2410平台上dm9000a网卡驱动分析
- 格式:doc
- 大小:137.00 KB
- 文档页数:20
WindowsCE6.0的DM9000A流接口驱动开发谢秋金;李晓菲;李康玉;尚秋峰【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2012(12)5【摘要】针对WindowsCE系统下专用网络驱动接口开发难度大的情况,本文介绍一种基于WindowsCE流接口驱动的工作机制及开发方法。
相比于WindowsCE对各种硬件设备所提供的专用接口,流接口驱动具有更大的灵活性,且能够实现应用层到底层硬件的控制。
以含有ARMll内核的S3C6410结合以太网通信芯片DM9000A为例,逐步分析流接口驱动程序的开发流程,并利用PC 机抓取以太网通信数据,验证了流接口驱动程序开发的正确性。
%According to the difficulty of dedicated network driver interface development in Windows CE System, this paper introduces the working mechanism and development method of stream interface driver based on Windows CE. Compared to dedicated interfaces of all kinds of hardware devices provided by Windows CE, stream interface driver has strong flexibility, and it can realize the control from application layer to hardware. The development process of stream interface driver is analyzed based onS3C6410 with ARMll core and Ethernet communication chip DM9000A. Ethernet communication data from PC show the correctness of the stream interface driver development.【总页数】4页(P78-81)【作者】谢秋金;李晓菲;李康玉;尚秋峰【作者单位】华北电力大学电子与通信工程系,保定071003;华北电力大学电子与通信工程系,保定071003;华北电力大学电子与通信工程系,保定071003;华北电力大学电子与通信工程系,保定071003【正文语种】中文【中图分类】TP316【相关文献】1.基于WinCE的车载智能显示终端CAN流接口驱动开发 [J], 穆云丽;王立德;宋娟2.WinCE5.0的USB Camera流接口驱动开发 [J], 李君懿;赵利;邹柏程3.基于MicroBlaze和DM9000A的以太网接口设计 [J], 刘鸣4.基于DM9000A的DSP6711以太网接口扩展 [J], 闫法钢; 李江涛; 周晓燕5.基于STM32的DM9000A网络接口裸机的应用研究 [J], 乔有田;王俊;邵万灵;张涛因版权原因,仅展示原文概要,查看原文内容请购买。
安装网卡驱动的方法安装网卡驱动的方法可以分为以下几个步骤:1. 获取正确的网卡驱动程序。
你可以在电脑网卡的生产商官方网站上下载对应的驱动程序,也可以使用电脑自带的驱动光盘。
2. 打开设备管理器。
在Windows系统中,可以按下Win + X键,选择“设备管理器”打开设备管理器。
3. 找到网卡设备。
在设备管理器中,展开“网络适配器”类别,找到你要安装驱动的网卡设备。
4. 右键点击网卡设备,选择“更新驱动程序”。
在弹出的菜单中,选择“自动搜索更新的驱动程序软件”。
5. 如果驱动程序已经在你的电脑上,系统会自动搜索并安装最新的驱动程序。
如果没有找到合适的驱动程序,你可以选择手动安装驱动程序。
6. 手动安装驱动程序。
当系统无法自动搜索到驱动程序时,你可以选择手动安装驱动程序。
在右键点击网卡设备后,选择“更新驱动程序”,然后选择“浏览我的计算机以查找驱动程序软件”。
7. 在弹出的对话框中,选择“让我从计算机上的可用驱动程序列表中选择”。
然后点击“浏览”按钮,找到你下载好的驱动程序所在的文件夹。
8. 选择正确的驱动程序。
在弹出的可选驱动程序列表中,选择你下载好的驱动程序,点击“下一步”进行安装。
9. 等待驱动程序安装完成。
系统会自动安装驱动程序,你只需要按照提示进行操作。
安装完成后,网卡设备应该被正确识别和驱动。
10. 重启电脑。
驱动程序的安装可能需要重启电脑,以确保驱动程序的正常运行。
安装完成后,你的网卡设备应该能够正常工作了。
如果仍然有问题,可以尝试重新安装驱动程序或者更新系统。
自己编写bootloaderbootloader从flash上把bootloader读取内存(包括有flash的读写、初始化内存SDRAM、同时也会初始化时钟,关闭看门口,启动则就是地址跳转,设置参数)最简单的bootloader1.关看门狗,设置时钟、设置SDRAM、设置NAND FLASH,2.把内核从NAND FLASH(开发板配置的nor flash比较小,没法写入内核)3.设置要传给内核的参数4.跳转执行U-boot制作从start.s文件开始分析。
下载下来的u-boot只有s3c2410,所以需要自己修改1.把board(单板)下面的2410拷贝成2440.2.拷贝配置文件,在include-configs把smdk2410_config.h拷贝成smdk2440_config.h3.如果此时make smdk2440_config,会提示没有规则的错误,需要修改其他文件4.搜索带smdk2410内容的文件grep“smdk2410”*-nR---可以看到boads.cfg中有相关内容,模仿2410来写。
5.修改过后,就可以make了。
编译通过后,进行调试,看什么地方出错。
1.在sourceinsight中添加新添加的内容。
2.分析错误,根据启动流程一步一步的进行。
