科普:无人机的六大动力来源
来源:宇辰网
如今,无人机的出现为人们的生活提供了很多便利和乐趣,已经被广泛应用到社会中的各行各业。但其续航时间短一直是让研究人员头疼的一个问题。据外媒不久前报道,目前无人机主要靠六种动力完成工作:
1. Batteries 锂离子电池
锂电池/图来源网络
目前,市场上的大多数无人机都使用锂离子电池(LiPos)维持动力,根据负载的多少,飞行时间也有所不同,一般情况下,飞行时间大概20分钟。锂离子电池具有能量密度高、更小型化、超薄化、轻量化,以及高安全性和低成本等多种明显优势,是一种新型电池。但是因为动力锂离子电池的特性是,体积越大
容量越大,重量也越重,因此要增加容量才能增加续航,而增大容量,重量又会随之增加,而飞行时间就会大大缩短。
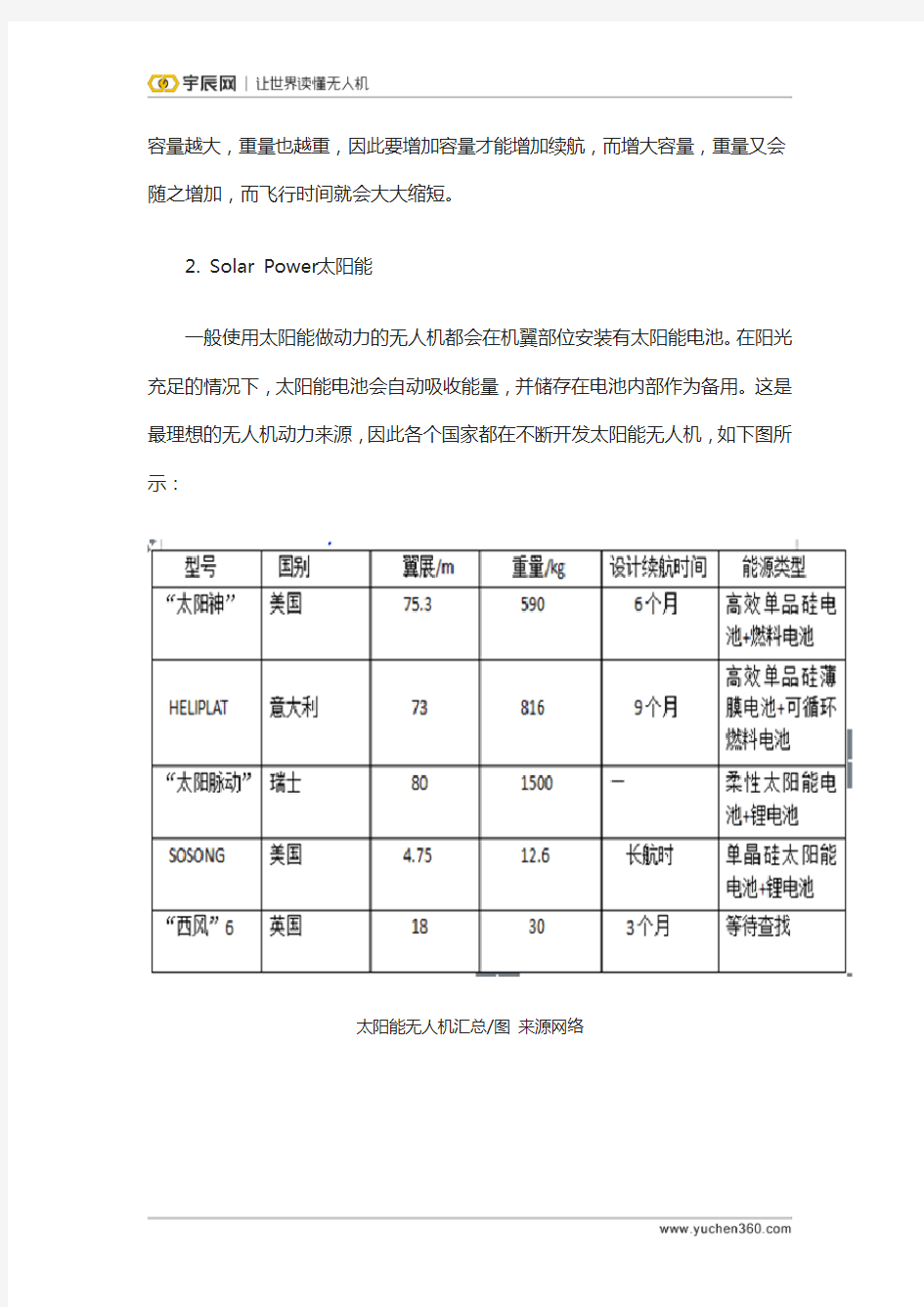
2. Solar Power太阳能
一般使用太阳能做动力的无人机都会在机翼部位安装有太阳能电池。在阳光充足的情况下,太阳能电池会自动吸收能量,并储存在电池内部作为备用。这是最理想的无人机动力来源,因此各个国家都在不断开发太阳能无人机,如下图所示:
太阳能无人机汇总/图来源网络
3. Hydro Fuel Cell氢燃料电池
氢燃料电池/图来源网络
不久前,英国Intelligent Energy公司已经研制出了一种氢燃料电池,这种无人机氢燃料电池加满燃料差不多只有1.6千克,相比锂电池还更轻。这种电池能够让无人机在天上连续飞行2个小时,并且在着陆之后可以立即补充燃料,继续飞行,甚至可以实现无人机的不间断作业。氢燃料电池相对于锂电池的优势在于续航时间长、低温环境下更稳定等。但其劣势也相当明显,氢燃料电池在工作时会产生很高的热能,如果长期处于高温环境下,极易发生事故。
https://www.doczj.com/doc/fe4704452.html,bustion Engine内燃机
内燃机/图来源网络
使用内燃机发电可支持无人机以100千米/每小时的速度飞行1小时,但也存在问题,如噪音大。此外,由于无人机内有可燃气体,也存在安全隐患。
5.Tethered有线电缆
使用有线电缆供电的无人机能够“长久”的工作,而且也加快了无人机向电脑传输数据的速度,安全性也更高。缺点就是由于受到有线连接的限制,无法完成远距离飞行。
https://www.doczj.com/doc/fe4704452.html,ser Transmitter激光发射器
使用激光发射器为无人机供电,从地面发射的激光光束被机身上的接收器转化成动力,几乎可以支持无人机一直工作。与太阳光相比,激光在能量传输上更具优势。例如其照射时间和角度能够人为的控制,从而为无人机提供24小时不
间断的电力。激光发射器在提供无人机动力时具有的效果显著、安全系数高的特点,使其备受研发群体的青睐。
无人机技术论文 摘要 本文以某型固定翼无人机为研究对象,主要研究了基于常规PID和智能PID的无人机飞行控制律的设计问题,首先,建立了无人机的六自由度数学模型,并运用小扰动线性化方法和系数冻结法分别建立了无人机纵向与横侧向系统的线性化方程:其次,介绍了一些常用的PID 控制器参数整定法和智能PID控制的基本思想,作为飞行控制律设计的理论基础:再次,分别采用常规PID和智能PID进行了纵向系统与横侧向系统控制的设计,并针对不同空域的一些典型的状态点进行了大量的仿真研究。