
倒立摆机器人的模型
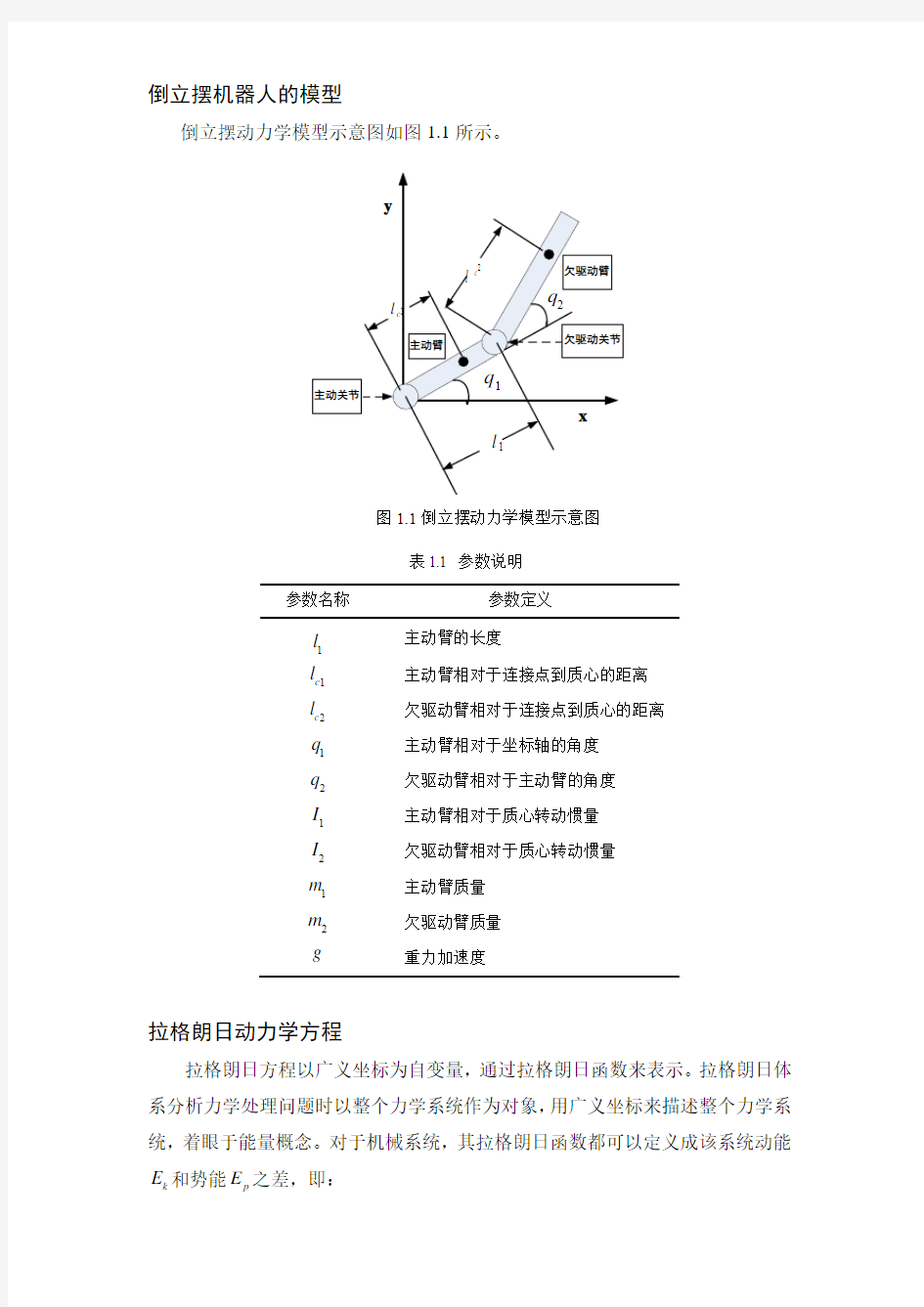
倒立摆动力学模型示意图如图1.1所示。
图1.1倒立摆动力学模型示意图
表1.1 参数说明
参数名称
参数定义
1l 主动臂的长度
1c l
主动臂相对于连接点到质心的距离
2c l 欠驱动臂相对于连接点到质心的距离
1q
主动臂相对于坐标轴的角度
2q 欠驱动臂相对于主动臂的角度
1I 主动臂相对于质心转动惯量
2I 欠驱动臂相对于质心转动惯量
1m 主动臂质量
2m 欠驱动臂质量
g
重力加速度
拉格朗日动力学方程
拉格朗日方程以广义坐标为自变量,通过拉格朗日函数来表示。拉格朗日体系分析力学处理问题时以整个力学系统作为对象,用广义坐标来描述整个力学系统,着眼于能量概念。对于机械系统,其拉格朗日函数都可以定义成该系统动能
k E 和势能p E 之差,即:
k p
L E E =-
(1.1)
系统的动能和势能可以用任意选取的坐标系来表示。系统的动力学方程(第
二类拉格朗日方程)为:
d L L
dt q
q τ??=
-?? (1.2)
由于势能不含速度项,因此动力学方程也可以写成:
p
k k E E E d dt q q q
τ???=-+
??? (1.3)
由此可见,对于Pendubot 系统,其拉格朗日运动方程则为:
()()()1,,[ 0]()()()1,2T i i i d K q q K q q P q dt q q q
i τ???
-+=??=?
(1.4)
其中,(),K q q
为Pendubot 系统的动能之和,()P q 为Pendubot 系统的势能总和。摆臂受到的力矩为τ,只有摆臂与电机相连接的主动关节受力,而另一个关节是欠驱动的。由于两杆均为刚体,所以摆臂的动能与势能可根据每一根杆的总质量与相对于重心的惯量来唯一确定。
欠驱动机械臂动力学模型
根据式(1.4),分析Pendubot 摆臂的动能和势能。计算平移动能的一般表达
式为2
2
mv K =。由上图可知,系统两个摆臂的角速度可以表示为:
11212ωωq
q q ==+ , (1.5)
对于系统的主动臂,其平移动能可以直接描述成以下形式:
2211111
2
c K m l q =
(1.6)
由于系统的势能大小与机械臂的质心位置有关系,这里可以用y 坐标来表示摆臂的其位置高度,于是势能可以直接描述为:
1111 sin()c P m l g q =
(1.7)
对于系统的欠驱动臂,要先得到其质心位置的笛卡儿坐标表达式,然后通过微分处理得到关节角速度。其中,欠驱动臂的质心位置用下式来表示:
211212211212cos()cos()sin()sin()
c c x l q l q q y l q l q q =++=++ (1.8)
那么,通过对该位置进行微分处理,即可得到其速度的笛卡儿坐标分量为:
()()()()()211121************sin sin ()cos cos c c x
l q q l q q q q y
l q q l q q q q =--++=+++ (1.9)
于是可得欠驱动臂在x 和y 方向上速度分量的平方和为:
()()2
2222222
112121212211222cos ()c c v l q l q q q q l l q q q q =+++++ (1.10)
因此,系统欠驱动臂的平移动能可以表示为:
()()()22
2222221121212122112122cos 2
c c K m l q l q q q q l l q q q q =
++??+?+?+ (1.11)
由于摆臂长度是已知的,可以得到欠驱动臂的势能为:
()()2211212sin sin c P m g l q l q q =++????