3.start.s里面一些初始化代码修改,用之前裸机写的代码来替换部分初始化。
4.串口乱码,发现在get_HCLK里面没有定义config_s3c2440U-BOOT移植1.在http://www.denx.de/wiki/U-Boot/SourceCode中下载最新u-boot2.放入服务器/work/system目录下。
3.解压u-boot。
4.同时也在window下解压出来,建立sourceinsiged工程。
5.sourceinsiged中先把所有加入,然后把board中只保留summary的2410,Arch目录下只保留Arch/arm/cpu/arm920t(因为2440用的arm920t)6.在根目录下执行make smdk2410_config(配置)7.编译,执行make(全局编译)8.编译不能通过,有可能是编译器版本比较低的缘故。
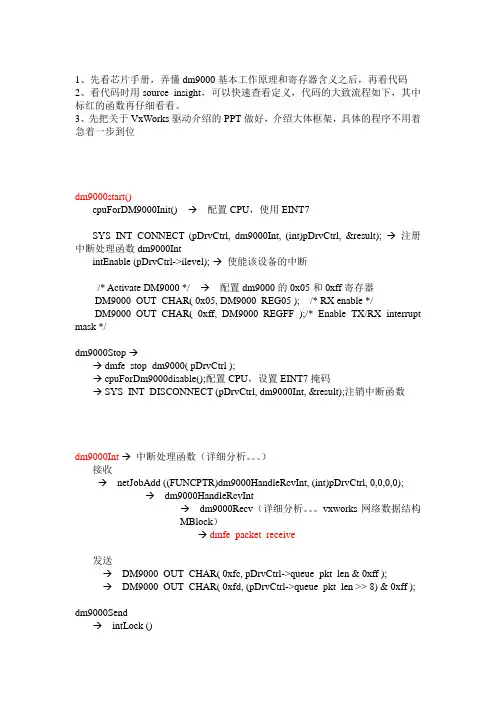
1、先看芯片手册,弄懂dm9000基本工作原理和寄存器含义之后,再看代码2、看代码时用source insight,可以快速查看定义,代码的大致流程如下,其中标红的函数再仔细看看。
3、先把关于VxWorks驱动介绍的PPT做好,介绍大体框架,具体的程序不用着急着一步到位dm9000start()cpuForDM9000Init() →配置CPU,使用EINT7SYS_INT_CONNECT (pDrvCtrl, dm9000Int, (int)pDrvCtrl, &result); →注册中断处理函数dm9000IntintEnable (pDrvCtrl->ilevel); →使能该设备的中断/* Activate DM9000 */ →配置dm9000的0x05和0xff寄存器DM9000_OUT_CHAR( 0x05, DM9000_REG05 ); /* RX enable */DM9000_OUT_CHAR( 0xff, DM9000_REGFF );/* Enable TX/RX interrupt mask */dm9000Stop →→ dmfe_stop_dm9000( pDrvCtrl );→ cpuForDm9000disable();配置CPU,设置EINT7掩码→ SYS_INT_DISCONNECT (pDrvCtrl, dm9000Int, &result);注销中断函数dm9000Int→中断处理函数(详细分析。
)接收→netJobAdd ((FUNCPTR)dm9000HandleRcvInt, (int)pDrvCtrl, 0,0,0,0);→dm9000HandleRcvInt→dm9000Recv(详细分析。
vxworks网络数据结构MBlock)→dmfe_packet_receive发送→DM9000_OUT_CHAR( 0xfc, pDrvCtrl->queue_pkt_len & 0xff );→DM9000_OUT_CHAR( 0xfd, (pDrvCtrl->queue_pkt_len >> 8) & 0xff ); dm9000Send→intLock ()→dmfe_start_xmit( &skb, pDrvCtrl )→intUnLock ()dm9000PollStart →启动dm9000轮询模式dm9000PollRcv →轮询方式接收数据→ dmfe_packet_receive(详细分析。
DM9000⽹卡的基本⼯作原理MAC:主要负责数据帧的创建,数据差错,检查,传送控制等。
PHY:物理接⼝收发器,当收到MAC过来的数据时,它会加上校验码,然后按照物理层的规则进⾏数据编码,再发送到传输介质上,接收过程则相反。
MII:媒体独⽴接⼝,“媒体独⽴”表明MAC⼀定情况下,任何类型的PHY设备都可以正常⼯作。
DM9000⽹卡部分函数实现:/*//实验步骤//初始化dm900//数据包发送//数据包接收*/#include "dm9000.h"#include "arp.h"#define DM_ADD (*((volatile unsigned short *)0x18000000))#define DM_DAT (*((volatile unsigned short *)0x18000004))/*Register*/#define MEM_SYS_CFG (*(volatile unsigned *)0x7E00F120)#define SROM_BW (*(volatile unsigned *)0x70000000)#define SROM_BC1 (*(volatile unsigned *)0x70000008)#define GPNCON (*(volatile unsigned *)0x7F008830) /* 中断相关寄存器 */#define EINT0CON0 (*(volatile unsigned *)0x7F008900)#define EINT0MASK (*(volatile unsigned *)0x7F008920)#define EINT0PEND (*(volatile unsigned *)0x7F008924)#define VIC0INTENABLE (*(volatile unsigned *)0x71200010)#define EINT7_VECTADDR (*(volatile unsigned *)0x71200104)#define VIC0ADDRESS *((volatile unsigned int *)0x71200f00)#define VIC1ADDRESS *((volatile unsigned int *)0x71300f00)u8 *buffer = &arpbuf;u8 host_mac_addr[6] = {0xff,0xff,0xff,0xff,0xff,0xff};u8 mac_addr[6] = {9,8,7,6,5,4};u8 ip_addr[4] = {192,168,1,113};u8 host_ip_addr[4] = {192,168,1,101};u16 packet_len;void cs_init(){// MEM_SYS_CFGSROM_BW &= (~(1<<4)); //设置位宽度SROM_BW |= (1<<4);SROM_BC1 = (0x0<<28)|(0x0<<24)|(0x7<<16)|(0x0<<12)|(0x0<<8)|(0x0<<4)|(0x0<<0); //设置时序参考uboot ok6410的⽹卡⽚选位于bank1 }void int_init() //中断初始化{GPNCON &= (~(0x3<<14));GPNCON |= (0x2<<14);// EINT0PEND &= (~(0x1<<7));// EINT0PEND |= (0x1<<7);}void dm9000_reg_write(u16 reg,u16 data){DM_ADD = reg;DM_DAT = data;}u8 dm9000_reg_read(u16 reg){DM_ADD = reg;return DM_DAT;}void dm9000_reset(){dm9000_reg_write(DM9000_GPCR, GPCR_GPIO0_OUT);dm9000_reg_write(DM9000_GPR, 0);dm9000_reg_write(DM9000_NCR, (NCR_LBK_INT_MAC | NCR_RST));dm9000_reg_write(DM9000_NCR, 0);dm9000_reg_write(DM9000_NCR, (NCR_LBK_INT_MAC | NCR_RST));dm9000_reg_write(DM9000_NCR, 0);}void dm9000_probe(void){u32 id_val;id_val = dm9000_reg_read(DM9000_VIDL);id_val |= dm9000_reg_read(DM9000_VIDH) << 8;id_val |= dm9000_reg_read(DM9000_PIDL) << 16;id_val |= dm9000_reg_read(DM9000_PIDH) << 24;if (id_val == DM9000_ID) {printf("dm9000 is found !\n");return ;} else {printf("dm9000 is not found !\n");return ;}}void dm9000_init(){u32 i;/*⽚选(独⽴芯⽚)*/cs_init();/*中断初始化*/int_init();/*设备复位操作*/dm9000_reset();/*捕获dm9000*/dm9000_probe();/*MAC初始化*//* Program operating register, only internal phy supported */dm9000_reg_write(DM9000_NCR, 0x0);/* TX Polling clear */dm9000_reg_write(DM9000_TCR, 0);/* Less 3Kb, 200us */dm9000_reg_write(DM9000_BPTR, BPTR_BPHW(3) | BPTR_JPT_600US);/* Flow Control : High/Low Water */dm9000_reg_write(DM9000_FCTR, FCTR_HWOT(3) | FCTR_LWOT(8));/* SH FIXME: This looks strange! Flow Control */dm9000_reg_write(DM9000_FCR, 0x0);/* Special Mode */dm9000_reg_write(DM9000_SMCR, 0);/* clear TX status */dm9000_reg_write(DM9000_NSR, NSR_WAKEST | NSR_TX2END | NSR_TX1END);/* Clear interrupt status */dm9000_reg_write(DM9000_ISR, ISR_ROOS | ISR_ROS | ISR_PTS | ISR_PRS);/*填充MAC地址*/for (i = 0; i < 6; i++)dm9000_reg_write(DM9000_PAR+i, mac_addr[i]);/*激活DM9000*/dm9000_reg_write(DM9000_RCR, RCR_DIS_LONG | RCR_DIS_CRC | RCR_RXEN);/* Enable TX/RX interrupt mask */dm9000_reg_write(DM9000_IMR, IMR_PAR);}void dm9000_tx(u8 *data,u32 length){u32 i;/*禁⽌中断*/dm9000_reg_write(DM9000_IMR,0x80);/*写⼊发送数据的长度*/dm9000_reg_write(DM9000_TXPLL, length & 0xff);dm9000_reg_write(DM9000_TXPLH, (length >> 8) & 0xff);/*写⼊待发送的数据*/DM_ADD = DM9000_MWCMD; // MWCMD是DM9000内部SRAM的DMA指针,根据处理器模式,写后⾃动增加for(i=0;i<length;i+=2){DM_DAT = data[i] | (data[i+1]<<8); //低8 ⾼8}/*启动发送*/dm9000_reg_write(DM9000_TCR, TCR_TXREQ);/*等待发送结束*/while(1){u8 status;status = dm9000_reg_read(DM9000_TCR);if((status&0x01)==0x00)break;}/*清除发送状态*/dm9000_reg_write(DM9000_NSR,0x2c);/*恢复中断使能*/dm9000_reg_write(DM9000_IMR,0x81);// printf("dm9000_tx");}#define PTK_MAX_LEN 1522u32 dm9000_rx(u8 *data){u8 status,len;u16 tmp;u32 i;/*判断是否产⽣中断,且清除*/if(dm9000_reg_read(DM9000_ISR) & 0x01)dm9000_reg_write(DM9000_ISR,0x01);elsereturn0;/*空读*/dm9000_reg_read(DM9000_MRCMDX);/*读取状态*/status = dm9000_reg_read(DM9000_MRCMD);/*读取包长度*/len = DM_DAT;/*读取包数据*/if(len<PTK_MAX_LEN){for(i=0;i<len;i+=2){tmp = DM_DAT;data[i] = tmp & 0x0ff;data[i+1] = (tmp>>8)&0x0ff; }}return len;}。
