自动化专业英语第三版
1.1 介绍过程控制
1.近年来,对过程系统的性能改善需求变得越来越困难. 更为激烈的竞争,更加严格的环境和安全规范,以及快速变化的经济条件都是加强工厂产品质量规范的关键因素
2.更为复杂的情况是,由于现代制造业朝着规模更大,集成度更高的方向发展,而使不同的加工环节之间的协调能力更低, 所以加工过程更难控制.
在这种工厂中,要想让一个生产环节出现的问题不对其相连的另一个生产环节产生影响,几乎是不可能的.
3.近年来,考虑到工业制造逐渐加强的安全、高效需求,过程控制这个课题变得越来越受重视.
实际上,对于大多数现代工业,要满足安全、高效,产品质量的要求,没有控制系统是不可能的.
1.1.1说明性的例子
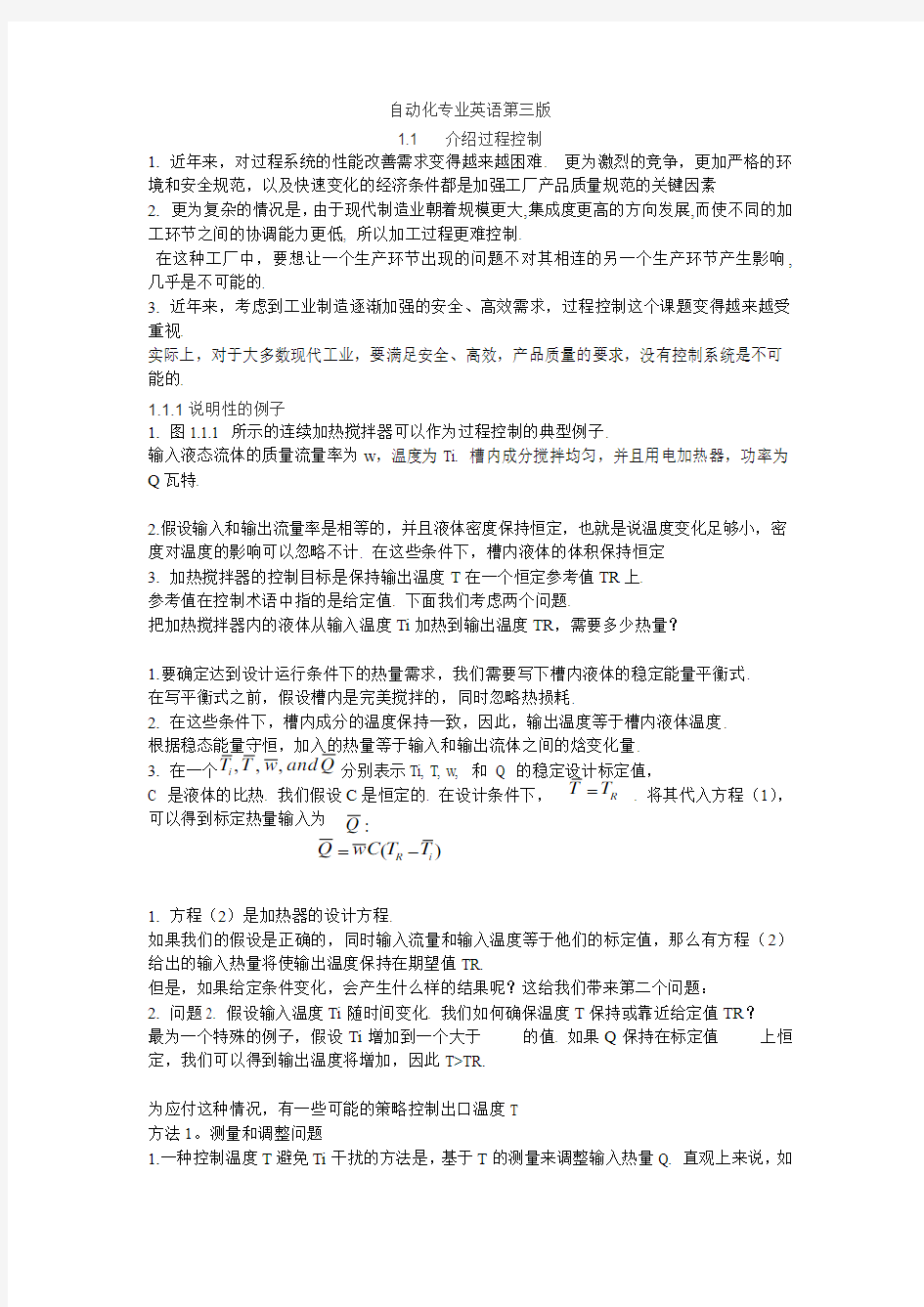
1.图1.1.1 所示的连续加热搅拌器可以作为过程控制的典型例子.
输入液态流体的质量流量率为w,温度为Ti. 槽内成分搅拌均匀,并且用电加热器,功率为Q瓦特.