(1.12)
同时,由于Pendubot 系统运动的特殊性,这里注意到系统的动能组成中,除了常规的平移动能外,还存在旋转动能部分,那么根据式(1.6)可以得到系统的旋转动能为:
[]122112122
22101111001122T v I I
I q K Q I I Q q q
I I q +????????
??=+=????????????
??????
?? (1.13)
根据式(1.1)给出的拉格朗日算子的描述方法,可以由上述系统动能和势能的关系得到Pendubot 系统的拉格朗日算子,表示为:
1212v L K P K K K P P =-=++--
(1.14)
为了得到系统的动力学方程,根据式错误!未找到引用源。,对上式
错误!未找到引用源。做关于1q 和1q
的微分处理,可得: ()()()(){
}
(){}
()22211121122122122112122211222222
1121212212112
2
2
2
1222221222111
)2cos cos 2cos cos sin (c c c c c c c c c c c L
m l m l m l m l l q m l l q I I I d L m l m l l l l q I I dt m l
l l q I m l l q L
m q
q q q q q
q
q q q l q
q q q ?=++++?++++???=+++++?????+++-??
?=-? ()()2112212cos sin()c m l g q m l g q q +-+ (1.15)
由以上的各微分项,根据第二类拉格朗日方程,本文可以直接得到系统中主动臂的关节力矩表达式为
(){}
(){}
()()()()111222
1c121c21c221212
22
c2
1c222221c22221c22121c12112c212d τdt 2cos cos sin 2sin g cos g sin()L L
q
q m l l I I m l l l q m l
l q l l q l l q q
l m l l q l I q
m q m q
q m m q q ??=
-????=+++++????+++-??-++++ (1.16)
将式(1.14)对2q 和2q
求微分,得到欠驱动臂的关节动力学方程: ()()()()()()22
2221222122222222221222122222122122
2212211222122
cos ()cos sin()sin cos c c c c c c c c c L m l m l l q I m l I d L m l m l l q I m l I m l l q q dt L
m l l q q
q q m l g q q q q
q q q q q q ???=++++??????=++++-????=-+-+? (1.17)
于是可以得到欠驱动臂的关节动力学方程为:
()()()()222
222212221222222122122120cos sin cos c c c c c d L L
dt q
q m l m l l q I m l I m l l q q
l g q q m q q
??=-????=++++??+++ (1.18)
可以将式(1.16)和式(1.18)简化描述成如下形式:
()()(),D q q
C q q q G q τ++= (1.19)
其中各项可表示为:
()()()111221222212121,00d d D q d d hq
hq hq C q q hq G q ??ττ??
=??
??
+??=??-????=??
????=??
??
上式中的各个参数表达式如下:
2221111212112212
212212211222222222
[2cos()][2cos()]c c c c c c d m l m l l l l q I I d d m l l l q I d m l I =+++++==++=+
2122sin()c h m l l q =-
()111211*********cos()cos()cos()
c c c m l m l g q m l g q q m l g q q ??=+++=+
这里需要注意的是,如果系统动力学模型表示成式(1.19),那么()D q 和
(),C q q
并非两个完全独立的矩阵,两者之间存在关系()()2,D q C q q - ,为反对称矩阵。其实际物理意义是摆臂动能的微分量与摆臂重力矩和驱动机构力矩的功率输入总和相等。即:
1[()]2T
d q Dq q
G q dt
τ??=-?? (1.20)
因此,对于任意时刻都有:
T 102q D C q ??-≡ ???
(1.21)
本文得到Pendubot 系统动力学表达式如式(1.19)所示,在系统的实际应用中,为了方便参数计算与系统实现,引入以下五个代换参数表达式:
22111211
222223212
41121522
c c c c c m l m l I m l I m l l m l m l m l θθθθθ=++=+==+= (1.22)
因此,式(1.19)中的各项可以表示为:
()123223223222cos()cos()cos()q q D q q θθθθθθθθ+++??
=??+??
(1.23)
()322322321321
sin()sin()sin(),sin()0q q
q q
q q C q q
q q
θθθθ---??=????
(1.24)
()42512512cos()cos()cos()g q g q q G q g q q θθθ++??
=??+??
(1.25)
综上所述,本文已经得到了Pendubot 系统的动力学模型,并将系统中的七个未知参量整理替换成了如式(1.22)所示五个系统参数,可以通过能量守恒的方法对其进行辨识。
欠驱动机械臂系统控制器设计模型建立
将式(1.19)中所描述的Pendubot 系统的动力学方程通过简单的线性变换改写成如下的状态方程形式:
()()112()[,]q
D q C q q q G q q τ-??=--????
(1.26)
引入状态变量,令11213242x q x x q q q x ==== ,,,得到系统方程如下的表示形式:
()()()()(,,)x
t F x t u t f x b x u ==+ (1.27)
则可根据系统的输入输出关系,得到Pendubot 系统的状态方程为:
()()[]
121132434221(====)()=T
x
x x
f x b x u x
x x
f x b x u y x x ++ , (1.28)
上式中的各项具体表达式如下:
22233232324122
123333513324122
1233322223323324322233312
sin() [2cos() 2()]
()2cos(2)2cos()cos()2cos()
+
2cos(2)2sin()[cos()()cos()]
()cos(2)22x x x x x f x x g x x x g x x x x x x x x f x x θθθθθθθθθθθθθθθθθθθθθθ++=
--+---++=
+-+35133341322
2
233312333122232324132223331215132412233312
cos()cos()2 cos()cos()cos(2)2cos(2)22sin()[()]cos(2)22[ cos()cos()]
cos(2)2g x x x g x x x x x x x x x g x x g x x θθθθθθθθθθθθθθθθθθθθθθθθθθθ+-+-+-+++
+-+-+
+- (1.29)
2
122
1233323322
233312
2()2cos(2)2[cos()]
()cos(2)2b x x x b x x θθθθθθθθθθθ=
--+=+-
式(1.28)所描述的状态方程形式是十分具有代表性的,这种形式可以被视作一类欠驱动系统的规范表达式,不仅本文的研究对象Pendubot 可表示为这种类型的状态方程,Acrobot 系统、吊车系统和单摆系统等欠驱动系统的模型也都可以被整理成该形式。
通过设计参数辨识程序,获得参数辨识结果。 实验结果:
123450.0215,0.0120,0.0102,0.1516,0.0742θθθθθ=====
图1.2 Pendubot 模块
LQR 方法设计控制器
本实验采用LQR 最优控制方法设计平衡控制器来控制Pendubot ,使之在不稳定平衡点附近保持平衡。
图1.3控制系统结构框图
为设计平衡控制器,首先必须将Pendubot 的非线性运动方程线性化,同时设计一个具有线性模型的全状态反馈控制器。泰勒级数近似表达式用于线性化。
()()()()||r r r r
a a r r x u r x u r f f f x u f x u x x u u x u ??=+
-+-??,,,, (1.30)
其中,x 为状态向量,u 为Pendubot 唯一控制输入。r r x u ,分别为Pendubot 的平衡状态向量及控制输入。平衡控制器是将Pendubot 控制在不稳定平衡点,因此
()
a f x u ,为0,因此我们所要做的是找到偏微分矩阵并求其在平衡点的值。其中
()()()11111223332244()()a x f x a x b x u f x f x u x
f x a x b x u f x ????????????+?
