㈠导杆机构设计要求概述:
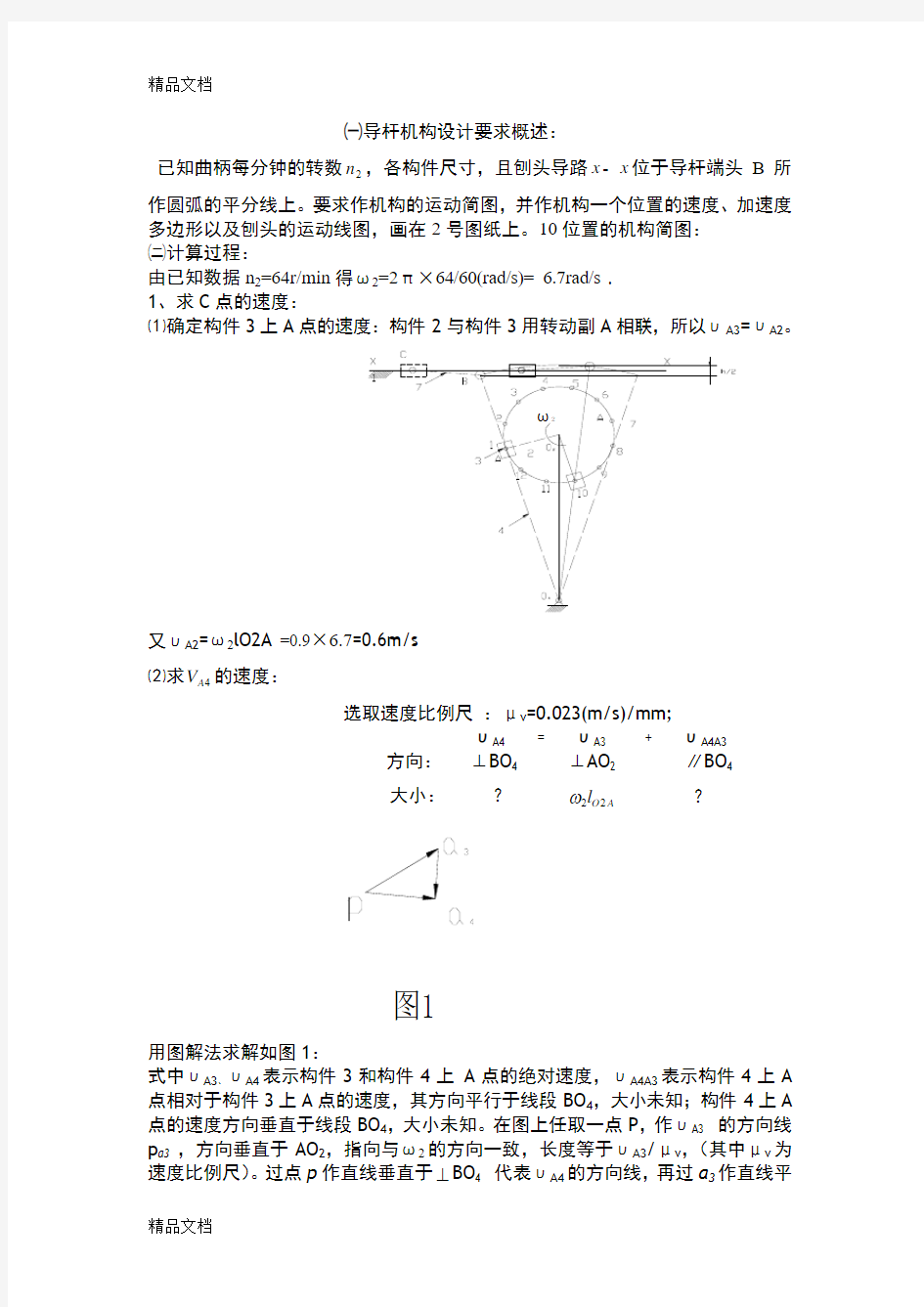
已知曲柄每分钟的转数2n ,各构件尺寸,且刨头导路x x -位于导杆端头B 所作圆弧的平分线上。要求作机构的运动简图,并作机构一个位置的速度、加速度多边形以及刨头的运动线图,画在2号图纸上。10位置的机构简图: ㈡计算过程:
由已知数据n 2=64r/min 得ω2=2π×64/60(rad/s)= 6.7rad/s . 1、求C 点的速度:
⑴确定构件3上A 点的速度:构件2与构件3用转动副A 相联,所以υA3=υA2。
又υA2=ω2lO2A =0.9×6.7=0.6m/s ⑵求4A V 的速度:
选取速度比例尺 :μv =0.023(m/s)/mm;
υA4 = υA3 + υA4A3
方向: ⊥BO 4 ⊥AO 2 ∥BO 4 大小: ? 22O A l ω ?
图1
用图解法求解如图1:
式中υA3、υA4表示构件3和构件4上 A 点的绝对速度,υA4A3表示构件4上A 点相对于构件3上A 点的速度,其方向平行于线段BO 4,大小未知;构件4上A 点的速度方向垂直于线段BO 4,大小未知。在图上任取一点P ,作υA3 的方向线p a3 ,方向垂直于AO 2,指向与ω2的方向一致,长度等于υA3/μv ,(其中μv 为速度比例尺)。过点p 作直线垂直于⊥BO 4 代表υA4的方向线,再过a 3作直线平
行于线段BO 4 代表υA4A3的方向线这两条直线的交点为a 4,则矢量p a 4和a 3a 4分别代υA4和υA4A3 。
由速度多边形43a pa 得:
443220;
l ννωA A A O A
==-
求BO 4的角速度4ω:
曲柄位于起点1时位置图如设计指导书图(1):此时
42O AO ∠为:
20490
arcsin
75.12350
π
∠AO O =
-=
将曲柄圆周作12等分则当曲柄转到1位置时,如图(1):
20490
arcsin 75.12350
π∠AO O =-=
A
O O O A
O A O O O l l l l l O O A 2424422cos 222242?-+=
∠
\4338.23AO l mm
=
杆BO 4的角速度4ω:
4ω=V A4/4
AO
l = 0.483
0.277
rad/s =1.75 rad/s 杆BO 4的速度V4:
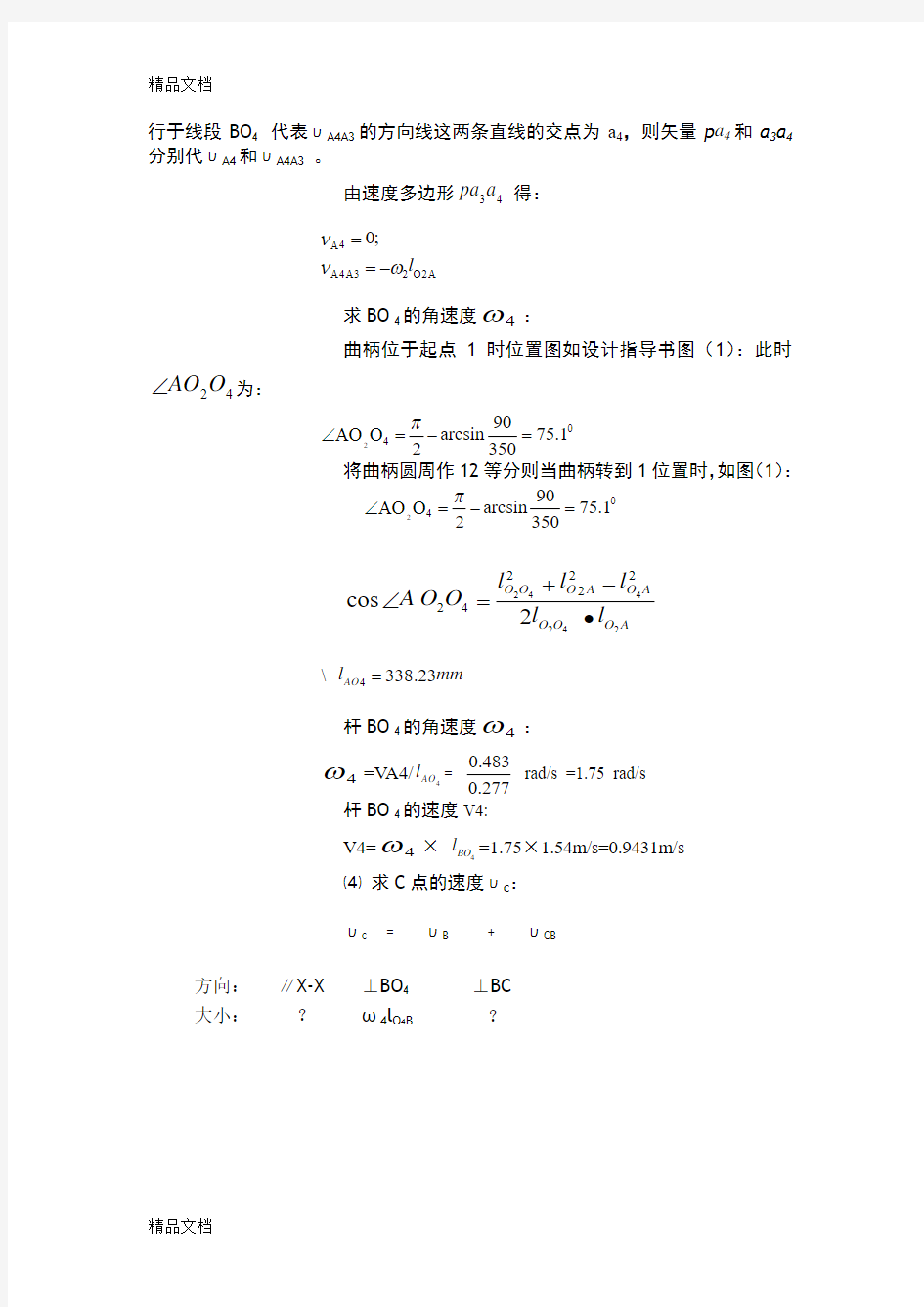
V4=4ω× 4BO l =1.75×1.54m/s=0.9431m/s ⑷ 求C 点的速度υc :
υc = υB + υCB
方向: ∥X-X ⊥BO 4 ⊥BC 大小: ? ω4l O 4B ?
图2
速度图见图2:式中υc 、υB
表示点的绝对速度。υCB 表示点C 相对点B 的相对速度其方向垂直于构件CB ,大小未知,点C 的速度方向平行于X-X ,大小未知,图上任取一点p 作代表υB 的矢量pb 其方向垂直于BO 4指向于2ω转向相反,
长度等于v B V μ/(
v μ为速度比例尺)
。过点p 作直线平行于X-X ,代表υc 的方