2.假设输入和输出流量率是相等的,并且液体密度保持恒定,也就是说温度变化足够小,密度对温度的影响可以忽略不计. 在这些条件下,槽内液体的体积保持恒定
3.加热搅拌器的控制目标是保持输出温度T在一个恒定参考值TR上.
参考值在控制术语中指的是给定值. 下面我们考虑两个问题.
把加热搅拌器内的液体从输入温度Ti加热到输出温度TR,需要多少热量?
1.要确定达到设计运行条件下的热量需求,我们需要写下槽内液体的稳定能量平衡式.
在写平衡式之前,假设槽内是完美搅拌的,同时忽略热损耗.
2.在这些条件下,槽内成分的温度保持一致,因此,输出温度等于槽内液体温度.
.
3.Ti, T, w, 和Q
C 是液体的比热. 我们假设C是恒定的. 在设计条件下,
. 将其代入方程(1),
1.方程(2)是加热器的设计方程.
如果我们的假设是正确的,同时输入流量和输入温度等于他们的标定值,那么有方程(2)给出的输入热量将使输出温度保持在期望值TR.
但是,如果给定条件变化,会产生什么样的结果呢?这给我们带来第二个问题:
2.问题2. 假设输入温度Ti随时间变化. 我们如何确保温度T保持或靠近给定值TR?
最为一个特殊的例子,假设Ti增加到一个大于的值. 如果Q保持在标定值上恒定,我们可以得到输出温度将增加,因此T>TR.
为应付这种情况,有一些可能的策略控制出口温度T
方法1。测量和调整问题
1.一种控制温度T避免Ti干扰的方法是,基于T的测量来调整输入热量Q. 直观上来说,如
果温度太高,我们应该减少输入热量;如果温度太低,我们可以增加输入热量. 这种控制策略将使温度趋向于温度给定值TR,并且可以用几种不同的方法来实现.
2.例如,工厂操作员可以观察测量温度,将测量值与TR进行比较.
然后操作员将用恰当的方式改变输入热量Q. 这是手动控制的应用.
然而,用一个电子设备来代替人来控制,是更为简单和经济的,这就是使用自动控制
方法2。测量Ti,调整Q。
作为一个替代方法,我们可以方法1,Ti和Q相应调整为干扰变数。
因此,如果Ti比_Ti大,我们可以减少Q;Ti<_Ti,我们可以设置Q>_Q
方法3。测量T,调整w
与调整输入热量Q类似,我们可以选择操作质量流量w. 因此,如果温度太高,我们将增加流量w,使得搅拌槽的能量输入速率相对于质量流量减少,因此使输出温度得以降低.
方法4。测量Ti,调整 w
和方法3类似,如果Ti太高了,我们应该增加。
方法5。测量Ti,调整 Q
该方法结合方法1和2。
方法6。测量Ti和T,调整w
该方法结合方法3和4。
方法7. 在输入流安置一个热交换器. 热交换器意图减少Ti的干扰,因此可以减少温度T的扰动. 这个方法有时又叫做输入束缚法.
方法8. 1.使用一个更大的槽. 如果使用更大的槽,因为更大的热容,Ti的波动会趋向于衰减. 然而,体积增加使得开支增加,会使工厂系统的解决方案变得更加昂贵.
2.要指出的是这个方法类似于化学实验室中水缸的使用,水缸大的热容量可以看作散热装置,因此可以为小型实验仪器提供一个恒温环境.
1.1.2 分类控制策略
1.接下来,我们将给这8种控制方法进行分类,同时讨论他们各自的优缺点. 方法1和3 是反馈控制的例子. 在反馈控制中,测量被控过程变量,该测量值用于调整另一个可以操做的过程变量. (即测量变量,操作变量,测量变量用于调整操作变量.)
2.因此,对于方法1来说,测量变量是T,操作变量是Q. 对于方法3,测量变量仍旧是T,但是操作变量则是w. 需要注意的是,在反馈控制中,扰动变量Ti没有被测量.
1.区分负反馈和正反馈很重要. 负反馈是指期望达到的形势,控制器的校正作用使得被控变量趋于给定值.
2.相反地,当正反馈存在时,控制器使局面变得更加糟糕,它使被控变量远离给定值. 因此,对于加热搅拌器来说,如果T太高,我们将减少输入Q(负反馈),而不是增加输入热量Q(正反馈).
1.方法2和4都是前馈控制策略. 这里,扰动变量Ti是被测量的,并且用于操作输入热量Q或输入流量w. 注意的是,在前馈控制中,被控变量T是没有被测量的.
2.方法5是前馈-反馈控制策略,因为它是方法1和2的综合. 同样地,方法6也是前馈-
反馈控制策略,因为它是方法3和4的综合
3.方法7和8包含了设备的设计变化,因此并不是真正的控制策略. 注意方法7有点不合适,因为它涉及到在加热搅拌器的入口通道中添加一个热交换器,而加热搅拌器本身的设计功能就是个热交换器. 加热搅拌器的控制策略在表格1.1.1中做了总结.