?????===???????
?????+?????? ,
(1.31)
在平衡情况下,电机提供的转矩主要克服两根杆重力相对于支撑点的转矩,因此Pendubot 的平衡点可作如下定义:
4113 cos()
2
r r r r u g x x x θπ
=+=
(1.32)
将Pendubot 的动力学方程对于状态向量求偏微分则有
1
11112342222222212341
2343
33312344
4441
2
3
444441
2
3
401000001f f f f x x x x f f f f f f f f x x x x x x x x f A f f f f x x x x x f f f f x x x x f f f f x x x x ??????
???????????????????????????????????????==
=?????????????
????????????????????????
????????
?? (1.33)
将Pendubot 的动力学方程对于控制输入求偏微分则有
12234400f u f f f u u B f u u f f u u ???
??????????????????????===????????
??
???????????????????
(1.34)
根据不同平衡点的不同12r r x x ,,并结合前面应用系统辨识出的参数常量的值,就可以得到系统平衡点处的线性化模型形式:
u x
Ax B =+ (1.35)
得到线性化模块后,根据LQR 方法设计全状态反馈控制器u Kx =-。
Pendubot 系统LQR 控制方法仿真
在上平衡情况下,13002
r r r x x u π
=
==,,。将该初始条件代入得:
r1r 2r 3r 0r 0πx ,x 0,x 0,x 02u 010068.3381048.7828
0f A |0001x 66.30010150.5904
00176.0104f B |0u
325.9452=====?
?
??-??
?==????
?-??
????
??
?==?????-??
(1.36)
与上平衡控制器的设计方法相同,这里输出量可以认为是2q ,方程
()T T J y Qy u Ru dt ∞
=+?中的各个参量取值与下平衡控制器设计时相同。
最终得到上平衡控制器参数
[-10.6384 -1.8882 -9.4483 -1.1704]T K =
(1.37)
图1.4 LQR 控制算法Pendubot 上平衡Simulink 仿真程序
图1.5倒立摆系统上平衡仿真曲线
角度(度)
1
2
3
4
56
7
8
9
10
时间(s)
角度(度)
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书 课程名称:自动控制理论 设计题目:直线一级倒立摆控制器设计院系:电气工程系 班级:0806152 设计者:段大坤 学号:1082710118 指导教师:郭犇 设计时间:2011.6.13-2011.6.20 哈尔滨工业大学教务处
哈尔滨工业大学课程设计任务书
1.1数学模型建立 数学模型的建立过程需要用到以下参数: M 小车质量 m 摆杆质量 b 小车摩擦系数 l 摆杆转动轴心到杆质心的长度 I 摆杆惯量 F 加在小车上的力 x 小车位置 φ摆杆与垂直向上方向的夹角 θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下),其中 θπφ=+ 分析小车水平方向所受的合力可得: Mx F bx N =-- (1) 由摆杆水平方向受力分析可得: 2 2(sin )d N m x l dt θ=+ (2) 即 2cos sin N mx ml ml θθθθ=+-(3) 将(3)代入(1)可得系统的第一个运动方程: 2()cos sin M m x bx ml ml F θθθθ+++-= (4) 对摆杆垂直方向的合力进行分析可得: ()2 2cos d P mg m l dt θ-=- (5) 即: 2sin cos P mg ml ml θθθθ-=+(6) 力矩平衡方程如下: sin cos Pl Nl I θθθ--=(7) 将(6)(7)合并可得第二个运动方程:
2()sin cos I ml mgl mlx θθθ++=- (8) 1、微分方程模型 由于θπφ=+,当摆杆与垂直向上方向之间的夹角φ和1(弧度)相比很小时,即1 φ时,可进行如下近似处理:cos 1θ=-,sin θφ=-,2 ( )0d dt θ=。用u 代表被控对象的输入力F ,将模型线性化可得系统的微分方程表达式: 2 ()()I ml mgl mlx M m x bx ml u φφφ?+-=?? ++-=?? (9) 2、传递函数模型 设初始条件为0,,对(9)进行拉普拉斯变换可得: 222 22 ()()()()()()()()() I ml s s mgl s mlX s s M m X s s bX s s ml s s U s ?+Φ-Φ=??++-Φ=??(10) 输出为角度φ,解方程组(10)的第一个方程可得: 22()()[]()I ml g X s s ml s +=-Φ (11) 或2 22(()()s mls X s I ml s mgl Φ= +-)(12) 令小车加速度v x =则有 22()()()s ml V s I ml s mgl Φ=+- 将(11)式代入方程组(10)的第二个方程可得 222 222()()()[]()[]()()()I ml g I ml g M m s s b s s ml s s U s ml s ml s +++-Φ+-Φ-Φ= 以u 为输入量,以摆杆摆角φ为输出的传递函数为: 2 2 432()()()() ml s s q b I ml M m mgl bmgl U s s s s s q q q Φ=+++--
扫地机器人项目 规划方案 规划设计/投资方案/产业运营
摘要 扫地机器人行业发展以来技术进步明显。最初的扫地机器人通过随机碰撞的方式来进行清扫,清扫效率低;随着技术的发展,出现了使用陀螺仪和加速度计导航的局部规划类产品;随后又出现了使用激光导航LDS-SLAM或视觉导航V-SLAM的全局规划产品。 该扫地机器人项目计划总投资10104.62万元,其中:固定资产投资8478.18万元,占项目总投资的83.90%;流动资金1626.44万元,占项目总投资的16.10%。 本期项目达产年营业收入15651.00万元,总成本费用12344.95 万元,税金及附加178.54万元,利润总额3306.05万元,利税总额3940.60万元,税后净利润2479.54万元,达产年纳税总额1461.06万元;达产年投资利润率32.72%,投资利税率39.00%,投资回报率24.54%,全部投资回收期5.58年,提供就业职位240个。
扫地机器人项目规划方案目录 第一章总论 一、项目名称及建设性质 二、项目承办单位 三、战略合作单位 四、项目提出的理由 五、项目选址及用地综述 六、土建工程建设指标 七、设备购置 八、产品规划方案 九、原材料供应 十、项目能耗分析 十一、环境保护 十二、项目建设符合性 十三、项目进度规划 十四、投资估算及经济效益分析 十五、报告说明 十六、项目评价 十七、主要经济指标
