目录
第1章搭建机器视觉处理平台 (1)
1.1 选择相机 (1)
1.1.1 扫描类型(Scan type) (1)
1.1.2 相机分辨率(Camera Resolution) (2)
1.1.3 相机的图像传输方式 (3)
1.2 选择图像采集板卡 (5)
1.3 选择软件处理平台 (6)
1.3.1 超高性价比的学习平台 (7)
第1章搭建机器视觉处理平台
1.1 选择相机
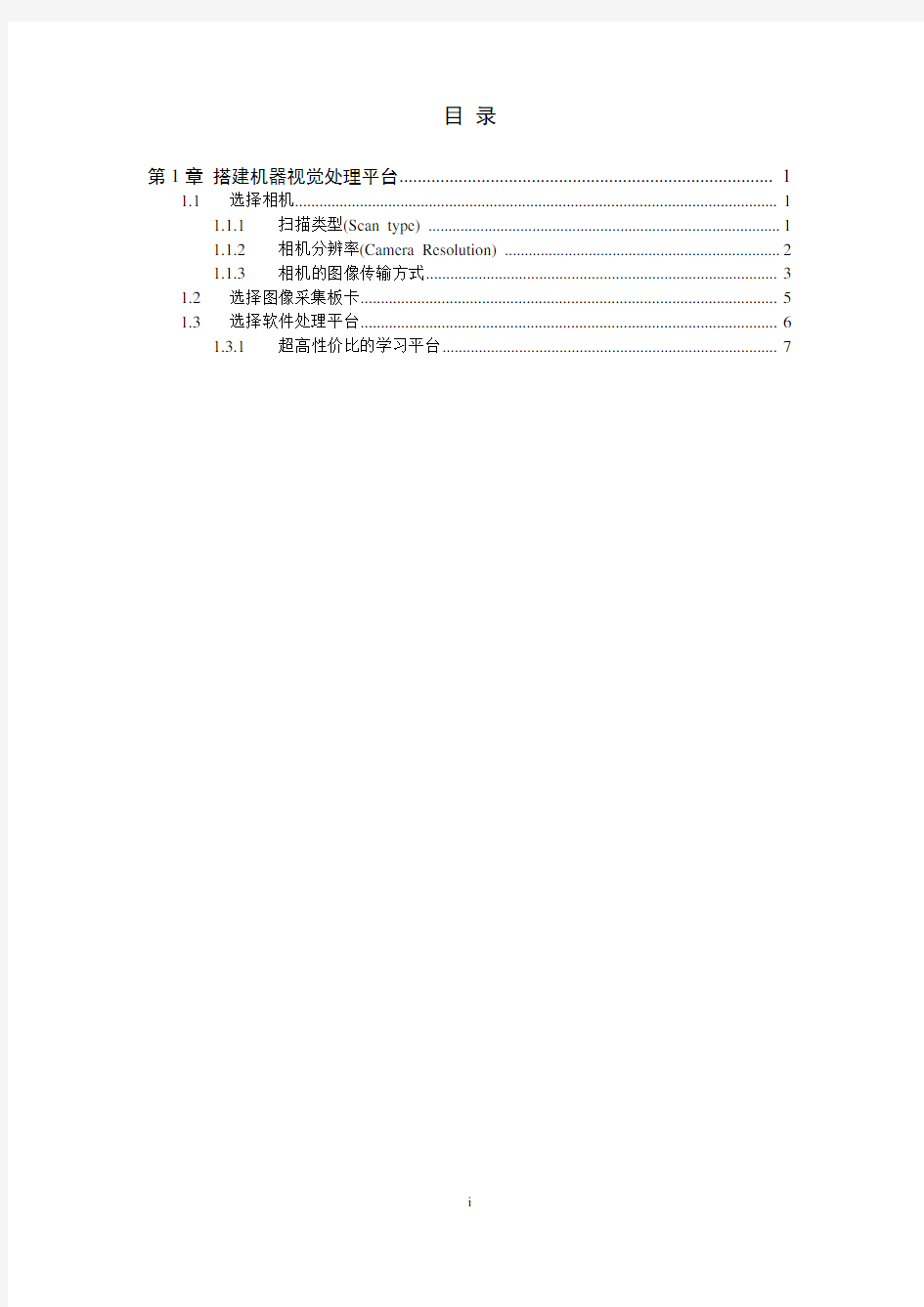
光源选择好了以后,下一步就是选择相机。通常,在工业相机的说明书上,会出现这样的指标,如图2.1所示。
图2.1 工业相机指标(来自https://www.doczj.com/doc/fd7133845.html,)
下面本文将详述工业相机常见的指标,以帮助大家选择合适的相机。
1.1.1扫描类型(Scan type)
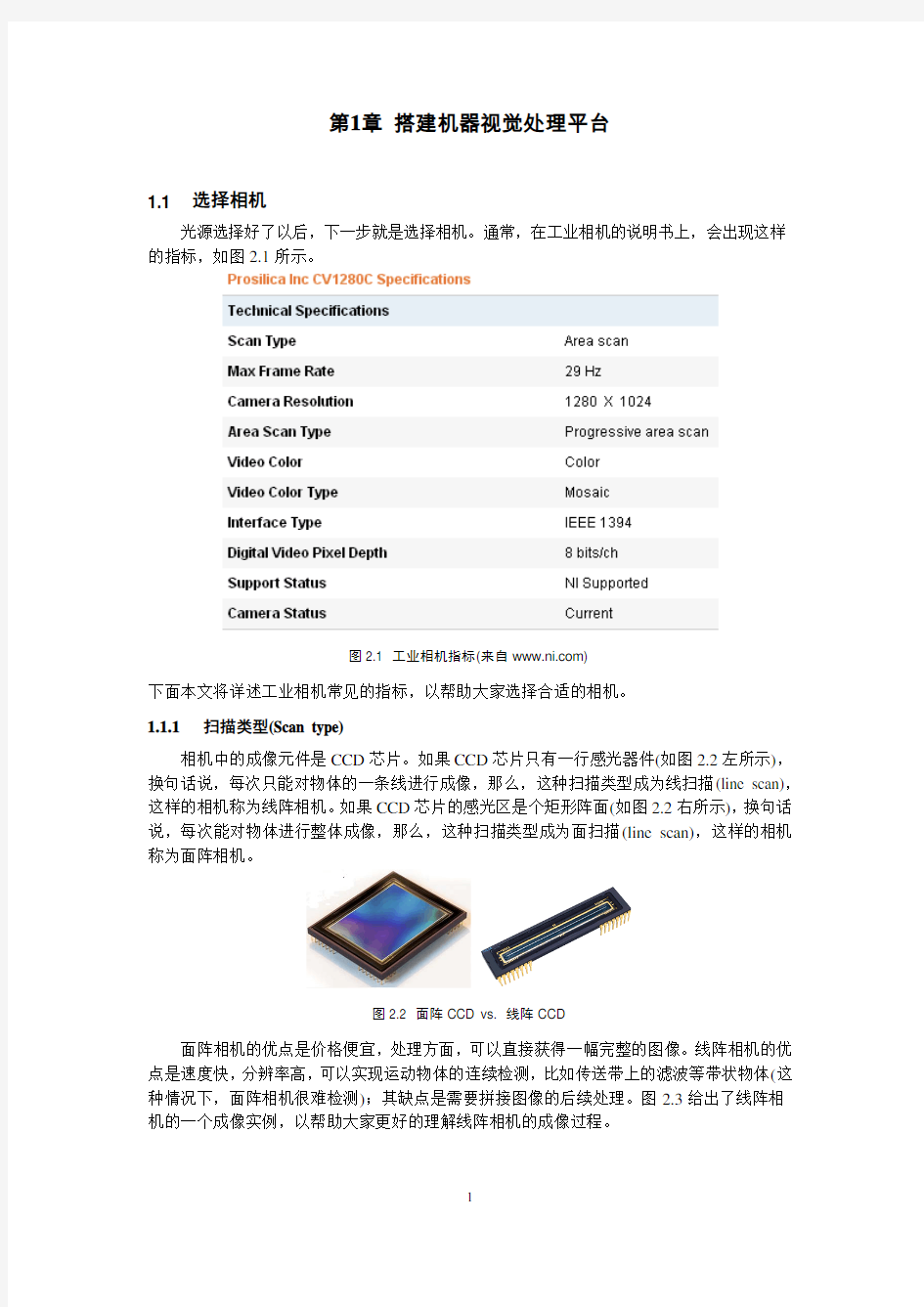
相机中的成像元件是CCD芯片。如果CCD芯片只有一行感光器件(如图2.2左所示),换句话说,每次只能对物体的一条线进行成像,那么,这种扫描类型成为线扫描(line scan),这样的相机称为线阵相机。如果CCD芯片的感光区是个矩形阵面(如图2.2右所示),换句话说,每次能对物体进行整体成像,那么,这种扫描类型成为面扫描(line scan),这样的相机称为面阵相机。
图2.2 面阵CCD vs. 线阵CCD
面阵相机的优点是价格便宜,处理方面,可以直接获得一幅完整的图像。线阵相机的优点是速度快,分辨率高,可以实现运动物体的连续检测,比如传送带上的滤波等带状物体(这种情况下,面阵相机很难检测);其缺点是需要拼接图像的后续处理。图2.3给出了线阵相机的一个成像实例,以帮助大家更好的理解线阵相机的成像过程。
图2.3 线阵相机成像实例
按照扫描方式不同,面阵相机还可以分为隔行扫描(Interlaced scan)和逐行扫描(Progressive Scan)。隔行扫描方式下一幅完整图像分两次显示,首先显示奇数场(1、3、5……),再显示偶数场(2、4、6……),如图2.4所示。
奇数场偶数场
+
帧
=
图2.4 隔行扫描成像过程
隔行扫描相机的优点是价格便宜,但由于隔行扫描方式是先扫奇数场,再扫偶数场,所以隔行扫描相机在拍运动物体的时候容易出现锯齿状边缘或叠影。
逐行扫描相机则没有上述的缺点,由于所有行同时曝光,不会分先后,所以在拍摄运动图像画面清晰,失真小。其余参数相似的情况下,逐行扫描相机要比隔行扫描相机贵。
1.1.2相机分辨率(Camera Resolution)
分辨率是影响图像效果的重要因素,我们一般用水平和垂直方向上所能显示的像素数来表示分辨率,例如640×480。该值越大图形文件所占用的磁盘空间也就越多,从而图像的细节表现得更充分。
与分辨率联系非常紧密的参数是视场(Field of View)和特征分辨率(Feature Resolution),如图2.5所示。视场是指能拍摄到的范围,特征分辨率是指能分辨的实际物理尺寸。
图2.5 视场和特征分辨率
NI Vision Module中的图像算法要求,物体最小的特征需要两个像素来表示,根据视场和相机分辨率,我们可以计算出特征分辨率。计算特征分辨率的公式为:
特征分辨率 = 视场/分辨率 * 2
例如:相机分辨率为640 x 480,横向的视场是60mm,那么在横向的特征分辨率为:60/640*2 = 0.1875 mm。
1.1.3相机的图像传输方式
按照不同的图像传输方式,相机可以大略的分为模拟相机和数字相机。
1.模拟相机
模拟相机以模拟电平的方式表达视频信号,如图2.6所示。模拟相机现在使用非常广泛,其优点是技术成熟、成本低廉、对应的图像采集卡价格也比较低。8-bit的图像采集卡可以提供256级的灰度,对于大部分的图像应用已经足够了。
图2.6 模拟视频信号
模拟相机有四个非常成熟的标准:PAL、NTSC、CCIR和RS-170,如表2.1所示。里面需要关注的参数有帧率、彩色/黑白、分辨率。
表2.1 模拟相机标准
标准 使用地 帧率 帧/秒 彩色/黑白分辨率
彩色 768×676 PAL 欧洲 25
NTSC 美国、日本 30 彩色 640×480
CCIR 欧洲 25
黑白 768×676 RS-170 美国、日本 30 黑白 640×480
由表2.1可以用看出,不同的标准对应不同的参数,这些参数必须正确告知图像采集卡,
才能获得准确的图像。在NI Measurement & Automation中,可以根据相机模拟图像的输出格式来配置图像采集卡,如图2.7所示。
图2.7 配置图像采集卡
模拟相机也有一些缺点,比如帧率不高,分辨率不高等等。在高速、高精度机器视觉应用中,一般都会考虑数字相机。
2.数字相机
数字相机先把图像信号数字化后通过数字接口传到电脑中。常见的数字相机接口有Firewire、CameraLink、GigE和USB。
Camera Link是一个工业高速串口数据连接标准,它是由National Instruments、摄像头供应商和其他图像采集公司在2000年10月联合推出的,它在一开始就对接线、数据格式、触发、相机控制等做了考虑,所以非常方便机器视觉应用。Camera Link的数据传输率可达1Gbits/s,可提供高速率、高分辨率和高数字化率,信噪比也大大改善。Camera Link的标准数据线长3米,最长可达10米。如果您是高速或高分辨率的应用,Camera Link肯定是首选。
Firewire即IEEE1394,开始是为数字相机和PC连接设计的,它的特点是速度快(400Mbits/s),通过总线供电和支持热插拔。另外值得一提的是,如果PC上自带Firewire接口,那么不需要为相机额外购买一块图像采集卡了,这在成本上也是一种优势。
GigE,即千兆以太网接口,它似乎综合了高速数据传输和远距离的特点,而且电缆便宜(网线)。缺点是支持这种接口的相机型号比较少,选择有限。
USB相机较多的用在娱乐上,比如USB摄像头,USB工业相机型号也比较少,在工业中的使用程度不高。但正是因为USB摄像头超级低廉(不到100元人民币),所以本文把USB摄像头作为机器视觉学习的硬件平台,这样可以方便大家以低廉的成本进入机器视觉
领域。
1.2 选择图像采集板卡
一般来说,选好相机后,图像处理板卡也就确定了。生产图像处理板卡的厂家非常多,如果您的应用除了单纯的图像处理外,还包括数据采集、运动控制等要求的话,选择National Instruments公司的图像处理板卡是一个不错的选择。因为所有功能都可以在一个统一的软件平台(LabVIEW)和硬件平台(PXI)上完成,方便系统集成。
在https://www.doczj.com/doc/fd7133845.html,/camera上提供一个相机选择助手,如图2.8所示。
图2.8 相机选择助手
在相机选择助手选择相应的参数,如供应商、扫描模式、接口类型、分辨率等,就可以查到到相应的应用比较成熟的相机,并且还可以比较同类型的相机。
点击到感兴趣的相机页面,不仅可以获得相机相关的信息,还可以得到图像采集卡的推荐,如图2.9所示。推荐的图像采集卡都是经过NI公司验证过的,所以可以把兼容性问题降到最低。
图2.9 相机信息页面
1.3 选择软件处理平台
机器视觉处理软件有很多种,比如源代码开放的OpenCV,Mathworks公司的图像处理工具包,Matrox公司的Imaging Library,National Instruments公司的LabVIEW等等。
如果目标是机器视觉算法研究,需要考虑软件的源代码是否开放。
如果目标是机器视觉系统的开发,需要考虑的因素有:图像处理函数库是否完备;发布费用是否高昂;使用是否方便;开发平台是否统一;与硬件结合是否容易;公司的售后服务及技术支持是否到位等等。
