机器人基本命令
- 格式:doc
- 大小:17.38 KB
- 文档页数:8
程序号的说明(程序起名)将光标移动程序最前面“0”的地方,按FN99(说明),这时会出现一个界面,选择需要的符号或数字,按键选择确定,当输入完毕后按写入就好了。
查看产品代号相对应的程序动作可能+程序,一览表程序的合并例如:1号工作台上的工件程序为1号,2号工作台上的工件程序为2号。
现需要用1个控制盒来同时控制2个工位,那么就需要将2个工位的程序1号程序和2号程序合并在一起。
首先找一个空的程序,例如3号程序。
在3号程序中按FN80(程序调用)——确定——输入1——确定,按FN41(机器人停止)——确定,按FN80——确定——输入2——确定,END这时工位启动分配只要启动3号就可以同时控制1号程序和2号程序了。
文件的保护和删除单个程序的保护:开机界面——文件操作——保护——内部储存器——部分保护——程序,在程序处输入需要保护的程序号——确定——执行。
多个程序的保护:开机界面——文件操作——保护——内部储存器——部分保护——程序——WORK——确定——PROGAM,用光标选择需要保护的程序——确定——执行。
单个程序的删除:开机界面——文件操作——程序删除——内部储存器——程序,在程序处输入需要删除的程序号——确定——执行。
动作可能+删除。
多个程序的删除:开机界面——文件操作——程序删除——内部储存器——程序——WORK——确定——PROGRAM,用光标选择需要删除和程序——确定——执行。
解除保护:开机界面——文件操作——保护——内部储存器——保护解除——程序。
气体或焊丝直径的变更不同的气体或不同的焊丝直径焊接命令中的匹配电压都不一样,所以当气体或焊丝直径变更时,请注意修改以下内容:开机界面——按复位键(R)——输入314——确定——输入12345——确定电弧常数设定——特性数据的设定——特性1——按屏幕右上角的选择进入选择项选择需要的特性——确定——写入进入编程界面,修改起弧和收弧命令中的电压。
异常情况的检查1、开机界面——键转换——监视器2——异常履历;2、开机界面——动作可能——维修——监视器2——异常履历。
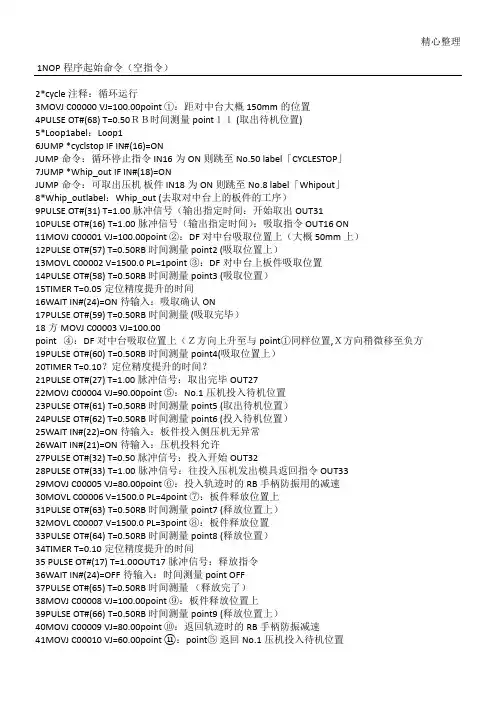
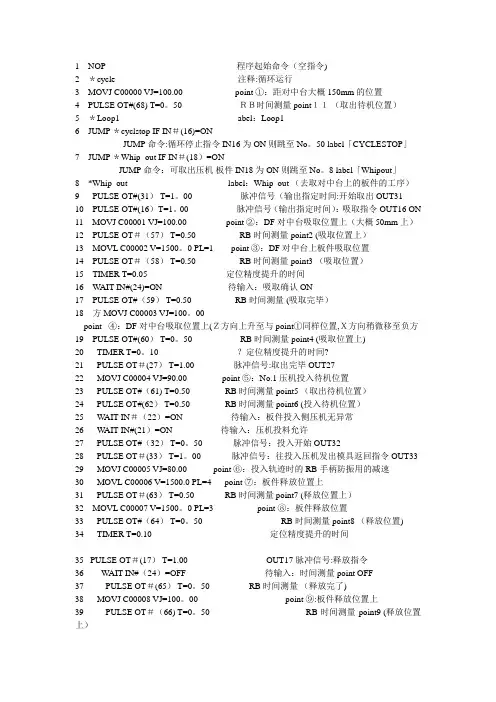
精心整理1NOP程序起始命令(空指令)2*cycle注释:循环运行3MOVJ C00000 VJ=100.00point ①:距对中台大概150mm的位置4PULSE OT#(68) T=0.50RB时间测量point11 (取出待机位置)5*Loop1abel:Loop16JUMP *cyclstop IF IN#(16)=ONJUMP命令:循环停止指令 IN16为ON则跳至No.50 label「CYCLESTOP」7JUMP *Whip_out IF IN#(18)=ONJUMP命令:可取出压机板件 IN18为ON则跳至No.8 label「Whipout」8*Whip_outlabel:Whip_out (去取对中台上的板件的工序)9PULSE OT#(31) T=1.00脉冲信号(输出指定时间:开始取出 OUT3110PULSE OT#(16) T=1.00脉冲信号(输出指定时间):吸取指令 OUT16 ON11MOVJ C00001 VJ=100.00point ②:DF对中台吸取位置上(大概50mm上)12PULSE OT#(57) T=0.50RB时间测量point2 (吸取位置上)13MOVL C00002 V=1500.0 PL=1point ③:DF对中台上板件吸取位置14PULSE OT#(58) T=0.50RB时间测量point3 (吸取位置)15TIMER T=0.05定位精度提升的时间16WAIT IN#(24)=ON待输入:吸取确认 ON17PULSE OT#(59) T=0.50RB时间测量 (吸取完毕)18方MOVJ C00003 VJ=100.00point ④:DF对中台吸取位置上(Z方向上升至与point①同样位置,X方向稍微移至负方19PULSE OT#(60) T=0.50RB时间测量point4(吸取位置上)20TIMER T=0.10?定位精度提升的时间?21PULSE OT#(27) T=1.00脉冲信号:取出完毕 OUT2722MOVJ C00004 VJ=90.00point ⑤:No.1压机投入待机位置23PULSE OT#(61) T=0.50RB时间测量point5 (取出待机位置)24PULSE OT#(62) T=0.50RB时间测量point6 (投入待机位置)25WAIT IN#(22)=ON待输入:板件投入侧压机无异常26WAIT IN#(21)=ON待输入:压机投料允许27PULSE OT#(32) T=0.50脉冲信号:投入开始 OUT3228PULSE OT#(33) T=1.00脉冲信号:往投入压机发出模具返回指令 OUT3329MOVJ C00005 VJ=80.00point ⑥:投入轨迹时的RB手柄防振用的减速30MOVL C00006 V=1500.0 PL=4point ⑦:板件释放位置上31PULSE OT#(63) T=0.50RB时间测量point7 (释放位置上)32MOVL C00007 V=1500.0 PL=3point ⑧:板件释放位置33PULSE OT#(64) T=0.50RB时间测量point8 (释放位置)34TIMER T=0.10定位精度提升的时间35 PULSE OT#(17) T=1.00OUT17脉冲信号:释放指令36WAIT IN#(24)=OFF待输入:时间测量point OFF37PULSE OT#(65) T=0.50RB时间测量(释放完了)38MOVJ C00008 VJ=100.00point ⑨:板件释放位置上39PULSE