3、网络分析:最短路径与最小生成树法。
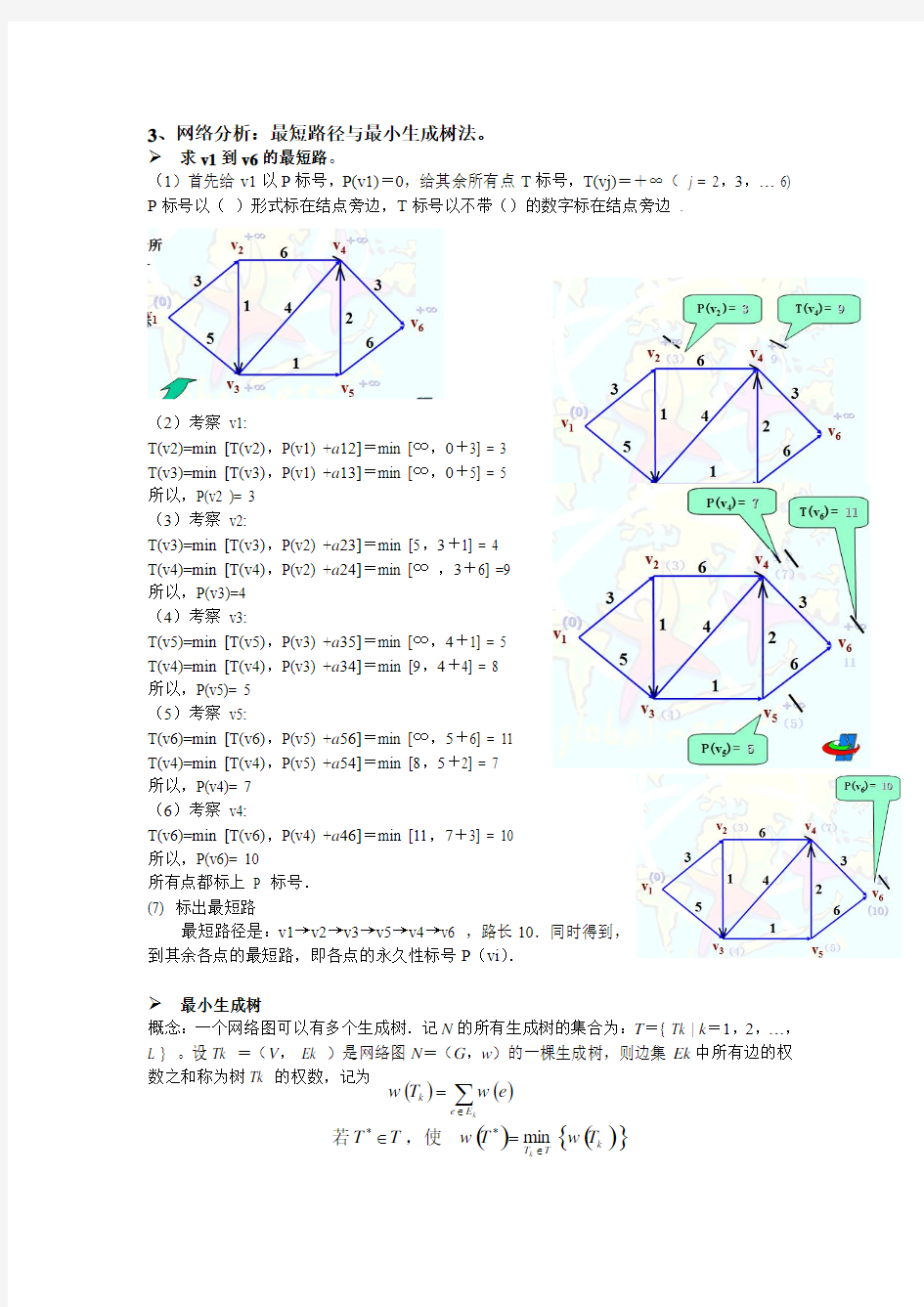
求v1到v6的最短路。
(1)首先给v1以P 标号,P(v1)=0,给其余所有点T 标号,T(vj)=+∞( j = 2,3,… 6) P 标号以( )形式标在结点旁边,T 标号以不带()的数字标在结点旁边
.
(2)考察 v1:
T(v2)=min [T(v2),P(v1) +a 12]=min [∞,0+3] = 3
T(v3)=min [T(v3),P(v1) +a 13]=min [∞,0+5] = 5
所以,P(v2 )= 3
(3)考察 v2:
T(v3)=min [T(v3),P(v2) +a 23]=min [5,3+1] = 4
T(v4)=min [T(v4),P(v2) +a 24]=min [∞ ,3+6] =9
所以,P(v3)=4
(4)考察 v3:
T(v5)=min [T(v5),P(v3) +a 35]=min [∞,4+1] = 5
T(v4)=min [T(v4),P(v3) +a 34]=min [9,4+4] = 8
所以,P(v5)= 5
(5)考察 v5:
T(v6)=min [T(v6),P(v5) +a 56]=min [∞,5+6] = 11
T(v4)=min [T(v4),P(v5) +a 54]=min [8,5+2] = 7
所以,P(v4)= 7
(6)考察 v4:
T(v6)=min [T(v6),P(v4) +a 46]=min [11,7+3] = 10
所以,P(v6)= 10
所有点都标上 P 标号.
(7) 标出最短路
最短路径是:v1→v2→v3→v5→v4→v6 ,路长10.同时得到,
到其余各点的最短路,即各点的永久性标号P (vi ).
最小生成树
概念:一个网络图可以有多个生成树.记N 的所有生成树的集合为:T ={ Tk | k =1,2,…,L } 。设Tk =(V , Ek )是网络图N =(G ,w )的一棵生成树,则边集Ek 中所有边的权数之和称为树Tk 的权数,记为
()()()(){}
k T T E e k T w T w T T e w T w k k ∈**∈=∈=∑min ,使若
则称T * 为网络N的一棵最小生成树,简称最小树.