1.到目前为止,我们仅仅考虑了Ti波动这一种干扰源. 我们也应该考虑其他过程变量干扰的可能性,如会影响槽中散热量的环境温度.
2.回忆一下前面我们假定热损失是可忽略的. 过程设备的变化是另一个可能的干扰源. 例如,加热器的特性会因为液体结垢而随时间变化. 考察这些不同类型的干扰对前馈和反馈控制策略的影响是有益的
1.首先,考虑方法2中的前馈控制方法,在这种方法中测量的是干扰Ti,并且测量用于调整可操作量Q. 从理论上讲,尽管存在干扰Ti, 这种控制方案有能力保持被控变量精确在给定值TR
2.在理想情况下,如果对Ti的精确的测量是可能的,并且以一种合适的方法对Q进行调整,那么加热器的校正作用将在T被影响以前就抵消干扰的影响. 如此而言,从维持被控变量在给定值的意义上讲,前馈控制原则上能够提供完美(无差,没有误差)的控制.
1.但是如果干扰源来自其他过程变量,这种前馈控制的策略如何发挥作用呢?特别地,假如流量w不能维持恒定,而是随时间变化. 在这种情况下,w被看作是一个扰动变量.
2.如果w增加,出口温度T将减少,除非加热器提供更多的热量. 然而,在方法2的控制策略中,只要Ti不变,热量输入值Q就维持恒定. 因此,对没有测量的流量扰动就不会采取校正动作.
3.原则上说,处理这种情况,我们可以同时测量Ti和w,然后调整Q来同时补偿这两种扰动. 然而,从实际出发,试图测量所有潜在的干扰一般来说是昂贵的. 既然反馈控制可以对未知的干扰提供校正动作,采用前馈和反馈组合的控制策略将更加实际,正如我们下面将要讨论的那样.
4.因此在工业应用中,前馈控制一般是和反馈控制结合使用的.
1.下面我们考虑扰动Ti或w出现的情况下,方法1的反馈控制如何实行. 如果采用方法1, 校正动作只有在干扰已经影响了过程之后发生,也就是说, 直到T偏离了TR之后.
2.既然在校正动作产生前,被控量必须偏离给定值,所以就其本身的固有属性而言,反馈控制不是完美(无差)控制. 然而,反馈控制的一个极其重要的优点是, 不论对什么样的扰动, 都可以产生正确的校正动作.
3.因此,在方法1中, 当扰动Ti 或w 引起T偏离给定值后, 校正动作都会产生(通过调整Q). 这种处理未知起因、没有测量的扰动的能力是反馈控制在过程控制中应用如此之广的主要原因.
PART 3 Computer Control Technology UNIT 1 A 计算机的结构与功能 这一节介绍计算机的内部体系结构,描述了指令如何存储和译码,并解释了指令执行周期怎样分解成不同的部分。 从最基本的水平来讲,计算机简单执行存储在存储器中的二进制编码指令。这些指令按照二进制编码数据来产生二进制编码结果。对于通用可编程计算机,四个必要部件是存储器、中央处理单元(CPU,或简称处理器),外部处理器总线,输入/输出系统,正如图 3-1A-1所示。 外部处理器总线 存储器CPU输入/输出 图 3-1A-1 计算机的基本元件 存储器储存指令和数据。 CPU读取和解释指令,读每条指令所需的数据,执行指令所需的操作,将结果存回存储器。CPU所需的操作之一是从外部设备读取或写入数据。这利用输入/输出系统来实现。 外部处理器总线是一套能在其他计算机部件之间传送数据、地址和控制信息的电导线。 存储器 计算机的存储器是由一套连续编号的单元所组成。每个存储单元是一个能存二进制信息的寄存器。单元的编号称为地址。初始地址为0。制造商定义处理器的一个字长为单元的整数长。在每个字中,各位表示数据或指令。对于英特尔8086/87和摩托罗拉MC68000微处理器来说,一个字是16位长,但每个存储单元仅为8位,因此两个8位单元来存取获得一个数据字长。
为了使用存储器中的内容,处理器必须取来右边的内容。为了完成这一次读取,处理器把所需单元的二进制编码地址放到外部处理器地址总线的地址线上,然后,存储器允许处理器读取所寻址的存储单元的内容。读取存储单元的内容的这一过程并不改变该单元的内容。 存储器中的指令存储器中的指令由CPU取来。除非发生程序转移,它们按在存储器中出现的顺序来执行。用二进制形式所写的指令叫做机器语言指令。一种得到(指令)有效形式的方法是将(这些)位分成段,如图3-1A-2所示。每一段都包含一个不同类型信息的代码。 在简单的计算机中,每条指令可分为四段,每段有四位。每条指令包括操作代码(或操作码,每条指令有唯一的操作码)、操作数地址、立即数、转换地址。 在一个实际的指令集中,有很多指令。也有大量的存储单元来存储指令和数据。为了增加存储单元的数目,如果我们使用同样的方法,地址段的指令一定长于16位。除了增加指令长度外,还有很多增加微处理器寻址范围的方法:可变指令段、多字指令、多寻址模式,可变指令长度。我们不将详细讨论它们。 存储数据数据是存储器中代表代码的信息。为了有效利用存储空间和处理时间,大多数计算机提供了不同长度和表示方法的处理数据能力。能被处理器识别的各种不同表示称作数据类型。常用的数据类型有:位、二进制码、十进制数字(4位字节,BCD)、字节(8位)、字(2个字节)、双字(4个字节)。 有一些处理器提供了可处理其他数据类型。例如单精度浮点数据类(32位)和双精度浮点数据(64位)等的指令。还有另一类的数据–––特征数据。通常也表示为8位。在标准键盘上,每个计算机终端键和键的组合(例如shift和control功能键)有定为美国信息交换标准码的7位码。 存储器类型在数字控制系统的应用中,我们也关注不同存储技术的特征。对主存储器来说,我们需用它临时存储信息,并逐次地从不同单元写入或获得信息。这种类型的存储器称作随机访问存储器(RAM)。在某些情况下,我们不想让存储器中的信息丢失。因此我们愿使用特殊技术写入存储器。如果写入只在物理改变连接时才能实现,那么这种存储器称为只读存储器(ROM)。如果相互连接的模式可由程序设定,那存储器叫做可编程只读存储器(PROM)。如果需要实现改写的情况,我们有可擦的可编程只读存储器(EPROM)。电可擦除的PROM缩写为EEPROM。
中国教育在线考研频道提供考研全方面信息指导及咨询服务,为您成功考研提供一切帮助。 哲学Philosophy 马克思主义哲学Philosophy of Marxism 中国哲学Chinese Philosophy 外国哲学Foreign Philosophies 逻辑学Logic 伦理学Ethics 美学Aesthetics 宗教学Science of Religion 科学技术哲学Philosophy of Science and Technology 经济学Economics 理论经济学Theoretical Economics 政治经济学Political Economy 经济思想史History of Economic Thought 经济史History of Economic 西方经济学Western Economics 世界经济World Economics 人口、资源与环境经济学Population, Resources and Environmental Economics 应用经济学Applied Economics 国民经济学National Economics 区域经济学Regional Economics 财政学(含税收学)Public Finance (including Taxation) 金融学(含保险学)Finance (including Insurance) 产业经济学Industrial Economics 国际贸易学International Trade 劳动经济学Labor Economics 统计学Statistics 数量经济学Quantitative Economics 中文学科、专业名称英文学科、专业名称 国防经济学National Defense Economics 法学Law 法学Science of Law 法学理论Jurisprudence 法律史Legal History 宪法学与行政法学Constitutional Law and Administrative Law 刑法学Criminal Jurisprudence