向线,再点b 作直线垂直于BC 代表υCB 的方向线,这两方向线的交点为C 则矢量pc 和bc 便代表 υc 、υCB 。
则C 点的速度为:υc =μv ×pc =μv × 40 = 0.92 m/s υCB =μv ×cb=μv × 5 = 0.115 m/s 2、求C 点的加速度: ⑴ 求a A2:
因曲柄匀速转动:故
2
2222
222/343.4/)2(110.0s m s m l a a AO n A A =?=?==πω
2
23/343.4s m a a A A ==
选取加速度比例尺:μa =0.15(m/s 2)/mm ⑵ 求a A4:
434343
K t
A A A A A A a a a a =++
4434343
t n K t A A A A A A A a a a a a +=++
方向: ⊥BO 4 B →O 4 A →O 2 ⊥BO 4
∥BO 4
大小: ?
4
24AO l ?ω √
3
442A A V ?ω ?
加速度见下图:
∏
式中
4
4A n A a a 和τ是4A a 的切向和切法向加速度,34A A a γ是点A4相对于A3的相对加速度,但
由于构件3与构件4构成移动副,所以034=A A n a 故3434A A t
A A r a a
=其方向平行于二构件相对移动方向,即平行于BO 4,大小未知,
3
4A A K
a 为哥氏加速度,
它的大小为
θωsin 23
44
3
4A A A A K V
a =,其中θ为相对速度34A A V 和牵连角速度4ω矢
量之间的夹角,但是对于平面运动,
4ω的矢量垂直于运动平面而34A A V 位于运
动平面内,故 90=θ,从而
3
443
42A A A A K
V a ω=哥氏加速度34A A K
a 的方向是
将
3
4A A v 沿4ω的转动方向转 90(即图中'3k a 的方向)。在上面的矢量方
程中只有344A A r
A a a 和τ的大小未知,故可用图解法求解。如右图,从任意极点π
连续作矢量
'‘4
'3
a a ππ和代表
4
3A n A a a 和;再过
'
3
a 作
'
'3k a 垂直于线段BO 4 ,大
小
mm
u V w k a a A A 2.10/2'344'
3==;然后再过'k 作BO 4的平行线,代表
34A A a γ的方向,过'
‘4a 作垂直于BO 4,的直线,代表4A n a 的方向线,它们相
交点'4a 则矢量'
4a π代表4
A a 。 '
4418.6 2.79/A a A a a a m s
μπμ===
求B 点加速度
B a :
构件4的角加速度βBO4为:
'
244BO4
404
3.29/a A AO A a a rad s l l μπβ===
22
44 1.654/n B BO a l m s ω== 2
44 5.379/t B BO BO a l m s β==
求C 点的加速度:
CB
B c a a a +=
c n t n t t n c B B CB CB a a a a a a +=+++
方向: \ ∥x-x B →O 4 ⊥BO 4 ⊥CB C →B
大小: \ ?