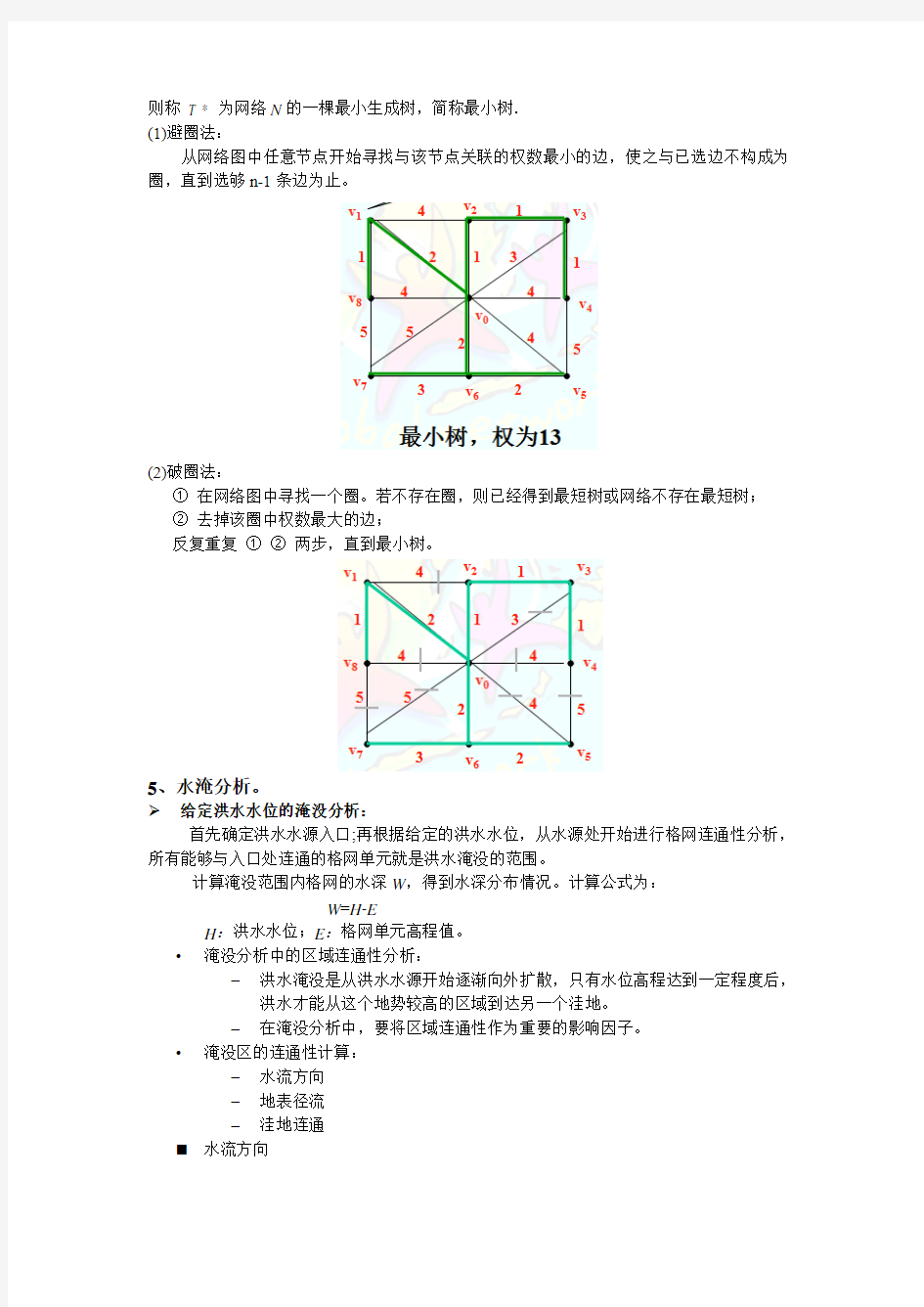
(1)避圈法:
从网络图中任意节点开始寻找与该节点关联的权数最小的边,使之与已选边不构成为圈,直到选够n-1条边为止。
(2)破圈法:
①在网络图中寻找一个圈。若不存在圈,则已经得到最短树或网络不存在最短树;
②去掉该圈中权数最大的边;
反复重复①②两步,直到最小树。
5、水淹分析。
给定洪水水位的淹没分析:
首先确定洪水水源入口;再根据给定的洪水水位,从水源处开始进行格网连通性分析,所有能够与入口处连通的格网单元就是洪水淹没的范围。
计算淹没范围内格网的水深W,得到水深分布情况。计算公式为:
W=H-E
H:洪水水位;E:格网单元高程值。
?淹没分析中的区域连通性分析:
–洪水淹没是从洪水水源开始逐渐向外扩散,只有水位高程达到一定程度后,洪水才能从这个地势较高的区域到达另一个洼地。
–在淹没分析中,要将区域连通性作为重要的影响因子。
?淹没区的连通性计算:
–水流方向
–地表径流
–洼地连通
?水流方向
由高向低沿着坡度最陡的方向流动。某点的水流方向:根据该点的8个相邻格网的高程来判断。
具体算法:
1)首先从水平、垂直四个方向的格网(灰色部分)高程中找出最大高程点h max1和最小高程点h min1;
2)从对角线的四个方向(白色部分)找出最大高程点h max2和最小高程点h min2;
3)对h max1和h max2进行比较:
d :DEM 格网间距; h :DEM 中当前点的高程。
选出的点即当前点的上游点(入水点)。
4)对h min1、h min2进行比较
选出的点为当前点的下游点(水流方向点)。
? 地表径流分析
进行径流分析前要先找出该区域的谷脊点。通过谷脊分析得到谷点和脊点后,可根据山谷线的特征获取山谷线,从而得到地表径流路径。
具体分析方法:
1) 每一条山谷线均由连续的局部极小值构成;
2) 对于某一条特定的山谷线,由其最高点(上游)往下游延伸的其它山谷线特征点的
高程值应越来越小;
3) 山谷线的终止条件:连接另一条山谷线;汇入湖泊或海洋;到达DEM 的边缘 总的来说,就是从谷点数组中找出高程最大的点作为当前山谷线的起始点,从该点沿水流方向向下游跟踪,直至终止。
? 洼地连通情况分析
包括两种情况:
1) 河流沟谷本来就终止于该洼地。通过山谷线分析得到山谷线,再根据水流
方向直接往下游追踪,最后得到与该沟谷(或河流)连接的洼地,得到两者的
连通关系。
2) 当被淹没的洼地水位到达一定程度时,水从洼地边缘漫出,流向其它较低
地区。通过分析找到洼地边缘和溢口,判断流水的溢出点及判断流水的流
向。
基于DEM 数据寻找洼地边缘方法:射线法、扩散法
射线法:
? 从平行线和铅垂线两个方向扫描洼地边缘点。
? 具体做法:
从洼地点数据集中取一个点,分别沿平行于X 轴和Y 轴的
方向扫描,逐点判断所扫描的点的VR(i,j)的值;
若VR(i,j)=1且为此方向扫描中的第一点,则该点为洼地边
缘点。
扩散法:也称子蔓延法。
)2max ,max max (21d h h d h h --)2min ,min max(21d h h d h h --
– 将洼地底点中的一个点作为种子点,向周围相邻的8个方向扩散。
– 扩散点中如果有VR (i ,j )值为1,则停止扩散,将该点作为边缘点,反之作为
种子点继续向外扩散。重复该过程,直至扫描完所有种子点。
? 洼地的溢口点:该洼地边缘点中高程值最小的点,从该点出发,根据水流方向进行
分析,可以得到溢出水流的方向,从而得到洼地间连通性的分析结果。
给定洪量的淹没分析
? 基本思想:
– 计算给定水位条件下的淹没区域的容积,将容积与洪量相比较;
– 利用二分法等逼近算法,找出与洪量最接近的容积,容积对应的淹没范围和
水深分布即最后的分析结果。
? 淹没区域的容积V 和洪水水位H 之间的关系:
A i :连通淹没区格网单元的面积;
E i :连通淹没区格网单元的高程;
M :连通淹没区格网单元的个数,由连通性分析求得。
? 定义一个淹没区域容积与洪量Q 的逼近函数F (H ):
? 使Q 和V 最接近,即求一个H 使得F (H )→ 0。F (H ):单调递减函数。用二分逼近算
法加速求解过程,用变步长方法加速其收敛过程。首先求一个水位H 1,使得F (H 1)<0再利用二分法求F (H )在(H 0, H 1)范围内趋近零的Hq 。Hq 对应的淹没范围和水深就是给定洪量条件下的淹没范围和水深。 ∑=-?=m i i i E H A V 1
)(∑
=-?-=-=m i i i E H A Q V Q H F 1
)()(
第八章 线性系统的状态空间分析与综合 习题及解答 8-1 已知电枢控制的直流伺服电机的微分方程组及传递函数 b a a a a a E dt di L i R U ++=+ dt d K E m b b θ= a m m i C M = dt d f dt d J M m m m m m θθ+=2 2 ) ()([)()(2m b m a a m m a m a m a m C K f R s R J f L s J L s C s U s ++++=Θ ⑴设状态变量m m x θ=1,m x θ =2,θ =3x 及输出量m y θ=,试建立其动态方程; ⑵设状态变量m m a x x i x θθ ===321,,及 m y θ=,试建立其动态方程。 解: (1)由题意可知: ??? ????=======123121x y x x x x x m m m m θθθθ , 由已知 ???????+===++=m m m m m a m m m b b a a a a a f J M i C M K E E i L i R U θθθ 可推导出 ????? ????=++-+-===1 233 3221x y U J L C x J L C K f R x J L R J L f x x x x x a m a m m a m b m a m a a m a m 由上式,可列动态方程如下