OT#(66) T=0.50RB时间测量point9 (释放位置上)40MOVJ C00009 VJ=80.00point ⑩:返回轨迹时的RB手柄防振减速41MOVJ C00010 VJ=60.00point ⑪:point⑤返回No.1压机投入待机位置精心整理42PULSE OT#(67) T=0.50RB时间测量point10 (投入完了位置)43OUT28PULSE OT#(28) T=1.00脉冲信号:投入完了44*Loop2label:Loop245JUMP *cyclstop IF IN#(16)=ONJUMP命令:循环停止指令 IN16为ON则跳至No.50 label「cyclstop」46JUMP *cycle IF IN#(39)=ONJUMP命令:自动循环中 IN39为ON则跳至No.1 label; 「cycle」47JUMP JOB:HOME_POS IF IN#(23)=ONJUMP命令:作业原点移动指令 IN23为ON则跳至JOB「HOME_POS」48JUMP *Loop2JUMP命令:返回No.44label「Loop2」49MOVJ C00011 VJ=100.00与①同样的point(?认为没必要的step・・・?)50*cyclstoplabel:cyclstop51ENDEND命令:宣告JOB完毕。
kuka圆弧指令
在KUKA机器人的编程语言KRL中,圆弧指令以一种被称为“ARC”的命令来表示。
这个命令用于控制机器人沿着弧线进行移动。
以下是一个关于这个指令的示例:
```
ARC L 100 R 50 P 1800 T*ARC_IN1:=TRUE T*ARC_IN2:=FALSE ```
这个指令中的参数具有以下含义:
- “L”:表示线性移动,这是机器人移动的默认类型。
- “100”:这是X轴的移动量,以毫米为单位。
- “R”:表示机器人半径,通常与机器人的尺寸和型号相关。
- “50”:这是圆弧的半径,以毫米为单位。
- “P”:表示机器人在圆弧上开始移动的起始角度,以度为单位。
- “T*ARC_IN1:=TRUE”和“T*ARC_IN2:=FALSE”:这些是工具偏移的输入参数,用于确保工具在移动过程中的正确定位。
在实际编程中,您需要根据KUKA机器人的具体型号、配置和任务需求来调整这些参数。
机器⼈基本操作产业机器⼈操作说明书基本操作型号No.YA-1 NA系列VRⅡ系列内容1.结构2.如何使⽤⽰教盒3.⼯作时得到的协助 (帮助)4.⽰教模式操作 (⽰教)5.AUTO 模式6.查看7.有⽤的⽂件编辑功能8.错误和警报9.图标10.次序指令⽬录GⅡ控制器使⽤本产品之前,请仔细阅读本⼿册并保存本⼿册以备以后使⽤。
OM0105045E000108Panasonic机器⼈VRⅡ系列的"操作⼿册"系统■介绍感谢你购买我们的G2系列Panasonic⼯业机器⼈。
本⼿册解释G2系列的基本操作。
■安全⾸先,请仔细阅读并了解单独提供的"安全⼿册",以对我们的机器⼈进⾏适当和安全的操作。
在操作之前,为适当的操作请阅读这本⼿册。
把这本⼿册留在⼀容易接近的地⽅以备以后查阅。
本⼿册内容如有变更,恕不另⾏通知■警告和⼩⼼这本⼿册的构成的前提是所有操作机器⼈的⼈员必须完成相关的培训,这也是相关的规则和标准的⼀个需求。
⼀些安全预防通过使⽤下列各项符号被强调,需要额外注意。
在这本⼿册中列出的警告,⼩⼼,强制性的⾏动和禁令必须执⾏。
如果机器⼈移动⽅向不⼩⼼弄错,将有可能导致操作⼈员以及其他⼈员的受伤,以及设备的损坏。
随时确认设备的正常运⾏也是很重要的。
Panasonic 机器⼈是在满⾜本⼿册被使⽤者遵照的前提上被设计和制造的。
使⽤任何其他的⼿册的⼈员⼀定要⾸先阅读且了解本⼿册的内容。
●对机器的不合适的操作可能导致各种不同⽔平的危险情况或损害。
这份⽂件把所有的这些危险的情况和损害分类为两个⽔平,警告或⼩⼼,⽽且使⽤符号指⽰。
警告符号和信号名称也被⽤在机器附带的警告标签上。
警告符号信号名称描述危险这个符号意谓着如果操作不⼩⼼,将导致包括死亡或严重的个⼈伤害的危险意外事件。
警告这个符号意谓着如果操作不⼩⼼,将导致潜在的包括死亡或严重的个⼈伤害的危险意外事件。
⼩⼼这个符号意谓着如果操作不⼩⼼,将导致潜在的包括不同程度的或轻微的的个⼈伤害的危险意外事件以及对设备的潜在的财产损坏。
博途blkmove指令举例博途是一款针对早教市场的教育机器人,提供了丰富的学习内容和互动体验。
其中,blkmove是博途的一项指令,用于控制机器人的运动。
在本文中,将以博途blkmove指令为主题,一步一步回答以下问题。
一、什么是博途blkmove指令?博途blkmove指令是博途机器人系统中的一个命令,用于控制机器人的移动。
通过这个指令,用户可以指定机器人的运动方向、速度和时间等参数,从而让机器人按照指定的路径移动。
二、如何使用blkmove指令?使用blkmove指令,需要按照一定的步骤进行操作。
具体步骤如下:1. 连接机器人:使用手机或平板电脑等设备连接到博途机器人的WIFI网络。
2. 打开控制面板:在设备中打开博途应用或控制面板,进入机器人的控制界面。
3. 选择blkmove指令模块:在控制界面中,找到blkmove指令模块,点击进入。
4. 设置移动参数:在blkmove指令模块中,可以设置机器人的移动参数。
首先,选择移动方向,可以是向前、向后、向左或向右。
其次,设置机器人的移动速度,一般以一个百分比表示,例如设置为50,表示以正常速度的一半移动。
最后,设置机器人移动的时间,可以是秒或毫秒为单位。
5. 执行移动指令:设置好移动参数后,点击“执行”按钮,机器人将按照指定的路径进行移动。
用户可以观察机器人的移动轨迹和动作。
6. 停止移动:在移动过程中,如果需要停止机器人的移动,可以点击“停止”按钮。
机器人将立即停止移动,并保持当前位置。