机器视觉系统开发带有很强的试验性质,通常需要多种处理算法混合在一起才能取得目标效果,需要一边尝试一边开发。如果图像处理函数库不够完备,那么开发起来,处理过程将受到很多限制。
商业的软件平台通常会收取发布费用,如果产品比较低端,那昂贵的发布费用将占去大部分利润。
对于系统开发来说,商品的上市时间是一个重要的因素,大量的时间花在源代码的调试上是一件得不偿失的事情,所以软件的易用程度和学习曲线将是一个重要的考虑因素。
机器视觉系统是一个涵盖机械、图像处理、数据采集和运动控制等的复杂系统,如果开发平台统一,容易集成诸如数据采集和运动控制等功能的话,那比较容易开发出功能更加复杂、附加值更加高的产品。笔者在学生期间曾经做过一套系统,在VC下进行图像采集与处理,用单片机系统实现数据采集,用PLC进行电机控制,然后用RS485进行通信。在这个工程项目中,必须学习VC,Keil C和GXDeveloper三种开发平台,且不说各模块功能的实现,单是设计和开发通讯协议,就在三个平台间辗转反侧,花了很多精力和时间。
另外,如果供应商的技术支持很好,比如有免费800电话,工程师现场支持等服务的话,会非常有助于项目的开发。笔者在项目开发时,遇到问题的主要解决途径就是Google和论坛。
本文将介绍National Instruments公司的LabVIEW开发平台,在这个平台不仅可以学习图像采集、图像处理及机器视觉,学完后还能将所学到的知识和技能直接用于机器视觉系统的开发。
1.3.1超高性价比的学习平台
前文中提到,USB 摄像头常用于家庭娱乐,但由于其价格低廉,非常适合做学习机器视觉的入门级硬件。本节将介绍LabVIEW平台下,如何利用USB 摄像头学习机器视觉的方法。
1.买一个支持DirectShow的USB摄像头,就是QQ聊天的那种,免驱的。我买的是剑桥
A36 Pro,不到100元 RMB。
2.安装LabVIEW7.1以上的版本,参加任何的NI研讨会都可以拿到LabVIEW的试用光
盘,也可以到https://www.doczj.com/doc/fd7133845.html,/labview/下载
3.安装NI Vision Development Module,参加NI 机器视觉研讨会就可以拿到Vision
Development Module的试用光盘,或者到网上去下载,需要注意的是Vision Development Module的版本号要和LabVIEW对应,比如LabVIEW使用的是8.2,那么Vision Development Module也要使用8.2。
4.到https://www.doczj.com/doc/fd7133845.html,/devzone/cda/epd/p/id/5030去下载NI-IMAQ for USB Cameras,这是
在LabVIEW下,支持DirectShow的USB Camera的驱动并安装。
5.如果您用的是中文WinXP SP2操作系统,还需要到
https://www.doczj.com/doc/fd7133845.html,/ni/board/message?board.id=170&thread.id=154541&view=by_threadin g&page=5去下载一个dll文件(ImaqDirectShowDll),并用该文件覆盖system32文件夹下的同名文件。
上述系统的总花费就是一个可以用于QQ聊天的USB摄像头。
当系统配置好后,可以到C:\Program Files\National Instruments\LabVIEW 8.5\examples\IMAQ文件夹下,双击imaqUSB examples.llb文件,打开Grab.vi,然后运行。如果运行成功,则可以获得图像,如图2.10所示。
如果不成功,可以到https://www.doczj.com/doc/fd7133845.html,/bbs/的机器视觉测试版把问题帖出来,版上有很多热心的工程师,会帮您解决问题。
图2.10 USB Camera Grab.vi
目录
第1章搭建机器视觉处理平台 (1)
1.1 选择光源 (1)
1.1.1 常见的光源类型 (1)
1.1.2 照明效果的优化 (5)
1.1.3 光源评估服务 (7)
第1章搭建机器视觉处理平台
通常,典型的机器视觉系统由以下四个部分——光源、相机、图像采集卡和图像处理软件组成,如图1.1所示。
图1.1 典型的机器视觉系统
作为机器视觉系统开发工程师,我们必须根据实际需要选择好光源,相机,图像采集卡和图像处理软件。下面本文将依次介绍如何选择光源,相机,图像采集卡和图像处理软件,并介绍一种对初学者来说性价比非常高的学习方案。
1.1 选择光源
刚接触机器视觉系统时可能无法意识到光源选择恰当与否直接关系到系统的成败。例如,把10斤红豆(待观察的对象特征)、10斤绿豆(不需要关注的物体)和10斤沙子(噪声)混合在一起让你在三分钟内把10斤红豆筛选出来和把10斤红豆、1斤绿豆、1斤沙子混合在一起让你在三分钟内把10斤红豆筛选出来,谁更容易些?显然干扰少(绿豆),噪声低(沙子)的工作才能干的又快又好!
选择光源的目标就是:1、增强待处理的物体特征;
2、减弱不需要关注的物体和噪声的干扰;
3、不会引入额外的干扰。
以获取高品质、高对比度的图像。
按照明方式的不同,光源可以分为:直接照明光源、散射照明光源、背光照明光源、同轴照明光源和特殊照明光源。下面,本文将依次介绍各种不同的光源。
1.1.1常见的光源类型
1.直接照明光源
直接照明光源就是光源直接照射到被检测物体上,它的特点是照射局域集中、亮度高和安装方便,可以得到清楚的影像。常见的直接照明方式有沐光方式、低角度方式、条形方式和聚光方式。
沐光方式
沐光方式常用的是LED环形光源,如图2.1所示。高密度的LED阵列排列在伞状结构中,可以在照明区域产生集中的强光。
图2.1的右方部分是LED环形光源的安装部分,其中被检测的物体应该在图中的Work 区域。
图2.1 LED环形光源, 沐光方式(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
该种照明方式的优点是亮度大、灵活、容易适应包装要求;缺点是:阴影和反光;常见的应用是:检测平面和有纹理的表面。其照明效果如图2.2所示,左边是实物图,右边是照明效果图,可以看到,在沐光方式下,芯片表面的字迹显示的非常清晰。
图2.2 沐光方式照明效果(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
低角度方式
低角度方式常用的也是LED环形光源,如图2.3所示。与沐光方式用的环形光源不同的是,它更大,安装的角度更低,接近180度。
图2.3 低角度方式(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
低角度方式下,光源以接近180度角照明物体,容易突出被检测物理的边缘和高度变化。该种照明方式的优点是凸显表面结构,增强图像的拓扑结构;缺点是:热点和极度阴影;常见的应用是:检测平面和有纹理的表面。其照明效果如图2.4所示,左边是实物图,右边是照明效果图可以看到,在低角度方式下,硬币的边缘及字迹的边缘显示的非常清晰。
图2.4 低角度方式照明效果(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
条形方式
条形方式常用的是LED条形光源,如图2.5所示。条形方式除具备沐光方式的优点外,其安装角度还可以按照需要进行调节。通过调节光线的角度和方向,可以检测到被测物体表面是否有光泽,是否有纹路,也可以检测到表面特征。
图2.5条形方式(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