=??????????321x x x ??? ?? ? ? ?????? ?+- +- m a a m m a m a m b m a J L R J f L J L C K f R 01 00010??????????321x x x +??????? ? ????? ???m a m J L C 00 a U y =[]001???? ??????321x x x (2)由题意可知:,1a i x =m m m y x x θθθ===,,32 可推导出 ???????? ???==-=-====+--=+--==2 3133 231111x y x J f x J C J f i J C x x x U L x L K x L R U L L K i L R i x m m m m m m m m a m m m m a a a b a a a a m a b a a a a θθθθθ 可列动态方程如下 []?? ?? ??????=321010x x x y 由 ?????===m m m x x x θθθ 321和 ??? ??===m m a x x i x θθ 321 得 ??? ? ????? -=-======3 133221x J f x J C J f i J C x x x x x m m m m m m m a m m m m m θθθθ 由上式可得变换矩阵为 ?????? ? ??????? -=m m m m J f J C T 0100 010 8-2 设系统微分方程为 u y y y y 66116=+++ 。式中,u 和y 分别为系统输入和输出量。试列写可控标准型(即矩阵A 为友矩阵)及可观测标准型(即矩阵A 为友矩阵转置)状态空间表达式,并画出状态变量图。 解: 由题意可得: 10110010220330R K a b x L L L x a a a x x U a C f x x m m J J m m ?? ??--???? ?????? ??????????=+??????????????????????- ????????
【实验地点】课外(宿舍) 【实验目的】 1、学会利用MATLAB 实现离散系统传递函数模型的生成 2、学会利用MATLAB 将连续系统离散化 【实验设备与软件】 1、MATLAB/Simulink 数值分析软件 2、计算机一台 【实验原理】 1、求矩阵特征值和特征向量命令格式[V J]=eig (A ) Cv=eig(A) 说明:V 特征向量,J 是Jordan 型,cv 是特征值列向量 2、求运动的方法 (1)利用Laplace 逆变换----适合于连续/离散线性系统 采用ilaplace/iztrans 对传递函数求逆,这种方法一般是零输入情况下求响应。 (2)用连续(离散)状态转移矩阵表示系统解析解----适合于线性定常系统 对连续定常系统有: 假设初始时刻为零,LTI 系统的解析解为dt Bu e e x e t x t At At At ??+=0 )()0()(τ。若u (t )是单 位阶跃输入,则上述解可写成dtBu e e x e t x t At At At ? ?+=0 )()0()(τ。进一步简化为: Bu A Bu A x e t x At 11))0(()(---+= 对离散线性定常系统有: ∑---+ =1 1 )()0()(k i k k i Hu G x G k x
(3)状态方程的数值分析方法----适合于连续线性系统和非线性系统 采用直接数值积分很容易的处理各种定常/时变和线性/非线性系统。有很多数值积分方法,其中有一类预测-修正数值积分方法+自适应步长调整的算法比较有效。在MATLAB/Simulink 中包含的多种有效的、适用于不同类型的ODE 求解算法,典型的是Runge-Ktuta 算法,其通常使用如下的函数格式: [t,x]=ode45(odefun,[ti,tf],x0,options)----采用四阶、五阶Runge-Ktuta 算法 [t,x]=ode23(odefun,[ti,tf],x0,options)----采用二阶、三阶Runge-Ktuta 算法 说明:a.这两个函数是求解非刚性常微分方程的函数。 b.参数options 为积分的误差设置,取值为相对误差‘reltol ’和绝对误差‘abstol ’;[ti,tf]求解的时间围;x0是初值是初值向量;[t,x]是解。 (4)利用CotrolToolBox 的离散化求解函数----适合于TLI 系统 用step ()/impulse()函数求取阶跃输入/冲激输入时系统的状态响应: 当系统G 是连续的情况下: 调用[y,t,x]=step/impulse(G )会自动对连续系统G 选取采样时间围和周期; 调用[y,t,x]=step/impulse(G ,ti:Ts:tf)由用户自己定义对连续系统G 的样时间围和周期; 当系统G 是离散的情况下: 调用[y,t,x]=step/impulse(G )会按离散系统G 给出的采样周期计算; 调用[y,t,x]=step/impulse(G ,ti:Ts:tf)是Ts 必须与离散系统G 的采样时间围和周期一致。 另外lsim()函数调用格式:[y,x,t]=lsim(G,u,ti,TS,tf,x0) 零输入响应调用函数initial (),格式:[y,x,t]=(G,x0) (5)利用simulink 环境求取响应----适用于所有系统求取响应 使用simulink 求取线性或非线性系统的响应,调用格式如下: [t,x,y]=sim(‘XX.mdl ’,ti:Ts:tf,options,u) 【实验容】 已知线性系统:]) (201)() (2 10)(404040202119201921)(t x t y t u t x t x +-----? 已知线性系统 1、利用Matlab 求零状态下的阶跃响应(包括状态和输出),生成两幅图:第一幅绘制各状态响应曲线并标注;第二幅绘制输出响应曲线。
平面连杆机构的运动分析和动力分析1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) ≤其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm 最短杆长度+最长杆长度(125.36+50.1) ≤其余两杆长度之和(109.8+72.85) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第三组(3代)四杆机构L1=163.2mm,L2=61.6mm,L3=150mm,L4=90mm 最短杆长度+最长杆长度(163.2+61.6) ≤其余两杆长度之和(150+90) 最短杆为连架杆,四杆机构为曲柄摇杆机构 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 图1机构结构简图 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别为L1 、L2 、L3 、L4 , 其方位角为、、、。以各杆矢量组成一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即:
实验空间分析基本操作 一、实验目的 1. 了解基于矢量数据和栅格数据基本空间分析的原理和操作。 2. 掌握矢量数据与栅格数据间的相互转换、栅格重分类(Raster Reclassify)、栅格计算-查询符合条件的栅格(Raster Calculator)、面积制表(Tabulate Area)、分区统计(Zonal Statistic)、缓冲区分析(Buffer) 、采样数据的空间内插(Interpolate)、栅格单元统计(Cell Statistic)、邻域统计(Neighborhood)等空间分析基本操作和用途。 3. 为选择合适的空间分析工具求解复杂的实际问题打下基础。 二、实验准备 预备知识: 空间数据及其表达 空间数据(也称地理数据)是地理信息系统的一个主要组成部分。空间数据是指以地球表面空间位置为参照的自然、社会和人文经济景观数据,可以是图形、图像、文字、表格和数字等。它是GIS所表达的现实世界经过模型抽象后的内容,一般通过扫描仪、键盘、光盘或其它通讯系统输入GIS。 在某一尺度下,可以用点、线、面、体来表示各类地理空间要素。 有两种基本方法来表示空间数据:一是栅格表达; 一是矢量表达。两种数据格式间可以进行转换。 空间分析 空间分析是基于地理对象的位置和形态的空间数据的分析技术,其目的在于提取空间信息或者从现有的数据派生出新的数据,是将空间数据转变为信息的过程。 空间分析是地理信息系统的主要特征。空间分析能力(特别是对空间隐含信息的提取和传输能力)是地理信息系统区别与一般信息系统的主要方面,也是评价一个地理信息系统的主要指标。 空间分析赖以进行的基础是地理空间数据库。 空间分析运用的手段包括各种几何的逻辑运算、数理统计分析,代数运算等数学手段。 空间分析可以基于矢量数据或栅格数据进行,具体是情况要根据实际需要确定。 空间分析步骤 根据要进行的空间分析类型的不同,空间分析的步骤会有所不同。通常,所有的空间分析都涉及以下的基本步骤,具体在某个分析中,可以作相应的变化。 空间分析的基本步骤: a)确定问题并建立分析的目标和要满足的条件 b)针对空间问题选择合适的分析工具 c)准备空间操作中要用到的数据。 d)定制一个分析计划然后执行分析操作。 e)显示并评价分析结果
空间分析的概念空间分析:是基于地理对象的位置和形态特征的空间数据分析技术,其目的在于提取和传输空间信息。包括空间数据操作、空间数据分析、空间统计分析、空间建模。 空间数据的类型空间点数据、空间线数据、空间面数据、地统计数据 属性数据的类型名义量、次序量、间隔量、比率量 属性:与空间数据库中一个独立对象(记录)关联的数据项。属性已成为描述一个位置任何可记录特征或性质的术语。 空间统计分析陷阱1)空间自相关:“地理学第一定律”—任何事物都是空间相关的,距离近的空间相关性大。空间自相关破坏了经典统计当中的样本独立性假设。避免空间自相关所用的方法称为空间回归模型。2)可变面元问题MAUP:随面积单元定义的不同而变化的问题,就是可变面元问题。其类型分为:①尺度效应:当空间数据经聚合而改变其单元面积的大小、形状和方向时,分析结果也随之变化的现象。②区划效应:给定尺度下不同的单元组合方式导致分析结果产生变化的现象。3)边界效应:边界效应指分析中由于实体向一个或多个边界近似时出现的误差。生态谬误在同一粒度或聚合水平上,由于聚合方式的不同或划区方案的不同导致的分析结果的变化。(给定尺度下不同的单元组合方式) 空间数据的性质空间数据与一般的属性数据相比具有特殊的性质如空间相关性,空间异质性,以及有尺度变化等引起的MAUP效应等。一阶效应:大尺度的趋势,描述某个参数的总体变化性;二阶效应:局部效应,描述空间上邻近位置上的数值相互趋同的倾向。 空间依赖性:空间上距离相近的地理事物的相似性比距离远的事物的相似性大。 空间异质性:也叫空间非稳定性,意味着功能形式和参数在所研究的区域的不同地方是不一样的,但是在区域的局部,其变化是一致的。 ESDA是在一组数据中寻求重要信息的过程,利用EDA技术,分析人员无须借助于先验理论或假设,直接探索隐藏在数据中的关系、模式和趋势等,获得对问题的理解和相关知识。 常见EDA方法:直方图、茎叶图、箱线图、散点图、平行坐标图 主题地图的数据分类问题等间隔分类;分位数分类:自然分割分类。 空间点模式:根据地理实体或者时间的空间位置研究其分布模式的方法。 茎叶图:单变量、小数据集数据分布的图示方法。 优点是容易制作,让阅览者能很快抓住变量分布形状。缺点是无法指定图形组距,对大型资料不适用。 茎叶图制作方法:①选择适当的数字为茎,通常是起首数字,茎之间的间距相等;②每列标出所有可能叶的数字,叶子按数值大小依次排列;③由第一行数据,在对应的茎之列,顺序记录茎后的一位数字为叶,直到最后一行数据,需排列整齐(叶之间的间隔相等)。 箱线图&五数总结 箱线图也称箱须图需要五个数,称为五数总结:①最小值②下四分位数:Q1③中位数④上四分位数:Q3⑤最大值。分位数差:IQR = Q3 - Q1 3密度估计是一个随机变量概率密度函数的非参数方法。 应用不同带宽生成的100个服从正态分布随机数的核密度估计。 空间点模式:一般来说,点模式分析可以用来描述任何类型的事件数据。因为每一事件都可以抽象化为空间上的一个位置点。 空间模式的三种基本分布:1)随机分布:任何一点在任何一个位置发生的概率相同,某点的存在不影响其它点的分布。又称泊松分布
空间数据分析报告 —使用Moran's I统计法实现空间自相关的测度1、实验目的 (1)理解空间自相关的概念和测度方法。 (2)熟悉ArcGIS的基本操作,用Moran's I统计法实现空间自相关的测度。2、实验原理 2.1空间自相关 空间自相关的概念来自于时间序列的自相关,所描述的是在空间域中位置S 上的变量与其邻近位置Sj上同一变量的相关性。对于任何空间变量(属性)Z,空间自相关测度的是Z的近邻值对于Z相似或不相似的程度。如果紧邻位置上相互间的数值接近,我们说空间模式表现出的是正空间自相关;如果相互间的数值不接近,我们说空间模式表现出的是负空间自相关。 2.2空间随机性 如果任意位置上观测的属性值不依赖于近邻位置上的属性值,我们说空间过程是随机的。 Hanning则从完全独立性的角度提出更为严格的定义,对于连续空间变量Y,若下式成立,则是空间独立的: 式中,n为研究区域中面积单元的数量。若变量时类型数据,则空间独立性的定义改写成 式中,a,b是变量的两个可能的类型,i≠j。 2.3Moran's I统计 Moran's I统计量是基于邻近面积单元上变量值的比较。如果研究区域中邻近面积单元具有相似的值,统计指示正的空间自相关;若邻近面积单元具有不相似的值,则表示可能存在强的负空间相关。