第二章投资背景和必要性分析 一、项目承办单位背景分析 二、产业政策及发展规划 三、鼓励中小企业发展 四、宏观经济形势分析 五、区域经济发展概况 六、项目必要性分析 第三章产品规划方案 一、产品规划 二、建设规模 第四章项目选址可行性分析 一、项目选址原则 二、项目选址 三、建设条件分析 四、用地控制指标 五、用地总体要求 六、节约用地措施 七、总图布置方案 八、运输组成 九、选址综合评价
第 1 页 目录 摘要............................................................................................... 3 1.一阶倒立摆的概述.. (4) 1.1倒立摆的起源与国内外发展现状................................. 4 1.2倒立摆系统的组成......................................................... 5 1.3倒立摆的分类:............................................................. 5 1.4倒立摆的控制方法:..................................................... 5 1.5本文研究内容及安排..................................................... 6 1.6系统内部各相关参数为:............................................. 6 2.一阶倒立摆数学模型的建立. (7) 2.1概述................................................................................. 7 2.2数学模型的建立............................................................. 8 2.3一阶倒立摆的状态空间模型:....................................11 2.4实际参数代入:........................................................... 12 3.定量、定性分析系统的性能.. (13) 3.1,对系统的稳定性进行分析........................................ 13 3.2 对系统的稳定性进行分析:...................................... 15 4.状态反馈控制器的设计. (16) 4.1反馈控制结构............................................................... 16 4.2单输入极点配置........................................................... 17 4.3利用MATLAB 编写程序 ............................................ 20 5.系统的仿真研究,校验与分析. (22) 5.1使用Matlab 中的SIMULINK 仿真............................ 22 6.设计状态观测器,讨论带有状态观测器的状态反馈系统的
扫地机器人结构及控制系统设计 自动清扫机器人是当今服务机器人领域一个热门的研究方向。从理论和技术上讲,自动清扫机器人比较具体地体现了移动机器人的多项关键技术,具有较强的代表性,从市场前景角度讲,自动清扫机器人将大大降低劳动强度、提高劳动效率,适用于宾馆、酒店、图书馆、办公场所和大众家庭。因此开发自动清扫机器人既具有科研上的挑战性又具有广阔的市场前景。 家用智能清扫机,包括计算机、传感器、电机与动力传动机构、电源、吸尘器、电源开关、操作电位计等,在清扫机的顶部共设有三个超声波距离传感器;清扫机底部前方边沿安装有5个接近开关,接近开关与超声波距离传感器一起,构成清扫机测距系统;清扫机装有两台直流电机;在清扫机的底部安装有吸尘器机构。自动清扫机器人的功能是自动完成房间空旷地面尤其是家居空旷地面的清扫除尘任务,打扫前,要把房间里的物体紧靠四周墙壁,腾出空旷地面。清扫机完成的主要功能:能自动走遍所以可进入的房间,可以自动清扫吸尘,可在遥控和手控状态下清扫吸尘。 本文所介绍的自动清扫机器人的总体布局方案如图1所示,前后两轮为万向轮,左右两轮为驱动轮。驱动轮设计采用两轮独立且各由两台步进电动机驱动的转向方式,通过控制左右两轮的速度差来实现转向。考虑到机器人实际应用的实用性,本驱动系统设计成一个独立的可方便替换的模块,当机器人驱动系统发生故障时,只需简单步骤就可以对驱动部分进行替换。同时为了机器人能够灵活的运动,从动轮选用万向轮。 下图为自动清扫机的三维立体图:
自动清扫机器人车箱体采用框架式结构。从下至上分隔成三个空间:第一层装配各运动部件的驱动电机、传动机构;第二层为垃圾存储空间;第三层装配机器人控制系统、接线板、
第四章工业机器人设计思考题与习题 1.工业机器人的定义是什么?操作机的定义是什么? 答:我国国家标准GT/T12643-1997《工业机器人词汇》将工业机器人定义为“是一种能自动控制、可重复编程、多功能、多自由度操作机,能搬运物料、工件或夹持工具,用以完成各种作业”;将操作机定义为“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。 2.工业机器人由哪几部分组成?并比较它与数控机床组成的区别。 答:工业机器人由操作机、驱动单元和控制装置组成。数控机床一般由机床本体、伺服系统和数控装置组成。二者组成的区别主要在于机械本体,机器人操作机通常由末端执行器、手腕、手臂和机座组成,而数控机床机械本体通常包含主运动部件、进给运动部件、支承部件、冷却润滑、排屑等部分。 3.工业机器人的基本功能和基本工作原理是什么?它与机床主要有何相同和不同之处? 答:工业机器人基本功能是提供作业所需的运动和动力,其基本工作原理是通过操作机上各运动构件的运动,自动地实现手部作业的动作功能及技术要求。 在基本功能及基本工作原理上,工业机器人与机床有如下相同之处:二者的末端执行器都有位姿变化要求;二者都是通过坐标运动来实现末端执行器的位姿变化要求。二者的主要不同之处有:机床是以直角坐标形式运