基于RTEMS的网络驱动程序设计【摘要】网络互联已深入多个领域,而RTEMS实时操作系统对网络设备的支持却明显不足。
为添加RTEMS对网络的支持,充分利用RTEMS的性能。
首先对RTEMS网络设备驱动的运行机理进行了分析,介绍了网络设备驱动开发的框架。
然后在RTEMS平台中实现DM9000A网络接口卡驱动,结合网络驱动的实例重点分析了RTEMS系统下网路驱动程序的开发方法。
最后使得DM9000A 在RTEMS平台下能够正常编译,且通过实验来验证实现的可行性和有效性。
【关键词】RTEMS;实时系统;DM9000A网络接口卡;网络驱动1.引言RTEMS(Real-Time Executive for Multiprocessor Systems)是一个开放源代码的实时嵌入式操作系统,对各类主流的嵌入式平台都有良好的支持[1]。
为了添加RTEMS平台的网络应用功能,需要设计出合理的网络设备驱动程序。
为了满足RTEMS平台的驱动模型,必须对其组织组织框架有所理解。
由于RTEMS是开源的,这使得可以对其网络驱动模块部分进行分析和移植以满足不同的应用需求。
本文通过对RTEMS网络源码的分析,并结合DM9000A驱动的实例,探讨了如何为RTEMS添加网络驱动。
2.RTEMS的网络模块RTEMS网络栈基于BSD,并提供了绝大部分BSD的网络服务。
网络应用程序通过套接字(socket)接口来实现本地及网络设备间的通信。
应用程序通过网络模块与底层驱动进行交互,是无法直接访问网络设备的。
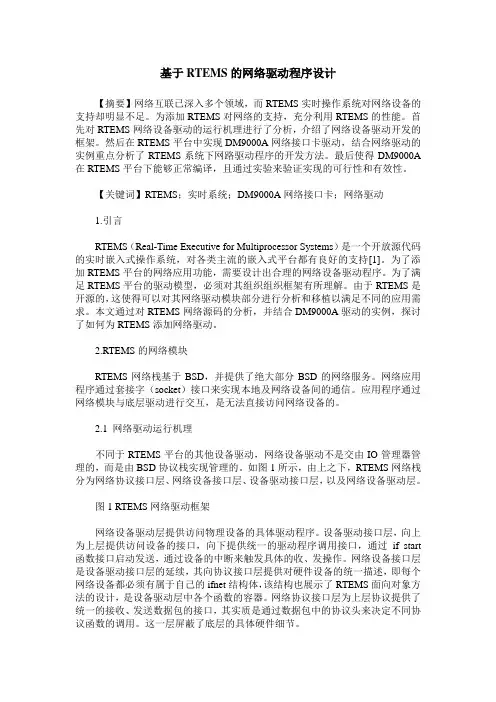
2.1 网络驱动运行机理不同于RTEMS平台的其他设备驱动,网络设备驱动不是交由IO管理器管理的,而是由BSD协议栈实现管理的。
如图1所示,由上之下,RTEMS网络栈分为网络协议接口层、网络设备接口层、设备驱动接口层,以及网络设备驱动层。
图1 RTEMS网络驱动框架网络设备驱动层提供访问物理设备的具体驱动程序。
设备驱动接口层,向上为上层提供访问设备的接口,向下提供统一的驱动程序调用接口,通过if_start 函数接口启动发送,通过设备的中断来触发具体的收、发操作。
基于DM9000A和LPC2214的嵌入式以太网接口设计排行榜收藏打印发给朋友举报来源:elenchina 发布者:刘伟明、杜林热度8票浏览180次【共0条评论】【我要评论】时间:2009年6月08日16:34引言互联网的迅速发展使得网络用户呈指数增长,在使用计算机进行网络互联的同时,各种家电设备、仪器仪表以及工业生产中的数据采集与控制设备也在逐步地走向网络化,以便共享网络中庞大的信息资源。
以太网技术以其灵活方便的连接方式、良好的开放性、高效、低廉等优点,已经广泛地应用于各种计算机网络,并且还在不断地发展。
目前基于以太网的新技术和联网设备不断出现,以太网已经成为事实上最常用的网络标准之一。
以太网控制芯片是以太网接口的核心器件,其性能是影响网络性能的关键的因素之一,如何正确使用网络控制器是设计以太网接口的关键。
本文介绍了一种以高性能的以太网控制芯片DM9000A和32位ARM处理器LPC2214为核心的嵌入式以太网接口的实现方法。
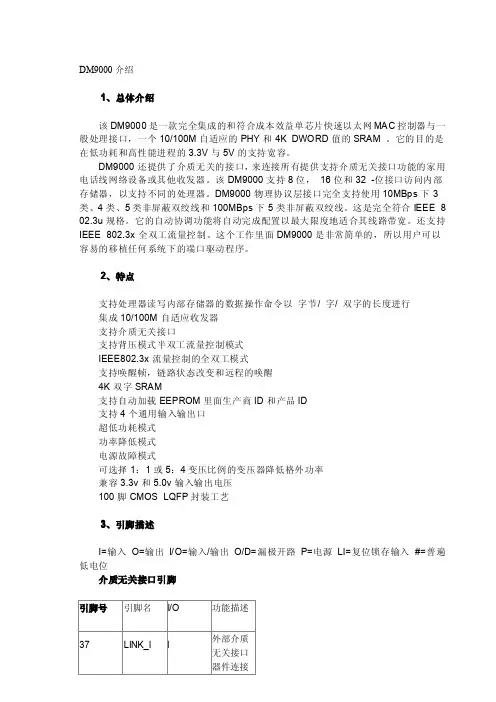
1、以太网控制器DM9000A介绍DM9000A是DA VICOM公司推出的一种高度集成、功能强大、少引脚、性价比高的单片快速以太网控制芯片,非常适用于嵌入式系统设计。
图1为DM9000A内部结构框图。
DM9000A具有一个通用的微处理器接口,内部集成了16kB SRAM(其中13kB用作接收缓冲区,3kB作为发送缓冲区),对内部存储器访问支持8位和16位数据接口以适用于不同的微处理器;内部集成了一个10/100M自适应PHY,可以连接到3类、4类、5类的10M无屏蔽双绞线和5类的100M无屏蔽双绞线。
图1 DM9000A内部结构框图DM9000A体积小,只有48个引脚,有利于缩小PCB面积;它完全支持IEEE802.3u规格,还支持IEEE802.3x全双工流控制。
DM9000A功耗非常低,单电源3.3V工作,内置 3.3V 变2.5V电源电路,I/O端口支持3.3V到5V的容差。
JZ2440学习笔记Chili2015.5前言本人入手JZ2440半个月,以前未接触过linux,但在校接触过许多不跑linux系统的CPU,具有LPC1114,LPC1343,STM32,blackfin等处理器的编程经验,对微处理器的原理以及运行方式具有一定的了解。
靠着这点小经验,以及新学习的知识,自己动手移植了最新的uboot,绝对原创,得益于韦老师的书籍以及开发板,能让我们这个小白可以踏进linux的世界,但本人毕竟在linux方面只是个类似小白的学生,许多不对之处,希望大家不吝指教!说明:阅读本文需要一点的ARM以及S3C2440的基础知识,建议先阅读《嵌入式Linux应用开发完全手册》,此书对对ARM以及JZ2440有很好的介绍和说明,在阅读中有不懂的也可以再去翻看此书,查漏补缺。
JZ2440移植最新u-boot-2015.04-rc4.tar1,配置uboot去官网下载最新uboot源代码u-boot-2015.04-rc4.tar,开发环境采用JZ2440光盘上的vmware 虚拟机ubuntu9.10。
本次采用smdk2410的默认配置来配置uboot,然后启动类似linux一样的menuconfig菜单进行配置,然后make,并烧写进JZ2440看效果,然后根据现象一步步修改。