设研究区域中存在n 个面积单元,第i 个单位上的观测值记为y i ,观测变量在n 个单位中的均值记为y ,则Moran's I 定义为 ∑∑∑∑∑======n i n j ij n i n j ij n i W W n I 11 11j i 1 2i ) y -)(y y -(y )y -(y 式中,等号右边第二项∑∑==n 1i n 1j j i ij )y -)(y y -(y W 类似于方差,是最重要的项,事 实上这是一个协方差,邻接矩阵W 和) y -)(y y -(y j i 的乘积相当于规定)y -)(y y -(y j i 对邻接的单元进行计算,于是I 值的大小决定于i 和j 单元中的变量值对于均值的偏离符号,若在相邻的位置上,y i 和y j 是同号的,则I 为正;y i 和y j 是异号的, 则I 为负。在形式上Moran's I 与协变异图 {}{}u ?-)Z(s u ?-)Z(s N(h)1(h)C ?j i ∑=相联系。 Moran's I 指数的变化范围为(-1,1)。如果空间过程是不相关的,则I 的期望接近于0,当I 取负值时,一般表示负自相关,I 取正值,则表示正的自相关。用I 指数推断空间模式还必须与随机模式中的I 指数作比较。 通过使用Moran's I 工具,会返回Moran's I Index 值以及Z Score 值。如果Z score 值小于-1.96获大于1.96,那么返回的统计结果就是可采信值。如果Z score 为正且大于1.96,则分布为聚集的;如果Z score 为负且小于-1.96,则分布为离散的;其他情况可以看作随机分布。 3、实验准备 3.1实验环境 本实验在Windows 7的操作系统环境中进行,使用ArcGis 9.3软件。 3.2实验数据 此次实习提供的数据为以湖北省为目标区域的bount.dbf 文件。.dbf 数据中包括第一产业增加值,第二产业增加值万元,小学在校学生数,医院、卫生院床位数,乡村人口万人,油料产量,城乡居民储蓄存款余额,棉花产量,地方财政一般预算收入,年末总人口(万人),粮食产量,普通中学在校生数,肉类总产量,规模以上工业总产值现价(万元)等属性,作为分析的对象。
状态空间法分析及其应用的特点 摘要 基于为寻求便于分析系统的性能的相应状态变量以及探究状态空间变量线性变换对系统性能的影响,来阐述状态空间分析法的特点。通过应用状态空间法到绞线一叠层橡胶复合支座隔震结构进行数值模拟分析中来进一步阐述其特点,将结构控制理论中的结构状态空间法应用到该复合支座隔震结构的数值模拟分析中。建立了普通框架、安装叠层橡胶支座和安装绞线一叠层橡胶复合支座框架的结构状态方程,应用MATLAB/SIMULINK工具箱建立结构仿真模型,得出不同条件下框架结构的时程反应曲线。通过对比分析可以看出绞线一叠层橡胶复合支座能很好地改变结构的隔震效果,应用状态空间法进行绞线一叠层橡胶复合支座隔震结构的数值模拟分析简单准确。 关键词:系统、传递函数、线性变换、状态空间变量
一、引言 状态空间分析从实质上说并不是什么新颖的东西,其关键思想起源予19世纪到拉格朗日、哈密顿等人在研究经典力学时提出的广义坐标与变分法。当然,由高斯等人奠定的古典概率、估计理论以及线性代数等也具有同样的重要性。上世纪40年代以来,布利斯、庞德里亚金和别尔曼关于极大值原理,卡尔曼、布西与巴丁等人提出的卡尔曼滤波理论,以及许许多多的学者完成的并不具有里程碑意义的研究成果,积累起来却对算法及分析结果产生了决定性意义的贡献。这些便是状态空间方法发展的历史概况。状态空间分析是对线性代数、微分方程、数值方法、变分法、随机过程以及控制理论等应用数学各学科的综台。对动态系统的性能分析,特别是对扰动的响应、稳定性的特性、估计与误差分析以及对控制律的设计及性能评估,这些便构成状态空间分析的内容。这主要表现在利用向量、矩阵等一整套数学符合,把大量资料加以整理与综合,形成了观念上统一的体系——60年代中期之后出现了现代控制理论。 状态空间分析随着动力学与控制问题维数的增加(其中包括坐标、敏感器、执行机构以及其它装置的数量)而越发显得重要。另一方面亦由于计算机软件的不断完善,特别在可靠性及用户接口方面的改善与进展,使得计算工作比以前任何时候都易于进行,使状态空间分析越发显得有生命力。它具有的特性使得在设计控制系统时,不在只局限于输入量、输出量和误差量,为提高系统性能提供了有力的工具,加之可以利用计算机进行分析设计及实时控制,因而可以应用于非线性系统、时变系统、多输入—多输出系统以及随机过程等。
一、名词解释(七选五) 1、地理信息 地理信息是指与空间地理分布有关的信息,它表示地表物体和环境固有的数量、质量、分布特征,联系和规律的数字、文字、图形、图象等的总称。 2、空间插值 空间插值常用于将离散点的测量数据转换为连续的数据曲面,以便与其他空间现象的分布模式进行比较。 3、TIN 根据点集将区域划分为相等的三角面网络,能按地形特征点表示数字高程。 4、重分类 即基于原有数值,对原有数值重新进行分类整理从而得到一组新值并输出。 5、DEM 数字高程模型。它是用一组有序数值以阵列形式表示地面高程的一种实体地面模型。 6、泰森多边形 用多边形内所包含的惟一一个气象站的降雨强度来表示这个多边形区域内的降雨强度,该多边形称为泰森多边形。 7、分类区统计 分类区统计即以一个数据集为基础在它所包含的不同类别中对另一个被分类的数据进行统计。 二、简答题 1、什么是空间分析? 空间分析是集空间数据分析和空间模拟于一体的技术方法,通过地理计算和空间表达挖掘潜在空间信息。