2
44BO l ω lBO4β
BO4
? 0.090m/s 2
加速度图见下图:
式中,
n CB
a 表示点C 相对点B 的法向加速度其方向为
从C 指B ;
τ
CB
a 表示点C 相对点B 的切向加速度,其方向垂直于CB 。又因
速度多边形已作出,所以上式法向加速度可求出(C 点作水平运动,故C 点的法向加速度为0)。仅有
τ
τCB a a c
和的大小未知,同样可以用图解法求解。如
右图,在图上任取一点π作''b π代表
n
B
a ,方向为平行于BO 4并从B 指向O 4,
长度为
a
BO l μω/424,(其中a μ为加速度比例尺)。过''b 作'''b b 代表τB a ,
方向垂直于BO 4,长度为
a BO BO l μβ/44,连接'
b π,它表示B a ,再过过'b 作
'''c b 代表
n
CB
a ,方向平行CB 并从C 指向B ,长度为
a
cB Bc l V μ/)/(2
过''c 作
垂直于CB 代表
τc B
a 的方向线又从π作平行于X-X 的方向线,两线交点为'c ,
则矢量'c π便代表
c
a 。
2222
0.110/0.090/0.135
n n
CB CB
CB v a m s m s l ===
''7.2/t c c a a a pc m s μ===
3、此时C 点位置如下图:
选取长度比例尺为:2/l mm mm μ=则:
此时C 点的位移
c
x 为:
'''2105210c l x u c c mm mm =?=?=
第二节 凸轮机构的设计 ㈠ 凸轮机构的设计要求概述:
⒈已知摆杆9作等加速等减速运动,要求确定凸轮机构的基本尺寸,
选取滚子半径,将凸轮实际轮廓㈠ 凸轮机构的设计要求概述
画在2号图纸上。
该凸轮机构的从动件运动规律为等加速等减速运动。
2.由以上
s+
2/
o+
3.依据上述运动方程绘制角位移ψ、角速度ω、及角加速度β的曲线:
(1)、角位移曲线:
图(1)
①、取凸轮转角比例尺μ
φ=1.25°/mm和螺杆摆角的比例尺μ
ψ
=0.5°/mm在轴上截取
线段代表,过3点做横轴的垂线,并在该垂线上截取33'代表(先做前半部分抛物线).做03的等分点1、2两点,分别过这两点做ψ轴的平行线。
②、将左方矩形边等分成相同的分数,得到点1'和2 '。
③、将坐标原点分别与点1',2',3'相连,得线段O1',O2'和03',分别超过1,2,3点且平行与Ψ轴的直线交与1",2"和3".
④、将点0,1",2",3"连成光滑的曲线,即为等加速运动的位移曲线的部分,后
半段等减速运动的位移曲线的画法与之相似.
(2)角速度ω曲线:
①、选凸轮转角比例尺μ
φ=1.25°/mm和角速度比例尺μ
ω
=0.0837(rad/s)/mm,
在轴上截取线段代表。
ω
②由角速度方程可得φ=φ
o
/2,ω= ωmax ,求得v换算到图示长度,3点处φ=
Φ
/2,故ωmax位于过3点且平行与ω轴的直线.由于运动为等加速、等减速,故连接03'即为此段的角速度图,下一端为等减速连接3'6即为这段角速度曲线。
③其他段与上述画法相同,只是与原运动相反。
(3)角加速度曲线:
①选取与上述相同的凸轮转角比例尺μ
φ
=1.25°/mm和角加速度比例尺
μ
β
=0.8038(rad/s)/mm在轴上截取线段代表。
②由角加速度方程求的角加速度β.因运动为等加速,等减速,故各段加速度值也相同,只是方向相反
.
4作摆动从动件盘形凸轮轮廓设计:
⑴设计原理
设计凸轮轮廓依据反转法原理。即在整个机构加上公共角速度(-ω)(ω为原凸轮旋转角速度)后,将凸轮固定不动,而从动件连同机架将以(-ω)绕凸轮轴心逆时针方向反转,与此同时,从动件将按给定的运动规律绕其轴心相对机架摆动,则从动件的尖顶在复合运动中的轨迹就是要设计的凸轮轮廓。
⑵设计凸轮轮廓:
A、绘制凸轮的理论轮廓线[既滚子轴心实际轮廓]
将ψ-φ曲线图(如图(1))的推程运动角和回程运动
角个分成4等份,按式求个等分点对应的角位移值:ψ1=μ
ψ1*11'',ψ1=μ
ψ
2*22'',……,的数值见表(1)。
选取适当的长度比例尺μl定出O2和O9的位置(选取
μl=0.002m/mm)。以O2为圆心,以r0/μl为半径,作圆,再以以O2为圆心,以r b/μl为半径作基圆。以O9为圆心,以l O o9D/μl为半径,作圆弧交基圆与D O (D’O)。则O9D O便是从动件的起始位置,注意,要求从动件顺时针摆动,故图示位置D O位于中心线O2O9的左侧。
③以O2为圆心,以l O o9 O2/μl为半径作圆,沿(-ω)[即为逆时针方向]自O2O9开始依次取推程运动角Φ0=75°,远休止角Φs=10°,回程运动角Φo’=75和远休止角Φs’=200°,并将推程和回程运动角各分成4等份,得O91 ,O92, O93……O99各点。它们便是逆时针方向反转时,从动体轴心的各个位置。
④分别以O91 ,O92, O93……O99为圆心,以l O9D/μe为半径画圆弧,它们与基圆相交于D’1,D’2,D’3……D’9,并作∠D’1O91D1,∠D’2O9rD2……分别等于摆杆角位移ψ1,ψ2,ψ3……。并使O91D1= O91 D’1,O92D2= O92D’2,……则得D1,D2,……D9(与D’9重合)各点,这些点就是逆时针方向反转时从动件摆杆端滚子轴心的轨迹点。
⑤将点D1,D2,……D9连成光滑曲线。连成的光滑曲线便是凸轮的理论轮廓,亦即为滚子轴心的轮廓轨迹。
B、绘制凸轮的实际轮廓:
在上述求得的理论轮廓线上,分别以该轮廓线上的点为圆心,以滚子半径为半径,作一系列滚子圆。
作该系列圆的内包络线,即为凸轮的实际轮廓,如图。
C、校核轮廓的最小曲率半径ρmin:
在设计滚子从动件凸轮的工作轮廓时,若滚子半径r t过大,则会导致工作轮廓变尖或交叉。
在理论轮廓线上选择曲率最大的一点E,以E为圆心作任意半径的小圆,再以该圆与轮廓的两个交点F和G为圆心,以同样半径作两个小圆,三个小圆相交于H、I、J、K四点;连HI、JK得交点C,则C点和长度CE可近似地分别作为理论轮廓上的曲率中心和曲率半径ρmin。
由图可知,CE>r t,故该凸轮轮廓的最小曲率半径ρmin符合要求。
齿轮机构的设计:
一、设计要求:
计算该对齿轮传动的各部分尺寸,以2号图纸绘制齿轮传动的啮合图,整理说明书。
1、齿轮机构的运动示意图
2、已知各数据如表:
二、计算过程:
因为n o ′/n o ″=d o ″/d o ′ 得n o ″=480r/min
"
'"
2211o //n n o z z z z = 得"
"'2112/o z z z n z n = ∴2
40z =
长江学院 机械原理课程设计说明书设计题目:插床机构设计 学院:机械与电子工程学院 专业: 班级: 设计者: 学号: 指导老师: 2016年7月1日
目录 题目及设计要求 (3) 1机构简介 (3) 2设计数据 (4) 二、插床机构的设计内容与步骤 (6) 1、导杆机构的设计与运动分析 (6) ⑴、设计导杆机构。 (6) ⑵、作机构运动简图。 (6) ⑶、作滑块的运动线图。 (6) ⑷、用相对运动图解法作速度、加速度多边形。 (7) 2、导杆机构的动态静力分析 (8) ⑴、绘制机构的力分析图(图1-4)。 (8) ⑵、选取力矩比例尺μM(N.mm/mm),绘制等效阻力矩Mr的曲线图 (9) ⑶、作动能增量△E―φ线。 (10) 3、用解析法较好机构运动分析的动态静力分析结果 (11) ⑴、图解微分法 (11) ⑵、图解积分法 (14) 4、飞轮设计 (14) 5、凸轮机构设计 (16) 6、齿轮机构设计 (19) 三、感想与体会 (21) 四、参考文献 (22)
题目及设计要求 1机构简介 插床是一种用于工件内表面切削加工的机床,也是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图1为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y-y作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O2上的凸轮驱动摆动从动件O4D和其他有关机构(图中未画出)来实现的。为了减小机器的速度波动,在曲柄轴O2上安装一调速飞轮。为了缩短空回行程时间,提高生产效率,要求刀具具有急回运动,图2为阻力线图。