仿真结果表明,我们所设计的常规PID控多数情况下能满足要求,智能PID控制器则具备更强的鲁棒性,能适应不同空域中更多的状态点。 关键词:无人机,常规PID(自动控制),智能PID(自动控制),飞行控制律, 无人机飞控系统的仿真研究 ABSTRACT The primary purpose of this the conventional PID control and intelligent PID control strategies to the design of the UA V’s(Unmanned Aerial Vehicle)fight control law. First of all,the UA V’5six一degrees一of-freedom(6一DOF)math linearized.Then some basis the ores and the physiques about conventional PID control and intelligent PID control are mentioned followed by a Profound research on the control semen of the log attitudinal land lateral control system of the UA V.conventional PID and intelligent PID control strategists competitively plied to the design of the flight control law of the UA V’5fourfundamentalflighteontrolmode,in eluding Pithing angle control mode,altitude holding mode,roll in gangle control mode and yaw angle control mode. Finally,an amount of simulation 15 designed to validate effectiveness of the flight 。o一troll law based on conventional PID and intelligent PID control strategies.The results of the simulation show that the conventional PID flight control law effective,and the intelligent PID flight control law superior to the forme rone. Keywords: UAV , The conventional PID,Intelligent PID,Flight Control Law , 前言:
无人机设计手册及主要技术 内容简介 独家《无人机设计手册》分上、下两册共十二章。 上册包括无人机系统总体设计,气动、强度、结构设计,动力装置,发射与 回收系统,飞行控制与管理系统。 下册包括机载电气系统,指挥控制与任务规划,测控与信息传输,有人机改装无人机,综合保障设计,可靠性、维修性、安全性和环境适应性以及无人机飞行试验等。有关无人机任务设备、卫星中继通信的设计以及正在发展的无人机技术等内容,有待手册再版时编入,使无人机设计手册不断成熟和丰富。 