动为主,而机器人是以关节形式运动为主;机床对刚度、精度要求很高,其灵活性相对较低;而机器人对灵活性要求很高,其刚度、精度相对较低 4.工业机器人的结构类型有哪几类?各种类型的特点如何? 答:工业机器人的结构类型有如下四类: 关节型机器人,其特点是关节一般为回转运动副,灵活性好,工作空间范围大(同样占地面积情况下),但刚度和精度较低;球坐标型机器人,其特点是按球坐标形式动作(运动),灵活性好,工作空间范围大,但刚度、精度较差;圆柱坐标型机器人,其特点是按圆柱坐标形式动作,灵活性较好,工作空间范围较大,刚度、精度较好;直角坐标型机器人,其特点是按直角坐标形式动作,刚度和精度高,但灵活性差,工作空间范围小。 5.如何选择和确定机器人的坐标系?分析图4-5所示的PUMA机器人的坐标系是如何确定的? 答:坐标系按右手定则确定。绝对坐标系X-Y-Z,机座坐标系X0-Y0-Z0和机械接坐标系Xm-Ym-Zm的取法参考GB-T16977-1997《工业机器人坐标系和运动命名》。 关节坐标系Xi-Yi-Zi以下简明的方法确定: (1)确定基准状态—般可取机器人处于机械原点时的状态作为基准状态。也可以取机器人各关节轴线(或大部分关节轴线)与机座直角坐标系轴线平行时的状态作为基准状态。(2)关节坐标轴轴线位置的选取取Zi轴与i关节的运动方向一致。对于回转关节,取Zi轴与i关节的轴线重合;对于移动关节,取Zi轴与i关节的运动方向平行(或重合)。(3)关节坐标方向的选取采用右手坐标系,规定Xi、Zi轴的方向,Yi轴方向就自然确定了。原则上Xi、Zi轴的正向可视方便任意选取,但应尽可能使各坐标
控制系统课程设计---直线一级倒立摆控制器设计
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:控制系统设计课程设计 设计题目:直线一级倒立摆控制器设计 院系: 班级: 设计者: 学号: 指导教师:罗晶周乃馨 设计时间:2013.9.2——2013.9.13
哈尔滨工业大学课程设计任务书 姓名:院(系):英才学院 专业:班号: 任务起至日期:2013 年9 月 2 日至2013 年9 月13 日 课程设计题目:直线一级倒立摆控制器设计 已知技术参数和设计要求: 本课程设计的被控对象采用固高公司的直线一级倒立摆系统GIP-100-L。 系统内部各相关参数为: M小车质量0.5 Kg ;m摆杆质量0.2 Kg ;b小车摩擦系数0.1 N/m/sec ;l摆杆转动轴心到杆质心的长度0.3 m ;I摆杆惯量0.006 kg*m*m ;T采样时间0.005 秒。 设计要求: 1.推导出系统的传递函数和状态空间方程。用Matlab 进行阶跃输入仿真,验证系统的稳定性。 2.设计PID控制器,使得当在小车上施加0.1N的脉冲信号时,闭环系统的响应指标为: (1)稳定时间小于5秒;
(2)稳态时摆杆与垂直方向的夹角变化小于0.1 弧度。 3.设计状态空间极点配置控制器,使得当在小车上施加0.2m的阶跃信号时,闭环系统的响应指标为:(1)摆杆角度θ和小车位移x的稳定时间小于3秒 (2)x的上升时间小于1秒 (3)θ的超调量小于20度(0.35弧度) (4)稳态误差小于2%。 工作量: 1. 建立直线一级倒立摆的线性化数学模型; 2. 倒立摆系统的PID控制器设计、MATLAB仿真及 实物调试; 3. 倒立摆系统的极点配置控制器设计、MATLAB仿 真及实物调试。
扫地机器人项目规划设计方案 规划设计/投资分析/实施方案
报告说明— 该扫地机器人项目计划总投资11756.27万元,其中:固定资产投资9916.15万元,占项目总投资的84.35%;流动资金1840.12万元,占项目总投资的15.65%。 达产年营业收入17938.00万元,总成本费用13549.85万元,税金及附加218.68万元,利润总额4388.15万元,利税总额5212.09万元,税后净利润3291.11万元,达产年纳税总额1920.98万元;达产年投资利润率37.33%,投资利税率44.33%,投资回报率27.99%,全部投资回收期5.07年,提供就业职位304个。 扫地机器人行业发展以来技术进步明显。最初的扫地机器人通过随机碰撞的方式来进行清扫,清扫效率低;随着技术的发展,出现了使用陀螺仪和加速度计导航的局部规划类产品;随后又出现了使用激光导航LDS-SLAM或视觉导航V-SLAM的全局规划产品。
目录 第一章项目概况 第二章投资单位说明 第三章项目背景及必要性 第四章投资建设方案 第五章项目选址可行性分析第六章土建工程分析 第七章工艺先进性分析 第八章项目环境影响情况说明第九章职业保护 第十章项目风险应对说明 第十一章节能评估 第十二章项目进度方案 第十三章项目投资情况 第十四章项目经营效益 第十五章评价及建议 第十六章项目招投标方案
第一章项目概况 一、项目提出的理由 扫地机器人行业发展以来技术进步明显。最初的扫地机器人通过随机 碰撞的方式来进行清扫,清扫效率低;随着技术的发展,出现了使用陀螺 仪和加速度计导航的局部规划类产品;随后又出现了使用激光导航LDS-SLAM或视觉导航V-SLAM的全局规划产品。 二、项目概况 (一)项目名称 扫地机器人项目 (二)项目选址 xx产业示范园区 项目建设方案力求在满足项目产品生产工艺、消防安全、环境保护卫 生等要求的前提下尽量合并建筑;充分利用自然空间,坚决贯彻执行“十 分珍惜和合理利用土地”的基本国策,因地制宜合理布置。对周围环境不 应产生污染或对周围环境污染不超过国家有关法律和现行标准的允许范围,不会引起当地居民的不满,不会造成不良的社会影响。 (三)项目用地规模 项目总用地面积36511.58平方米(折合约54.74亩)。
第1章人工智能概述课后题答案 1.1什么是智能?智能包含哪几种能力? 解:智能主要是指人类的自然智能。一般认为,智能是是一种认识客观事物和运用知识解决问题的综合能力。 智能包含感知能力,记忆与思维能力,学习和自适应能力,行为能力 1.2人类有哪几种思维方式?各有什么特点? 解:人类思维方式有形象思维、抽象思维和灵感思维 形象思维也称直感思维,是一种基于形象概念,根据感性形象认识材料,对客观对象进行处理的一种思维方式。 抽象思维也称逻辑思维,是一种基于抽象概念,根据逻辑规则对信息或知识进行处理的理性思维形式。 灵感思维也称顿悟思维,是一种显意识与潜意识相互作用的思维方式。 1.3什么是人工智能?它的研究目标是什么? 解:从能力的角度讲,人工智能是指用人工的方法在机器(计算机)上实现智能;从学科的角度看,人工智能是一门研究如何构造智能机器或智能系统,使它能模拟、延伸和扩展人类智能的学科。 研究目标: 对智能行为有效解释的理论分析; 解释人类智能; 构造具有智能的人工产品; 1.4什么是图灵实验?图灵实验说明了什么? 解:图灵实验可描述如下,该实验的参加者由一位测试主持人和两个被测试对象组成。其中,两个被测试对象中一个是人,另一个是机器。测试规则为:测试主持人和每个被测试对象分别位于彼此不能看见的房间中,相互之间只能通过计算机终端进行会话。测试开始后,由测试主持人向被测试对象提出各种具有智能性的问题,但不能询问测试者的物理特征。被测试对象在回答问题时,都应尽量使测试者相信自己是“人”,而另一位是”机器”。在这个前提下,要求测试主持人区分这两个被测试对象中哪个是人,哪个是机器。如果无论如何更换测试主持人和被测试对象的人,测试主持人总能分辨出人和机器的概率都小于50%,则认为该机器具有了智能。 1.5人工智能的发展经历了哪几个阶段? 解:孕育期,形成期,知识应用期,从学派分立走向综合,智能科学技术学科的兴起
沈阳工程学院 课程设计 设计题目:三自由度微型直角坐标工业机器人模型设计 系别自控系班级测本081 学生姓名步勇捷学号 2008310110 指导教师祝尚臻职称讲师 起止日期:2012年 1 月 2 日起——至 2012 年 1 月13 日止 - I -
沈阳工程学院 课程设计任务书 课程设计题目:三自由度直角坐标工业机器人设计 系别自动控制工程系班级 学生姓名学号 指导教师职称讲师 课程设计进行地点: F430 任务下达时间: 2011年 12月31日 起止日期:2012 年 1 月2日起——至 2012 年 1 月13日止教研室主任年月日批准 - II -