大学普通高等教育 机械原理课程设计 题目题号:插床导杆机构位置3的设计 学院:机电工程学院 专业班级: 学生: 指导教师 成绩: 2013 年7月 2 日
目录 一、工作原理 二、设计要求 三、设计数据 四、设计容及工作量五. 设计计算过程 (一). 方案比较与选择 (二). 导杆机构分析与设计 1.机构的尺寸综合 2. 导杆机构的运动分析
一、工作原理: 插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄2转动,再通过导杆机构使装有刀具的滑块6沿导路y —y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H 中,前后各有一段0.05H 的空刀距离,工作阻力F 为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O 2上的凸轮驱动摆动从动件D O l 8和其它有关机构(图中未画出)来完成的。 二、设计要求: 电动机轴与曲柄轴2平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄2转速偏差为±5%。要求导杆机构的最小传动角不得小于60o ;凸轮机构的最大压力角应在许用值[α]之,摆动从动件8的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。
三、插床导杆机构设计数据 四、设计容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸, ()46.0~5.0BO BC l l =。要求用图解法设计,并将 设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架O 2O 4位于同一直线位置时,滑块6的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r o 、机架82O O l 和滚子半径r b ),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 6、按1:2绘制所设计的机构运动简图。
机械原理 课程设计说明书设计题目:插床导杆机构
已知O2O3=160mm,BC/BO3=1,行程H=120mm,行程比系数K=2,根据以上信息确定曲柄O2A ,BC,BO3长度,以及O3到YY轴的距离。 导杆机构的设计 计算过程计算结果O2A长度的确定 由) 180 /( ) 180 (0 0θ θ- + = K,得极为夹角: 60 = θ, 首先做出曲柄的运动轨迹,以O2为圆心,O2A为半径做 圆,随着曲柄的转动,有图知道,当O2A转到9,于圆相切 于上面时,刀具处于下极限位置;当O2A转到1,与圆相切 于下面时,刀具处于上极限位置。于是可得到1与9的夹角 即为极为夹角0 60 = θ。由几何关系知,9 1 2 3 2 3 O O O O∠ = ∠, 于是可得, 9 1 2 3 2 3 O O O O∠ = ∠? =60。由几何关系可得: ? =COS60 2 3 2 O O A O 代入数据,O2O3=160mm,得 柄长为80mm。 60 = θ O2A=80mm
2.杆 2 BO BC、的长度的确定 当刀具处于上极限位置C2和下极限位置C1时,C1C2长 度即为最大行程H =120mm,即有C1C2=120mm。在确定曲 柄长度过程中,我们得到9 1 2 3 2 3 O O O O∠ = ∠? =60,那么可得 到? = ∠60 2 3 1 B O B,那么可知道三角形△B 1 O3B2是等边三角 形。 由几何关系知道B1B2C2C1四边形是平行四边形,那么 B2B1=C2C1,又上面讨论知△B1O3B2为等边三角形,于是有 B1O3=B1B2,那么可得到BO3=100mm 又知BC/BO3=1,所以有 BC=100mm BO2=120mm BC=120mm 3.O3到YY轴的距离的确定 YY轴由 3 3 1 1 y y y y移动到过程中,同一点的压力角先减小, 后又增大,那么在中间某处必有一个最佳位置,使得每个位 置的压力角最佳。 考虑两个位置: 1当YY轴与圆弧 1 2 B B刚相接触时,即图3中左边的那 条点化线,与圆弧 1 2 B B相切与B1点时,当B点转到 1 2 ,B B, 将会出现最大压力角。
插床机构综合与传动系统设计目录
题目及设计要求 一、设计题目 插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图6-15为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y-y作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴 Q 图3-30 插床机构运动方案示意图
上的凸轮驱动摆动从动件 和其他有关机构(图中未画出)来实现的。画出)来实现的。 针对图3-30所示的插床机构运动方案,进行执行机构的综合与分析,并进行传动系统结构设计。 二、设计数据与要求 依据插床工况条件的限制,预先确定了有关几何尺寸和力学参数,如表6-4所示。要求所设计的插床结构紧凑,机械效率高。 表6-4 插床机构设计数据
三、设计任务 1. 针对图1所示的插床的执行机构(插削机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图; 2. 假设曲柄1等速转动,画出滑块C 的位移和速度的变化规律曲线; 3. 在插床工作过程中,插刀所受的阻力变化曲线如图6-16所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩; 4. 确定电动机的功率与转速; 5. 取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量; 6. 编写课程设计说明书; 7. 感想与建议。 图3-31 插刀所受阻力曲 线
目录 第一章绪论 第二章插床主体机构尺寸综合设计 第三章插床切削主体结构运动分析 第四章重要数据及函数曲线分析 第五章工作台设计方案 第六章总结 ; — @
第一章绪论 一,设计的题目:插床运动系统方案设计及其运动分析。 二,此设计是工科专业在学习《机械原理》后进行的一次较全面的综合设计训练,其目的: 1.巩固理论知识,并应用于解决实际工程问题; 2.建立机械传动系统方案设计、机构设计与分析概念; 3.进行计算、绘图、正确应用设计资料、手册、标准和规范以及使用经验数据的能力训练。 三,主要内容: 1.确定插床主要尺寸,然后按1:1的比例画出图形。对插刀进行运动分析,选取适当比例尺画出不同点速度,加速度矢量图得到不同点的速度,加速度,并对两处位移,作出位移,速度,加速度同转角的图像 : 2.在内容1运动分析的基础上作出运动循环图,在运动循环图的指导下,根据设计要求确定工作台进给运动机构传动方案设计(包括上下滑板1和2进给运动的机构传动方案设计;回转台3分度运动的机构传动方案设计;刀具与工作台在运动中的协调性分析;) 3.整理和编写说明书一份,对图纸进行详细说明 时间安排 (1).第一天 明确任务,准备作图工具,并打扫教室。 (2). 第二、三天 在老师的指导下确定构建尺寸,作出机构简图,并进行运动分析,并作出一个周期的位移、速度、加速度随转角变化的图像 (3). 第四、五天 在老师的指导下,完成工作台的机构传动方案设计,并画出传动示意图。 (4). 第六、七、八天 < 自己总结,整理并编写说明书一份