UNIT 1 A 电路 电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。如果网络不包含能源,如 电池或发电机,那么就被称作无源网络。换句话说,如果存在一个或多个能源,那么组合的结果为有源网络。在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流。因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性. 就电阻来说,电压-电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。在数学上表达为: u=iR (1-1A-1)式中 u=电压,伏特;i =电流,安培;R = 电阻,欧姆。 纯电感电压由法拉第定律定义,法拉第定律指出:电感两端的电压正比于流过电感的电流随时间的 变化率。因此可得到:U=Ldi/dt 式中 di/dt = 电流变化率,安培/秒; L = 感应系数,享利。 电容两端建立的电压正比于电容两极板上积累的电荷q 。因为电荷的积累可表示为电荷增量dq的和或积分,因此得到的等式为 u= ,式中电容量C是与电压和电荷相关的比例常数。由定义可知,电流等于电荷随时间的变化率,可表示为i = dq/dt。因此电荷增量dq 等于电流乘以相应的时间增量,或dq = i dt,那么等式 (1-1A-3) 可写为式中 C = 电容量,法拉。 归纳式(1-1A-1)、(1-1A-2) 和 (1-1A-4)描述的三种无源电路元件如图1-1A-1所示。注意,图中电流的参考方向为惯用的参考方向,因此流过每一个元件的电流与电压降的方向一致。 有源电气元件涉及将其它能量转换为电能,例如,电池中的电能来自其储存的化学能,发电机的电能是旋转电枢机械能转换的结果。 有源电气元件存在两种基本形式:电压源和电流源。其理想状态为:电压源两端的电压恒定,与从 电压源中流出的电流无关。因为负载变化时电压基本恒定,所以上述电池和发电机被认为是电压源。另一方面,电流源产生电流,电流的大小与电源连接的负载无关。虽然电流源在实际中不常见,但其概念的确在表示借助于等值电路的放大器件,比如晶体管中具有广泛应用。电压源和电流源的符号表示如图1-1A-2所示。 分析电网络的一般方法是网孔分析法或回路分析法。应用于此方法的基本定律是基尔霍夫第一定律,基尔霍夫第一定律指出:一个闭合回路中的电压代数和为0,换句话说,任一闭合回路中的电压升等于电压降。网孔分析指的是:假设有一个电流——即所谓的回路电流——流过电路中的每一个回路,求每一个回路电压降的代数和,并令其为零。 考虑图1-1A-3a 所示的电路,其由串联到电压源上的电感和电阻组成,假设回路电流i ,那么回路总的电压降为因为在假定的电流方向上,输入电压代表电压升的方向,所以输电压在(1-1A-5)式中为负。因为电流方向是电压下降的方向,所以每一个无源元件的压降为正。利用电阻和电感压降公式,可得等式(1-1A-6)是电路电流的微分方程式。 或许在电路中,人们感兴趣的变量是电感电压而不是电感电流。正如图1-1A-1指出的用积分代替式(1-1A-6)中的i,可得1-1A-7 UNIT 3 A 逻辑变量与触发器
Lesson 1 力学的基本概念 1、词汇: statics [st?tiks] 静力学;dynamics动力学;constraint约束;magnetic [m?ɡ'netik]有磁性的;external [eks't?:nl] 外面的, 外部的;meshing啮合;follower从动件;magnitude ['m?ɡnitju:d] 大小;intensity强度,应力;non-coincident [k?u'insid?nt]不重合;parallel ['p?r?lel]平行;intuitive 直观的;substance物质;proportional [pr?'p?:??n?l]比例的;resist抵抗,对抗;celestial [si'lestj?l]天空的;product乘积;particle质点;elastic [i'l?stik]弹性;deformed变形的;strain拉力;uniform全都相同的;velocity[vi'l?siti]速度;scalar['skeil?]标量;vector['vekt?]矢量;displacement代替;momentum [m?u'ment?m]动量; 2、词组 make up of由……组成;if not要不,不然;even through即使,纵然; Lesson 2 力和力的作用效果 1、词汇: machine 机器;mechanism机构;movable活动的;given 规定的,给定的,已知的;perform执行;application 施用;produce引起,导致;stress压力;applied施加的;individual单独的;muscular ['m?skjul?]]力臂;gravity[ɡr?vti]重力;stretch伸展,拉紧,延伸;tensile[tensail]拉力;tension张力,拉力;squeeze挤;compressive 有压力的,压缩的;torsional扭转的;torque转矩;twist扭,转动;molecule [m likju:l]分子的;slide滑动; 滑行;slip滑,溜;one another 互相;shear剪切;independently独立地,自立地;beam梁;compress压;revolve (使)旋转;exert [iɡ'z?:t]用力,尽力,运用,发挥,施加;principle原则, 原理,准则,规范;spin使…旋转;screw螺丝钉;thread螺纹; 2、词组 a number of 许多;deal with 涉及,处理;result from由什么引起;prevent from阻止,防止;tends to 朝某个方向;in combination结合;fly apart飞散; 3、译文: 任何机器或机构的研究表明每一种机构都是由许多可动的零件组成。这些零件从规定的运动转变到期望的运动。另一方面,这些机器完成工作。当由施力引起的运动时,机器就开始工作了。所以,力和机器的研究涉及在一个物体上的力和力的作用效果。 力是推力或者拉力。力的作用效果要么是改变物体的形状或者运动,要么阻止其他的力发生改变。每一种