适用人群 本手册是国内第一部较全面系统阐述无人机设计技术的工具书,不仅可作为 无人机的设计参考,也可以作为院校无人机教学、无人机行业的工程技术人员和管理人员的参考书,并可供无人机部队试验人员使用。希望本手册的出版能对我国无人机研制工作的技术支持有所裨益。 作者简介 祝小平,现任西北工业大学无人机所总工程师,主要从事无人机总体设计、飞行控制与制导系统设计等研究工作。主持了工程型号、国防预研等国家重点项目多项,获国家和部级科学技术奖9项,其中国家科技进步一等奖1项,国防科技进步一等奖4项,获技术发明专利10项,荣立“国防科技工业武器装备型号研制”个人一等功,发表论著150多篇。先后入选国家级“新世纪百千万人
才工程”、国防科技工业“人才工程”和教育部“新世纪优秀人才支持计 划”,获得“国防科技工业百名优秀博士、硕士”、“国防科技工业有突出贡献的中青年专家”、“陕西省有突出贡献专家”和“科学中国人(2009)年度人物” 等荣誉称号。 无人机相关GJB标准- -融融网 gjb 8265-2014无人机机载电子测量设备通用规范 gjb 4108-2000军用小型无人机系统部队试验规程 gjb 5190-2004无人机载有源雷达假目标通用规范 gjb 7201-2011舰载无人机雷达对抗载荷自动测试设备通用规范 gjb 5433-2005无人机系统通用要求 gjb 2347-1995无人机通用规范 gjb 6724-2009通信干扰无人机通用规范 gjb 6703-2009无人机测控系统通用要求 gjb 2018-1994无人机发射系统通用要求 无人机主要技术 一、动力技术 续航能力是目前制约无人机发展的重大障碍,业内人士也普遍认为消费级多 旋翼续航时间基本维持在20min左右,很是鸡肋。逼得用户外出飞行不得不携 带多块电池备用,造成使用操作的诸多不便,为此有诸多企业在2016年里做出 了新的尝试。 1. 氢燃料电池
龙源期刊网 https://www.doczj.com/doc/fe4704452.html, 无人机动力系统研究 作者:田汉曹著明 来源:《海峡科技与产业》2017年第07期 摘要:无人机系统中的动力装置是无人机的主要关键技术之一,它直接影响到无人机的 性能、成本和可靠性。现在主要用于军用和民用,具有较好的发展趋势。就目前来看,无人机的动力还是有3种不同的设备来提供。无刷电机因其具有高效率(通常大于80%)、低能耗、低噪音等优势,是本文的主要研究对象。通过对电机的结构及原理进行深入的研究和了解。知道了无刷直流电机采用的电刷装置不是一般传统的装置,且换向器也不一样,转子的材料也有了改变,可以说从性能上看是现在最理想的调速电机。 关键词:无人机;动力系统;无刷电机;研究 1 无人机动力系统 动力系统对于无人机来说是至关重要的。无人机动力系统主要部件是电机(负责带动螺旋桨),电调(负责控制电机转速电池),电池(负责给动力系统)及螺旋桨(将发动机转动功率转化为推进力或升力的装置)。电机由电动机主体和驱动器组成,无刷电机在我们国家因其日益成熟的技术、广泛的应用和产量、价格的原因,在短时间内,得到了快速的发展。又因为它的生产成本比较低、技术的快速发展已经在多个领域得到了应用。从电动遥控车到电动遥控船再到电动模型飞机,目前它正进入模型领域的各个层面,,无处不在。之所以说动力系统是至关重要的,是因为动力系统各个部分之间是否匹配、动力系统与整机是否匹配,直接影响到整机效率、稳定性。 无人机动力系统原理,如图1所示。 