| 机械原理课程设计任务书学院名称:专业:年级: 学生姓名: 学号: 指导教师: 一、设计题目插床传动系统方案设计及其运动分析 二、主要内容 1)对指定的机械进行传动系统方案设计; 2)对执行机构进行运动简图设计(含必要的机构创意实验); 3)飞轮设计; ( 4)编写设计说明书。 三、具体要求 插床是用于加工各种内外平面、成形表面,特别是键槽和带有棱角的内孔等的机床(如 另:l BC/l BO2=1,工作台每次进给量0.5mm,刀具受力情况参考图2。机床外形尺寸及各部份联系尺寸如图1所示(其中:l1 =1600,l2 =1200, l3 =740, l4 =640, l5 =580, l6 =560, l7 =200, l8 =320, l9 =150, l10 =360, l11 =1200,单位均为mm,其余尺寸自定。 四、完成后应上交的材料 1) 机械原理课程设计说明书; 2) 一号图一张,内容包括:插床机构运动简图、速度及加速度多边形图、S(φ)-φ曲线、 V(φ)-φ曲线和a(φ)-φ曲线; 3) 三号坐标纸一张:Med(φ)、Me r(φ)-φ曲线; [
机械原理课程设计指导书 一、设计内容与步骤(以插床为例) 1、导杆机构的设计及运动分析 已知:行程速度系数K ,滑块5的行程H ,中心距32O O l ,比值B O BC l l 3/,各构件质心S 的 位置,曲柄每分钟转数n 1。 要求:设计导杆机构,作导杆机构的运动简图;作机构2个位置的速度多边形和加速度多 边形,对导杆机构进行运动分析,以上内容与后面动态静力分析一起画在3号图纸上(每个位 置各画一张)(参考图例);做滑块的运动线图,以上内容做在一张4号图纸上。整理说明书。 步骤: 1)设计导杆机构。按已知条件确定导杆机构的各未知参数。其中滑块5的导路y -y 的位置 可根据连杆4传力给滑块5的最有利条件来确定,即y -y 应位于B 点所画圆弧高的平分线上(见 图例1)。 2)作机构运动简图。选取长度比例尺μl )m/mm (按位置分配表所分配的2个曲柄位置作出 机构运动简图,其中1个位置用粗实线画出。 3)作速度、加速度多边形。选取速度比例尺μv )mm s /m (和加速度比例尺μa )mm s /m (2 ,用相对运 动图解法作该2个位置的速度多边形和加速度多边形,并将其结果列入下表。 4)作滑块的位置线图。根据机构的各个位置,找出滑块5上C 点的各对应位置,以位置1 为起始点,量取滑块的相应位移,取位移比例尺μs )m/mm (,作s C (t )线图。为了能直接从机 构运动简图上量取滑块位移,建议取μs =μl 。 5)绘制滑块的速度线图。列表汇集同组同学用相对运动图解法求得的各个位置的速度v C , 绘制速度v C (t )线图。 6)绘制滑块的加速度线图。列表汇集同组同学用相对运动图解法求得的各个位置的加速度 C a ,绘制加速度)(t a C 线图。 7)整理计算说明书。内容包括:已知条件与要求;所选比例尺;导杆机构设计简述;以一 个机构位置为例,说明用相对运动图解法求机构的速度和加速度的计算方法和过程,另一位置 只需画出速度和加速度线图,列出计算结果。
插床机构设计
目录 一、工作原理 3 二、设计要求 3 三、设计数据 3 四、设计内容及工作量 4 五. 设计计算过程5 (一). 方案比较与选择5 (二). 导杆机构分析与设计 6 1.机构的尺寸综合8 2. 导杆机构的运动分析9 3. 凸轮机构设计14 六. 参考文献16一、工作原理:
(1)插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄转动,再通过导杆机构使装有刀具的滑块沿导路y—y作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴上的凸轮驱动摆动从动件和其它有关机构来完成的。 (2) 二、设计要求: 电动机轴与曲柄轴平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄转速偏差为±5%。要求导杆机构的最小传动角不得小于60o;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。 导杆机构运动分析 转速n2插刀行程 H(mm) 行程速比系数K 42 100 1.65 导杆机构运动分析 从动件最大摆角? max 从动件 杆长 许用压 力角 推程运 动角δ o 远休 止角 回程 运动角 δ’o 14°124 38°58°10°58° 导杆机构运动动态静力分析 工作阻力Fmax(N) 导杆质量 m4(kg) 滑块6质量 m6(kg) 导杆4质心转动 惯量Js4(kgm2) 3200 22 70 1.1 四、设计内容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据选定的电机和执行机构的运动参数拟订机械传动方案。 3、画出机械运动方案示意图。 4、根据给定的数据确定机构的运动尺寸,用Autocad软件按1:1绘制所设计的机构运动简图。要求用图解法设计,并将设计结果和步骤写在设计说明书中。
机械原理课程设计 计算说明书 课题名称:插床机构的设计 姓名:超 院别:工学院 学号: 2012010803 专业:机械设计制造及其自动化 班级:机设1201班 指导教师:原芳 2014年6 月7日
工学院课程设计评审表
设计目录 1 机械原理课程设计任务书 (4) 1.1课程设计的目的和任务 (4) 1.2机构简介与设计数据 (4) 1.3设计容 (6) 1.4设计步骤和要求 (6) 2 机构简介与设计数据设计 (7) 1.1 插床简介 (7) 1.2 设计数据.................................................................. (8) 3 插床机构的设计及尺寸计算 (9) 3、1曲柄导杆机构的设计及尺寸计算 (9) 3、2用图解法进行机构的运动分析 (14) 3、3用图解法进行机构的动态静力分析 (18) 4 凸轮机构设计 (21) .心得与体会 (22) .参考文献 (23)
机械原理课程设计任务书 学生 超 班级 1201 学号 2012010803 位置 10 设计题目一:插床机构设计及分析 一、课程设计的目的和任务 1.课程设计的目的 机械原理课程设计是机械原理教学的一个重要组成部分。机械原理课程设计的目的在于进一步巩固和加深学生所学的机械原理理论知识,培养学生独立解决实际问题的能力,使学生对机械的运动学和动力学的分析和设计有一较完整的概念,并进一步提高电算、绘图和使用技术资料的能力,更为重要的是培养开发和创新机械的能力。 2.、课程设计的任务 用图解法对插床的连杆机构进行运动分析和动力分析,设计凸轮机构。要求画出A 1图纸一,写出计算说明书一份。 二、 机构简介与设计数据 1.插床主要由齿轮机构、导杆机构和凸轮机构等组成,如图1所示。电动机经过减速装置(图中只画出齿轮1z 、2z )使曲柄1转动,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿导路作往复直线运动,以实现刀具切削运动。为了缩短空行程时间,提高生产效率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴2O 上的凸轮驱动摆动从动件O 4D 和其他有关机构(图中未画出)来完成的。为了缩短空回形成时间,提高生产效率,要求刀具有急回运动。 在工作行程中,刀具上作用有相当大的切削阻力,在切削行程的前后各有一段0.05H (H 为刀具行程)行程,如图2所示。而在空回行程中则没有切削阻力,因此在一个工作循环中,刀具受力变化很大,从而影响了主轴的匀速运转,为减小主轴的速度波动,需采用飞轮调速,以减小电动机容量和提高切削质量。 插床机构简图如图1所示,题目数据列于表1。 图1 插床机构简图
一部分插床导杆机构综合及运动任务
————————————————————————————————作者:————————————————————————————————日期:
第一部分插床导杆机构综合及运动的任务 一、已知条件 形成速度变化系数K,铰链中心和之间的距离,滑块5的冲程H,杆长比 ,滑块5的导路方向y-y垂直于导杆3摆角的分角线,并使导杆机构 在整个行程中都能得到较小的压力角,曲柄转速及指定的相对运动图解法的作业位置。 二、基本要求 1)确定图中给出的机构相关尺寸,即需确定下列尺寸: 曲柄1的长度,导杆3的长度,连杆4的长度,固定铰 链中心到滑块5的导路y-y的距离h(此处,y-y是和铰链中心C的轨迹相重合的直线); 2)按指定的作业位置作出机构运动简图,并用相对运动图解法求滑块5的速度和加速度,质心的加速度; 3)作出滑块5的位移曲线,并用图解微分法求出速度曲线,将结果与用相对运动图解法求得的滑块速度 作比较。 三、完成内容 在计算说明书上,应完成下列内容: 1)列出基本方程式及主要运算过程和数据; 2)列出主要的求解结果(包括机构的各主要尺寸,各构件的角速度和角加速度);3)列表比较相对运动图解法和图解微分法所得的值。 第二部分插床导杆机构动态静力分析的任务
一、已知条件 插床导杆机构综合与运动分析的结果,曲柄转速,切削力的变化规律及其作用线位置;滑块5的重量及其质心的位置;导杆3具有与其运动平面相平行的对称平面,导杆3的重量,质心的位置及对其质心轴的转动惯量;不计其余活动构件的质量;不计各运动副中的摩擦。 二、基本要求 1、按指定的作业位置,求出机构各运动副中的作用力; 2、按指定的作业位置,求出加于曲柄1的平衡力矩。要求分别用力多变形法和速度多变形杠杆法求解平衡力矩,并比较所得结果,计算相对误差 式中,—用力多变形法求得的平衡力矩; —用速度多变形法求得的平衡力矩。 三、完成任务 在计算说明书上,应完成下列内容: 1、列出各构件惯性力和惯性力矩的计算结果; 2、列出各示力体的平衡方程式及未知力的求解结果; 3、列出用速度多变形杠杆法求平衡力矩 的力矩平衡方程和求解结果; 4、列表比较和,按照上面公式求得相对误差。
工程技术大学 课程设计说明书 课程名称:机械原理课程设计 院系:机械工程学院 专业班级:机自17-4 姓名:海鹏 学号: 1707010430
总评成绩及评语 评语: □经考核,该同学基本完成了课程设计的全部任务,达到任务书的训练要求。 □经考核,该同学在课程设计期间未完成设计任务。 成绩: 根据该同学完成任务情况,结合课程设计期间表现,经教研室答辩小组综合审定,该同学机械原理课程设计成绩为 教师签名
机械原理课程设计任务书(十一) 海鹏 专业 机自 班级 17-4 学号 1707010430 一、设计题目:插床齿轮机构的设计 二、系统简图: 三、工作条件 已知:齿数1Z 传动,齿轮与曲柄共轴。 四、原始数据 五、要求: 1)依据题目条件和不根切条件,计算符合的变位系数(至少5组); 2)选定一组变位系数,计算该对齿轮传动的各部分尺寸; 3)在A3纸上画出齿轮啮合图;要求:①按设计尺寸画;②作图体现:极限啮合点1N 、 2N ,啮合角α' ,四个圆b d d a d f d 和节圆d ' ,12B B ,每个齿轮画出3条渐开线 (2同1异),每条渐开线找出起始点(b b b P S e =+ )齿顶圆齿厚(1a s 2a s )。 4)编写说明书。 指导教师:席本强 曲辉 开始日期: 2019 年 7 月 10 日 完成日期: 2019 年 7 月 17 日
1数学模型 1中心距a ': 2)(21z z m a +? = ; a '=(a/5+1)?5; 2啮合角α': ; )cos(2) ()cos(21ααα?'?+= 'z z m 实αααinv z z x x inv +++=')/()(tan 22121; 3分配变位系数2 1 x x 、; 17sin 22min ≈=* αa h z min 1min min 1/)(z z z h x a -=* ; min 2min min 2/)(z z z h x a -=* ; ; αααtan 2) )((2121z z inv inv x x +-'= + 4齿轮基本参数: (注:下列尺寸单位为mm ) 齿顶高系数: 0.1=* a h 齿根高系数: 25.0=* c 齿顶高变动系数: y x x -+=21σ
机械原理课程设计任务书(十) 姓名 苑煜家 专业 液压传动与控制 班级 液压09-1 学号 0907240125 一、设计题目:插床导杆机构的设计及运动分析 二、系统简图: 三、工作条件 3位置,曲柄每分钟转数1n 。 四、原始数据 五、要求: 1)设计导杆机构; 2)显示机构两个位置; 3)作滑块的运动线图(编程设计); 4)编写说明书。 指导教师:郝志勇 席本强 开始日期: 2011 年 6 月 26 日 完成日期: 2011 年 6 月 30 日
目录1.设计任务及要求2.数学模型的建立3.程序框图 4.程序清单及运算结果5.总结和目的 6. 参考文献
1数学模型 急位夹角60°,θA 2=75mm,a=b=100mm 1.()55θt ωt = 2.5 65 5tx sin θθarctan x cos θ= ()0556x ωωcos θθy =- 3.θ1=θ 6 -180. ()()()2655655656561εx εcos θθx ωsin θθωωsin θθy ??= ---+-?? 4.连杆的角位移方案15asin θc θarcsin b -?? = ??? 5.滑块5的位移方程(ε5=0) 11asin θc d acos θbcos arcsin b -?? ??=- ?????? ? 6.BC 杆角速度61 22 a ωcos θωbcos θ=
7.滑块速度方程() 12c 62 sin θθv a ωcos θ-= 8.22 516122 22 a εcos θa ωcos θ b ωsin θεbcos θ-+= 9.2k c 22226161a b εsin θb ωcos θa εsin θa ωcos θ=+-- 2.程序框图
机械原理课程设计任务书(十一) 姓名 专业 班级 学号 一、设计题目:插床齿轮机构的设计 二、系统简图: 三、工作条件 已知:齿数1Z 传动,齿轮与曲柄共轴。 四、原始数据 五、要求: 1)选择变位系数; 2)计算该对齿轮传动的各部分尺寸; 3)A2纸上画出三对齿啮合图; 4)编写说明书。 指导教师: 开始日期: 年 月 日 完成日期: 年 月 日
1数学模型 1中心距a ': 2)(21z z m a +? = ; a '=(a/5+1)?5; 2啮合角α': ;)cos(2) ()cos(21ααα?'?+= 'z z m 实αααinv z z x x inv +++=')/()(tan 22121; 3分配变位系数2 1 x x 、; 17sin 22min ≈=* αa h z min 1min min 1/)(z z z h x a -=* ; min 2min min 2/)(z z z h x a -=* ; ; αααtan 2))((2121z z inv inv x x +-'=+ 4齿轮基本参数: (注:下列尺寸单位为mm )
齿顶高系数: 0.1=* a h 齿根高系数: 25.0=* c 齿顶高变动系数: y x x -+=21σ 分度圆直径; 11mz d = 22mz d = 基圆直径; αcos 11mz d b = αcos 22mz d b = 齿顶高: )(11σ-+=* x h m h a a )(22σ-+=*x h m h a a 齿根高: )(11x c h m h a f -+=* ) (22x c h m h a f -+=** 齿顶圆直径: 1112a a h d d += 2222a a h d d += 齿根圆直径; 1112f f h d d -= 2222f f h d d -= 节圆直径: αα'=' cos cos 1 1d d αα'=' cos cos 2 2d d 齿距: m p π= 节圆齿距: αα'='cos cos p p 基圆齿距: απcos m p b =
机械原理课程设计 设计计算说明书 设计题目插床机械设计 设计任务书 1.1 设计题目 插床 1.2 插床简介 插床是用于加工中小尺寸垂直方向的平面或直槽的金属切削机床,多用于单件或小批量生产。 为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—插刀能以数种不同速度、不同行程和不同起始位置作垂直方向的往复直线移动,且切削时插刀的移动速度低于空行程速度,即插刀具有急回现象;安装工件的工作台应具有不同进给量