第1章工业过程控制原理 近年来,工艺装置的性能要求已变得越来越难以满足。更激烈的竞争,更加严格的环保和安全法规和瞬息万变的经济环境已经在收紧厂的产品质量标准的关键因素。更复杂的是,现代化的进程变得更加难以操作,因为更大,更高度集成的植物更小的浪涌能力之间的各种处理单元的趋势。这些植物给运营商很少有机会能防止翻倒从一台设备传输到其他互联单位。鉴于放置在安全的越来越重视。高效的工厂运营,这是很自然的主题,过程控制,在最近几年变得越来越重要。事实上,在没有过程控制中,就成了不能够操作最现代化过程安全,有益,同时满足植物的质量标准。 1.1.1举例说明 作为一个引进的过程控制。考虑在图所示的连续搅拌槽加热器。1。1。1的进气口的液体流具有的质量流量w和温度T。搅拌罐内容,并提供问答瓦的电加热器加热。据推测,在入口和出口的流率是相同的,液体密度p保持恒定的,即是在温度变化足够小,可以忽略不计的温度依赖性的p。在这些条件下,液体在槽中的体积V保持恒定。 搅拌罐的加热器的控制目标是保持的出口温度T在 恒定的参考值TR。的基准值被称为对照术语作为设定点。接下来,我们考虑两个问题。 问题1。多少热量必须被供给到搅拌槽加热器加热的液体从入口温度T,的出口温度TR? 要确定所需的热量输入,为设计工况条件下,我们需要写一个稳态能量平衡的液体在槽中。在写这种平衡,它假定罐被完全混合,听到的损失是可以忽略不计。在这些条件下有 制作人:中国石油大学(华东)信控学院xueyue 内的排名的内容是没有温度梯度,因此,出口温度是罐中的液体的温度相等。甲稳态能量平衡罐表明添加的热等于焓变化之间 在入口和出口流: Q = WC(T-Ti)的(1) 其中,Ti的Tw和Q表示体的Tw和Q的额定稳态设计值。和C是比热的液体。我们假设,C为常数。在设计条件下,T = TR(设定点)。这种替代式。(1)给出的表达式{或标称输入热量 Q = WC(TR-T)(2) 方程(2)是对听者的设计方程。如果我们的假设是正确的,如果在入口流率和入口温度等于其nomin81值,然后由方程给出的热输入。(2)的出口温度保持在所需的值,TR。但是,如果条件发生变化吗?这给我们带来了第二个问题: Quesrion2。假设入口温度Ti随时间的变化。我们怎样才能保证T保持在设定点附近TR吗? 作为一个具体的例子。承担的Ti提高到一个新的值大于钛,如果Q是保持不变的人的名义Q值,我们知道,出口温度将增加,使T> TR。(cf.Eq.(1))。 为了对付这种情况,也有一些可能的策略用于控制退出 温度T。 方法。测量T和调Q。的一种方式控制T,尽管这件T干扰。调Q根据T.直观地测量,如果T是太高,我们应该减少Q; T是太低了,我们应加大控制策略往往会问:这移动?朝向的设定点(TR)和可以在许多不同的方式实施。例如,工厂操作员可以观察测得的温度,并比较测量值到TR。然后,操作员会以适当的方式变化q。这将是一个手动控制的应用。但是,它可能会更方便,更经济,有这个简单的控制任务的电子设备,而不是一个人,那就是,利用自动控制自动执行。 方法2。测量钛调整问:作为另一种合作方式l。我们可以测量变量T和相应的调Q。因此,如果Ti 大于钛,我们将减少Q;为钛
专业英语翻译1
Basic Chemistry 1. Atomic Structure Matter has mass and takes up space. Atoms are basic building blocks of matter, and cannot be chemically subdivided by ordinary means. Both the protons and neutrons reside in the nucleus. Protons have a positive (+) charge, neutrons have no charge --they are neutral. Electrons reside in orbitals around the nucleus. They have a negative charge (-). It is the number of protons that determines the atomic number. The number of protons in an element is constant but neutron number may vary, so mass number (protons + neutrons) may vary. 1。原子结构 物质有质量,占空间。原子是物质的基本组成物,不能用普通的方法进行化学细分。 质子和中子都驻留在原子核中。质子有一个正电荷,中子是不带电的,它们是中性的。电子在原子核周围的轨道上。他们有一个负电荷(-)。 它是确定原子序数的质子数。在一个元素中的质子的数量是恒定的,但中子数可能会有所不同,所以质量数(质子+中子)可能会有所不同。 The same element may contain varying numbers of neutrons; these forms of an element are called isotopes. The chemical properties of isotopes are the same, although the physical properties of some isotopes may be different. Some isotopes are radioactive-meaning they "radiate" energy as they decay to a more stable form, perhaps another element half-life: time required for half of the atoms of an element to decay into stable form. Another example is oxygen, with atomic number of 8 can have 8, 9, or 10 neutrons. 相同的元素可能含有不同数量的中子,这些元素
外文翻译 英文原文 Belt Conveying Systems Development of driving system Among the methods of material conveying employed,belt conveyors play a very important part in the reliable carrying of material over long distances at competitive cost.Conveyor systems have become larger and more complex and drive systems have also been going through a process of evolution and will continue to do so.Nowadays,bigger belts require more power and have brought the need for larger individual drives as well as multiple drives such as 3 drives of 750 kW for one belt(this is the case for the conveyor drives in Chengzhuang Mine).The ability to control drive acceleration torque is critical to belt conveyors’performance.An efficient drive system should be able to provide smooth,soft starts while maintaining belt tensions within the specified safe limits.For load sharing on multiple drives.torque and speed control are also important considerations in the drive system’s design. Due to the advances in conveyor drive control technology,at present many more reliable.Cost-effective and performance-driven conveyor drive systems covering a wide range of power are available for customers’ choices[1]. 