我们移植uboot的基本原则是:因为我们刚上手,可能什么都不知道,更加不知需要更改什么,这个时候我们就先尽量什么都不改,直接烧写进去看现象,然后根据现象或者提示信息一步步更改,从而移植完成。
配置命令如下:book@book-desktop:~/uboot/u-boot-2015.04-rc4$ tar jxvf u-boot-2015.04-rc4.tar.bz2book@book-desktop:~/uboot/u-boot-2015.04-rc4$ cd u-boot-2015.04-rc4/book@book-desktop:~/uboot/u-boot-2015.04-rc4$ make smdk2410_defconfigbook@book-desktop:~/uboot/u-boot-2015.04-rc4$ make menuconfig3,在uboot根目录执行book@book-desktop:~/uboot/u-boot-2015.04-rc4$ make报错:cc1: error: bad value (armv4) for -march= switchcc1: error: bad value (armv4) for -mtune= switchmake[2]: *** [include/autoconf.mk] Error 1make[1]: *** [silentoldconfig] Error 1make: *** No rule to make target `include/config/auto.conf', needed by `include/config/uboot.release'. Stop.错误并不可怕,学会看错误提示,根据提示进行下一步工作。
u_boot移植(八)之支持dm9000网卡续上一节,我们移植dm9000网卡,最后以失败而告终,但是不能放弃,很多时候成功就离我们一步之隔,只要我们跨过这一步,我们就能成功。
先分析一下,失败的原因,从提示信息就可以知道,是在复位DM9000网卡没有应答,读取的ID不正确。
为什么会导致读取ID不正确呢?正常情况应该不会的,因为我们可以肯定DM9000网卡驱动肯定不会有问题,现在出了这样的错误,肯定是我们S5PC100这边还有相关控制器没有配置。
对了,我们的DM9000AE网卡是接在了S5PC100 SMC的BANK1上,由SMC控制器最终来控制DM9000AE网卡的时序。
我们没有初始化SMC控制器,也没有初始化DM9000AE接到S5PC100的相应GPIO引脚。
好,接下来我们就来完成S5PC100的SMC控制器设置 和 初始化S5PC100上和DM9000相连接的GPIO管脚。
一、初始化S5PC100的相关GPIO引脚和SMC控制器1.初始化S5PC100上和DM9000相连接的GPIO管脚从上图可以知道,我们只需将GPK0组的第1、6、7管脚设为对应的工作模式就可以了。
初始化代码如下:2 . 5PC100的SMC控制器设置S5PC100的SMC控制器主要有两个:SMC_BW ( SMC Bus Width & Wait control ) 和 SMC_BC(SMC Bank Control Register)。
(1)SMC_BW 控制器设置先来看看SMC总线宽度控制器的内容:从上图可以知道:<1>第4位是用来设置BANK1的位宽的,我们的DM9000AE 外接16根数据线,支持8bit和16bit工作模式。
具体是哪一种工作模式取决于它的EECS管脚 。
当EECS为低电平的时候,DM9000AE工作在16bit模式从DM9000AE的硬件接线原理图上,可以看到EECS没有接,是悬空的状态。
dm90001、总体介绍该DM9000是一款完全集成的和符合成本效益单芯片快速以太网MAC 控制器与一般处理接口,一个10/100M 自适应的PHY 和4K DWORD 值的SRAM 。
它的目的是在低功耗和高性能进程的3.3V 与5V 的支持宽容。
DM9000还提供了介质无关的接口,来连接所有提供支持介质无关接口功能的家用电话线网络设备或其他收发器。
该DM9000支持8位,16位和32-位接口访问内部存储器,以支持不同的处理器。
DM9000物理协议层接口完全支持使用10MBps 下3类、4类、5类非屏蔽双绞线和100MBps 下5类非屏蔽双绞线。
这是完全符合I EEE 802.3u 规格。
它的自动协调功能将自动完成配置以最大限度地适合其线路带宽。
还支持IEEE 802.3x 全双工流量控制。
这个工作里面DM9000是非常简单的,所以用户可以容易的移植任何系统下的端口驱动程序。
2、特点支持处理器读写内部存储器的数据操作命令以字节/字/双字的长度进行集成10/100M 自适应收发器支持介质无关接口支持背压模式半双工流量控制模式IEEE802.3x 流量控制的全双工模式支持唤醒帧,链路4K 双字SRAM支持自动加载EEPROM 里面生产商ID 和产品ID支持4个通用输入输出口超低功耗模式功率降低模式电源故障模式可选择1:1YL18-2050S,YT37-1107S 或5:4变压比例的变压器降低格外功率兼容3.3v 和5.0v 输入输出电压100脚CMOS LQFP 封装工艺3、引脚描述I=输入O=输出I/O=输入/输出O/D=漏极开路P=电源LI=复位锁存输入#=普遍低电位介质无关接口引脚引脚号引脚名I/O功能描述37LINK_I I外部介质无关接口器件连接状态38、39、40、41RXD[3:0]I外部介质无关接口接收数据4位半字节输入(同步于接收时钟)43CRS I/O外部介质无关接口的载波检测44COL I/O外部介质无关接口的冲突检测,输出到外部设备45RX_DV I外部介质无关接口数据有效信号46RX_ER I外部介质无关接口接收错误47RX_CLK I外部介质无关接口接收时钟49TX_CLK I/O外部介质无关接口发送时钟50~53TXD[3:0]O外部介质无关接口发送数据低4位输出TXD[2:0]决定内部存储空间基址:TXD[2:0])*10H+300H54MDIO I/O外部介质无关接口串行数据通信57MDC