第10章船用雷达终端显示器
10.1 概述
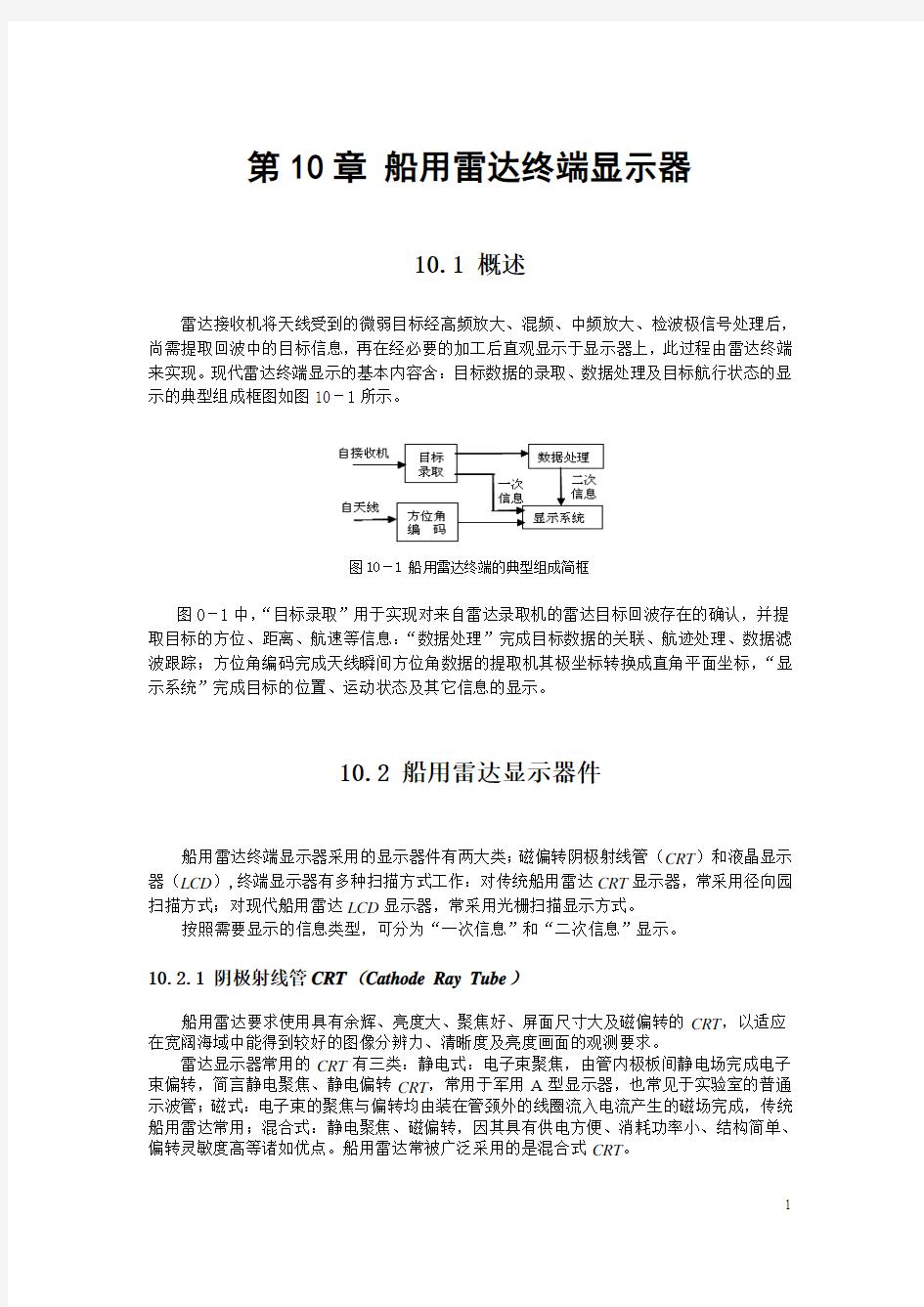
雷达接收机将天线受到的微弱目标经高频放大、混频、中频放大、检波极信号处理后,尚需提取回波中的目标信息,再在经必要的加工后直观显示于显示器上,此过程由雷达终端来实现。现代雷达终端显示的基本内容含:目标数据的录取、数据处理及目标航行状态的显示的典型组成框图如图10-1所示。
图10-1 船用雷达终端的典型组成简框
图0-1中,“目标录取”用于实现对来自雷达录取机的雷达目标回波存在的确认,并提取目标的方位、距离、航速等信息:“数据处理”完成目标数据的关联、航迹处理、数据滤波跟踪;方位角编码完成天线瞬间方位角数据的提取机其极坐标转换成直角平面坐标,“显示系统”完成目标的位置、运动状态及其它信息的显示。
10.2 船用雷达显示器件
船用雷达终端显示器采用的显示器件有两大类;磁偏转阴极射线管﹙CRT﹚和液晶显示器﹙LCD﹚,终端显示器有多种扫描方式工作:对传统船用雷达CRT显示器,常采用径向园扫描方式;对现代船用雷达LCD显示器,常采用光栅扫描显示方式。
按照需要显示的信息类型,可分为“一次信息”和“二次信息”显示。
10.2.1 阴极射线管CRT(Cathode Ray Tube)
船用雷达要求使用具有余辉、亮度大、聚焦好、屏面尺寸大及磁偏转的CRT,以适应在宽阔海域中能得到较好的图像分辨力、清晰度及亮度画面的观测要求。
雷达显示器常用的CRT有三类:静电式:电子束聚焦,由管内极板间静电场完成电子束偏转,简言静电聚焦、静电偏转CRT,常用于军用A型显示器,也常见于实验室的普通示波管;磁式:电子束的聚焦与偏转均由装在管颈外的线圈流入电流产生的磁场完成,传统船用雷达常用;混合式:静电聚焦、磁偏转,因其具有供电方便、消耗功率小、结构简单、偏转灵敏度高等诸如优点。船用雷达常被广泛采用的是混合式CRT。