1 Analysis on conveyor drive technologies 1.1 Direct drives Full-voltage starters.With a full-voltage starter design,the conveyor head shaft is direct-coupled to the motor through the gear drive.Direct full-voltage starters are adequate for relatively low-power, simple-profile conveyors.With direct fu11-voltage starters.no control is provided for various conveyor loads and.depending on the ratio between fu11-and no-1oad power requirements,empty starting times can be three or four times faster than full load.The maintenance-free starting system is simple,low-cost and very reliable.However, they cannot control starting torque and maximum stall torque;therefore.they are
Part Ⅴ Sensors and Transmitters In a feedback control system, the elements of a process-control systemare defined interms of separate functional parts of the system . The four basic components of controlsystems are thesensors, transmitter , controller , and final control elements . Thesecomponents per form the three basic operations of every control system: measurementdecision, and action. Sensors and transmitters perform the measurements operation of control system. Thesensor produces a phenomenon, mechanical, or the like related to the process variable that itmeasures. The function of transmitter in turn is to convert the signal from sensor to the formrequired by the final control device. The signal, therefor e, is related to the process variable. Two analog standards are in common u se as a means of representing the range ofvariables in control systems. For electrical systems we use a range of electric current carriedin wires , and for pneumatic systems we use a range of gas pressure carried in pipes . Thesesignals are used primarily to transmitvariable information over some distance, such as to andfrom the control room and the plant .Fig .5 . 9 shows a diagram of a process- controlinstallation where current is used to transmit measurement data about the controlled variableto the control room, and gas pressure in pipes is used to transmit a feedback signal to a valve to change flow as the controlling variable . Fig .5 .9 Electrical current and pneumatic pressures are the most common means of information transmitter in the industrial environment Current signal The most common current transmission signal is 4 to 20 mA . Thu s , in the preceding temperature example, 20℃might be represented by 4 mA, and 120℃by 20 mA, with all temperatures in between represented by a proportional current . The gain is 略 That is , we can say that the gain of sensor/ transmitter is ratio of the span of the output to the span of input . Current is used instead of voltage because the system is then les s dependent on load . Voltage is not used for transmission because of its susceptibility to changes of resistance in the line . Pneumatic signals The most common standard for pneumatic signal transmitter is 3 to 15 psi . In this case, when a sensor measures some variable in a range it is converted into a proportionalpressure of gas in a pipe . The gas is usually dry air .The pipe may be