2、矢量数据叠置分析的概念,在ArcGIS软件里有哪些操作? 叠加分析是指将同一地区、同一比例尺、同一数学基础,不同信息表达的两组或多组专题要素的图形或数据文件进行叠加,根据各类要素与边界的交点或属性建立具有多重属性组合的新图层,并对在结构和属性相互重叠,相互联系的多种现象要素进行综合分析;从而深入揭示各种现象要素的内在联系及其发展规律的一种空间分析方法。 叠加分析操作包括擦除、标识、相交、空间连接、交集取反、联合、更新。 3、什么是探索性空间数据分析,其主要应用是什么? 是利用统计学原理和图形图表相结合对空间数据的性质进行分析、鉴别,用以引导确定性模型的结构和解法的一种技术。包括检查数据是否有错误、获得数据的分布特征、对数据规律的初步考察。 4、什么是邻域分析,分析窗口的类型有哪些? 是通过空间点周围的邻点,或某特定位置及方向范围内的邻点,对其进行分析的一种方法。提供了4种窗口:长方形、环形、即圆形、即楔形。 5、什么是邻近度?缓冲区分析的概念? 邻近度:是表示地理空间中两个目标地物距离相近的程度。 缓冲区分析:是对一组或一类地物按缓冲的距离条件,建立缓冲区多边形,然后将这一图层与需要进行缓冲区分析的图层进行叠加分析,得到所需结果的一种空间分析方法。 6、什么是网络分析?网络分析的分类,分别应用在什么方面? 网络分析:是通过研究网络的状态以及模拟和分析资源在网络上的流动和分配情况,对网络结构及其资源等的优化问题进行研究的一种空间分析方法。 网络分析分为效用网络分析和交通网络分析。 功能:(1)路径分析(2)连通分析(3)资源分配(4)流分析(5)动态分段(6)地址匹配。 7、空间插值的方法有哪些,分别描述其插值特点? A.确定性插值法:是使用数学函数进行插值,以研究区域内部的相似性。
同批工件间同时到达的耦合关系? 工件本来是一个个到达,如C-C+1-C+2,但考虑为批次同时到达,C 可以直接到C+2; 基于更新过程的关键更新定理,将小车与B2、B4间的耦合关系用节点间的批量到达速率、批量离开速率变化替代?B2的输出与B4的输入之间相互依赖 节点二: 两次小车装载之间通常会有多个工件到达B2,在小车两次到达的间隔中B2内的工件数量曲线是单调非减的。因此,实际上小车回到B2时B2拥有的工件数量的期望(锯齿的上尖点)远远比稳态后(稳态后不变,中间水平线)计算的期望要大 节点四: 实际上小车来到B4时B4拥有的工件数量的期望远远比稳态后计算的期望要小,当小车容量C 越大、小车速度越慢(保持当量运载能力不变)的时候这个偏差越明显,这样将提高小车由于阻塞停留在B4处的计算概率(实际堵塞概率比计算值要小),降低前环节的处理能力。 平均在制品数量: ()()()() ()121112223331122334444444441112123 ,,,01 01 11 11C 4,,201 1 WIP=; N N C S w b S w b S w b b w b w b w N i S w b S w b w w P w P w P w P w P N +======+===?+?+?+?+?∑∑∑∑∑∑∑ ∑∑ 第4项改为乘以W4;第五项(节点四在制品数期望)就是小车阻塞的概率乘以节点4的个数 (N4+1) 状态之间的转换速率:存在概率路径,则用概率路径乘以速率,不存在概率路径,则直接用速率。实际上概率路径之和一定=1 1 i b =-0 i b =1 i b =2 i b = B2 B4 节点3:2C+2个状态对应2C+2个方程 右边第一项:上标为W3,漏了V ,第二项是只可能是从小车上只有一个变为空车返回状态
第7 章空间数据分析模型 7.1 空间数据 按照空间数据的维数划分,空间数据有四种基本类型:点数据、线数据、面数据和体数据。 点是零维的。从理论上讲,点数据可以是以单独地物目标的抽象表达,也可以是地理单元的抽象表达。这类点数据种类很多,如水深点、高程点、道路交叉点、一座城市、一个区域。 线数据是一维的。某些地物可能具有一定宽度,例如道路或河流,但其路线和相对长度是主要特征,也可以把它抽象为线。其他的线数据,有不可见的行政区划界,水陆分界的岸线,或物质运输或思想传播的路线等。 面数据是二维的,指的是某种类型的地理实体或现象的区域范围。国家、气候类型和植被特征等,均属于面数据之列。 真实的地物通常是三维的,体数据更能表现出地理实体的特征。一般而言,体数据被想象为从某一基准展开的向上下延伸的数,如相对于海水面的陆地或水域。在理论上,体数据可以是相当抽象的,如地理上的密度系指单位面积上某种现象的许多单元分布。 在实际工作中常常根据研究的需要,将同一数据置于不同类别中。例如,北京市可以看作一个点(区别于天津),或者看作一个面(特殊行政区,区别于相邻地区),或者看作包括了人口的“体”。 7.2 空间数据分析 空间数据分析涉及到空间数据的各个方面,与此有关的内容至少包括四个领域。 1)空间数据处理。空间数据处理的概念常出现在地理信息系统中,通常指的是空间分析。就涉及的内容而言,空间数据处理更多的偏重于空间位置及其关系的分析和管理。 2)空间数据分析。空间数据分析是描述性和探索性的,通过对大量的复杂数据的处理来实现。在各种空间分析中,空间数据分析是重要的组成部分。空间数据分析更多的偏重于具有空间信息的属性数据的分析。 3)空间统计分析。使用统计方法解释空间数据,分析数据在统计上是否是“典型”的,或“期望”的。与统计学类似,空间统计分析与空间数据分析的内容往往是交叉的。 4)空间模型。空间模型涉及到模型构建和空间预测。在人文地理中,模型用来预测不同地方的人流和物流,以便进行区位的优化。在自然地理学中,模型可能是模拟自然过程的空间分异与随时间的变化过程。空间数据分析和空间统计分析是建立空间模型的基础。 7.3 空间数据分析的一些基本问题 空间数据不仅有其空间的定位特性,而且具有空间关系的连接属性。这些属性主要表现为空间自相关特点和与之相伴随的可变区域单位问题、尺度和边界效应。传统的统计学方法在对数据进行处理时有一些基本的假设,大多都要求“样本是随机的”,但空间数据可能不一定能满足有关假设,因此,空间数据的分析就有其特殊性(David,2003)。
An Introduction to Spatial Autocorrelation Analysis with GeoDa Luc Anselin Spatial Analysis Laboratory Department of Agricultural and Consumer Economics University of Illinois, Urbana-Champaign https://www.doczj.com/doc/fb7421700.html,/ June 16, 2003 Introduction This is a quick tour of GeoDa, illustrating its main features for analyzing and visualizing spatial autocorrelation. It assumes very little, and should be doable “out of the box” without having to refer to more extensive information. It assumes you are