聚光方式
聚光方式主要是在条形光源上加入一个柱型透镜,把光线汇聚成一条直线,以产生高亮度线光源,如图2.6所示。线性聚光方式常常配合线阵相机获得高质量的图像。
图2.6聚光方式(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
2.散射照明光源
对于表面平整光洁的高反射物体,直接照明方式容易产生强反光。散射照明先把光投射到粗糙的遮盖物上(比如漫射板),产生无方向、柔和的光,然后再投射到被检测物体上,如图2.7所示。这种光最适合高反射物体。
图2.7 散射圆顶照明
低角度方式
与前述直接照明的低角度方式不同,散射方式的光源先经过内壁散射之后再均匀的照射到物体上,在提供均匀照明的同时,有效的消除了边缘的反射,如所示。
图2.8 散射照明中的低角度方式(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
上述的照明方式常用于BGA焊点检测,芯片管教检测等应用,图2.9是BGA焊点的成像实例,在图中可见,在低角度散射照明下,BGA的焊点清晰且没有反光。
图2.9 BGA焊点的成像实例(引自https://www.doczj.com/doc/fd7133845.html,s-inc.co.jp)
扁平环状方式
扁平环状方式是在光源前面加了一块漫反射板,光源经过反射后再经过漫反射板,可以形成均匀漫射的顶光,避免了眩目光和阴影,如图2.10所示。
图2.10 扁平环状方式
圆顶方式
圆顶方式如图2.11所示,最适合表面有起伏、光泽的被测物体的文字检查。
图2.11 圆顶方式
3.背光照明光源
背光照明方式下,光源均匀的从被检测物体的背面,可以获得高清晰的轮廓,常用于物体外形检测、尺寸检测等等,如图2.12所示。
图2.12 背光照明方式及其成像实例
4.同轴照明光源
LED的高强度均匀光线通过半镜面后成为与镜头同轴的光,如所示。具有特殊涂层的半镜面可以抑制反光和消除图像中的重影,特别适合检测镜面物体上的划痕。
图2.13 同轴照明光源
5.特殊照明光源
特殊照明光源包括平行光光学单元、显微镜专用照明系统和按照客户要求定制的光源等等。
1.1.2照明效果的优化
当选择好一款光源类型后,还可以利用很多技术来最优化检测结果。
1.颜色
对于不发光体来说又可分为透明体和不透明体两种,大部分是不透明体。不透明体都具有反射或吸收不同波长的色光的能力,被吸收掉的色光我们是看不见的。只有反射回来的色光才直接作用于我们的眼睛,所以我们看到的不透明体的颜色是反射光的颜色,这就是“反射色”。如果用红光照射红色的物体,能得到最高的亮度;若用红色光照射绿色物体,可以得到最低的亮度,或者说图像几乎是黑色的,因为绿色物体基本不反射红色光。在图 2.14所示彩色轮展示了色彩之间的对应情况。用一种颜色照射它相对的颜色,基本是黑色;照射其它颜色,物体亮度依次增加;照射同样的颜色,可以得到最大的亮度。
图2.14 彩色轮
所以,适当的选择光源颜色,可以增强图像的对比度。图2.15展示了BGA焊点分别在红色光和蓝色光下的成像实例;在红色光下,芯片中央的条纹依然清晰可见(图中),这为引脚检测引入了一些干扰;在蓝色光下,芯片中央的条纹基本看不见了,仅留下BGA焊点的影像,便于后续检测。
图2.15 BGA引脚分别在红色光和蓝色光下的成像实例
2.滤光镜
消除不必要的数据和噪声可以加快有用信息的处理速度。滤光镜是一个简单的限制进入相机光线的技术。常见的滤光镜有偏光镜、波通镜和阻隔镜。它们的作用类似滤波器,滤掉符合一定条件的信号。
图2.16展示了偏光镜消除眩光的一个成像实例。在相机镜头前添加偏光镜,旋转偏光镜到眩光最小的地方;如果眩光还影响检测,则可以再加一个偏光镜知道图像清晰为止。
图2.16 偏光镜消除眩光的成像实例
1.1.3光源评估服务
在选择光源的时候,如果感觉拿不准,可以把样品提供给光源提供商,光源提供商会在光源实验室里面为大家选择合适的光源。
目录
第3章图像采集 (1)
3.1采集单幅图像 (1)
3.1.1基于图像采集卡的Snap操作 (1)
3.1.2基于USB摄像头的Snap操作 (3)
3.1.3使用Snap.vi进行连续图像采集的速度问题 (4)
3.2采集连续图像 (5)
3.2.1基于图像采集卡的Grab操作 (6)
3.2.2基于USB摄像头的Grab操作 (7)
3.3多缓冲区采集方式 (8)
3.3.1Sequence图象采集方式 (9)
3.3.2Ring图象采集方式 (10)
3.4触发 (11)
3.4.1触发信号类型 (11)
3.4.2触发方式图象采集的实现 (12)
3.5图像保存与读取 (14)
3.5.1图像文件格式简介 (14)
3.5.2保存图像 (15)
3.5.3读取图像 (16)
第3章图像采集
当选定好机器视觉的软硬件平台后,下一步就是图像采集。本章将详细讨论基于USB 摄像头的图像采集和工业相机的图像采集,大家可以根据手中硬件的不同而选读不同的部分。从软件的视角来看,尽管硬件不同,但编程的思路和模式是基本一致的。
本文使用的工业相机是Panasonic的BP330,它是一款遵循CCIR标准的黑白相机,图像采集卡是NI公司的PCI-1407(任何标准制式的黑白模拟相机都可以接到PCI-1407)。把相机连接到PCI-1407后,即可在MAX下找到PCI-1407,点击Grab 按钮,还可以采集到图像,如图3.1所示。
图3.1 在MAX里面采集图像
如果你使用的是USB 摄像头,那么请参考Error! Reference source not found.Error! Reference source not found.,运行imaqUSB examples.llb中的Grab.vi。在软硬件正常工作的情况下,可以看到从USB 摄像头中传出的图像,如Error! Reference source not found.所示。
在进行机器视觉系统开发前,我们通常都会如上所示先验证软硬件是否能正常工作,以便后续开发。
3.1 采集单幅图像
3.1.1基于图像采集卡的Snap操作
采集单幅图像是基本的图像采集操作之一,对应的动作叫Snap。每次Snap时,图像数据先从相机传到图像采集卡,然后再传到计算机的内存(图像处理缓冲区)中去,如图3.2所示。
图3.2 Snap方式采集图像过程
Snap方式的图像采集程序如图3.3所示:
第1步:调用IMAQ Init.vi完成图像采集板卡的初始化工作。
第2步:调用IMAQ Create.vi为图像数据创建一个数据缓冲区。
第3步:调用IMAQ Snap.vi从图像采集板卡中读入一帧图像数据,并把它放入先前创建的数据缓冲区中,并放入Image中显示。
第4步:当图像数据缓冲区被释放后,我们在前面板上将看不到采集的图像了,所以特地添加一个人为的延时程序,等待用户停止。
第5步:调用IMAQ Close.vi,释放占有的图像采集板卡。
第6步:调用IMAQ Dispose.vi,释放占有的图像数据缓冲区。
图3.3 Snap范例程序
单幅图像采集的运行结果,如图3.4所示。
图3.4 单幅图像采集