三、blkmove指令的应用场景有哪些?blkmove指令可以应用于多种场景,以下是一些示例:1. 导航功能:通过使用blkmove指令,用户可以指定机器人的移动方向和路径,从而实现导航功能。
例如,用户可以让机器人按照指定路径在房间中巡航,或者指定机器人前往指定位置。
2. 移动距离测量:通过设置机器人的移动速度和时间,用户可以利用blkmove指令来测量物体的距离。
1指令AccSet-降低加速度ActEventBuffer - 事件缓冲启用ActUnit - 启用机械单元Add-增加数值AliasIO - 确定I/O信号以及别名AliasIOReset-重置I/O信号以及别名":=" - 分配一个数值BitClear - 在一个字节或双数值数据中清除一个特定位BitSet - 在一个字节或者双数值数据中设置一个特定位BookErrNo - 登记RAPID系统错误编号Break - 中断程序执行CallByVar - 通过变量,调用无返回值程序CamFlush - 从摄像头删除集合数据CamGetParameter - 获取不同名称的摄像头参数CamGetResult - 从集合获取摄像头目标CamLoadJob -加载摄像头任务到摄像头CamReqImage - 命令摄像头采集图像CamSetExposure - 设置具体摄像头的数据CamSetParameter - 设置不同名称的摄像头参数CamSetProgramMode - 命令摄像头进入编程模式CamSetRunMode - 命令摄像头进入运行模式CamStartLoadJob - 开始加载摄像头任务到摄像头CamWaitLoadJob –等待摄像头任务加载完毕CancelLoad - 取消模块加载CheckProgRef - 检查程序参考CirPathMode - 圆周路径期间的工具方位调整Clear - 清除数值ClearIOBuff - 清除串行通道的输入缓存ClearPath - 清除当前路径ClearRawBytes - 清除原始数据字节数据的内容ClkReset - 重置用于定时的时钟ClkStart - 启动用于定时的时钟ClkStop - 停止用于定时的时钟Close - 关闭文件或者串行通道CloseDir - 关闭路径Comment - 备注Compact IF - 如果满足条件,那么(一个指令)ConfJ - 接头移动期间,控制配置ConfL - 线性运动期间,监测配置CONNECT - 将中断与软中断程序相连CopyFile - 复制文件CopyRawBytes - 复制原始数据字节数据的内容CorrClear - 移除所有修正发电机CorrCon - 与修正发电机相连CorrDiscon - 与修正发电机断开CorrWrite - 写入修正发电机DeactEventBuffer - 事件缓冲启用DeactUnit - 停用机械单元Decr - 减量为1DitherAct - 促使软伺服抖动DitherDeact - 促使软伺服停止抖动DropSensor - 使物体落于传感器上DropWObj - 使工件落于传送带上EGMActJoint-为一个关节目标点编写一次EGM移动EGMActMove-编写一次经过路径校正的EGM移动EGMActPose-为一个姿态目标点编写一次EGM移动EGMGetId-获取一个EGM标识EGMMoveC-经过路径校正的圆形EGM移动EGMMoveL-经过路径校正的直线EGM移动EGMReset-重置一项EGM进程EGMRunJoint-执行一次含一个关节目标点的EGM移动EGMRunPose-执行一次含一个姿态目标点的EGM移动EGMSetupAI-为EGM设置模拟输入信号EGMSetupAO-为EGM设施模拟输出信号EGMSetupGI-为EGM设置编组输入信号EGMSetupLTAPP-为EGM设置相应的LTAPP协议EGMSetupUC-为EGM设置UdpUc协议EGMStop-停止一次EGM移动EOffsOff - 停用附加轴的偏移量EOffsOn - 启用附加轴的偏移量EOffsSet - 启用附加轴(使用已知值)的偏移量EraseModule - 擦除模块ErrLog - 写入错误消息ErrRaise - 写入警告,调用错误处理器ErrWrite - 写入错误消息EXIT - 终止程序执行ExitCycle - 中断当前循环,并开始下一循环FOR - 重复给定的次数FricIdInit - 开始摩擦识别FricIdEvaluate - 评估摩擦识别FricIdSetFricLevels - 在摩擦识别后设置摩擦等级GetDataVal - 获得数据对象的值GetSysData - 获取系统数据GetTrapData - 获取当前TRAP的中断数据GOTO - 转到新的指令GripLoad - 定义机械臂的有效负载HollowWristReset - 重置IRB和IRB的中空腕IDelete - 取消中断IDisable - 禁用中断IEnable - 启用中断IError - 调整关于错误的中断IF - 如果满足条件,那么;否则Incr - 增量为1IndAMove - 独立的绝对位置运动IndCMove - 独立的连续运动IndDMove - 独立的德尔塔位置运动IndReset - 独立重置IndReset - 独立的相对位置运动InvertDO - 转化数字信号输出信号值IOBusStart - Start of I/O busIOBusState - 获取I/O总线的当前状态IODisable - 停用I/O单元IOEnable - 启用I/O单元IPers - 在永久变量数值改变时中断IRMQMessage - 下达数据类型的RMQ中断指令ISignalAI - 模拟信号输入信号的中断ISignalAO - 模拟信号输出信号的中断ISignalDI - 下达数字信号输入信号中断指令ISignalDO - 