O外部介质无关串行数据通信口时钟,且与中断引脚有关该引脚高电平时候,中断引脚低电平有效;否则高有效注意:以上介质无关端口都内部自带60K欧姆的下拉电阻处理器接口引脚1IOR#I处理器读命令低电平有效,极性能够被EEPROM修改,详细请参考对EEPROM内容的描述2IOW#I处理器写命令低电平有效,同样能修改极性3AEN#I芯片选择,低电平有效4IOWAIT O处理器命令就绪当上一指令没有结束,该引脚电平拉低表示当前指令需要等待14RST I硬件复位信号,高电平有效复位1~682~89SD0~15I/O0~15位的数据地址复用总线,由CMD引脚决定当期访问类型93~98SA4~9I地址线4~9;仅作芯片选择信号(SA4~9:TXD0~2,011)被选中92CMD I访问类型高电平是访问数据端口;低电平是访问地址端口91IO16O字命令标志,默认低电平有效当访问外部数据存储器是字或双字宽度时,被置位100INT O中断请求信号高电平有效,极性能修改37~5356SD31~16I/O双字模式,高16位数据引脚57IO32O双字命令标志,默认低电平有效注意:以上引脚除去SD8,SD9和IO16,都内部自带60K欧姆的下拉电阻EEPROM引脚64EEDI I数据输入引脚65EEDO I/O EEPROM数据引脚与WAKEUP引脚一起定义访问数据存储器的总线宽度WAKEUP EEDO总线宽度0016位0132位108位11未定义66EECK I时钟信号67EECS I/O片选也做LED模式选择引脚高电平时,LED模式1,否则模式注意:EECS EECK EEDO引脚都内部自带60K欧姆下拉电阻时钟引脚21X2_25M O25M晶振输出22X1_25M I25M晶振输入59CLK20MO O20M晶振再生输出给外部介质无关设备,自带60K欧姆下拉电阻LED引脚60SPEED100#O低电平指示100M带宽指示,高电平指示10M带宽61DUP#O全双工指示LEDLED模式0时,低电平显示工作在10M带宽,或在100M带宽浮动62LINK&ACT#O连接LED,在模式0时,只作物理层的载波监听检测连接状态10/100物理层与光纤接口24SD I光纤信号检测PECL电平信号,显示光纤接收是否有效25DGGND P带隙地信号线26BGRES I/O带隙引脚27AVDD P带隙与电源保护环28AVDD P接收端口电源29RXI+I物理层接收端的正极30RXI-I物理层接收端的负极31AGND P接收端口地32AGND P发送端口地33TXO+O物理层发送端口正极34TXO-O发送端口负极35AVDD P物理层发送端口负极各种其他功能引脚16~19TEST1~4I工作模式Test1~4(1,1,0,0)正常工作状态48TEST5I必须接地68~69GPIO0~3I/O通用I/O端口通用端口控制寄存器和通用端口寄存器能编程该系列引脚GPIO0默认输出为高来关闭物理层和其他外部介质无关器件GPIO1~3默认为输入引脚78LINK_O O电缆连接状态显示输出,高电平有效79WAKEUP O流出一个唤醒信号当唤醒事件发生内置60K欧姆的下拉电阻80PW_RST#I上电复位低电平激活DM9000的重新初始化,5us后初始化当该引脚测试到电平变化74,75,77NC无用电源引脚DVDD P数字电源5,20,36,55,72,90,73DGND P数字地15,23,42,5863,81,99,76内部寄存器DM9000(A)包含一系列可被访问的控制状态寄存器,这些寄存器是字节对齐的,他们在硬件或软件复位时被设置成初始值。
XDMA驱动配置及详解
第⼀步:打驱动
在设备管理器中找到PCI内存设备,更新驱动程序 XDMA_Driver(整个⽂件夹),电脑调成测试模式
打完驱动断电重启后会出现XDMA设备
第⼆步:找设备并打开和关闭
通过设备实例路径来识别每⼀个XDMA设备,因为每个XDMA设备的设备实例路径是唯⼀的。
如果想打开读写寄存器设备 1 : 设备实例路径 + “\\user” (中间有些步骤省略 详情查看 便携式记录仪V1.0//MyWinDriverLib.cpp 中的
openControlDevice()函数)
2 : 打开设备
打开DMA设备
1:设备实例路径 + “\\c2h_0” (FPGA --> PC) 设备实例路径 + “\\h2c_0” (PC-->FPGA) (中间有些
步骤省略 详情查看 便携式记录仪V1.0//MyWinDriverLib.cpp 中的openDmaDevice()函数)
2: 打开设备
第三步:读写寄存器和DMA
1: ReadFile()/WriteFile() (中间有些步骤省略 详情查看 便携式记录仪V1.0//MyWinDriverLib.cpp 中的sys_write32() sys_read32()
sys_dma_read())
第四步:关闭设备句柄
CloseHandle()
总结:
1:打驱动
2:根据设备实例路径对应上FPGA 然后在打开读写寄存器控制设备和DMA设备 (这种驱动类似⽂件操作)
电脑网卡驱动升级教程解决网络连接问题的方法在现代社会中,电脑已经成为人们日常生活中不可或缺的工具之一。
然而,有时我们可能会遇到网络连接问题,这往往会给我们带来困扰。
其中一个常见的原因是网卡驱动过旧或损坏。
为了解决这个问题,我们可以通过升级网卡驱动来改善网络连接。
本文将为您详细介绍电脑网卡驱动升级的教程及解决网络连接问题的方法。
一、了解电脑网卡驱动电脑网卡驱动是控制电脑与网络连接的重要组件。
它负责将电脑与网络设备进行数据交换和传输。
如果网卡驱动过旧或损坏,网络连接就会受到影响,导致网速慢、断网等问题。
因此,保持网卡驱动的最新状态非常重要。
二、确定电脑网卡型号及当前版本在进行网卡驱动升级之前,我们需要先确定电脑上使用的网卡型号以及当前的驱动版本。
这样可以确保我们下载到与我们的硬件兼容的正确驱动程序。
1. 打开计算机的“设备管理器”。
您可以通过按下“Win + X”键,然后选择“设备管理器”来快速打开它。
2. 展开“网络适配器”选项。
这里将显示电脑中已安装的网卡设备。
3. 右键单击所使用的网卡设备,并选择“属性”。
4. 在弹出的对话框中,切换到“驱动程序”选项卡,并查看“驱动程序版本”。
记录下当前的驱动版本号。
三、下载适用于电脑网卡的最新驱动1. 首先,我们需要访问网卡制造商的官方网站,以获取最新的驱动程序。