基于机器视觉的工业机器人定位系统 基于机器视觉的工业机器人定位系统 类别:传感与控制 摘要:建立了一个主动机器视觉定位系统,用于工业机器人对零件工位的精确定位。采用基于区域的匹配和形状特征识别相结合的图像处理方法,该方法经过阈值和形状判据,识别出物体特征。经实验验证,该方法能够快速准确地得到物体的边界和质心,进行数据识别和计算,再结合机器人运动学原理控制机器人实时运动以消除此误差,满足工业机器人自定位的要求。 1.引言目前工业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对工业机器人的运动轨迹进行示教或离线编程,可节约大量的编程时间,提高生产效率和加工质量。Hagger 等人提出通过基于机器人末端与目标物体之间的误差进行视觉反馈的方法;Mezouar 等人提出通过图像空间的路径规划和基于图像的控制方法。国内这方面主要应用于焊接机器人对焊缝的跟踪。本文利用基于位置的视觉伺服思想,以六自由度垂直关节型喷涂机器人为载体,提出一种基于机器视觉的工业机器人自定位控制方法,解决了机器人末端实际位置与期望位置相距较远的问题,改善了喷涂机器人的定位精度。 2.视觉定位系统的组成机器人视觉定位系统构成如图 1 所示,在关节型机器人末端安装喷涂工具、单个摄像机,使工件能完全出现在摄像机的图像中。系统包括摄像机系统和控制系统:(1)摄像机系统:由单个摄像机和计算机(包括图像采集卡)组成,负责视觉图像的采集和机器视觉算法;(2)控制系统:由计算机和控制箱组成,用来控制机器人末端的实际位置;经 CCD 摄像机对工作区进行拍摄,计算机通过本文使用的图像识别方法,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置误差值,最后控制高精度的末端执行机构,调整机器人的位姿。 图1 喷涂机器人视觉定位系统组成 3.视觉定位系统工作原理 3.1 视觉定位系统的工作原理使用 CCD 摄像机和1394 系列采集卡,将视频信号输入计算机,并对其快速处理。首先选取被跟踪物体的局部图像,该步骤相当于离线学习的过程,在图像中建立坐标系以及训练系统寻找跟踪物。学习结束后,图像卡不停地采集图像,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置给定值,最后控制高精度的末端执行机构,调整机器人的位姿。工作流程如图2 所示。图 2 视觉定位系统软件流程图 3.2 基于区域的匹配本文采用的就是基于区域的相关匹配方法。它是把一幅图像中的某一点的灰度领域作为模板,在另一幅图像中搜索具有相同(或相似)灰度值分布的对应点领域,从而实现两幅图像的匹配。在基于区域相关的算法中,要匹配的元素是固定尺寸的图像窗口,相似准则是两幅图像中窗口间的相关性度量。当搜索区域中的元素使相似性准则最大化时,则认为元素是匹配的。定义P (i, j) P 是模板图像中一点,取以P (i, j) P 为中心的某一邻域作为相关窗口K ,大小为(2w +1),假设K 在原始图中,水
数据库应用基础教程答案 【篇一:access数据库应用基础教程(第三版)习题及答 案】 txt>程(第三版)习题集答案 第1章数据库系统概述 1. 什么是数据库?什么是数据库系统?答:数据库(database) 是存放数据的仓库,严格的讲,数据库是长期存储在计算机内,有组 织的,可共享的大量数据集合。 数据库系统(database systems),是由数据库及其管理软件组成的系统。它是为适应数据处理的需要而发展起来的一种较为理想的 数据处理的核心机构。它是一个实际可运行的存储、维护和应用系 统提供数据的软件系统,是存储介质、处理对象和管理系统的集合体。 2. 什么是数据库管理系统?它有哪些主要功能? 答:数据库管理系统(database management system)是一种操纵 和管理数据 库的大型软件,用于建立、使用和维护数据库,简称dbms。它对数据库进行统一的管理和控制,以保证数据库的安全性和完整性。 数据库管理系统的主要功能有:数据定义、数据操作、数据库的运 行管理、数据组织、数据库的保护、数据库的维护和通信。 3. 说出几种常用的数据模型。 答:层次模型、网状模型、关系模型。 4. 什么是关系模型? 答:关系模型是用二维表的形式表示实体和实体间联系的数据模型。 5. 简述数据库设计的步骤。 答:需求分析、概念结构设计、逻辑结构设计、物理结构设计、数 据库的建立和测试、数据库运行和维护。 第2章 sql 语言简介 1. 什么是sql语言?sql语言具有哪些特点和功能? 答:sql是一种数据库查询和程序设计语言,用于存取数据以及查询更新和管理关系 数据库系统。 sql的特点和功能有:查询,操作,定义和控制四个方面,sql语言 具有高度的非过程化,语言简洁,语义明显,语法结构简单,直观
图像处理及识别技术在机器人路径规划中的一种应用 摘要:目前,随着计算机和通讯技术的发展,在智能机器人系统中,环境感知与定位、路径规划和运动控制等功能模块趋向于分布式的解决方案。机器人路径规划问题是智能机器人研究中的重要组成部分,路径规划系统可以分为环境信息的感知与识别、路径规划以及机器人的运动控制三部分,这三部分可以并行执行,提高机器人路径规划系统的稳定性和实时性。在感知环节,视觉处理是关键。本文主要对机器人的路径规划研究基于图像识别技术,研究了图像处理及识别技术在路径规划中是如何应用的,机器人将采集到的环境地图信息发送给计算机终端,计算机对图像进行分析处理与识别,将结果反馈给机器人,并给机器人发送任务信息,机器人根据接收到的信息做出相应的操作。 关键词:图像识别;图像处理;机器人;路径规划 ABSTRACT:At present, with the development of computer and communication technology, each module, such as environment sensing, direction deciding, route planning and movement controlling moduel in the system of intelligent robot, is resolved respectively. Robot path planning is an part of intelligent robot study. The path planning system can be divided into three parts: environmental information perception and recognition, path planning and motion controlling. The three parts can be executed in parallel to improve the stability of the robot path planning system. As for environment sensing, vision Proeessing is key faetor. The robot path planning of this paper is based on image recognition technology. The image processing and recognition technology is studied in the path planning is how to apply, Robots will sent collected environment map information to the computer terminal, then computer analysis and recognize those image information. After that computer will feedback the result to the robot and send the task information. The robot will act according to the received information. Keywords: image recognition,image processing, robot,path planning