数字信号输出信号的中断ISignalGI - 下达一组数字信号输入信号中断的指令ISignalGO - 下达一组数字信号输出信号中断的指令ISleep - 停用一个中断ITimer - 下达定时中断的指令IVarValue - 下达变量值中断指令IWatch - 启用中断Label - 线程名称Load - 执行期间,加载普通程序模块LoadId - 工具或有效负载的负载识别MakeDir - 创建新路径ManLoadIdProc - IRBP机械臂的负载识别MechUnitLoad - 确定机械单元的有效负载MotionProcessModeSet - 设置运动过程模式MotionSup - 禁用/启用运动监控MoveAbsJ - 移动机械臂至绝对接头位置MoveC - 使机械臂沿圆周移动MoveCAO - 使机械臂沿圆周运动,设置拐角处的模拟信号输出MoveCDO - 使机械臂沿圆周运动,设置拐角处的数字信号输出MoveCGO - 机械臂沿圆周运动,设置拐角处的组输出信号MoveCSync - 机械臂沿圆周运动,执行RAPID无返回值程序。
1 NOP 程序起始命令(空指令)2 *cycle 注释:循环运行3 MOVJ C00000 VJ=100.00 point ①:距对中台大概150mm的位置4 PULSE OT#(68) T=0。
50 RB时间测量point11(取出待机位置)5 *Loop1 abel:Loop16 JUMP *cyclstop IF IN#(16)=ONJUMP命令:循环停止指令 IN16为ON则跳至No。
50 label「CYCLESTOP」7 JUMP *Whip_out IF IN#(18)=ONJUMP命令:可取出压机板件 IN18为ON则跳至No。
8 label「Whipout」8 *Whip_out label:Whip_out (去取对中台上的板件的工序)9 PULSE OT#(31) T=1。
00 脉冲信号(输出指定时间:开始取出 OUT3110 PULSE OT#(16) T=1。
00 脉冲信号(输出指定时间):吸取指令 OUT16 ON11 MOVJ C00001 VJ=100.00 point ②:DF对中台吸取位置上(大概50mm上)12 PULSE OT#(57) T=0.50 RB时间测量point2 (吸取位置上)13 MOVL C00002 V=1500。
0 PL=1 point ③:DF对中台上板件吸取位置14 PULSE OT#(58) T=0.50 RB时间测量point3 (吸取位置)15 TIMER T=0.05 定位精度提升的时间16 W AIT IN#(24)=ON 待输入:吸取确认 ON17 PULSE OT#(59) T=0.50 RB时间测量 (吸取完毕)18 方MOVJ C00003 VJ=100。
00point ④:DF对中台吸取位置上(Z方向上升至与point①同样位置,X方向稍微移至负方19 PULSE OT#(60) T=0。
50 RB时间测量point4 (吸取位置上)20 TIMER T=0。

小黑Robot机器人命令大全与说明您好,欢迎您使用QQ机器人帮助手册,本手册将指引您更明晰地了解指令,说明等过程。
如果想续费,请提前购买:以下内容有三种颜色区分:红色——代表指令蓝色——代表功能橙色——代表重点和注意的事项索引一、续费、激活说明与指令(第2页)二、操作过程中的注意事项(第4页)三、机器人普通聊天指令说明(第5页)四、机器人普通指令(第6页)五、机器人特殊指令之——群管指令(第8页)六、机器人特殊指令之——便民指令(第12页)七、机器人特殊指令之——娱乐指令(第14页)续费、激活说明与指令当您购买机器人后,旺旺会自动发给您卡密,下面就是卡密的用法。
首先,您需要添加机器人QQ为好友,机器人QQ会在您付款后旺旺通知您添加好机器人后请发送指令:#充值+卡号+[群号]注意,指令前有#号,整条指令不算+号,群号有中括号“[]”如图:提示充值成功后,即可拉入此机器人进你的QQ群。
方法为,进入QQ群后,点击“群设置”——“邀请好友入群”——选中机器人如图:机器人会自动识别,如果您已授权群,那么机器人会自动同意进群邀请。
然后就可以开始您的聊天之旅啦!操作过程中的注意事项机器人利用云回复功能,更先进丰富的词库和智能判断系统。
因为这样智能,所以在很多人的群中经常会遇到刷屏、聊天频繁等情况。
进而腾讯会屏蔽或冻结QQ机器人。
当您发现机器人在群中不进行回复,而私聊却有回复。
这便是被腾讯屏蔽的结果。
如果遭遇屏蔽,请不要着急,耐心等待几分钟即可。
如果您有一些特殊原因,我们可以免费提供一个备用机器人,但需要注意的是,备用机器人有利有弊。
因为容易引起群内混乱,导致两个机器人被群友大肆调戏,造成恶劣影响。
为此,我们也没有什么特别的方法,毕竟是腾讯的关系。
所以请您谅解。
机器人普通聊天指令说明机器人可以进行调侃聊天,也可以询问资料,更可以运行特殊指令,如:管理指令,便民娱乐指令等。
这里要说一下普通指令普通指令就是普通的进行聊天,也可以适当的查询资料等。
ankivectorrobot⼊门语⾳指令⼤全vector机器⼈功能不断完善。
⼀:刚开始⽀持⼀些基础指令,你跟他说话他能在本机识别,然后做出相应的响应。
在说这部分指令之前,需要加上Hey Vector.(嘿,维课的),然后他会准备听取你的指令,并给出响应。
⼆:但是由于vector算⼒有限,所以出现了第⼆种指令,云端回答。
这部分指令的前缀是:“Hey Vector, I have a question.”然后他会准备听取你的指令,并在云端做计算后给出响应。
三:亚马逊语⾳助⼿,现成的⼈⼯智能语⾳助⼿,这部分指令的前缀是:“Alexa.”,然后他会准备听取你的指令,并使⽤亚马逊云端计算后给出语⾳答复。
另外,由于我英语⼝语⾮常差,所以在APP设置⾥把语⾳设置为英式英语,这样vector容易听懂我说话。