familiar with the technical concepts related to spatial autocorrelation analysis, and with the basic operation of GeoDa, as covered in the Introduction to EDA with GeoDa document. It does not replace the User’s Guide. This note refers to GeoDa 0.9.3., June 4, 2003. To get started, load the SIDS shape file and make sure the rate variables SIDR74 and SIDR79 have been constructed. Also, start a second instance of GeoDa with the St Louis homicide data set. Refer to the Introduction to EDA with GeoDa document for details. Constructing Spatial Weights The first step in the analysis of spatial autocorrelation is to construct a spatial weights file that contains information on the “neighborhood” structure for each location. GeoDa has many ways to create spatial weights. For now, only simple first order contiguity weights will be considered. You start the process by selecting Weights > Create from the Tools menu (Figure 1), or by clicking on the Create Weights button on the toolbar (Figure 2). Note that the Tools menu can also be invoked without having a project open, allowing the creation of weights files for use in programs other than GeoDa. Figure 1. Weights creation by means of the Tools Menu. Figure 2. Weights creation by means of the toolbar button.
第8章控制系统的状态空间分析与综合 第1~7章涉及的内容属于经典控制理论的范畴,系统的数学模型是线性定常微分方程和传递函数,主要的分析与综合方法是时域法、根轨迹法和频域法。经典控制理论通常用于单输入-单输出线性定常系统,其缺点是只能反映输入-输出间的外部特性,难以揭示系统内部的结构和运行状态,不能有效处理多输入-多输出系统、非线性系统、时变系统等复杂系统的控制问题。 随着科学技术的发展,对控制系统速度、精度、适应能力的要求越来越高,经典控制理论已不能满足要求。1960年前后,在航天技术和计算机技术的推动下,现代控制理论开始发展,一个重要的标志就是美国学者卡尔曼引入了状态空间的概念。它是以系统内部状态为基础进行分析与综合的控制理论,两个重要的内容如下。 (1)最优控制:在给定的限制条件和评价函数下,寻求使系统性能指标最优的控制规律。 (2)最优估计与滤波:在有随机干扰的情况下,根据测量数据对系统的状态进行最优估计。 本章讨论控制系统的状态空间分析与综合,它是现代控制理论的基础。 8.1 控制系统的状态空间描述 8.1.1 系统数学描述的两种基本方法 图8-1 典型控制系统方块图 典型控制系统如图8-1所示,由被控对象、传感器、执行器和控制器组成。被控过程 327
328 (见图8-2)具有若干输入端和输出端。数学描述通常有两种基本方法:一种是输入、输出描述(外部描述),它将系统看成为“黑箱”,只是反映输入与输出间的关系,而不去表征系统的内部结构和内部变量,如传递函数;另一种是状态空间描述(内部描述),它是基于系统内部结构的一种数学模型,由两个方程组成。一个反映系统内部变量x 和输入变量u 间的关系,具有一阶微分方程组或一阶差分方程组的形式;另一个是表征系统输出向量y 与内部变量及输入变量间的关系,具有代数方程的形式。外部描述虽能反映系统的外部特性,却不能反映系统内部的结构与运行过程,内部结构不同的两个系统也可能具有相同的外部特性,因此外部描述通常是不完整的;内部描述则能全面完整地反映出系统的动力学特征。 8.1.2 状态空间描述常用的基本概念 1.输入和输出 由外部施加到系统上的激励称为输入,若输入是按需要人为施加的,又称为控制;系统的被控量或从外部测量到的系统信息称为输出,若输出是由传感器测量得到的,又称为观测。 2.状态、状态变量和状态向量 能完整描述和惟一确定系统时域行为或运行过程的一组独立(数目最小)的变量称为系统的状态,其中的各个变量称为状态变量。当状态表示成以各状态变量为分量组成的向量时,称为状态向量。系统的状态)(t x 由0t t =时的初始状态x (0t ) 及0t t ≥的输入)(t u 惟一确定。 对n 阶微分方程描述的系统,当n 个初始条件)(,),(),(0)1(00t x t x t x n -Λ&及0t t ≥的输入)(t u 给定时,可惟一确定方程的解,故)1(,,,-n x x x Λ&这n 个独立变量可选作状态变量。状态对于确定系统的行为既是必要的,也是充分的。n 阶系统状态变量所含独立变量的个数为n ,当变量个数小于n 时,便不能完全确定系统的状态,而当变量个数大于n 时,则存在多余的变量,这些多余的变量就不是独立变量。判断变量是否独立的基本方法是看它们之间是否存在代数约束。 状态变量的选取并不惟一,一个系统通常有多种不同的选取方法。但应尽量选取能测
空间分析实习报告 学院遥感信息工程学院班级 学号 姓名 日期