many hundreds of meters long , but as long as there is no leak in the system the pressure will be propagated down the pipe . This English system standard is still widely used in the U .S ., despite the move to the SI system of units . The equivalent SI range that will eventually be adopted is 20 to 100 kPa. The two cases presented show that the gain of the sensor/ transmitter is constant over its completeoperating range . For most sensor/ transmitter this is the case; however , there are some in stances , such as a differential pressure sensor used to measure flow, when this is not the case . A differential pressure sensor measures the differential pressure ,h, across an orifice . This differential pressure is related to the square of the volumetric flow rate F . That is F2 ah . The equation that describes the output signal form an electronicdifferential pressure transmitter when used to measure volumetric flow with a range of 0~F maxgpm is
电气自动化专业英语(翻译1-3) 第一部分:电子技术 第一章电子测量仪表 电子技术人员使用许多不同类型的测量仪器。一些工作需要精确测量面另一些工作只需粗略估计。有些仪器被使用仅仅是确定线路是否完整。最常用的测量测试仪表有:电压测试仪,电压表,欧姆表,连续性测试仪,兆欧表,瓦特表还有瓦特小时表。 所有测量电值的表基本上都是电流表。他们测量或是比较通过他们的电流值。这些仪表可以被校准并且设计了不同的量程,以便读出期望的数值。 1.1安全预防 仪表的正确连接对于使用者的安全预防和仪表的正确维护是非常重要的。仪表的结构和操作的基本知识能帮助使用者按安全工作程序来对他们正确连接和维护。许多仪表被设计的只能用于直流或只能用于交流,而其它的则可交替使用。注意:每种仪表只能用来测量符合设计要求的电流类型。如果用在不正确的电流类型中可能对仪表有危险并且可能对使用者引起伤害。 许多仪表被设计成只能测量很低的数值,还有些能测量非常大的数值。 警告:仪表不允许超过它的额定最大值。不允许被测的实际数值超过仪表最大允许值的要求再强调也不过分。超过最大值对指针有伤害,有害于正确校准,并且在某种情况下能引起仪表爆炸造成对作用者的伤害。许多仪表装备了过载保护。然而,通常情况下电流大于仪表设计的限定仍然是危险的。 1.3测量仪器的使用 电压表是设计来测量电路的电压或者通过元器件的压降。电压表必须与被测量的电路或元器件并联。 1.3.1压力检验计 交-直流电压检验计是一种相当粗糙但对电工来说很有用的仪器。这种仪器指示电压的近似值。更常见类型指示的电压值如下:AC,110,220,440,550V,DC,125,250,600V。许多这种仪器也指示直流电的极性。那就是说(i.e=that is)电路中的导体是阳性(正)的还是阴性(负)。 电压检验计通常用来检验公共电压,识别接地导体,检查被炸毁的保险丝,区分AC和DC。电压检验计很小很坚固,比一般的电压表容易携带和保存。图1。31。4描述了用电压检验计检查保险丝的用法。 为了确定电路或系统中的导体接地,把测试仪连接在导体和已建立的地之间。如果测试仪指示了一个
第一章:应力与应变 1.That branch of scientific analysis which motions, times and forces is called mechanics and is made up of two parts, statics and dynamics. 研究位移、时间和力运动乘力是科学分析法的一个分歧,被称作力学,力学由两大部分组成,静力学和动力学。 2.For example, if the force operating on a sleeve bearing becomes too high, it will squeeze out the oil film and cause metal-to-metal contact, overheating and rapid failure of the bearing. 例如:如果止推轴承上的作用力过大的话,会挤出油膜,引起金属和金属之间的相互接触,轴承将过热而迅速失效。 3.Our intuitive concept of force includes such ideas as place of application, direction, and magnitude, and these are called the characteristics of a force. 力的直观概念包括力的作用点、大小、方向,这些被称为力的三要素。 4.All bodies are either elastic or plastic and will be deformed if acted upon by forces. When the deformation of such bodies is small, they are frequently assumed to be rigid, i.e., incapable of deformation, in order to simplify the analysis. 所有的物体既可以是弹性的也可以是塑性的,如果受到力的作用就产生变形。当变形很小的时候它们被假设成刚体,也就是不产生变形。 5.The rigid-body assumption cannot be used in internal stresses and strains due to the applied forces to be analyzed. Thus we consider the