除了以下指令,还⽀持其他⼀些类似的指令,⽐如你可以跟他说新年好、圣诞快乐等。
但全是英⽂哟。
如果你买的cozmo,cozmo是没有⽿朵的,以下指令⽆效。
⼀、Hey Vector系列:1、基础功能系列Hey vector.嗨,vector。
接下⾯句⼦:What's the weather in CityName? 问指定城市的当前天⽓Set a timer for LengthOfTime? 让它设置⼀个定时器(闹钟)Check the timer. 问它现在⼏点了What time is it? 问它现在⼏点了Take a picture of me/us. 给我拍张照⽚吧Take a picture. 拍照My name is YourName. 告诉vector你的名字,让它记住你的脸What's My name? 问它认不认识这⾯孔Come here. 过来我这⾥Look at me. 看过来......2、游戏系列:Hey vector.嗨,vector。
接下⾯句⼦:Play Blackjack. 玩21点(⼀个纸牌游戏)Give me a fist bump. 让我们击掌Find your Cube. 去找你的⽅块Do a Wheelstand. 做⼀个倒⽴动作Roll your Cube. 翻滚你的⽅块Listen to the music. 听现在正在播放的⾳乐Start Exploring.开始去探索周围Stop Exploring.停⽌探索......3、百科系列:Hey vector.嗨,vector。
机器人编程操作手册一、编程系统概述并联机器人操作系统PROGRAM (程序)LOCATION(位置)TEACH(示教)PARAMETERS(参数)机器人由程序驱动,程序的编写可以在示教器(Teaching-Programming Pendant)或PC虚拟示教器示教器:PC虚拟示教器程序编写界面主要分四个主部分:PROGRAM(程序)画面、LOCATION(位置)界面、TEACH(教导)画面和PARAMETER(参数)界面。
二、PROGRAM(程序)界面主界面主要包括三部分:指令显示区、操作区和状态栏。
1、指令显示区,显示当前文档所有的指令,并显示当前执行行。
2、操作区,有LOAD(载入文件)、SAVE(保存文件)、EDIT(编辑程序)、INSERT(插入指令)和DELETE(删除指令)四部分。
LOAD(载入文件):将程序文件载入;SAVE(保存文件):保存程序文件;EDIT(编辑程序):编辑当前的指令;INSERT(插入指令):在选中的指令行之前插入一条指令;DELETE(删除指令):删除当前选中的指令;“LOAD”和SAVE为文件操作按钮,点击弹出JOB LIST(程序列表)界面:该界面可进行OPEN(打开)、SAVE(保存)、DELETE(删除)的文件操作,CNACEL(取消并退出)。
OPEN(打开):打开选中的程序文件;SAVE(保存):保存当前程序文件;DELETE(删除):删除选中的程序文件;CNACEL(取消):取消并退出当前界面。
3、点击“EDIT”和“INSERT“按钮会弹出COMMAND EDIT(命令编辑)界面:EDIT(编辑):指编辑修改当前选中的指令;INSERT(插入):指在选中的指令行前插入一条新的指令。
DELETE(删除):删除当前选中指令行。
详细的编程指令参考《编程指令说明书v1.0》注:右上角的“UP(上)“、”DOWN(下)“为跳行或翻页按钮,”RUN(运行)“、”STOP(停止)“为运动执行和停止按钮。
1.1 INFORM的构成1 命令介绍内训资料
命令介绍
1INFORM的概要1.1 INFORM的构成NX100使用的机器人语言称为INFORM III。INFORM III由命令和附加项(标记符、数据)组成。
命令:表示执行的处理和作业。使用移动命令时,示教的位置数据会与插补方式一块自动显示。附加项:可设定速度和时间等。设定条件时,可根据需要附加数据和文字。
1.2 命令的种类命令分为以下几种。
1.3 命令集为提高操作效率,通过命令集可限制示教时可登录命令的个数。再现时可执行的命令与命令集无关,可执行所有命令。
·子集 只有使用频率比较高的命令才能登录。由于命令数目少,选择和输入操作都比较简单。
·标准集/扩展集 可登录所有命令。标准集和扩展集的区别主要是各命令能使用的附加项的个数不同。标准 集不能使用如下功能,只在登录这些命令时数据的数目会减少,操作方便些。
*使用局部变量 *附加项目使用变量(例:MOVJ VJ=I000)
1.3.1 命令集的切换在〔示教条件〕画面切换命令集。
输入输出命令执行输入输出控制的命令。DOUT、 WAIT控制命令执行处理和作业控制的命令。JUMP、TIMER运算命令使用变量等进行运算的命令。ADD、SET移动命令与移动和速度相关的命令。MOVJ、REFP平移命令平行移动当前示教位置时使用的命令。SFTON、SFTOF作业命令与作业有关的命令。ARCON、WVON选项命令与选项功能有关的命令。
MOVJVJ=50.00Ҹ䆄ヺ
䰘乍
内部资料请勿外传07.06.11 完成1.4 命令中能使用的变量
2 命令介绍 内训资料
1.4 命令中能使用的变量设定为标准集和扩展集时,变量可以作为附加项的数据使用。扩展集还可使用局部变量。但是附加项变量的单位和数值的单位是不一样的。
2 命令的登录2.1 命令的登录在程序内容画面按〔命令一览〕键进行命令的登录。
2.2 命令的学习功能命令的学习功能就是指在登录命令时,缓冲行会显示与上次登录此命令时同样的附加项,这样可使登录更简单方便。使用命令的学习功能,可以减轻登录命令的操作量。
机器人操作指南范文机器人是一种能够自动完成一系列任务的智能设备。
机器人操作指南是针对机器人的使用者编写的一份帮助文档,旨在指导用户如何正确地操作和使用机器人。