您可以使用搜索引擎来搜索网卡制造商的官方网站,然后在其网站上找到与您的网卡型号匹配的驱动程序。
2. 一旦找到正确的网卡驱动程序下载页面,确保选择与您的操作系统兼容的驱动程序版本。
3. 点击下载按钮,将驱动程序保存到您的电脑上。
四、卸载旧的网卡驱动在安装新的网卡驱动之前,我们需要先卸载旧的驱动程序。
这样可以避免驱动冲突和不稳定性。
1. 再次打开计算机的“设备管理器”。
2. 找到之前记录下的网卡设备,在其上右键单击,并选择“卸载设备”。
3. 在弹出的对话框中,选中“删除驱动程序软件”选项,并点击“卸载”按钮。
基于S3C2410的CS8900A驱动程序设计摘要:在介绍S3C2410嵌入式微处理器结构并分析CS8900A 以太网控制器基础上,提出了基于S3C2410 的以太网控制芯片CS8900A 驱动程序设计方法,给出了驱动程序流程,并采用C++实现了程序。
实验表明,所给出的程序能正确运行,并获得较高的下载速度。
关键词:S3C2410;CS8900A;驱动程序0 引言S3C2410是Samsung公司推出的一款基于ARM920T内核的16/32位RISC嵌入式微处理器,最高工作频率可达203MHz,主要面向手持设备以及高性价比、低功耗的应用。
芯片实现了MMU、AMBA(Advanced Microcontroller Bus Architecture)、BUS和哈佛(Harvard)高速缓存体系结构。
其中,MMU主要用于管理虚拟内存,AMBA总线是ARM公司设计的一种用于高性能嵌入式系统的总线标准,高速缓存由独立的16KB指令Cache和16KB数据Cache组成。
S3C2410还提供了大量的内部设备和丰富的外部接口。
CS8900A 是由美国CIRRUS LOGIC 公司生产的以太网控制器,由于其优良的性能、低功耗及低廉的价格,使其在市场上10Mbps 嵌入式网络应用中占有相当的比例。
本文研究基于S3C2410的以太网控制芯片的CS8900A驱动程序设计。
1 CS8900A特性分析CS8900A 芯片主要性能为:①符合Ethernet II 与IEEE802.3(10Base5、10Base2、10BaseT)标准;②全双工,收发可同时达到10Mbps 的速率;③内置SRAM,用于收发缓冲,降低对主处理器的速度要求;④支持16 位数据总线,4个中断申请线以及三个DMA 请求线;CS8900A有两种工作模式,一种是I/O访问方式,一种是内存访问方式。
网卡芯片复位后默认工作方式为I/O连接,I/O端口基址为300H。
2410平台上dm9000a网卡驱动分析 该驱动基于linux-2.6.24.4内核。
首先,需要在arch/arm/mach-s3c2410/mach-smdk2410.c文件中添加如下代码:
static struct resource s3c_dm9000_resource [] = { [0] = { .start = 0x10000000, .end = 0x10000040, .flags = IORESOURCE_MEM }, [1] = { .start = IRQ_EINT2, .end = IRQ_EINT2, .flags = IORESOURCE_IRQ, } };
注意上面的start、end等地址是指的网卡的物理地址。然后,还要在该文件中加入如下代码: struct platform_device s3c_device_dm9000 = { .name = "dm9000", .id = -1, .num_resources = ARRAY_SIZE(s3c_dm9000_resource), .resource = s3c_dm9000_resource, };
需要特别注意上面的name字段,当设备驱动程序寻找设别资源时,会根据该字段对设备进行匹配。另外,该文件中的smdk2410_devices[]数组中,还需要加入s3c_device_dm9000,不然系统启动时没有找到该资源就不会调用相应的probe函数。
下面分析驱动程序的probe函数。若驱动被编译进内核,则在系统启动的时候,该函数会被调用。该函数的源代码如下:
static int dm9k_drv_probe(struct platform_device *pdev) { struct net_device *ndev; unsigned long base; unsigned int *addr = NULL; int ret = -ENODEV; ndev = alloc_etherdev(sizeof(struct board_info)); if (!ndev) { printk("%s: could not allocate device.\n", CARDNAME); return -ENOMEM; }
ndev->dma = (unsigned char)-1; if (pdev->num_resources < 2 || pdev->num_resources > 3) { printk("DM9000: Wrong num of resources %d\n", pdev->num_resources); ret = -ENODEV; goto out; } base = pdev->resource[0].start; ndev->irq = pdev->resource[1].start; /* * Request the regions. */ if (!request_mem_region(base, 4, ndev->name)) { ret = -EBUSY; goto out; }
addr = ioremap(base, 4); if (!addr) { ret = -ENOMEM; goto release_mem; } ret = dm9k_probe(ndev, (unsigned long)addr); if (ret != 0) { iounmap(addr); release_mem: release_mem_region(base, 4); out: printk("%s: not found (%d).\n", CARDNAME, ret); kfree(ndev); } return ret; }