三自由度直角坐标工业机器人设计 1 设计主要内容及要求 1.1 设计目的: 1了解工业机器人技术的基本知识以及单片机、机械设计、传感器等相关技术。 2初步掌握工业机器人的运动学原理、传动机构、驱动系统及控制系统并应用于工业机器人的设计中。3通过学习,掌握工业机器人的驱动机构、控制技术,并使机器人能独立执行一定的任务。 1.2 基本要求 1要求设计一个微型的三自由度的直角坐标工业机器人; 2要求设计机器人的机械机构(示意图),传动机构、控制系统、及必需的内外部传感器的种类和数量布局。 3要有控制系统硬件设计电路。 1.3 发挥部分 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选; (2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 顺序阶段日期计划完成内容备注 1 2012.1. 2 讲解主要设计内容,布置任务打分 2 2012.1. 3 检查框图及初步原理图完成情况,讲解及纠正错误打分 3 2012.1. 4 检查机械结构设计并指出错误及纠正;打分 4 2012.1. 5 继续机械机构和传动机构设计打分 5 2012.1. 6 进行控制系统设计打分 6 2012.1.9 检查控制系统原理图设计草图打分 7 2012.1.10 完善并确定控制系统打分 8 2012.1.11 指导学生进行驱动机构的选择打分 9 2012.1.12 进行传感器的选择和软件流程设计打分 10 2012.1.13 检查任务完成情况并答辩打分 - III -
哈尔滨工业大学 控制科学与工程系 控制系统设计课程设计报告
姓名:院(系): 专业:自动化班号: 任务起至日期: 2014 年9 月9 日至 2014 年9 月20 日 课程设计题目:直线一级倒立摆控制器设计 已知技术参数和设计要求: 本课程设计的被控对象采用固高公司的直线一级倒立摆系统GIP-100-L。 系统内部各相关参数为: M小车质量0.5kg; m摆杆质量0.2kg; b小车摩擦系数0.1N/m/sec; l摆杆转动轴心到杆质心的长度0.3m; I摆杆惯量0.006kg*m*m; T采样时间0.005秒。 设计要求: 1.推导出系统的传递函数和状态空间方程。用Matlab进行阶跃输入仿真,验证系统的稳定性。 2.设计PID控制器,使得当在小车上施加0.1N的脉冲信号时,闭环系统的响应指标为: (1)稳定时间小于5秒; (2)稳态时摆杆与垂直方向的夹角变化小于0.1弧度。 3.设计状态空间极点配置控制器,使得当在小车上施加0.2m的阶跃信号时,闭环系统的响应指标为: (1)摆杆角度错误!未找到引用源。和小车位移x的稳定时间小于3秒 (2)x的上升时间小于1秒 (3)错误!未找到引用源。的超调量小于20度(0.35弧度) (4)稳态误差小于2%。 工作量: 1.建立直线一级倒立摆的线性化数学模型; 2.倒立摆系统的PID控制器设计、Matlab仿真及实物调试; 3.倒立摆系统的极点配置控制器设计、Matlab仿真及实物调试。
哈尔滨工业大学 (1) 控制系统设计课程设计报告 (1) 一.实验设备简介 (3) 二.直线一阶倒立摆数学模型的推导 (6) 2.1概述 (6) 2.2数学模型的建立 (7) 2.3一阶倒立摆的状态空间模型: (9) 2.4实际参数代入: (10) 三.定量、定性分析系统的性能 (11) 3.1 对系统的稳定性进行分析 (11) 3.2 对系统的稳定性进行分析: (12) 四. 实际系统的传递函数与状态方程 (13) 五. 系统阶跃响应分析 (14) 六.一阶倒立摆PID控制器设计 (15) 6.1 PID控制分析 (15) 6.2 PID控制参数设定及MATLAB仿真 (17) 6.3 PID控制实验 (18) 七.状态空间极点配置控制器设计 (19) 7.1 状态空间分析 (20) 7.2 极点配置及MA TLAB仿真 (21) 7.3 利用爱克曼公式计算 (21) 八.课程设计心得与体会 (22) 一.实验设备简介 倒立摆控制系统:Inverted Pendulum System (IPS) 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。 倒立摆是进行控制理论研究的典型实验平台。倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。
《机器人技术》讨论 ——机器人设计 姓名:毛振卿田宇杜家正吉书靖 讨论组的每人贡献:毛振卿15% 田宇40% 杜家正30% 吉书靖15% 指导教师:李艳文 2017年9月
目录 1 机器人系统的设计方法 (1) 1.1 机器人系统设计的基本原则 (1) 1.1.1机器人设计的整体性原则 (1) 1.1.2控制系统设计优先于机械结构设计(理论设计优先于实际设计)原 则 (1) 1.2机器人系统设计的阶段 (1) 1.2.1总体方案设计 (1) 1.2.2详细设计 (1) 1.2.3制造、安装、调试和编写设计文档 (3) 2 机器人系统的表达方法 (3) 2.1 位姿描述 (3) 2.2 运动轨迹 (3) 3 应用举例 (3) 3.1设计目的和任务 (3) 3.2机器人系统所在工作环境 (4) 3.3机器人系统的工作要求 (4) 3.4机器人的自由度及运动范围 (5) 3.4.1. 初步分析 (5) 3.4.2. 仔细分析 (5) 3.4.3. 确定技术参数 (5) 3.5控制系统总体方案 (5) 3.6驱动方式的选择 (6) 3.7机械部分设计 (7) 3.7.1. 采用关节型操作机 (7) 3.7.2. 腰部结构设计 (7) 3.7.3. 臂部结构设计 (7) 3.7.4. 腕部结构设计 (7) 3.7.5. 传动部分 (7)
摘要:机器人系统是一个典型的完整机电一体化系统,是一个包括机械结构、控制系统、传感器等的整体。对于机器人这样一个结合了机械、电子、控制的系统,在设计时首先要考虑的是机器人的整体性、整体功能和整体参数,然后再对局部细节进行设计。 前言:本报告研究了机器人系统的设计方法,需要考虑的各方面因素,从总体到细节,以及对于机器人系统的表达方式。最后给出了理论在实际方面的应用案例。 1机器人系统的设计方法 1.1机器人系统设计的基本原则 1.1.1机器人设计的整体性原则 (1)机器人系统任何一个部件或者子模块的设计都会对机器人的整体功能和性能产生重要的影响。 (2)机器人的工作环境对机器人的整体设计也有较大影响。如果机器人用在宇宙空间的环境里,那么无论是机械结构设计还是控制系统都要考虑温度的变化、重力的影响或者电磁干扰强度等;若机器人工作在颠簸的环境,那么机械结构及控制系统的整体抗振则是设计时要注意的;若机器人用于医疗领域,则对机器人的噪声污染有着严格的要求。 1.1.2控制系统设计优先于机械结构设计(理论设计优先于实际设计)原则 设计机器人之初,首先考虑的是机器人要实现的功能,然后根据功能要求来设计机器人的性能参数。控制系统的设计更多的是对现有资源的整合和集成,总体方案设计完成之后,先确定控制系统的基本方案,在进行理论推导及实验仿真等验证是否满足设计要求后,根据控制硬件的尺寸才能进行机械结构设计。 这一设计原则的缺点是机械设计部分放在最后,机械加工周期影响了机器人的总体研制速度,总体设计周期比较长。 1.2机器人系统设计的阶段 机器人系统的设计一般可以分成以下三个阶段: 1.2.1总体方案设计 首先明确机器人的设计目的,根据设计目的确定机器人的功能要求。 然后由功能要求设计者就可以明确机器人的设计参数。设计参数对机器人而言是表征设计方案的关键物理参数,其可以表示为机器人的各个子模块组件。讲设计参数以集合的方式表示则可以表述为总体的设计方案。 最后是进行方案比较,在初步提出的若干方案中通过对工艺生产、技术和价值分析之后选择最佳方案。 1.2.2详细设计 在总体方案确定之后,根据控制系统设计优先于机械结构设计原则,首先要做