以下是一份机器人操作指南,供参考:一、机器人的基本知识1.机器人的定义:机器人是一种能够自主执行任务的智能设备。
2.机器人的分类:机器人根据功能和用途可以分为工业机器人、服务机器人、社交机器人等。
3.机器人的结构:机器人主要由机械结构、电子系统、控制系统和感知系统组成。
二、机器人的开机与关机1.开机准备:确保机器人所需电源充足,机器人周围环境干净整洁。
2.启动机器人:按下机器人的电源开关,等待机器人启动完成。
3.关机操作:按下机器人的电源关闭开关,等待机器人完全关闭。
三、机器人的操作技巧1.远程操控:通过遥控器或者手机APP远程操控机器人移动、转向、抬头等动作。
2.语音识别:使用声控功能,通过语音命令机器人执行相应任务,如“前进”、“后退”、“停止”等。
3.视觉导航:机器人可以通过拍摄周围环境图像并进行处理,实现目标识别、路径规划等功能。
4.防碰撞技巧:机器人配备了碰撞传感器,遇到障碍物时会自动停下或绕过障碍物,但在操作过程中要尽量避免撞到物体。
5.电池续航:了解机器人的电池容量和续航时间,及时为机器人充电,以免影响正常使用。
四、机器人的常见故障排除1.机器人无法启动:检查机器人电源是否连接正常,电池电量是否充足。
2.机器人移动异常:检查机器人轮胎是否卡住或受损,轮胎周围是否有堵塞物。
3.机器人无法连接网络:检查机器人的Wi-Fi设置是否正确,是否与正确的网络连接。
4.机器人异常报警:查看机器人的报警信息,按照说明书的要求进行处理。
5.机器人传感器故障:检查机器人的传感器是否受损或松动,如有需要可以更换或重新连接。
五、机器人的安全注意事项1.存放位置:机器人应放置在干燥、清洁、通风良好的位置,避免高温、高湿、尘土等对机器人的损坏。
2.使用时注意事项:在操作机器人时,不可随意拆卸机器人的外壳或关键部件,以免对机器人造成损害或引起意外。
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
1指令AccSet-降低加速度ActEventBuffer - 事件缓冲启用ActUnit - 启用机械单元Add-增加数值AliasIO - 确定I/O信号以及别名AliasIOReset-重置I/O信号以及别名":=" - 分配一个数值BitClear - 在一个字节或双数值数据中清除一个特定位BitSet - 在一个字节或者双数值数据中设置一个特定位BookErrNo - 登记RAPID系统错误编号Break - 中断程序执行CallByVar - 通过变量,调用无返回值程序CamFlush - 从摄像头删除集合数据CamGetParameter - 获取不同名称的摄像头参数CamGetResult - 从集合获取摄像头目标CamLoadJob -加载摄像头任务到摄像头CamReqImage - 命令摄像头采集图像CamSetExposure - 设置具体摄像头的数据CamSetParameter - 设置不同名称的摄像头参数CamSetProgramMode - 命令摄像头进入编程模式CamSetRunMode - 命令摄像头进入运行模式CamStartLoadJob - 开始加载摄像头任务到摄像头CamWaitLoadJob –等待摄像头任务加载完毕CancelLoad - 取消模块加载CheckProgRef - 检查程序参考CirPathMode - 圆周路径期间的工具方位调整Clear - 清除数值ClearIOBuff - 清除串行通道的输入缓存ClearPath - 清除当前路径ClearRawBytes - 清除原始数据字节数据的内容ClkReset - 重置用于定时的时钟ClkStart - 启动用于定时的时钟ClkStop - 停止用于定时的时钟Close - 关闭文件或者串行通道CloseDir - 关闭路径Comment - 备注Compact IF - 如果满足条件,那么(一个指令)ConfJ - 接头移动期间,控制配置ConfL - 线性运动期间,监测配置CONNECT - 将中断与软中断程序相连CopyFile - 复制文件CopyRawBytes - 复制原始数据字节数据的内容CorrClear - 移除所有修正发电机CorrCon - 与修正发电机相连CorrDiscon - 与修正发电机断开CorrWrite - 写入修正发电机DeactEventBuffer - 事件缓冲启用DeactUnit - 停用机械单元Decr - 减量为1DitherAct - 促使软伺服抖动DitherDeact - 促使软伺服停止抖动DropSensor - 使物体落于传感器上DropWObj - 使工件落于传送带上EGMActJoint-为一个关节目标点编写一次EGM移动EGMActMove-编写一次经过路径校正的EGM移动EGMActPose-为一个姿态目标点编写一次EGM移动EGMGetId-获取一个EGM标识EGMMoveC-经过路径校正的圆形EGM移动EGMMoveL-经过路径校正的直线EGM移动EGMReset-重置一项EGM进程EGMRunJoint-执行一次含一个关节目标点的EGM移动EGMRunPose-执行一次含一个姿态目标点的EGM移动EGMSetupAI-为EGM设置模拟输入信号EGMSetupAO-为EGM设施模拟输出信号EGMSetupGI-为EGM设置编组输入信号EGMSetupLTAPP-为EGM设置相应的LTAPP协议EGMSetupUC-为EGM设置UdpUc协议EGMStop-停止一次EGM移动EOffsOff - 停用附加轴的偏移量EOffsOn - 启用附加轴的偏移量EOffsSet - 启用附加轴(使用已知值)的偏移量EraseModule - 擦除模块ErrLog - 写入错误消息ErrRaise - 写入警告,调用错误处理器ErrWrite - 写入错误消息EXIT - 终止程序执行ExitCycle - 中断当前循环,并开始下一循环FOR - 重复给定的次数FricIdInit - 开始摩擦识别FricIdEvaluate - 评估摩擦识别FricIdSetFricLevels - 在摩擦识别后设置摩擦等级GetDataVal - 获得数据对象的值GetSysData - 获取系统数据GetTrapData - 获取当前TRAP的中断数据GOTO - 转到新的指令GripLoad - 定义机械臂的有效负载HollowWristReset - 重置IRB和IRB的中空腕IDelete - 取消中断IDisable - 禁用中断IEnable - 启用中断IError - 调整关于错误的中断IF - 如果满足条件,那么;否则Incr - 增量为1IndAMove - 独立的绝对位置运动IndCMove - 独立的连续运动IndDMove - 独立的德尔塔位置运动IndReset - 独立重置IndReset - 独立的相对位置运动InvertDO - 转化数字信号输出信号值IOBusStart - Start of I/O busIOBusState - 获取I/O总线的当前状态IODisable - 停用I/O单元IOEnable - 启用I/O单元IPers - 在永久变量数值改变时中断IRMQMessage - 下达数据类型的RMQ中断指令ISignalAI - 模拟信号输入信号的中断ISignalAO - 模拟信号输出信号的中断ISignalDI - 下达数字信号输入信号中断指令ISignalDO - 数字信号输出信号的中断ISignalGI - 下达一组数字信号输入信号中断的指令ISignalGO - 下达一组数字信号输出信号中断的指令ISleep - 停用一个中断ITimer - 下达定时中断的指令IVarValue - 下达变量值中断指令IWatch - 启用中断Label - 线程名称Load - 执行期间,加载普通程序模块LoadId - 工具或有效负载的负载识别MakeDir - 创建新路径ManLoadIdProc - IRBP机械臂的负载识别MechUnitLoad - 确定机械单元的有效负载MotionProcessModeSet - 设置运动过程模式MotionSup - 禁用/启用运动监控MoveAbsJ - 移动机械臂至绝对接头位置MoveC - 使机械臂沿圆周移动MoveCAO - 使机械臂沿圆周运动,设置拐角处的模拟信号输出MoveCDO - 使机械臂沿圆周运动,设置拐角处的数字信号输出MoveCGO - 机械臂沿圆周运动,设置拐角处的组输出信号MoveCSync - 机械臂沿圆周运动,执行RAPID无返回值程序。
机器人编程为使机器人完成某种任务而设置的动作顺序描述。
机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。
其中示教编程方法包括示教、编辑和轨迹再现,可以通过示教盒示教和导引式示教两种途径实现。
由于示教方式实用性强,操作简便,因此大部分机器人都采用这种方式。
离线编程方法是利用计算机图形学成果,借助图形处理工具建立几何模型,通过一些规划算法来获取作业规划轨迹。
与示教编程不同,离线编程不与机器人发生关系,在编程过程中机器人可以照常工作。
工业上离线工具只作为一种辅助手段,未得到广泛的应用。
1.基本命令用EDIT指令进入编辑状态后,可以用C、D、E、I、L、P、R、S、T等命令来进一步编辑。
如:C命令:改变编辑的程序,用一个新的程序代替。
D命令:删除从当前行算起的n行程序,n缺省时为删除当前行。
E命令:退出编辑返回监控模式。
I命令:将当前指令下移一行,以便插入一条指令。
P命令:显示从当前行往下n行的程序文本内容。
T命令:初始化关节插值程序示教模式,在该模式下,按一次示教盒上的“RECODE”按钮就将MOVE指令插到程序中。
列表指令DIRECTORY指令:此指令的功能是显示存储器中的全部用户程序名。
LISTL指令:功能是显示任意个位置变量值。
LISTP指令:功能是显示任意个用户的全部程序。
存储指令FORMAT指令:执行磁盘格式化。
STOREP指令:功能是在指定的磁盘文件内存储指定的程序。
STOREL指令:此指令存储用户程序中注明的全部位置变量名和变量值。
LISTF指令:指令的功能是显示软盘中当前输入的文件目录。
LOADP指令:功能是将文件中的程序送入内存。
LOADL指令:功能是将文件中指定的位置变量送入系统内存。
DELETE指令:此指令撤销磁盘中指定的文件。
COMPRESS指令:只用来压缩磁盘空间。
ERASE指令:擦除磁内容并初始化。
控制程序执行指令ABORT指令:执行此指令后紧急停止(紧停)。
DO指令:执行单步指令。
EXECUTE指令:此指令执行用户指定的程序n次,n可以从–32 768到32 767,当n被省略时,程序执行一次。
NEXT指令:此命令控制程序在单步方式下执行。
PROCEED指令:此指令实现在某一步暂停、急停或运行错误后,自下一步起继续执行程序。
RETRY指令:指令的功能是在某一步出现运行错误后,仍自那一步重新运行程序。
SPEED指令:指令的功能是指定程序控制下机器人的运动速度,其值从0.01到327.67,一般正常速度为100。
系统状态控制指令CALIB指令:此指令校准关节位置传感器。
STATUS指令:用来显示用户程序的状态。
FREE指令:用来显示当前未使用的存储容量。
ENABL指令:用于开、关系统硬件。
ZERO指令:此指令的功能是清除全部用户程序和定义的位置,重新初始化。
DONE:此指令停止监控程序,进入硬件调试状态。
2.程序指令1) 运动指令指令包括GO、MOVE、MOVEI、MOVES、DRAW、APPRO、APPROS、DEPART、DRIVE、READY、OPEN、OPENI、CLOSE、CLOSEI、RELAX、GRASP及DELAY等。