数据库应用系统开发 数据库系统开发案例—图书现场采购系统系统主窗体的实现 1.数据表结构的实现 经过前面的需求分析和概念结构设计以后,得到了数据库的逻辑结构。现在就可以在SQL Server 2000数据库系统中实现该逻辑结构。可以直接在SQL Server 2000企业管理器中创建表,也可以在SQL查询分析器中创建。下面给出在查询分析器中创建这些表的SQL语句,读者可以将这些表创建在系统的pubs数据库中。 (1)创建书商图书基本信息表bookseller_bookinfo CREATE TABLE bookseller_bookinfo( rec_id Bigint identity(1,1) PRIMARY KEY, isbn varchar(20) null, bookname varchar(200) null, author varchar(50) null, publisher_date varchar(50) null, publisher varchar(50) null, class_name varchar(50) null, book_price numeric DEFAULT 0, book_num int DEFAULT 0, provider varchar(50) null ) (2)创建图书馆图书馆藏基本信息表library_bookinfo CREATE TABLE library_bookinfo ( rec_id Bigint identity(1,1) PRIMARY KEY, isbn varchar(20) null, bookname varchar(200) null, author varchar(50) null, publisher_date varchar(50) null, publisher varchar(50) null, class_name varchar(50) null, book_price numeric DEFAULT 0, book_num int DEFAULT 0, provider varchar(50) null ) (3)创建用户注册表user_info CREATE TABLE user_info ( user_ID varchar(10) PRIMARY KEY , user_PWD varchar(10) null )
Access数据库应用基础教程(第三版)习题集答案 第1章数据库系统概述 1. 什么是数据库?什么是数据库系统?答:数据库(database)是存放数据的仓库,严格的讲,数据库是长期存储在计算机内,有组织的,可共享的大量数据集合。 数据库系统(database systems),是由数据库及其管理软件组成的系统。它是为适应数据处理的需要而发展起来的一种较为理想的数据处理的核心机构。它是一个实际可运行的存储、维护和应用系统提供数据的软件系统,是存储介质、处理对象和管理系统的集合体。 2. 什么是数据库管理系统?它有哪些主要功能? 答:数据库管理系统(database management system)是一种操纵和管理数据
库的大型软件,用于建立、使用和维护数据库,简称dbms。它对数据库进行统一的管理和控制,以保证数据库的安全性和完整性。数据库管理系统的主要功能有:数据定义、数据操作、数据库的运行管理、数据组织、数据库的保护、数据库的维护和通信。 3. 说出几种常用的数据模型。 答:层次模型、网状模型、关系模型。4. 什么是关系模型? 答:关系模型是用二维表的形式表示实体和实体间联系的数据模型。 5. 简述数据库设计的步骤。 答:需求分析、概念结构设计、逻辑结构设计、物理结构设计、数据库的建立和测试、数据库运行和维护。 第2章 SQL 语言简介 1. 什么是SQL语言?SQL语言具有哪些特点和功能? 答:SQL是一种数据库查询和程序设计语言,用于存取数据以及查询更新和管理关系
数据库系统。 SQL的特点和功能有:查询,操作,定义和控制四个方面,SQL语言具有高度的非过程化,语言简洁,语义明显,语法结构简单,直观易懂的特点。SQL语言即可以作为独立语言使用,用户可以在终端键盘上直接键入SQL命令对数据库进行操作,也可以作为嵌入式语言,嵌入到其他高级语言中。 2. SQL语言包含哪几个部分? 答:SQL语言包含4个部分:数据定义语言(DDL-Data Definition Language)、数据查询语言(DQL-Data Query Language)、数据操纵语言(DML-Data Manipulation Language)、数据控制语言(DCL-Data Control Language) 3. 在联接查询中,包含哪几类联接?答:联接可分为3类: (1)内部联接(典型的联接运算,使用类似于 = 或 <> 的比较运算符)。内部联接使用比较运算符根据每个表的通用列中的值匹配两个表中的行。内部联接包括同等
. ;.. 经过机器视觉技术及应用这门课程的学习,我觉得受益匪浅。可以说这门课 程更偏重于实践,也很好的锻炼了我们,老师讲课很认真,ppT准备的很详细,对于一些关键问题的讲解更是深入浅出。机器视觉技术,即采用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品即图像摄取装置,分CMOS 和CCD两种把图像抓取到,然后将该图像传送至处理单元,通过数字化处理,根据像素分布和亮度、颜色等信息,来进行尺寸、形状、颜色等的判别,进而根据判别的结果来控制现场的设备动作。机器视觉主要用计算机来模拟人的视觉功能,但并不仅仅是人眼的简单延伸,更重要的是具有人脑的一部分功能一一从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。 机器视觉不同于计算机视觉,它涉及图像处理、人工智能和模式识别,机器视觉是将计算机视觉应用于工业自动化。 目前在机器视觉系统中;CCD 摄像机以其体积小巧、性能可靠、清晰度高等优点得到了广泛使用。机器视觉伴随计算机技术、现场总线技术的发展,技术日臻成熟,已是现代加工制造业不可或缺的产品,广泛应用于食品和饮料、化妆品、制药、建材和化工、金属加工、电子制造、包装、汽车制造等行业。在未来的几年内,随着中国加工制造业的发展,对于机器视觉的需求也逐渐增多;随着机器视觉产品的增多,技术的提高,国内机器视觉的应用状况将由初期的低端转向高端。加之机器视觉的介入,自动化将朝着更智能、更快速的方向发展。 通过本课程的学习,我们掌握了一些机器视觉方面的基本知识。这门课对于我们生活方面有很大的实用性,可以让我们了解到机器视觉的基本构造,对成为技术应用型人才,适应社会和培养实践能力与技能都起到了很大的作用。这样的学习让我们将知识更灵活的运用,更好的将知识和实践结合在一起并转化为技能。 通过这门课程的学习,我们懂得更多,收获更多,提升了自身操作能力的同时又学到了很多东西,我相信在以后的课堂学习和实践学习中可以掌握更多更深入的知识,不断的提高自身的学习与应用能力。
C#.NET 下三层架构数据库应用系统的开发 摘要:基于 C#.NET 下的三层架构数据库系统在目前的大型 Web 数据库体系中非常常见,这主要是因为它的开发模式相当快速便捷,且具有较高的可重复性和可维护性事物处理机制。本文结合实践应用论述了关于 C#.NET 三层架构数据库的应用标准流程,并给出了由数据库变化所导致的三层架构程序变化修改策略,以避免传统数据库应用系统中所存在的编译错误。 关键词:C#.NET;数据库应用系统;三层架构;访问层;表现层;逻辑层 C#作为一种计算机语言,它不仅仅局限于对.NET 应用程序的开发,它也能够基于 WinForm 程序展开设计开发流程,所以将C#编程语言移植到.NET平台中是较为常见的。在该语言的支持下,https://www.doczj.com/doc/fd7133845.html,平台就应运而生。目前的https://www.doczj.com/doc/fd7133845.html,平台可以支持例如企业 ERP、APS 等系统,其应用范围遍布于气象、交通、救护等领域,发挥着巨大的社会价值作用。但是随着数据库应用系统规模的越来越大,数据库内结构的越来越复杂,代码的出错率就越来越高,这就加大了维