的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。 1.3 设计要求及设计参数 设计要求:要求主执行机构工作行程切削平稳、压力角较小。进给机构压力角不超过许用值。 设计参数如下所示:插床机构设计3号题目参数 题号 3 主执行机构 曲柄转速n2/(r/min)50 曲柄l O2A/mm75 插刀行程H/mm120 行程速比系数K 1.8 连杆与导杆之比l BC0.55 力臂d(mm) 108 工作阻力F max(N) 10800 导杆质量m4(kg) 22 导杆转动惯量J S4(kgm2) 1.2 滑块质量m6(kg) 60 进给机构 从动件最大摆角max20 凸轮从动件杆长(mm) 130 推程许用压力角[] 推程42 回程许用压力角[] 回程50滚子半径r r(mm) 15 刀具半径r c(mm) 0.08
一:主执行机构设计与分析 1:插床机械设计参数以及相关参数计算 曲柄转速n 2/(r/min ) 曲柄长度l O2A =75mm 插刀行程H=120mm 行程速度比系数K=1.8 连杆与导杆之比l BC =0.55 力臂 d=108mm 工作阻力F=10800N 导杆4的质量m 4=22kg 导杆4的转动惯量Js4=1.1 滑块6的质量m 6=60 一、插床导杆机构的综合 1、计算极位夹角 、曲柄角速度1ω、曲柄角加速度1ε n 2=50 l O2A =75m m H=120m m K=1.8 l BC =0.55 d=108mm F=10800N m 4=22kg Js4=1.1 m 6=60 46.667θ= 1 4.922/rad s ω=
齐齐哈尔大学普通高等教育 机械原理课程设计 题目题号:插床导杆机构位置3的设计 学院:机电工程学院 专业班级: 学生姓名: 指导教师 成绩: 2013 年7月 2 日
目录 一、工作原理 二、设计要求 三、设计数据 四、设计内容及工作量 五. 设计计算过程 (一). 方案比较与选择 (二). 导杆机构分析与设计 1.机构的尺寸综合 2. 导杆机构的运动分析
一、工作原理: 插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄2转动,再通过导杆机构使装有刀具的滑块6沿导路y —y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H 中,前后各有一段0.05H 的空刀距离,工作阻力F 为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O 2上的凸轮驱动摆动从动件D O l 8 和其它有关机构(图 中未画出)来完成的。 二、设计要求: 电动机轴与曲柄轴2平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允 许曲柄2转速偏差为±5%。要求导杆机构的最小传动角不得小于60o ;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件8的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。
三、插床导杆机构设计数据 四、设计内容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸, ()4 6.0~5.0BO BC l l =。要求用图解法设计,并将 设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架O 2O 4位于同一直线位置时,滑块6的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r o 、机架8 2 O O l 和滚子半径r b ),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 6、按1:2绘制所设计的机构运动简图。
悬架系统设计步骤 在此主要是分析竞争车型的底盘布置。底盘布置首先要确定出轮胎、悬架形式、转向系统、发动机、传动轴、油箱、地板、前纵梁结构(满足碰撞)等,因为这些重要的参数,如轮胎型号、悬架尺寸、发动机布置、驱动形式、燃油种类等在开发过程中要尽可能早地确定下来。在此基础上,线束、管路、减振器、发动机悬置等才能继续下去 悬架选择 对各种后悬架结构型式进行优缺点比较,包括对后部轮罩间空间尺寸的分析比较,进行后悬架结构的选择。 常见的后悬架结构型式有:扭转梁式、拖曳臂式、多连杆式。 扭转梁式悬架 优点: 1.与车身连接简单,易于装配。 2.结构简单,部件少,易分装。 3.垂直方向尺寸紧凑。 4.底板平整,有利于油箱和后备胎的布置。 5.汽车侧倾时,除扭转梁外,有的纵臂也会产生扭转变形,起到横向稳定作用, 若还需更大的悬架侧倾角刚度,还可布置横向稳定杆。 6.两侧车轮运转不均衡时外倾具有良好的回复作用。 7.在车身摇摆时具有较好的前束控制能力。 8.车轮运动特性比较好,操纵稳定性很好,尤其是在平整的道路情况下。 9.通过障碍的轴距具有相当好的加大能力,通过性好。 10.如果采用连续焊接的话,强度较好。 缺点: 1.对横向扭转梁和纵向拖臂的连续焊接质量要求较高。 2.不能很好地协调轮迹。 3.整车动态性能对轴荷从空载到满载的变化比较敏感。 4.但这种悬架在侧向力作用时,呈过度转向趋势。另外,扭转梁因强度关系,允 许承受的载荷受到限制。 扭转梁式悬架结构简单、成本低,在一些前置前驱汽车的后悬架上应用较多。 拖曳臂式悬架 优点: 1.Y轴和X轴方向尺寸紧凑,非常有利于后乘舱(尤其是轮罩间宽度尺寸较大) 和下底板备胎及油箱的布置。 2.与车身的连接简单,易于装配。 3.结构简单,零件少且易于分装; 4.由于没有衬套,滞后作用小。 5.可考虑后驱。 缺点: 1.由于沿着控制臂相对车身转轴方向控制臂较大的长宽比,侧向力对前束将产生 不利的影响。 2.车身摇摆(body roll)对外倾产生不利影响;(适当的控制臂转轴有可能改善外 倾的回复能力,但这导致轮罩间宽度尺寸的减小。)
插床机构设计与分析 输入设计参数 行程速比系数K=1.47 插刀行程H=127.00mm 曲柄长度LAB=23.00mm 连杆长度LDE =102.00mm 导路距离Le =320.00mm 曲柄角速度ω=8.00rad/s 曲柄角加速度ε=0.00rad/s2 输出计算参数 极位夹角θ=34.251°导杆长LCD=215.645mm 中心距LAC=78.108mm 弓形高 b =9.561mm 机架长Le=288.972mm 最大压力角αmax=2.686° 插床机构结构示意 插刀运动线图 插刀最大切削速度V1max=0.394m/s 刨刀最大回程速度V2max=0.722m/s 插刀最大切削加速度a1max=4.451m/s*s 刨刀最大加速度a2max=6.072m/s*s 转角(°) 位移S(mm) 速度(m/s) 加速度(m/s2) 000 0.00 0.001 3.587
002 0.04 0.016 3.474 003 0.08 0.024 3.419 004 0.14 0.031 3.365 005 0.22 0.039 3.313 006 0.31 0.046 3.261 007 0.42 0.053 3.211 008 0.54 0.060 3.162 009 0.68 0.067 3.114 010 0.83 0.073 3.067 011 1.00 0.080 3.021 012 1.18 0.087 2.976 013 1.38 0.093 2.932 014 1.59 0.099 2.888 015 1.81 0.106 2.846 016 2.05 0.112 2.805 017 2.30 0.118 2.764 018 2.56 0.124 2.724 019 2.84 0.130 2.685 020 3.13 0.136 2.646 021 3.43 0.141 2.609 022 3.74 0.147 2.572 023 4.07 0.152 2.535 024 4.41 0.158 2.499 025 4.76 0.163 2.464 026 5.12 0.169 2.429 027 5.50 0.174 2.395 028 5.88 0.179 2.361 029 6.28 0.184 2.328 030 6.68 0.189 2.295 031 7.10 0.194 2.263 032 7.53 0.199 2.231 033 7.97 0.204 2.199 034 8.42 0.209 2.167 035 8.88 0.213 2.136 036 9.35 0.218 2.106 037 9.83 0.223 2.075 038 10.33 0.227 2.045 039 10.83 0.232 2.015 040 11.34 0.236 1.986 041 11.86 0.240 1.956 042 12.38 0.245 1.927 043 12.92 0.249 1.898 044 13.47 0.253 1.869