一、实习内容简介 1.实验目的: (1)通过实习了解ArcGIS的发展,以及10.1系列软件的构成体系 (2)熟练掌握ArcMap的基本操作及应用 (3)了解及应用ArcGIS的分析功能模块ArcToolbox (4)加深对地理信息系统的了解 2.实验内容: 首先是对ArcGIS有初步的了解。了解ArcGIS的发展,以及10.1系列软件的构成体系,了解桌面产品部分ArcMap、ArcCatalog和ArcToolbox的相关基础知识。 实习一是栅格数据空间分析,ArcGIS软件的Spatial Analyst模块提供了强大的空间分析工具,可以帮助用户解决各种空间分析问题。利用老师所给的数据可以创建数据(如山体阴影),识别数据集之间的空间关系,确定适宜地址,最后寻找一个区域的最佳路径。 实习二是矢量数据空间分析,ArcToolbox软件中的Analysis Tools和Network Analyst Tools提供了强大的矢量数据处理与分析工具,可以帮助用户解决各种空间分析问题。利用老师所给的数据可以通过缓冲区分析得到矢量面数据,通过与其它矢量数据的叠置分析、临近分析来辅助选址决策过程;可以构建道路平面网络模型,进而通过网络分析探索最优路径,从而服务于公交选线、智能导航等领域。 实习三是三维空间分析,学会用ArcCatalog查找、预览三维数据;在ArcScene中添加数据;查看数据的三维属性;从二维要素与表面中创建新的三维要素;从点数据源中创建新的栅格表面;从现有要素数据中创建TIN表面。 实习四是空间数据统计分析,利用地统计分析模块,你可以根据一个点要素层中已测定采样点、栅格层或者利用多边形质心,轻而易举地生成一个连续表面。这些采样点的值可以是海拔高度、地下水位的深度或者污染值的浓度等。当与ArcMap一起使用时,地统计分析模块提供了一整套创建表面的工具,这些表面能够用来可视化、分析及理解各种空间现象。 实习五是空间分析建模,空间分析建模就是运用GIS空间分析方法建立数学模型的过程。按照建模的目的,可分为以特征为主的描述模型(descriptive model)和提供辅助决策信息和解决方案为目的的过程模型(process model)两类。本次实习主要是通过使用ArcGIS的模型生成器(Model Builder)来建立模型,从而处理涉及到许多步骤的空间分析问题。 二、实习成果及分析 实习一: 练习1:显示和浏览空间数据。利用ArcMap和空间分析模块显示和浏览数据。添加和显示各类空间数据集、在地图上高亮显示数值、查询指定位置的属性值、分析一张直方图和创建一幅山体阴影图。
ARCGIS空间分析基本操作 一、实验目的 1. 了解基于矢量数据和栅格数据基本空间分析的原理和操作。 2. 掌握矢量数据与栅格数据间的相互转换、栅格重分类(Raster Reclassify)、栅格计算-查询符合条件的栅格(Raster Calculator)、面积制表(Tabulate Area)、分区统计(Zonal Statistic)、缓冲区分析(Buffer) 、采样数据的空间内插(Interpolate)、栅格单元统计(Cell Statistic)、邻域统计(Neighborhood)等空间分析基本操作和用途。 3. 为选择合适的空间分析工具求解复杂的实际问题打下基础。 二、实验准备 预备知识: 空间数据及其表达 空间数据(也称地理数据)是地理信息系统的一个主要组成部分。空间数据是指以地球表面空间位置为参照的自然、社会和人文经济景观数据,可以是图形、图像、文字、表格和数字等。它是GIS所表达的现实世界经过模型抽象后的内容,一般通过扫描仪、键盘、光盘或其它通讯系统输入GIS。 在某一尺度下,可以用点、线、面、体来表示各类地理空间要素。 有两种基本方法来表示空间数据:一是栅格表达; 一是矢量表达。两种数据格式间可以进行转换。
空间分析 空间分析是基于地理对象的位置和形态的空间数据的分析技术,其目的在于提取空间信息或者从现有的数据派生出新的数据,是将空间数据转变为信息的过程。 空间分析是地理信息系统的主要特征。空间分析能力(特别是对空间隐含信息的提取和传输能力)是地理信息系统区别与一般信息系统的主要方面,也是评价一个地理信息系统的主要指标。 空间分析赖以进行的基础是地理空间数据库。 空间分析运用的手段包括各种几何的逻辑运算、数理统计分析,代数运算等数学手段。 空间分析可以基于矢量数据或栅格数据进行,具体是情况要根据实际需要确定。 空间分析步骤 根据要进行的空间分析类型的不同,空间分析的步骤会有所不同。通常,所有的空间分析都涉及以下的基本步骤,具体在某个分析中,可以作相应的变化。 空间分析的基本步骤: a)确定问题并建立分析的目标和要满足的条件 b)针对空间问题选择合适的分析工具 c)准备空间操作中要用到的数据。 d)定制一个分析计划然后执行分析操作。 e)显示并评价分析结果
第八章 控制系统的状态空间分析 一、状态空间的基本概念 1. 状态 反应系统运行状况,并可用一个确定系统未来行为的信息集合。 2. 状态变量 确定系统状态的一组独立(数目最少的)变量,如果给定了0t t =时刻 这组变量的值())()() (00201t x t x t x n 和0t t ≥时输入的时间函数)(t u ,则系 统在0t t ≥任何时刻())()() (21t x t x t x n 的行为就可完全确定。 3. 状态向量 以状态变量为元素构成的向量,即[])()()()(21t x t x t x t x n =。 4. 状态空间 以状态变量())()() (21t x t x t x n 为坐标的n 维空间。系统在某时 刻的状态,可用状态空间上的点来表示。 5. 状态方程 描述状态变量,输入变量之间关系的一阶微分方程组。 6. 输出方程 描述输出变量与状态变量、输入变量间函数关系的代数方程。 二、状态空间描述(状态空间表达式) 1. 状态方程与输出方程合起来称为状态空间描述或状态空间表达式,线性定常系统状 态空间描述一般用矩阵形式表示,对于线性定常连续系统有 ? ? ?+=+=)()()()()()(t Du t Cx t y t Bu t Ax t x (8-1) 对于线性定常离散系统有 ?? ?+=+=+) ()()() ()()1(k Du k Cx k y k Hu k Gx k x (8-2) 2. 状态空间描述的建立:系统的状态空间描述可以由系统的微分方程,结构图(方框 图),状态变量图、传递函数或脉冲传递函数(Z 传递函数)等其它形式的数学模型导出。 3. 状态空间描述的线性变换及规范化(标准型) 系统状态变量的选择不是唯一的,状态变量选择不同,状态空间描述也不一样。利用线性变换可将系统的矩阵A (见式8-1)规范化为四种标准型:能控标准型、能观标准型、对角标准型、约当标准型。