护工作的难度。基于 C#.NET 语言环境下的三层架构 数据库应用系统就可以以它模块化的分层设计模型解决现有系统所存在的维护性及系统可用性问题,将复杂的问题简单化,促进系统功能体系的整体发挥。 一、对三层体系结构的分析 (一)三层体系结构的基本概况 三层体系结构就是在客户端与数据库间所加入的中间层,它也被称为是组件层。三层体系结构不是指代物理结构中的三层,而是基于逻辑思维的三层,它们共同作用于同一台设备上。 从应用功能角度来分析,三层体系结构中应用程序的数据访问、校验以及业务规则等等都放在了中间层实施处理。而通常情况下,三层体系结构是不提供客户端与数据库之间的交互的,它主要基于 COM/DCOM 通讯手段来和中间层衔接建立联系,并经由中间层与数据库实施交互作业。 (二)三层体系结构的交互具体操作流程三层体系结构的交互具体操作流程主要基于三点。第一点是数据访问层与数据库之间的交互,当访问层在数据库获取数据并将其传递到业务逻辑层后,业务的实际应用需要就会被满足。再者,业务逻辑层的数据操作指令也会实时传递至数据库,实现对数据 的接收、存储、处理和删除等基本操作。
机器视觉技术应用--视觉定位系统 (编辑:李军单位:无锡创视新科技有限公司) 当前,工业产品种类繁多,在工业产品的生产过程中,都可能涉及到自动定位。如自动化生产线中要求对各零件快速、准确的安装到位。但目前还有部分加工厂还都采用传统的人工定位方法,此方法存在以下缺点: (1)长时间定位单一产品,检测工人眼睛容易疲劳,并且容易受情绪的影响,定位结果难以保证; (2)每个工人对同种被定位准确性的判断标准有轻微的浮动,定位标准不一致,因此很难保证高质量的产品; (3)人工定位的速度相对很慢,定位准确一个产品就需要很长时间,人工定位无法满足高速生产线的在线定位需求。 随着科技的发展,市场及用户对产品的精密程度和质量的要求越来越高,传统的定位方法已经不能满足用户的需求,因此,行业便相继引进机器视觉技术。 机器视觉就是用机器代替人眼来做测量和判断,通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉技术具备定位功能,能够自动判断物体的位置,并将位置信息通过一定的通讯协议输出。此功能多用于全自动装配和生产,譬如自动组装、自动焊接、自动包装、自动灌装、自动喷涂,多配合自动执行机构(机械手、焊枪、喷嘴等)。 基于机器视觉的视觉定位技术得到了广大加工厂商的普遍关注,全自动视觉定位方法不但克服了传统人工定位方法的缺点,同时也发挥了自己快速准确的优点:(1)定位精度高,定位结果可靠、稳定; (2)定位速度快,并且可以长时间工作,可以达到24小时全天运行。 在视觉定位检测系统中,能够准确识别产品的方向和位置是系统的核心。定位检测可分为两个步骤,一是制作标准模板,二是搜索。视觉定位系统采用先进的图像视觉检测技术,实现对高速运动的工业产品进行实时全面的视觉定位分析。当系统配备一台高性能彩
目录 第3章图像采集 (1) 3.1采集单幅图像 (1) 3.1.1基于图像采集卡的Snap操作 (1) 3.1.2基于USB摄像头的Snap操作 (3) 3.1.3使用Snap.vi进行连续图像采集的速度问题 (4) 3.2采集连续图像 (5) 3.2.1基于图像采集卡的Grab操作 (6) 3.2.2基于USB摄像头的Grab操作 (7) 3.3多缓冲区采集方式 (8) 3.3.1Sequence图象采集方式 (9) 3.3.2Ring图象采集方式 (10) 3.4触发 (11) 3.4.1触发信号类型 (11) 3.4.2触发方式图象采集的实现 (12) 3.5图像保存与读取 (14) 3.5.1图像文件格式简介 (14) 3.5.2保存图像 (15) 3.5.3读取图像 (16)
第3章图像采集 当选定好机器视觉的软硬件平台后,下一步就是图像采集。本章将详细讨论基于USB 摄像头的图像采集和工业相机的图像采集,大家可以根据手中硬件的不同而选读不同的部分。从软件的视角来看,尽管硬件不同,但编程的思路和模式是基本一致的。 本文使用的工业相机是Panasonic的BP330,它是一款遵循CCIR标准的黑白相机,图像采集卡是NI公司的PCI-1407(任何标准制式的黑白模拟相机都可以接到PCI-1407)。把相机连接到PCI-1407后,即可在MAX下找到PCI-1407,点击Grab 按钮,还可以采集到图像,如图3.1所示。 图3.1 在MAX里面采集图像 如果你使用的是USB 摄像头,那么请参考Error! Reference source not found.Error! Reference source not found.,运行imaqUSB examples.llb中的Grab.vi。在软硬件正常工作的情况下,可以看到从USB 摄像头中传出的图像,如Error! Reference source not found.所示。 在进行机器视觉系统开发前,我们通常都会如上所示先验证软硬件是否能正常工作,以便后续开发。 3.1 采集单幅图像 3.1.1基于图像采集卡的Snap操作 采集单幅图像是基本的图像采集操作之一,对应的动作叫Snap。每次Snap时,图像数据先从相机传到图像采集卡,然后再传到计算机的内存(图像处理缓冲区)中去,如图3.2所示。
机器视觉系统的5个主要组成结构介绍 从机器视觉系统字面意思就可看出主要分为三部分:机器、视觉和系统。机器负责机械的运动和控制;视觉通过照明光源、工业镜头、工业相机、图像采集卡等来实现;系统主要是指软件,也可理解为整套的机器视觉设备。下面我们重点说下机器视觉系统中的五大模块: 1.机器视觉光源(即照明光源) 照明光源作为机器视觉系统输入的重要部件,它的好坏直接影响输入数据的质量和应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的视觉光源,以达到最佳效果。常见的光源有:LED环形光源、低角度光源、背光源、条形光源、同轴光源、冷光源、点光源、线型光源和平行光源等。 2.工业镜头 镜头在机器视觉系统中主要负责光束调制,并完成信号传递。镜头类型包括:标准、远心、广角、近摄和远摄等,选择依据一般是根据相机接口、拍摄物距、拍摄范围、CCD尺寸、畸变允许范围、放大率、焦距和光圈等。 3.工业相机 工业相机在机器视觉系统中最本质功能就是将光信号转变为电信号,与普通相机相比,它具有更高的传输力、抗干扰力以及稳定的成像能力。按照不同标准可有多种分类:按输出信号方式,可分为模拟工业相机和数字工业相机;按芯片类型不同,可分CCD工业相机和CMOS工业相机,这种分类方式最为常见。 4.图像采集卡 图像采集卡虽然只是完整机器视觉系统的一个部件,但它同样非常重要,直接决定了摄像头的接口:黑白、彩色、模拟、数字等。比较典型的有PCI采集卡、1394采集卡、VGA 采集卡和GigE千兆网采集卡。这些采集卡中有的内置多路开关,可以连接多个摄像机,同时抓拍多路信息。 5.机器视觉软件
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