插床机构综合与传动系统设计 目录 题目及设计要求 (2) 一、设计题目 (2) 二、设计数据与要求 (3) 三、设计任务 (3) 设计: (4) 一、确定各构件的运动尺寸,绘制机构简图 (4) 1、插削机构的设计: (4) 2、送料机构(凸轮机构)的设计: (4) 二、假设曲柄1等速转动,画出滑块C的位移和速度的变化规律曲线(插削机构的运 动学分析) (9) 1)位置分析 (9) 2)角速度分析 (10) 3)角加速度分析 (10) 三、在插床工作过程中,插刀所受的阻力变化曲线如图2所示,在不考虑各处摩擦、 其他构件重力和惯性力的条件,分析曲柄所需的驱动力矩 (14) 四、确定电动机的功率和转速。 (16) 五、取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量。 (17) 六、感想与建议。 (17) 七、参考文献。 (17)
题目及设计要求 一、设计题目 插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图6-15为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y -y 作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴上的凸 轮驱动摆动从动件 和其他有关机构(图中未画出)来实现的。画出)来实现的。 针对图3-30所示的插床机构运动方案,进行执行机构的综合与分析,并进行传动系统结构设计。 Q 图3-30 插床机构运动方案示意图
提供全套,各专业毕业设计 插床机构设计
目录 一、工作原理 3 二、设计要求 3 三、设计数据 3 四、设计内容及工作量 4 五. 设计计算过程5 (一). 方案比较与选择5 (二). 导杆机构分析与设计 6 1.机构的尺寸综合8 2. 导杆机构的运动分析9 3. 凸轮机构设计14 六. 参考文献16
一、工作原理: (1)插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄转动,再通过导杆机构使装有刀具的滑块沿导路y—y作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴上的凸轮驱动摆动从动件和其它有关机构来完成的。 (2) 二、设计要求: 电动机轴与曲柄轴平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄转速偏差为±5%。要求导杆机构的最小传动角不得小于60o;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。 导杆机构运动分析 转速n2插刀行程 H(mm) 行程速比系数K 42 100 1.65 导杆机构运动分析 从动件最大摆角? max 从动件 杆长 许用压 力角 推程运 动角δ o 远休 止角 回程 运动角 δ’o 14°124 38°58°10°58° 导杆机构运动动态静力分析 工作阻力Fmax(N) 导杆质量 m4(kg) 滑块6质量 m6(kg) 导杆4质心转动 惯量Js4(kgm2) 3200 22 70 1.1 四、设计内容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据选定的电机和执行机构的运动参数拟订机械传动方案。 3、画出机械运动方案示意图。
目录 一、概述 (1) 1、设计目的 (1) 2、设计任务 (1) 3、设计方法 (1) 二、牛头刨床机构简介 (2) 1、牛头刨床的组成机构 (2) 2、牛头刨床的工作原理 (3) 三、导杆机构方案设计 1、拟定运动方案 2、方案机构的选择 四、传动导杆机构的运动分析 1、位置分析 2、速度分析 3、加速度分析 五、齿轮机构设计 1、齿轮的设计要求 2、齿轮计算 六、课程设计自我评价与心得 七、参考文献
一、概述 1、设计目的 机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。机械原理课程设计目的在于巩固和加深所学的理论知识,培养学生独立解决有关本课程实际问题的能力,使学生对于常用机构(连杆机构、凸轮机构和齿轮机构)设计和运动分析有比较完整的认识,。以及熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,进一步提高设计计算和解决工程技术问题的能力 2、设计任务 本课程设计要求在规定的时间里按题目任务要求完成设计工作,并上交设计说明书一份。设计说明书内容包括: 1.题目介绍。 2.机构方案。绘制原理图,说明原动件,从动件等的工作原理。 3.设计说明。自由度计算,主要尺寸计算、选取等。 4.特点。说明设计的特色,主要优缺点等。 3、设计方法 机械原理课程设计的主要方法有图解法、解析法、实验法。 ①图解法是利用已知的条件和某些几何关系,通过几何作图求得的结果。此法概念清晰、形象直观,但是作图繁琐,精度不高。 ②解析法是通过建立数学模型,编制框图和程序,借助计算机求出结果。该方法精度高、速度快、能解决较复杂的问题。 ③实验法是通过建立模型、计算机动态演示与仿真、CAD等,使设计的产品得以实现。
机构传动方案设计 设计方案要发散思维,参考资料文献关于机构传动方案设计知道怎么做吗?下面是XX为大家整理了机构传动方案设计,希望能帮到大家! 这种方法是从具有相同运动特性的机构中,按照执行构件所需的运动特性进行搜寻。当有多种机构均可满足所需要求时,则可根据上节所述原则,对初选的机构形式进行分析和比较,从中选择出较优的机构。 常见运动特性及其对应机构 连续转动定传动比匀速平行四杆机构、双万向联轴节机构、齿轮机构、轮系、谐波传动机构、摆线针轮机构、摩擦轮传动机构、挠性传动机构等变传动比匀速轴向滑移圆柱齿轮机构、混合轮系变速机构、摩擦传动机构、行星无级变速机构、挠性无级变速机构等非匀速双曲柄机构、转动导杆机构、单万向连轴节机构、非圆齿轮机构、某些组合机构等往复运动往复移动曲柄滑块机构、移动导杆机构、正弦机构、移动从动件凸轮机构、齿轮齿条机构、楔块机构、螺旋机构、气动、液压机构等往复摆动曲柄摇杆机构、双摇杆机构、摆动导杆机构、曲柄摇块机构、空间连杆机构、摆动从动件凸轮机构、某些组合机构等
间歇运动间歇转动棘轮机构、槽轮机构、不完全齿轮机构、凸轮式间歇运动机构、某些组合机构等间歇摆动特殊形式的连杆机构、摆动从动件凸轮机构、齿轮-连杆组合机构、利用连杆曲线圆弧段或直线段组成的多杆机构等间歇移动棘齿条机构、摩擦传动机构、从动件作间歇往复运动的凸轮机构、反凸轮机构、气动、液压机构、移动杆有停歇的斜面机构等预定轨迹直线轨迹连杆近似直线机构、八杆精确直线机构、某些组合机构等曲线轨迹利用连杆曲线实现预定轨迹的多杆机构、凸轮-连杆组合机构、行星轮系与连杆组合机构等特殊运动要求换向双向式棘轮机构、定轴轮系等超越齿式棘轮机构、摩擦式棘轮机构等过载保护带传动机构、摩擦传动机构等…………利用这种方法进行机构选型,方便、直观。设计者只需根据给定工艺动作的运动特性,从有关手册中查阅相应的机构即可,故使用普遍。 任何一个复杂的执行机构都可以认为是由一些基本机构组成的,这些基本机构具有下图所示的进行运动变换和传递动力的基本功能。