1.CRT构成原理
1)单色混合式CRT
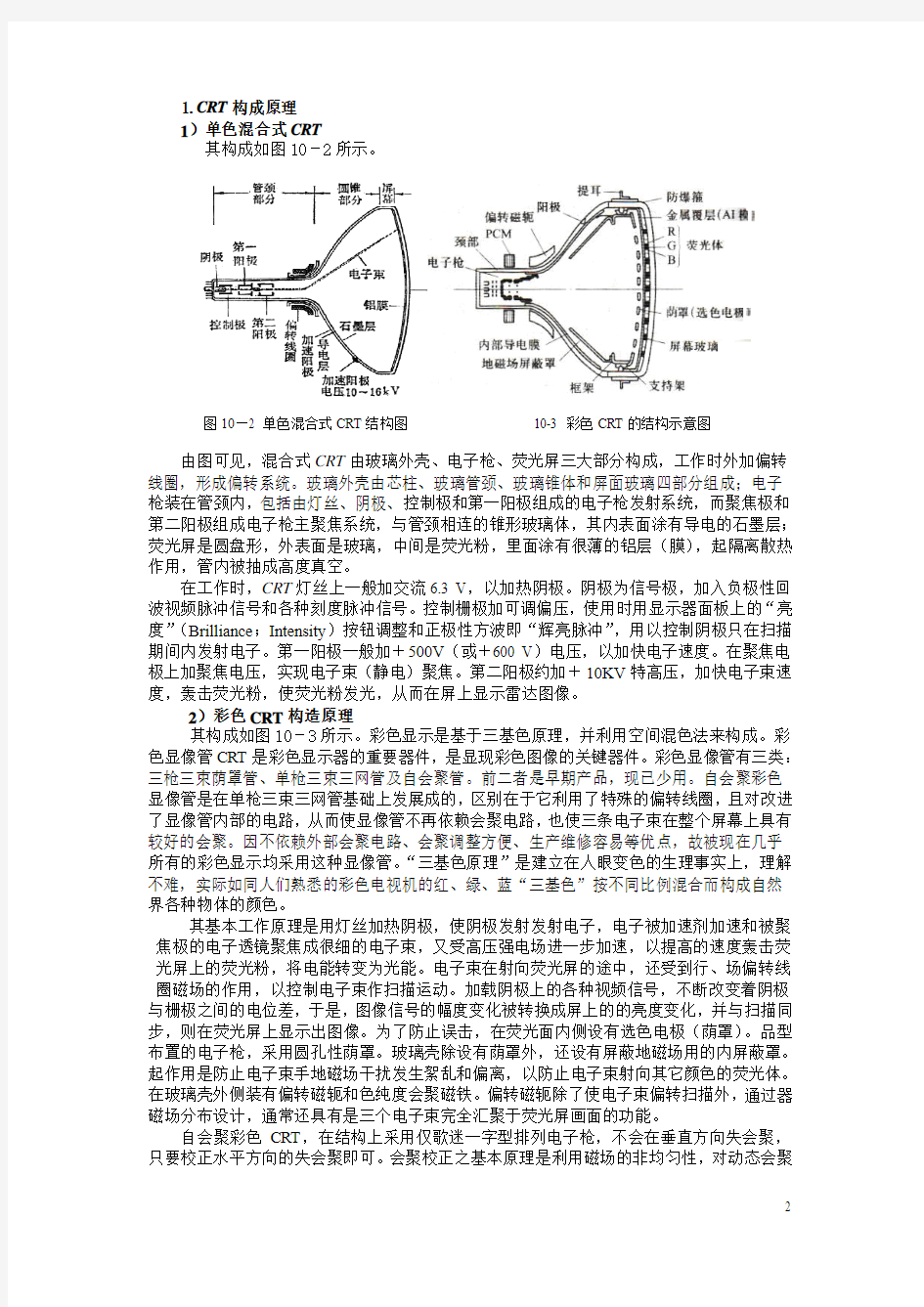
其构成如图10-2所示。
图10—2 单色混合式CRT结构图10-3 彩色CRT的结构示意图
由图可见,混合式CRT由玻璃外壳、电子枪、荧光屏三大部分构成,工作时外加偏转线圈,形成偏转系统。玻璃外壳由芯柱、玻璃管颈、玻璃锥体和屏面玻璃四部分组成;电子枪装在管颈内,包括由灯丝、阴极、控制极和第一阳极组成的电子枪发射系统,而聚焦极和第二阳极组成电子枪主聚焦系统,与管颈相连的锥形玻璃体,其内表面涂有导电的石墨层;荧光屏是圆盘形,外表面是玻璃,中间是荧光粉,里面涂有很薄的铝层(膜),起隔离散热作用,管内被抽成高度真空。
在工作时,CRT灯丝上一般加交流6.3 V,以加热阴极。阴极为信号极,加入负极性回波视频脉冲信号和各种刻度脉冲信号。控制栅极加可调偏压,使用时用显示器面板上的“亮度”(Brilliance;Intensity)按钮调整和正极性方波即“辉亮脉冲”,用以控制阴极只在扫描期间内发射电子。第一阳极一般加+500V(或+600 V)电压,以加快电子速度。在聚焦电极上加聚焦电压,实现电子束(静电)聚焦。第二阳极约加+10KV特高压,加快电子束速度,轰击荧光粉,使荧光粉发光,从而在屏上显示雷达图像。
2)彩色CRT构造原理
其构成如图10-3所示。彩色显示是基于三基色原理,并利用空间混色法来构成。彩色显像管CRT是彩色显示器的重要器件,是显现彩色图像的关键器件。彩色显像管有三类:三枪三束荫罩管、单枪三束三网管及自会聚管。前二者是早期产品,现已少用。