扫地机器人(自动打扫机)的设计方案 1.绪论 随着现代社会生活节奏的加快,人们或忙于工作,或享受生活,时间越来越宝贵,所以不会把它浪费在整理家务和打扫卫生方面。收入水平的不断提高使得人们对生活质量的要求越来越高,高品质的生活首先要保证居住环境的干净卫生,因此大家渴望找到一种机器人,能够智能的打扫房间卫生。 机器人作为人类20世纪最伟大的发明之一,在短短的几十年发生了日新月异的变化。近几年机器人已成为高技术领域具有代表性的战略目标。机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓无所不在。目前机器人已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经离不开机器人的帮助。机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动控制等为一体。目前对机器人的研究已经呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。 目前机器人行业的发展与30年前的电脑行业极为相似。今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦查机器人、以及通过编译程序使其能做整套表演动作的舞蹈机器人,还有不少参考人、狗、恐龙等动物的模样制造机器人玩具。 扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。扫地机器人也是当下比较流行的一种机器人,随着不断的研究发展智能化大幅度提高,能够自我定位、感应障碍物、规划路径以及自动充电。 2.扫地机器人的技术指标 综合考虑经济型和先进性的原则,参考淘宝网在售产品,我选择了一款扫地机器人以作对比,实物如图2.1所示。该产品采用革命性清扫系统,真空龙卷大吸力(普通机器人的5倍),无毛刷设计,首创滚筒吸取器,将适配器与座充合二为一(简约、美观而且不占空间),零部件高度模块化,可自由拆卸更换,垃圾盒、独立滤网仓方便抽取和清理。
机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。” 组成 机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。[1] 执行机构即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为 机器人高科技产物(19张) 关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。 驱动装置是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。 检测装置的作用是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。作为检测装置的传感器大致可以分为两类:一类是内部信息传感器,用于检测机器人各部分的内部状况,如各关节的位置、速度、加速度等,并将所测得的信息作为反馈信号送至控制器,形成闭环控制。另一类是外部信息传感器,用于获取有关机器人的作业对象及外界环境等方面的信息,以使机器人的动作能适应外界情况的变化,使之达到更高层次的自动化,甚至使机器人具有某种“感觉”,向智能化发展,例如视觉、声觉等外部传感器给出工作对象、工作环境的有关信息,利用这些信息构成一个大的反馈回路,从而将大大提高机器人的工作精度。 控制系统有两种方式。一种是集中式控制,即机器人的全部控制
摘要 倒立摆系统作为一个具有绝对不稳定、高阶次、多变量、强祸合 的典型的非线性系统,是检验新的控制理论和方法的理想模型,所以 本文选择倒立摆系统作为研究对象具有重要的理论意义和应用价值。 相对于其他研究倒立摆系统的控制方法,Backstepping方法最大的优点是不必对’系统进行线性化,可以直接对系统进行递推性的控制器设计,保留了被控对象中有用的非线性项,使得控制设计更接近实际情况,而且所设计的控制器具有很强的鲁棒性。 本文主要利用Backstepping方法设计了直线型一级倒立摆系统控制器并基于/ MATLAB Simulink对系统进行了离线仿真。本文所作的主要工作或要达到的主要目的是: (一)建立直线型一级倒立摆系统的数学模型,并利用Backstepping方法设计了该倒立摆系统的控制器,然后对闭环系统进行了数值仿真并与其他方法进行了数值仿真分析比较。与当前的倒立摆研究成果相比,具有研究方法新颖、控制效果好的特点。 (二)本文利用所设计的非线性控制器在/ MATLAB Simulink环境下对系统进行了离线仿真分析,并与固高公司提供的算法进行了仿真效果比较。 关键词:倒立摆系统,Backstepping, / MATLAB Simulink,实时控制
目录 1.倒立摆系统的简介 (1) 1.1倒立摆系统的研究背景 (1) 1.2倒立摆系统的研究历史、现状及发展趋势 (2) 1.3倒立摆的主要控制方法 (4) 2.一级倒立摆数学模型 (6) 2.1一级倒立摆系统的组成 (6) 2.2一级倒立摆系统数学模型的建立 (7) 3.系统控制器的设计和闭环系统的数值仿真 (9) 4.直线型一级倒立摆系统的Simulink模型和离线仿真 (12) 4.1基于线性控制器对线性系统的离线仿真 (12) 4.2基于线性控制器对非线性系统的离线仿真 (15) 4.3基于非线性控制器对非线性系统的离线仿真 (16) 5.模型的优点 (18) 6.结论和展望 (19) 7.参考文献 (20)
智能扫地机器人项目投资计划书 规划设计/投资分析/产业运营
报告说明— 该智能扫地机器人项目计划总投资7474.28万元,其中:固定资产投 资5228.65万元,占项目总投资的69.96%;流动资金2245.63万元,占项 目总投资的30.04%。 达产年营业收入16433.00万元,总成本费用12411.56万元,税金及 附加152.50万元,利润总额4021.44万元,利税总额4728.62万元,税后 净利润3016.08万元,达产年纳税总额1712.54万元;达产年投资利润率53.80%,投资利税率63.27%,投资回报率40.35%,全部投资回收期3.98年,提供就业职位323个。 扫地机器人从功能性向智能型转型,由基本的清扫功能,到清扫效率、清扫质量的提升,规划类产品已经成为行业的标配,客户体验明显提升。 围绕着传感器、算法方面的提升,规划类产品再度引爆了扫地机器人市场,使得扫地机器人市场进入智能新时代。