无人机的电机主要以无刷电机为主,一头用于固定在飞机架的电机座上,一头用于固定螺旋桨,通过螺旋桨的旋转产生向下的推力。不同规格、功率的电机配合不同大小、负载的机架,效率对于电机来说才是最主要的,而不是说越大越好。单独的电机是不能工作的,需要电调的配合,它可以控制电机的转速。和电机一样,不同规格的电调配合着不同负载的动力系统,虽然电调用大了没太大影响,但是效率就会下降,因为电调大了,质量也就重了;是,同样以高效率为第一目直接产生推力的部件------螺旋桨。相互匹配的电机、电调和螺旋桨在一起搭配时,可以在相同的推力下耗用更少的电量,这样就可以提高无人机的续航能力。锂聚合物电池是现在无人机主要使用的电池,它具有能量密度大、重量轻、耐电流数值较高等优势,而这些优势对于无人机来说都是较为适合的。虽然手机领域也有部分使用锂聚合物电池,但就充、放电能力而言远远不及无人机的这些电池。由于这些电池被使用在无人机的动力系统,所以也会被叫做“动力电池”。无刷电机的主要优缺点为势如下: 电机结构如图2所示:
旋翼无人机动力系统选型及测试方案研究 发表时间:2018-11-02T21:41:10.733Z 来源:《电力设备》2018年第17期作者:沈滨薛骅淳孙嫱 [导读] 摘要:近年来,科学技术日新月异,旋翼无人机在研发过程中获得了不小成就,备受社会各界广泛关注和运用。 (国网漳州供电公司福建漳州 363000) 摘要:近年来,科学技术日新月异,旋翼无人机在研发过程中获得了不小成就,备受社会各界广泛关注和运用。本文将主要围绕其动力体系构成和搭配准则展开分析,并探究螺旋桨选型测验方案和结果。 关键字:旋翼无人机;动力系统;测试方案 引言 因为旋翼无人机动力体系,其中螺旋桨与无刷电机的指数直接决定着样机承重、航时等关键指标的明确,所以在样机制定开始前要展开选型检测,搭配良好的旋翼无人机动力组合。从实际获得的数据可知,相同生产厂家类似规格螺旋桨所造成的航时偏差可高达14%,这足以说明此检测进程的重要性。 一、旋翼无人机动力体系构成和搭配准则 对于电网无人机动力体系来讲,其主要包括4个部分,分别是螺旋桨,电子调速器、电池、电机。而电子调速器标准电压要大于电池电压,电调标准电流要小于电池最高电流,电机最高电压要大于电池实际电压,电机最高电压要大于电调最大电压。 (一)关于电池 小微型无人机一般将化学电池当做驱动电源。一般涵盖Ni-MH(镍氢电池)、Li-Poly(锂聚合物)、锂离子动力电源以及NiOH-MnO2(镍锰电池)等等。其中NiOH-MnO2与Ni-MH这两种电池因为能量密度较少,现阶段几乎被Li-Poly电池所顶替。其中锂电池的基础构成单位是s,此电池的一个单位常规电压为3.7v。这一机型采用格氏ace,Li-Poly电池,实际电压是22.3v(6s),容量是15000mAH,有着15c 的放电倍率[1]。 (二)关于电机 动力电机一般划分成两种:一种是无刷电动机,另一种是有刷电动机。其中后者速率非常低,在无人机业内中早已被舍弃。前者电机构造简易,重量轻、应用便捷,能让无人机的噪音与红外特点减少,并且还可供应和内燃机相仿的比功率。此电机利用的是电子变向,其是输出速率与功率较大,噪音却较少,生命周期较长且没有其余显著弊端。结合最高功率、最高电流、重量等方面考虑,这一机型采用无刷电机w6050,最高电流是48A,符合锂电7-11s要求。 (三)关于电子调速器 其又叫做电调,能调解电机转速,完成对无人机承载转变的自主协调。