《自动化专业英语教程》-王宏文主编-全文翻译 PART 1Electrical and Electronic Engineering Basics UNIT 1A Electrical Networks ————————————3 B Three-phase Circuits UNIT 2A The Operational Amplifier ———————————5 B Transistors UNIT 3A Logical Variables and Flip-flop ——————————8 B Binary Number System UNIT 4A Power Semiconductor Devices ——————————11 B Power Electronic Converters UNIT 5A Types of DC Motors —————————————15 B Closed-loop Control of D C Drivers UNIT 6A AC Machines ———————————————19 B Induction Motor Drive UNIT 7A Electric Power System ————————————22 B Power System Automation PART 2Control Theory UNIT 1A The World of Control ————————————27 B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30 B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32 B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34 B Nonlinear Control System 37 UNIT 5 A Introduction to Modern Control Theory 38 B State Equations 40 UNIT 6 A Controllability, Observability, and Stability B Optimum Control Systems UNIT 7 A Conventional and Intelligent Control B Artificial Neural Network PART 3 Computer Control Technology UNIT 1 A Computer Structure and Function 42 B Fundamentals of Computer and Networks 43 UNIT 2 A Interfaces to External Signals and Devices 44 B The Applications of Computers 46 UNIT 3 A PLC Overview B PACs for Industrial Control, the Future of Control
1) Electricity can be measured in amount and quality. 电可以用数量和质量来度量。 2) Instrument transformers are installed on the high-voltage equipment. 互感器安装在高压设备上。 3) Electric power is generated in power generating stations or plants. 电能是在发电站或发电厂产生的。 4) The meters are calibrated and the scale is designed to read the value of the desired unit. 这些仪表可以被校准并且设计了不同的量程,以便读出期望的数值。 5)Electrical energy can be stored in two metal plates separated by an insulation medium. Such a device is called a capacitor, and its ability to store electrical energy is termed capacitance. It is measured in Farads. 电能可以储存在被一绝缘介质隔开的两块金属板中,这样的装置被称为电容器,它储存电能的能力就被称为电容。电容的测量单位是法拉。 1)The signal should be filtered before it is amplified. The signal should be filtered before being amplified. 放大信号前,应先对其进行滤波。 2)An object becomes hot. It is placed in the sun. Once being placed in the sun, an object becomes hot. 物体放置在太阳下会变热。 3)We must do various experiments before a new electronic product is designed. Before designing a new electronic product we must do various experiments. 在设计一个新的电子产品之前,我们必须做各种实验。 4)Changing resistance is a method for controlling the flow of the current. 改变电阻是控制电流的一种方法。 5)Conducting electricity means the flow of electrons through an object. 传导电流意味着电子在物体内的流动。 1)The power supply, which is shown in block-diagram in Fig.1, is a single-phase switch-mode inverter. The power supply shown in block-diagram in Fig.1 is a single-phase switch-mode inverter. 图1中用框图表示的电源是一个单相开关逆变器。 2)A three-phase circuit, as it was pointed out above, is merely a combination of three single-phase circuits. A three-phase circuit, as pointed out above, is merely a combination of three single-phase circuits. 正如上面所指出的那样,三相电路只不过是三个单相电路的组合。 3) The transistor, which is working with correctly polarities, can work as an amplifier. The transistor working with correctly polarities can work as an amplifier. 工作于正确电源极性下的晶体管,作用就像放大器。 1)The capacity of individual generators is larger and larger so that the increasing demand of electric power is satisfied. The capacity of individual generators is larger and larger to satisfy the increasing demand of electric power. 单台发电机的容量越来越大,目的就是满足不断增长的用电需求。 2) What does a fuse do? It protects a circuit. The function of a fuse is to protect a circuit. 保险的作用就是保护电路。