第9章数据库应用系统开发 本章将介绍开发数据库应用系统的基本步骤,然后以一个比较简单的学生管理系统为例,较为详细地介绍设计一个Visual FoxPro应用系统的开发过程,通过对数据库系统的开发实践来达到对所学知识的综合应用。 9.1数据库应用系统开发步骤 一个完整的数据库应用系统的设计开发应该包括两个方面:一是结构设计,即设计数据库框架和数据库结构;二是行为设计,即设计具体的应用程序。为了完成上述的设计目标,需要规范的设计方法和步骤。一般来说,数据库应用系统的开发包括以下几个步骤:需求分析、数据库设计、应用程序设计、软件测试、应用程序发布以及系统的运行和维护。 9.1.1需求分析 数据库应用系统的开发从系统的需求分析开始,它是整个开发过程的起点和基础。需求分析的目标是明确用户的具体要求,包括应用系统的功能结构、信息要求、处理要求、安全性与完整性的要求等具体的指标,并以需求分析报告的形式表达出来。 一般来说,需求分析需要从以下两个方面着手:数据分析和功能分析。数据分析是指通过合适的数据模型来描述系统所要处理的各种对象,建立关于对象的概念模型,再将概念模型转换为关系数据模型。功能分析是指确定系统边界,了解系统功能,确定哪些功能由计算机完成,哪些活动由人工完成。由计算机完成的功能就是系统应该实现的功能。 进行需求分析时应该注意以下一些问题:首先,需求分析必须建立在调查研究的基础上,包括访问用户,了解人工系统模型,采集相关资料等。为确保调查的客观性和正确性,系统调查工作应该严格按照自顶向下的系统化观点全面展开,逐层分析和了解。其次,在需求分析阶段就要建立基于用户需求的观念,主动和用户进行沟通,了解他们的需求和偏好,在系统实施的过程中也要及时接受用户的反馈信息,对系统进行适当的修正。 9.1.2数据库设计 数据库设计的任务主要包括概念结构的设计、逻辑结构的设计和物理结构设计。 数据库的概念结构是现实世界与机器世界的中介,它一方面能够充分地反映现实世界,包括实体和实体之间的联系,同时又易于向关系数据模型转换。在概念结构设计阶段,设计人员通过对现实世界的抽象,对实际的人、物、事和概念进行人为处理,抽取人们关心的共同特性,并把这些特性用各种概念精确地加以描述,从而形成一个具体的独立于数据库管理系统的概念模型。 数据库的逻辑结构设计是指将概念模型转化为关系数据库模型,根据系统分析的结果来确定该数据库中需要存储哪些信息,以及如何利用字段来合理地表示这些信息,从而定义出数据库中每个表所需的字段和数据类型。并在此基础上对数据进行优化,排除数据冗余,弥补数据漏洞,完善数据结构。最后完成数据库的逻辑结构设计,设计表的结构、字段约束关
机器视觉引导与定位 视觉引导与定位是工业机器人应用领域中广泛存在的问题。对于工作在自动化生产线上的工业机器人来说,其完成最多的一类操作是“抓取-放置”动作。为了完成这类操作,对被操作物体定位信息的获取是必要的,首先机器人必须知道物体被操作前的位姿,以保证机器人准确地抓取;其次是必须知道物体被操作后的目标位姿,以保证机器人准确地完成任务。在大部分的工业机器人应用场合,机器人只是按照固定的程序进行操作,物体的初始位姿和终止位姿是事先规定的,作业任务完成的质量由生产线的定位精度来保证。为了高质量作业,就要求生产线相对固定,定位精度高,这样的结果是生产柔性下降,成本却大大增加,此时生产线的柔性和产品质量是矛盾的。 视觉引导与定位是解决上述矛盾的理想工具。工业机器人可以通过视觉系统实时地了解工作环境的变化,相应调整动作,保证任务的正确完成。这种情况下,即使生产线的调整或定位有较大的误差也不会对机器人准确作业造成多大影响,视觉系统实际上提供了外部闭环控制机制,保证机器人自动补偿由于环境变化而产生的误差。 理想的视觉引导与定位应当是基于视觉伺服的。首先观察物体的大致方位,然后机械手一边运动一边观察机械手和物体之间的偏差,根据这个偏差调整机械手的运动方向,直到机械手和物体准确接触为止。但是这种定位方式在实现上存在诸多困难。 直接视觉引导与定位是一次性地对在机器人环境中物体的空间位姿进行详细描述,引导机器人直接地完成动作。与基于视觉伺服的方法相比,直接视觉引导的运算量大大减少,为实际应用创造了条件,但这必须基于一个前提:视觉系统能够在机器人空间中(基坐标系中)精确测定物体的三维位姿信息。 以上内容由深圳市科视创科技有限公司整理编辑,分享请注明出处
《机器视觉》教学大纲 课程编码:08241059 课程名称:机器视觉 英文名称:MACHINE VISION 开课学期:7 学时/学分:36/2 (其中实验学时:4 ) 课程类型:专业方向选修课 开课专业:机械工程及自动化 选用教材:贾云得编著《机器视觉》科学出版社 2002年 主要参考书: 1.ROBOTICS: Control, Sensing, Vision, and Intelligence, K. S. Fu,McGraw-Hill Publishing Company, 1987 2.张广军编著,机器视觉,科学出版社,2005年 执笔人:孔德文 本课程主要内容包括:二值图像分析、图像预处理、边缘检测、图像分割、纹理分析、明暗分析、彩色感知、深度图与立体视觉。通过本课程的学习,学生应掌握机器视觉的基础理论、基本方法和实用算法。 一、课程性质、目的与任务 机器视觉课程是机械工程及自动化专业在智能机器方向的一门专业方向选修课。机器智能化是机械学科的重要发展方向,也是国际上跨学科的热门研究领域。而机器视觉是智能机器的重要组成部分,它与图象处理、模式识别、人工智能、人工神经网络以及神经物理学及认知科学等都有紧密的关系。本课程对于开阔学生视野、使学生了解本专业的发展前沿,把学生培养成面向二十一世纪的复合型人才具有重要的地位和作用。通过本课程的学习,学生也能掌握一定的科学研究方法与技能,为有潜力成为研究型人才的学生打下一定基础。 二、教学基本要求 本课程主要内容包括:二值图像分析、图像预处理、边缘检测、图像分割、纹理分析、明暗分析、深度图与立体视觉。通过本课程的学习,学生应掌握机器视觉的基础理论、基本方法和实用算法。 本大纲仅列出达到教学基本要求的课程内容,不限制讲述的体系、方式和方法,列出的内容并非要求都讲,有些内容,可以通过自学达到教学基本要求。 使用CAI课件作为辅助教学手段可以节省大量时间,传递更多的信息量,所以本课程建议使用CAI课件。 作业是检验学生学习情况的重要教学环节,为了帮助学生掌握课程的基本内容,培养分析、运算的能力,建议布置作业5-8次,并在期末前安排一次综合作业作为主要考查环节。实验是教学的一个主要环节,实验时间共4学时,每次实验每小组4-6人,使每个学生均有亲自操作的机会。 三、各章节内容及学时分配 1.人类视觉与机器视觉 (4学时) : 人类视觉原理与视觉信息的处理过程;机器视觉理论框架与应用;成像几何学基础。
习题1 1、简述数据库系统的特点。 答:数据库系统的特点有: 1)数据结构化 在数据库系统中,采用统一的数据模型,将整个组织的数据组织为一个整体;数据不再仅面向特定应用,而是面向全组织的;不仅数据内部是结构化的,而且整体是结构化的,能较好地反映现实世界中各实体间的联系。这种整体结构化有利于实现数据共享,保证数据和应用程序之间的独立性。 2)数据共享性高、冗余度低、易于扩充 数据库中的数据能够被多个用户、多个应用程序共享。数据库中相同的数据不会多次重复出现,数据冗余度降低,并可避免由于数据冗余度大而带来的数据冲突问题。同时,当应用需求发生改变或增加时,只需重新选择不同的子集,或增加数据即可满足。 3)数据独立性高 数据独立性是由DBMS 的二级映像功能来保证的。数据独立于应用程序,降低了应用程序的维护成本。 4)数据统一管理与控制 数据库中的数据由数据库管理系统(DBMS )统一管理与控制,应用程序对数据的访问均经由DBMS 。DBMS 提供四个方面的数据控制功能:并发访问控制、数据完整性、数据安全性保护、数据库恢复。 2、什么是数据库系统? 答:在计算机系统上引入数据库技术就构成一个数据库系统(DataBase System ,DBS )。数据库系统是指带有数据库并利用数据库技术进行数据管理的计算机系统。DBS 有两个基本要素:一是DBS 首先是一个计算机系统;二是该系统的目标是存储数据并支持用户查询和更新所需要的数据。 3、简述数据库系统的组成。 答:数据库系统一般由数据库、数据库管理系统(及其开发工具)、数据库管理员(DataBase Administrator ,DBA )和用户组成。 4、试述数据库系统的三级模式结构。这种结构的优点是什么? 答:数据库系统的三级模式结构是指数据库系统是由外模式、模式和内模式三级构成,同时包含了二级映像,即外模式/模式映像、模式/内模式映像,如下图所示。 数据库应用1…… 外模式A 外模式B 模式 应用2应用3应用4应用5…… 模式 外模式/模式映像 模式/内模式映像 数据库系统的这种结构具有以下优点: (1)保证数据独立性。将外模式与模式分开,保证了数据的逻辑独立性;将内模式与模式分开,保证了数据的物理独立性。 (2)有利于数据共享,减少了数据冗余。 (3)有利于数据的安全性。不同的用户在各自的外模式下根据要求操作数据,只能对