无刷电调输进端有两条线,连接正负极电源,输出端有三条线和电机衔接,具体是依赖三条线连续转变磁场来启动转子转动。这一机型运用Xrotroprohv80A电子调速器,准许连续电流80A,瞬时电流每10s,110A。 (四)关于螺旋桨 对于螺旋桨而言,其主要有两种类型,一种是变距螺旋桨,一种是定距螺旋桨。其中后者无法转变桨距,通常运用在小型、轻型无人机内。大中型无人机可依据实际状况装置前者,提一次提升可操控性。依据电机kv数值的差异,所搭配的螺旋桨规格也有所不同。采购电机过程中,一般生产厂家均会表明所搭配螺旋桨的尺寸。若是其规模过小,便无法产生商家承诺的最大化推力。螺旋桨规模过大,便易于导致电机升温,发生退磁状况,为电机带来无法弥补的损伤。 二、无刷电机的构造和原理 (一)构造 无刷电机在构造上与有刷电机有着一些共同点,比如都有转子与定子,然而和有刷单机的区别在于,构造和其完全不同。有刷电机的转子为线圈绕组,定子属于永磁磁钢,且和动力输出轴相衔接,但无刷电机将二者对换,并且联合外部共同与输出轴衔接,实质则是清除了所用在有刷电机顶替互换电磁场的变向电刷,所以叫做无刷电机[2]。 (二)原理 换句话来讲,无刷电机主要依赖改变输进到无刷电机定子线圈中的电流波形变化频率与运作规律,在绕组线圈的附近打造一个围绕电机几何核心转动的磁场,在此磁场的影响下,动力转子中的永磁磁钢开始运动。而定子是利用硅钢片构成的,任一冲槽中均是由相应的线圈所构成,永磁钢是转子。在相关人员为无刷电机内的定子送电时,霍尔传感器便会得知定子的地点,之后任何一次变向时,都会出现三个有差别的绕组,首组是正向送电,次组与之相反,最后一组则不对其送电,这样便出现了转矩。此种电动机完成电子变向的元件是半导体开关,也就是把之前的触及式变向器与电刷用电分支开关器替代。所以无刷直流电动机具备显著的优点,因此其的利用率较高,备受人们所青睐和喜爱,普遍运用在电子仪器、自动化办公设施、高档录音座领域中,这是其稳定性、机械噪音小、无变向火花等优点。无刷直流电动机的构成主要包括地点传感器、多机绕组定子、永磁体转子等等。地点传感器依据转子地点的转变,顺着相应次序针对定子绕组的电流展开交换。但地点传感器输出掌控的电子开关线路供应定子绕组的作业电压。其一般有三大种类,分别是:电磁式、光电式以及磁敏式。 三、螺旋桨选型检测方案和结果 (一)检测方案 市场中不同螺旋桨生产厂家商品价钱和质量良莠不齐。依据电机商家介绍的26寸螺旋桨,市场中出现率较高的型号一般有2612、2680以及2610和2692四类,价钱自300元左右的某牌子电动榉木桨到1200元左右的jxf碳纤维配对桨均有销售。因此选购jxf牌子的2692配对桨、2610的榉木桨以及某牌子的2612与2680榉木桨深入检测其功效。在s型拉力传感器内获得拉力信息,在交直流数字钳形表内得到电流数值。 (二)检测结果 通过检测结果可发现,jxf企业生产的螺旋桨较其余牌子来讲,其速率明显占据上风。即使大螺距螺旋桨常常拥有大量拉力,然而其同