自会聚彩色显像管是在单枪三束三网管基础上发展成的,区别在于它利用了特殊的偏转线圈,且对改进了显像管内部的电路,从而使显像管不再依赖会聚电路,也使三条电子束在整个屏幕上具有较好的会聚。因不依赖外部会聚电路、会聚调整方便、生产维修容易等优点,故被现在几乎所有的彩色显示均采用这种显像管。“三基色原理”是建立在人眼变色的生理事实上,理解不难,实际如同人们熟悉的彩色电视机的红、绿、蓝“三基色”按不同比例混合而构成自然界各种物体的颜色。
其基本工作原理是用灯丝加热阴极,使阴极发射发射电子,电子被加速剂加速和被聚焦极的电子透镜聚焦成很细的电子束,又受高压强电场进一步加速,以提高的速度轰击荧光屏上的荧光粉,将电能转变为光能。电子束在射向荧光屏的途中,还受到行、场偏转线圈磁场的作用,以控制电子束作扫描运动。加载阴极上的各种视频信号,不断改变着阴极与栅极之间的电位差,于是,图像信号的幅度变化被转换成屏上的的亮度变化,并与扫描同步,则在荧光屏上显示出图像。为了防止误击,在荧光面内侧设有选色电极(荫罩)。品型布置的电子枪,采用圆孔性荫罩。玻璃壳除设有荫罩外,还设有屏蔽地磁场用的内屏蔽罩。起作用是防止电子束手地磁场干扰发生絮乱和偏离,以防止电子束射向其它颜色的荧光体。在玻璃壳外侧装有偏转磁轭和色纯度会聚磁铁。偏转磁轭除了使电子束偏转扫描外,通过器磁场分布设计,通常还具有是三个电子束完全汇聚于荧光屏画面的功能。
自会聚彩色CRT,在结构上采用仅歌迷一字型排列电子枪,不会在垂直方向失会聚,只要校正水平方向的失会聚即可。会聚校正之基本原理是利用磁场的非均匀性,对动态会聚
误差自动校正。其中,垂直偏转线圈的磁场设计成桶形分布,水平偏转线圈的磁场设计成枕型分布。
2.CRT的调制特性
在船用雷达中,阴极电流的调制特性曲线如图10-4 所示,显见,调制特性曲线斜率越大,其调制作用越明显。