函数首先调用alloc_etherdev,该函数在include/linux/etherdevice.h中声明,其中有如下语句: #define alloc_etherdev(sizeof_priv) alloc_etherdev_mq(sizeof_priv, 1) 而alloc_etherdev_mq函数又定义在net/ethernet/eth.c中,如下: struct net_device *alloc_etherdev_mq(int sizeof_priv, unsigned int queue_count) { return alloc_netdev_mq(sizeof_priv, "eth%d", ether_setup, queue_count); }
可见,该函数只是用自己的参数来调用alloc_netdev_mq函数。alloc_netdev_mq函数定义在net/core/dev.c中,原型如下:
struct net_device *alloc_netdev_mq(int sizeof_priv, const char *name, void (*setup)(struct net_device *), unsigned int queue_count)
关于该函数的说明: /** * alloc_netdev_mq - allocate network device * @sizeof_priv: size of private data to allocate space for * @name: device name format string * @setup: callback to initialize device * @queue_count: the number of subqueues to allocate * * Allocates a struct net_device with private data area for driver use * and performs basic initialization. Also allocates subquue structs * for each queue on the device at the end of the netdevice. */
可见,alloc_etherdev为设备驱动分配了私有数据空间,并对设备驱动做了一些初始化工作。
接下来,设备驱动将要检查设备的resources的数量,如果数量小于2或者大于3,则初始化函数自动返回,初始化失败。我们的设备驱动中,resources的数量为2:一个表示设备的IO地址,另一个是设备的中断号。
代码
base = pdev->resource[0].start; ndev->irq = pdev->resource[1].start;
分别得到设备的端口地址和中断号。 接下来,驱动程序将向系统申请io内存,从地址base开始,大小为4个字节。如果申请成功,接下来需要做的就是将地址重新映射,从地址base开始,长度为4个字节。这样做的原因主要是驱动程序一般不直接访问物理地址,而访问虚拟地址。地址重新映射成功后,就调用dm9k_probe函数进行设备初始化。
dm9k_probe函数的全部代码如下 int __init dm9k_probe(struct net_device *dev, unsigned long addr) { struct board_info *db; /* Point a board information structure */ u32 id_val; u16 i, j; int retval; /* Search for DM9000 serial NIC */ PUTB(DM9KS_VID_L, addr); id_val = GETB(addr + 2); /* Change offset to 2 ^^^^^ */ PUTB(DM9KS_VID_H, addr); id_val |= GETB(addr + 2) << 8; PUTB(DM9KS_PID_L, addr); id_val |= GETB(addr + 2) << 16; PUTB(DM9KS_PID_H, addr); id_val |= GETB(addr + 2) << 24; if (id_val != DM9KS_ID && id_val != DM9010_ID) { /* Dm9k chip not found */ printk("dmfe_probe(): DM9000 not found. ID=%08X\n", id_val); return -ENODEV; }
printk(" I/O: %lx, VID: %x \n",addr, id_val); /* Allocated board information structure */ memset(dev->priv, 0, sizeof(struct board_info)); db = (board_info_t *)dev->priv; dmfe_dev = dev; db->io_addr = addr; db->io_data = addr + 2; /* Change offset to 2 ^^^^^ */ /* driver system function */
dev->base_addr = addr; dev->irq = IRQ_EINT2; dev->open = &dmfe_open; dev->hard_start_xmit = &dmfe_start_xmit; dev->watchdog_timeo = HZ; dev->tx_timeout = dmfe_timeout; dev->stop = &dmfe_stop; dev->get_stats = &dmfe_get_stats; dev->set_multicast_list = &dm9000_hash_table; dev->do_ioctl = &dmfe_do_ioctl; for(i=0,j=0x10; i<6; i++,j++) { db->srom[i] = ior(db, j);