动和被动安全、电动和混合动力车辆以及先进的驾驶员辅助系统等领域的研究和开发。
该软件以模块化的方式集成了车辆各个子系统的动力学模型,包括发动机、传动系统、制动系统、转向系统、悬挂系统、轮胎以及车身等。
Carsim的核心优势在于其强大的物理引擎和精确的仿真能力。
通过精确的算法和详尽的车辆参数数据库,Carsim能够模拟出车辆在各种道路条件和驾驶操作下的动态行为,如加速、制动、转向、侧滑等。
科技风2021年6月机械化工DO/10.19392/kd1671-7341.202117075纯电动汽车动力系统参数匹配及仿真研究韩宁梁作华刘婷聊城职业技术学院山东聊城252000摘要:纯电动汽车动力系统参数匹配及仿真研究是其设计开发中的一个重要环节,主要工作是根据预设的电动汽车性能指标,对动力系统的主要部件进行选型,以及动力参数的匹配和仿真,本文利用电动汽车仿真软件ADVISOR进行仿真,根据仿真结果,对纯电动汽车进行动力性和经济性分析,仿真数据显示所匹配的动力系统参数基本满足设计要求。
关键词:纯电动汽车;动力系统;ADVISOR;仿真尽管汽车为人类现代生活提供了巨大的方便,但随着汽车数量的逐年增加,也造成了巨大的能源和环境问题。
纯电动汽车是以可充电电池作为动力源,由电机驱动,因此其具有环保无污染、噪声低、能源利用率高等显著特点,在能源环境问题日益严峻的今天逐渐受到了汽车行业的重视。
纯电动汽车动力系统参数匹配主要是指在满足整车动力性和经济性的基本要求下,合理匹配动力系统中各部件的类型和参数。
纯电动汽车动力系统相关参数的设计与匹配对整车性能有着非常显著的影响,合理的参数匹配可以有效地改善纯电动汽车在各种工况下行驶时的性能。
1纯电动汽车动力系统参数的匹配设计1.1纯电动汽车的性能指标根据国家标准GB28382-2012、GB18385-2001以及GB18386-2001中对纯电动汽车的动力性能、经济性能的相关技术要求,本论文提出了某纯电动汽车的基本性能指标,如下表所示。
性能指标参考值最高车速>120km/h加速时间0〜50km/m加速时间<8s 0〜100km/m加速时间<15s最大爬坡度25%(车速为20km/h)续驶里程#120km(60km/h匀速行驶)1.2电机类型选择及参数匹配设计对纯电动汽车电机进行匹配主要是对电机类型进行选择,对电机功率的计算以及转矩转速的确定。
1.2.1电机的类型选择驱动电机的选择对纯电动汽车的性能有很大影响,不仅需要满足汽车运行时的基本性能,还应当满足汽车行驶时的舒适性、环境适应性等要求。