燃料电池无人机的动力系统设计 摘要:燃料电池具有无噪声,无污染,高效率等特点,因此将燃料电池运用于长航时无人机是其发展的一个方向。本文针对小型低空的燃料电池无人机,根据其燃料电池无人机总体设计要求,对其动力系统进行设计分析,概述了燃料电池无人机动力系统的设计的基本流程,主要分析设计内容包括:动力系统设计,燃料电池的选型,燃料电池放电特性曲线分析,电机选型及与螺旋桨配合分析,燃料电池动力系统总体性能分析 关键词:燃料电池氢动力系统无人 1引言 无人机是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器,其飞速发展和广泛运用是在海湾战争后,以美国为首的西方国家首先认识到无人机在战争中的作用,竞相将高新技术应用于无人机的研制与发展上。同时美国宇航局(NASA)的最新报告指出:21世纪的航空动力系统应当具备高效率,智能化,低噪音和零排放等特性,航空业必将进行革命性的创新[1]。为满足未来航空发展的更高要求,NASA确认了一系列新型推进系统,其中包括基于燃料电池的电推进系统。除此之外,燃料电池所具有的无噪音的特点,如运用于无人机上,将大大降低无人机的噪音。因此,将燃料电池运用于无人机上将是无人机发展的一个必然趋势。目前,美国、欧盟和韩国等已相继研制出相关的燃料电池无人机并已试飞成功。此外,美国和德国已在进行以燃料电池为动力的载人飞机的相关研制工作。2005年5月,AeroVironment公司成功试飞第一架采用液氢燃料电池的无人机[2]--―全球观察者‖(GlobalObserver)。该无人机的翼展长达15米,可以在平流层连续飞行7天,适用于通讯中继站或进行远程监控。2006年佐治亚大学成功将一功率500w的燃料电池运用于一架翼展约6.58米的无人机上。该飞机最大起飞重量为24.9公斤,续航时间约为45分钟[3]。 本文根据某型燃料电池无人机总体设计要求,设计与之匹配的燃料电池动力系统,并进行验证。 2动力推进系统设计 PEMFC燃料电池将氢气罐中的氢气和空气中的氧气转化为电能,并通过电能管理系统分配于电动机及无人机其他电子设备中。系统中的遥控信号接受器负责接收地面控制信号,调节电流输出,控制无人机动作等。电动机驱动螺旋桨为飞机产生推力。本设计燃料电池无人机动力推进系统[6]组成如图1所示。 图1燃料电池动力系统组成 3电池选型及性能测试分析
旋翼无人机动力系统选型及测试方案 由于旋翼无人机动力系统——无刷电机、螺旋桨参数直接关系到样机航时、载重等重要指标,故在样机试制前应进行选型测试,确定较优的旋翼无人机动力组合。从实测数据可得出,同厂家相近规格螺旋桨所导致的航时差距可达13.5%。由于本测试样本有限,实际数据可能更大,继而充分证明该测试过程的必要性。 标签:旋翼无人机;无刷电机;螺旋桨;航时 1 旋翼无人机动力系统组成及选配原则 植保无人机动力系统由四个部分构成:电池、电机、电子调速器和螺旋桨。其中电池电压不能超过电子调速器额定电压;电池最大电流应大于电调额定电流。电池电压不能超过电机最大电压。电调最大电压不能超过电机最大电压。 1.1 动力部件——电池 小微型无人机主要以化学电池作为动力电源。主要包括镍氢(Ni-MH)电池、镍锰(NiOH-MnO2)电池、锂聚合物(Li-Poly)、锂离子动力电源等。前两种电池由于能量密度较低,目前基本上被锂聚合物动力电池所代替。锂电池的基本组成单位为S,锂电池的一个单位标准电压是3.7伏。本机型选用格氏ACE锂聚合物电池,其电压为6S(22.2V),容量为16000mAh,放电倍率为15C。 1.2 动力部件——电机 动力电机可以分为两类:有刷电动机和无刷电动机。有刷电动机由于效率较低,在无人机领域已被淘汰。无刷电机结构简单、重量轻、使用方便,可使无人机的噪声和红外特征很小,同时又能提供与内燃机不相上下的比功率[1]。无刷电机采用的是电子换向,其输出功率和效率较高,同时噪音小、寿命较长并无其他明显缺点[2]。