这些指令大部分具有使机器人按照特定的方式从一个位姿运动到另一个位姿的功能,部分指令表示机器人手爪的开合。
例如:MOVE #PICK!表示机器人由关节插值运动到精确PICK所定义的位置。
“!”表示位置变量已有自己的值。
MOVET <位置>,<手开度>功能是生成关节插值运动使机器人到达位置变量所给定的位姿,运动中若手为伺服控制,则手由闭合改变到手开度变量给定的值。
又例如:OPEN [<手开度>]表示使机器人手爪打开到指定的开度。
2) 机器人位姿控制指令这些指令包括RIGHTY、LEFTY、ABOVE、BELOW、FLIP及NOFLIP等。
3) 赋值指令赋值指令有SETI、TYPEI、HERE、SET、SHIFT、TOOL、INVERSE及FRAME。
4) 控制指令控制指令有GOTO、GOSUB、RETURN、IF、IFSIG、REACT、REACTI、IGNORE、SIGNAL、WAIT、PAUSE及STOP。
其中GOTO、GOSUB实现程序的无条件转移,而IF指令执行有条件转移。
IF指令的格式为IF <整型变量1> <关系式> <整型变量2><关系式> THEN <标识符>该指令比较两个整型变量的值,如果关系状态为真,程序转到标识符指定的行去执行,否则接着下一行执行。
关系表达式有EQ(等于)、NE(不等于)、LT(小于)、GT(大于)、LE(小于或等于)及GE(大于或等于)。
5) 开关量赋值指令指令包括SPEED、COARSE、FINE、NONULL、NULL、INTOFF及INTON。
6) 其他指令其他指令包括REMARK及TYPE。
机器人语言SIGLA语言SIGLA是一种仅用于直角坐标式SIGMA装配型机器人运动控制时的一种编程语言,是20世纪70年代后期由意大利Olivetti公司研制的一种简单的非文本语言。
这种语言主要用于装配任务的控制,它可以把装配任务划分为一些装配子任务,如取旋具,在螺钉上料器上取螺钉A,搬运螺钉A,定位螺钉A,装入螺钉A,紧固螺钉等。
编程时预先编制子程序,然后用子程序调用的方式来完成。
IML语言IML也是一种着眼于末端执行器的动作级语言,由日本九州大学开发而成。
IML语言的特点是编程简单,能人机对话,适合于现场操作,许多复杂动作可由简单的指令来实现,易被操作者掌握。
IML用直角坐标系描述机器人和目标物的位置和姿态。
坐标系分两种,一种是机座坐标系,一种是固连在机器人作业空间上的工作坐标系。
语言以指令形式编程,可以表示机器人的工作点、运动轨迹、目标物的位置及姿态等信息,从而可以直接编程。
往返作业可不用循环语句描述,示教的轨迹能定义成指令插到语句中,还能完成某些力的施加。
IML语言的主要指令有:运动指令MOVE、速度指令SPEED、停止指令STOP、手指开合指令OPEN及CLOSE、坐标系定义指令COORD、轨迹定义命令TRAJ、位置定义命令HERE、程序控制指令IF…THEN、FOR EACH语句、CASE语句及DEFINE等。
任务程序员能够指挥机器人系统去完成的分立单一动作就是基本程序功能。
例如,把工具移动至某一指定位置,操作末端执行装置,或者从传感器或手调输入装置读个数等。
机器人工作站的系统程序员,他的责任是选用一套对作业程序员工作最有用的基本功能。
这些基本功能包括运算、决策、通讯、机械手运动、工具指令以及传感器数据处理等。
许多正在运行的机器人系统,只提供机械手运动和工具指令以及某些简单的传感数据处理功能。
1. 运算在作业过程中执行的规定运算能力是机器人控制系统最重要的能力之一。
如果机器人未装有任何传感器,那么就可能不需要对机器人程序规定什么运算。
没有传感器的机器人只不过是一台适于编程的数控机器。
装有传感器的机器人所进行的一些最有用的运算是解析几何计算。
这些运算结果能使机器人自行做出决定,在下一步把工具或夹手置于何处。
2. 决策机器人系统能够根据传感器输入信息做出决策,而不必执行任何运算。
按照未处理的传感器数据计算得到的结果,是做出下一步该干什么这类决策的基础。
这种决策能力使机器人控制系统的功能更强有力。
3. 通讯机器人系统与操作人员之间的通讯能力,允许机器人要求操作人员提供信息、告诉操作者下一步该干什么,以及让操作者知道机器人打算干什么。
人和机器能够通过许多不同方式进行通讯。
4. 机械手运动可用许多不同方法来规定机械手的运动。
最简单的方法是向各关节伺服装置提供一组关节位置,然后等待伺服装置到达这些规定位置。
比较复杂的方法是在机械手工作空间内插入一些中间位置。
这种程序使所有关节同时开始运动和同时停止运动。
用与机械手的形状无关的坐标来表示工具位置是更先进的方法,而且(除X-Y-Z机械手外)需要用一台计算机对解答进行计算。
在笛卡儿空间内插入工具位置能使工具端点沿着路径跟随轨迹平滑运动。
引入一个参考坐标系,用以描述工具位置,然后让该坐标系运动。
这对许多情况是很方便的。
5.工具指令一个工具控制指令通常是由闭合某个开关或继电器而开始触发的,而继电器又可能把电源接通或断开,以直接控制工具运动,或者送出一个小功率信号给电子控制器,让后者去控制工具。
直接控制是最简单的方法,而且对控制系统的要求也较少。
可以用传感器来感受工具运动及其功能的执行情况。
6. 传感数据处理用于机械手控制的通用计算机只有与传感器连接起来,才能发挥其全部效用。
我们已经知道,传感器具有多种形式。
此外,我们按照功能,把传感器概括如下:(1)内体感受器用于感受机械手或其它由计算机控制的关节式机构的位置。
(2)触觉传感器用于感受工具与物体(工件)间的实际接触。
(3)接近度或距离传感器用于感受工具至工件或障碍物的距离。
(4)力和力矩传感器用于感受装配(如把销钉插入孔内)时所产生的力和力矩。
(5)视觉传感器用于“看见”工作空间内的物体,确定物体的位置或(和)识别它们的形状等。
传感数据处理是许多机器人程序编制的十分重要而又复杂的组成部分。