目录 第一章总论 第二章建设单位基本信息第三章项目建设必要性分析第四章建设内容 第五章项目建设地方案 第六章项目土建工程 第七章工艺方案说明 第八章项目环保分析 第九章安全管理 第十章建设风险评估分析 第十一章项目节能方案分析第十二章实施进度计划 第十三章投资计划方案 第十四章项目经营效益分析第十五章综合评价 第十六章项目招投标方案
第一章总论 一、项目提出的理由 扫地机器人从功能性向智能型转型,由基本的清扫功能,到清扫效率、清扫质量的提升,规划类产品已经成为行业的标配,客户体验明显提升。 围绕着传感器、算法方面的提升,规划类产品再度引爆了扫地机器人市场,使得扫地机器人市场进入智能新时代。 二、项目概况 (一)项目名称 智能扫地机器人项目 (二)项目选址 xx经开区 场址选择应提供足够的场地用以满足项目产品生产工艺流程及辅助生 产设施的建设需要;场址应具备良好的生产基础条件而且生产要素供应充裕,确保能源供应有可靠的保障。 (三)项目用地规模 项目总用地面积21484.07平方米(折合约32.21亩)。 (四)项目用地控制指标
慧鱼机器人 一、概述 1.1机电一体化技术 1.1.1机电一体化技术的定义和内容 机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。 1.1.2机电一体化系统组成 1.机械本体机械本体包括机架、机械连接、机械传动等,它是机电一体化的基础,起着 支撑系统中其他功能单元、传递运动和动力的作用。 2.检测传感部分检测传感部分包括各种传感器及其信号检测电路,其作用就是检测机电 一体化系统工作过程中本身和外界环境有关参量的变化,并将信息传递 给电子控制单元,电子控制单元根据检查到的信息向执行器发出相应的 控制。 3.电子控制单元电子控制单元是机电一体化系统的核心,负责将来自各传感器的检测信 号和外部输入命令进行集中、存储、计算、分析,根据信息处理结果, 按照一定的程度和节奏发出相应的指令,控制整个系统有目的地进行。 4.执行器执行器的作用是根据电子控制单元的指令驱动机械部件的运动。执行器是运动 部件,通常采用电力驱动、气压驱动和液压驱动等几种方式。 5.动力源动力源是机电一体化产品能量供应部分,是按照系统控制要求向机械系统提供 能量和动力使系统正常运行。提供能量的方式包括电能、气能和液压能。
年产xx台扫地机器人项目 商业计划书 规划设计/投资分析/实施方案
报告摘要说明 扫地机器人满足家庭清洁需求,相比人力和吸尘器,扫地机器人更加 智能便捷,其采用的环境感知技术和运动控制技术大大降低清扫过程的人 工干预,可自主完成规划路径、清扫、充电。 xxx科技公司由xxx科技发展公司(以下简称“A公司”)与xxx 有限公司(以下简称“B公司”)共同出资成立,其中:A公司出资350.0万元,占公司股份55%;B公司出资290.0万元,占公司股份45%。 xxx科技公司以扫地机器人产业为核心,依托A公司的渠道资源和 B公司的行业经验,xxx科技公司将快速形成行业竞争力,通过3-5年 的发展,成为区域内行业龙头,带动并促进全行业的发展。 xxx科技公司计划总投资19646.67万元,其中:固定资产投资15055.09万元,占总投资的76.63%;流动资金4591.58万元,占总投 资的23.37%。 根据规划,xxx科技公司正常经营年份可实现营业收入38833.00 万元,总成本费用30894.42万元,税金及附加360.15万元,利润总 额7938.58万元,利税总额9393.71万元,税后净利润5953.93万元,纳税总额3439.77万元,投资利润率40.41%,投资利税率47.81%,投 资回报率30.31%,全部投资回收期4.80年,提供就业职位734个。
目前,家务机器人在个人及家用服务机器人的销售量中占据主要部分,发展速度较快,而家务机器人的发展主要得益于智能扫地机器人市场的崛起。
第一章总论 一、拟筹建公司基本信息 (一)公司名称 xxx科技公司(待定,以工商登记信息为准) (二)注册资金 公司注册资金:640.0万元人民币。 (三)股权结构 xxx科技公司由xxx科技发展公司(以下简称“A公司”)与xxx 有限公司(以下简称“B公司”)共同出资成立,其中:A公司出资350.0万元,占公司股份55%;B公司出资290.0万元,占公司股份45%。 (四)法人代表 秦xx (五)注册地址 xxx高新技术产业示范基地(以工商登记信息为准) (六)主要经营范围 以扫地机器人行业为核心,及其配套产业。
目录 1绪论 (2) 1.1机器人的论述 (2) 1.2机器人的历史现状 (4) 1.3机器人的发展趋势 (5) 2搬运机器人的总体设计 (6) 2.1搬运机器人原理设计 (6) 2.2搬运机器人的机械系统设计 (6) 3手臂设计及计算 (9) 3.1搬运机器人臂部的驱动计算 (10) 3.2臂部上零件的选型及其校核 (13) 4结论 (15) 5参考文献 (16)
阶段,例如,美国通用汽车公司1968年订购了68台工业机器人;1969年该公司又自行研制出SAM新工业机器人,并用21组成电焊小汽车车身的焊接自动线;又如,美国克莱斯勒汽车公司32条冲压自动线上的448台冲床都用工业机器人传递工件。 (3)1970年至今一直处于推广应用和技术发展阶段。1970-1972年,工业机器人处于技术发展阶段。1970年4月美国在伊利斯工学院研究所召开了第一届全国工业机器人会议。据当时统计,美国大约200台工业机器人,工作时间共达60万小时以上,与此同时,出现了所谓了高级机器人,例如:森德斯兰德公司(Sundstrand)发明了用小型计算机控制50台机器人的系统。又如,万能自动公司制成了由25台机器人组成的汽车车轮生产自动线。麻省理工学院研制了具有有“手眼”系统的高识别能力微型机器人。 其他国家,如日本、苏联、西欧,大多是从1967,1968年开始以美国的“Versatran”和“Unimate”型机器人为蓝本开始进行研制的。就日本来说,1967年,日本丰田织机公司引进美国的“Versatran”,川崎重工公司引进“Unimate”,并获得迅速发展。通过引进技术、仿制、改造创新。很快研制出国产化机器人,技术水平很快赶上美国并超过其他国家。经过大约10年的实用化时期以后,从1980年开始进入广泛的普及时代。 我国虽然开始研制工业机器人仅比日本晚5-6年,但是由于种种原因,工业机器人技术的发展比较慢。目前我国已开始有计划地从国外引进工业机器人技术,通过引进、仿制、改造、创新,工业机器人将会获得快速的发展。 1.3机器人发展趋势 随着现代化生产技术的提高,机器人设计生产能力进一步得到加强,尤其当机器人的生产与柔性化制造系统和柔性制造单元相结合,从而改变目前机械制造的人工操作状态,提高了生产效率。 就目前来看,总的来说现代工业机器人有以下几个发展趋势: a)提高运动速度和运动精度,减少重量和占用空间,加速机器人功能部件的标准化和模块化,将机器人的各个机械模块、控制模块、检测模块组成结构不同的机器人; b)开发各种新型结构用于不同类型的场合,如开发微动机构用以保证精度;开发多关节多自由度的手臂和手指;开发各类行走机器人,以适应不同的场合; c)研制各类传感器及检测元器件,如,触觉、视觉、听觉、味觉、和测距传感器等,用传感器获得工作对象周围的外界环境信息、位置信息、状态信息以完成模式识别、状态检测。并采用专家系统进行问题求解、动作规划,同时,越来越多的系统采用微机进行控制。