综合考虑重量、最大功率、最大电流、力效等因素。本机型选定无刷电机W6050,最大电流为47A,支持6-12S锂电。 1.3 动力部件——电子调速器 电子调速器(简称:电调)可以调节电机转速,实现对无人机负载变化的自动调节。无刷电调输入端是2根线,接正负极电源;输出需要3根线与电机相连,原理是靠3根线不停地改变磁场以驱动转子转动;本机型使用XRotor Pro HV 80A电子调速器,允许持续电流80A,瞬间电流100A(10秒)。 1.4 動力部件——螺旋桨 螺旋桨分为定距螺旋桨和变距螺旋桨。定距螺旋桨不能改变桨距,一般用于轻型、微型无人机。大型、小型无人机可以视情况安装变距螺旋桨提高可操作性。
无人机设计手册及主要 技术 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
无人机设计手册及主要技术 内容简介 独家《无人机设计手册》分上、下两册共十二章。 上册包括无人机系统总体设计,气动、强度、结构设计,动力装置,发射与回收系统,飞行控制与管理系统。 下册包括机载电气系统,指挥控制与任务规划,测控与信息传输,有人机改装无人机,综合保障设计,可靠性、维修性、安全性和环境适应性以及无人机飞行试验等。有关无人机任务设备、卫星中继通信的设计以及正在发展的无人机技术等内容,有待手册再版时编入,使无人机设计手册不断成熟和丰富。适用人群 本手册是国内第一部较全面系统阐述无人机设计技术的工具书,不仅可作为无人机的设计参考,也可以作为院校无人机教学、无人机行业的工程技术人员和管理人员的参考书,并可供无人机部队试验人员使用。希望本手册的出版能对我国无人机研制工作的技术支持有所裨益。 作者简介 祝小平,现任西北工业大学无人机所总工程师,主要从事无人机总体设计、飞行控制与制导系统设计等研究工作。主持了工程型号、国防预研等国家重点项目多项,获国家和部级科学技术奖9项,其中国家科技进步一等奖1项,国防科技进步一等奖4项,获技术发明专利10项,荣立“国防科技工业武器装备型号研制”个人一等功,发表论着150多篇。先后入选国家级“新世纪百千万人才工程”、国防科技工业“511人才工程”和教育部“新世纪优秀
人才支持计划”,获得“国防科技工业百名优秀博士、硕士”、“国防科技工业有突出贡献的中青年专家”、“陕西省有突出贡献专家”和“科学中国人(2009)年度人物”等荣誉称号。 无人机相关GJB标准-融融网 gjb8265-2014无人机机载电子测量设备通用规范 gjb4108-2000军用小型无人机系统部队试验规程 gjb5190-2004无人机载有源雷达假目标通用规范 gjb7201-2011舰载无人机雷达对抗载荷自动测试设备通用规范 gjb5433-2005无人机系统通用要求 gjb2347-1995无人机通用规范 gjb6724-2009通信干扰无人机通用规范 gjb6703-2009无人机测控系统通用要求 gjb2018-1994无人机发射系统通用要求 无人机主要技术 一、动力技术 续航能力是目前制约无人机发展的重大障碍,业内人士也普遍认为消费级多旋翼续航时间基本维持在20min左右,很是鸡肋。逼得用户外出飞行不得不携带多块电池备用,造成使用操作的诸多不便,为此有诸多企业在2016年里做出了新的尝试。 1.氢燃料电池 高原地区的高海拔会导致低含氧量、低气压和低气温,这些因素对无人机工作的影响非常大,特别是动力系统方面。今年5月底,武汉众宇动力团队在新