机器视觉习题 一、证明题 1. 请证明:平面内共线四点的交比为射影变换不变量。 2.请证明:“仿射变换保持平行性”与“仿射变换将无穷远点变换为无穷远点”这两个命题是等价的。 3. 请证明:若某点的齐次坐标为123(,,)x x x ,非齐次坐标为(,)x y ,则有如下关系成立: 123 3 ,x x x y x x = = 4. 请证明:平面内过一点的线束比等于任一直线截该线束得到的共线四点的交比。 5. 设二维仿射变换的变换矩阵为: 11 121321 2223 31 32 33a a a T a a a a a a ?? ??=?????? 请证明必有31320a a ==。 6. 在视觉测量中,经常遇到A x =的齐次方程组形式 。证明上述方程组的解一 定是矩阵T A A 的最小特征值所对应的特征向量。 7. 请证明:平面上无穷远直线的方程可以表示为30x =。 8. 请证明:共线四点的交比是射影变换不变量。 9. 证明:仿射变换将无穷远点变换为无穷远点。 10. 证明:若平面上两点的齐次坐标分别为x ~和'~x ,则过该两点的直线可表示为: '~ ~~x x l ?= 11. 证明:仿射变换保持平行性
12.证明:若平面上两条直线分别为l ~和'~ l ,则该两条直线的交点可表示为: '~~~l l x ?= 二、简答题 1. 三维刚体变换的旋转矩阵R 为什么是正交的? 2. 在摄像机的线性标定中,加约束31=m 可以提高解算的稳定性。请说明该约束的含义? 3. 在Zhang 的平面靶标自由移动摄像机标定中,若平面靶标为等间隔正方形的棋盘格形状,则在这种情况下,即使正方形棋盘格的边长未精确已知,也不影响摄像机内部参数的标定。请说明为什么。 4. 在Tsai 的摄像机径向约束两步标定方法中,如何确定y T 的符号?并说明为什么可以这样确定。 5. 在双目立体匹配中,若极线约束未知,应如何利用极线约束更好地实现双目立体匹配。请给出实现步骤。 6. 请给出线结构光视觉传感器的几何本质解释。 7. 摄像机的标定已经完成。若已知空间两点A 和B 的距离,则可以确定A 和B 两点在摄像机坐标系下的三维坐标。请判断上述结论是否正确,并给出详细解释。 8. 请解释平行双目的三维测量模型中,视差D=0时的含义。 9. 基于平行纹理在摄像机上所成的像,如何确定在摄像机坐标系下,平行纹理所在空间平面的法向矢量? 10. 在基于基线长度的双目视觉传感器标定中,系数α的符号如何确定? 11. Hessian 矩阵的一维中心点提取中,要加判据011 ()[,]22x x -∈-,请解释为什 么? 12. 请给出双目视觉传感器极线约束表达式的几何含义。 13. 基于2D 平面靶标自由移动的摄像机标定中,若第二个位置的靶标平面平行 于第一个位置的靶标平面,则第二个位置的靶标平面与摄像机之间的二维摄
基于机器视觉的工业机器人定位系统 廖万辉 李琳 (华南理工大学机械与汽车工程学院机器人研究室,广州,510640) 【摘 要】建立了一个主动机器视觉定位系统,用于工业机器人对零件工位的精确定位。 采用基于区域的匹配和形状特征识别相结合的图像处理方法,该方法经过阈值和形状判据,识别出物体特征。经实验验证,该方法能够快速准确地得到物体的边界和质心,进行数据识别和计算,再结合机器人运动学原理控制机器人实时运动以消除此误差,满足工业机器人自定位的要求。 【关键词】工业机器人;机器视觉;图像识别;定位 Stereo Vision for Tracking and Location System Working on Industrial Robot Liao Wanhui and Li Lin (Robotics Research Laboratory, School of mechanic and auto engineering, South China University of Technology, China, 510640) Abstract: An active stereo vision for tracking and location system is built to work on industrial robot. A method combines area-based matching and the object’s shape to recognize object is proposed. It recognizes based on shape and segmentation. Test result showed that this method can correctly and quickly work out the boundary and centroid of object, the robot then moved to reduce the disparity as soon as possible based on the robot kinematics. It can achieve high rates of tracking and locating. Key words: Industrial robot;Stereo vision;Imaging recognition;Locating 文献标识码:B 中图分类号:TP24 1.引言 目前工业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对工业机器人的运动轨迹进行示教或离线编程,可节约大量的编程时间,提高生产效率和加工质量。 Hagger等人提出通过基于机器人末端与目标物体之间的误差进行视觉反馈的方法[1];Mezouar等人提出通过图像空间的路径规划和基于图像的控制方法 [2]。国内这方面主要应用于焊接机器人对焊缝的跟踪。 本文利用基于位置的视觉伺服思想,以六自由度垂直关节型喷涂机器人为载体,提出一种基于机器视觉的工业机器人自定位控制方法,解决了机器人末端实际位置与期望位置相距较远的问题,改善了喷涂机器人的定位精度。 2.视觉定位系统的组成 机器人视觉定位系统构成如图1所示,在关节型机器人末端安装喷涂工具、单个摄像机,使工件能完全出现在摄像机的图像中。系统包括摄像机系统和控制系统: (1)摄像机系统:由单个摄像机和计算机(包括图像采集卡)组成,负责视觉图像的采集和机器视觉算法; (2)控制系统:由计算机和控制箱组成,用来控制机器人末端的实际位置; 经CCD摄像机对工作区进行拍摄,计算机通过本文使用的图像识别方法,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置误差值,最后控制高精度的末端执行机构,调整机器人的位姿。 项目名称:基于机器人化护理床的社区医护远程监护系统研发及产业化 基金颁发部门:广东省科技厅基金号:20054982304 基金申请人:张铁 项目经济效益:50万元