图10—4 CRT阴极电流调制及栅极控制特性
3.CRT电子束的聚焦原理
CRT电子束的聚焦目的是为了能使电子束轰击荧光粉时,只能限在很小的点上发光,以确保所要的清晰度,能使人眼容易分辨出直线和点,要求光点直径限制在0.18mm内。
电子束的聚焦可采用静电聚焦和磁聚焦,船用雷达亦即电视机及计算机均采用静电聚焦的CRT。聚焦的电子枪,由灯丝、阴极、控制极及一个到几个对电子加速的阳极组成,如图10-5 a)所示。
图10-5 CRT 静电聚焦过程示意图
a) 电极、不均匀电场及电子束形状;
b)“电子﹛光学﹜透镜”聚焦示意图
图中,G1和A2之间形成的电场构成“预聚焦透镜”,其作用是将阴极发射的电子进行初步聚焦,使其焦点正好落在轴线上,成第一焦点,视为电子发射点,再由A1和A2组成“主聚焦透镜”再进行主聚焦,使形成第二焦点与荧光屏面重合,如图10-5b)示。
采用三个金属圆筒组成的电子透镜,亦可完成电子束的聚焦作用,如图10-5 b)所示。阴极、控制删极和加速阳极A1之间有高-低-高的静电场,形成一个短焦距的第一电子透镜组,称预焦透镜,使电子束会聚与加速阳极A1的管轴上。在加速阳极A1和第二阳极之间,有较长的焦距,称主焦透镜,而构成CRT的聚焦系统,通过调整聚焦极的电压,可改变电子透镜的电场分布,从而改变焦距,达到更好的聚焦效果。
4.CRT电子束的偏转原理
如果上述电子束聚焦后沿管颈轴线飞向荧光屏过程中受到外力作用,电子束运动方向会发生怎样的改变?采用的是在管颈外套上偏转线圈,并加入电流,便形成垂直于轴向的磁场B,宽度为L1,磁偏转原理示意图如图图10—6 a)、b)所示。从偏转线圈中心位置到荧光屏屏面距离为L,电子束偏转角为 ,如图10—6a)所示,常用的半分布式空芯偏转线圈结构如图10—6b) 所示。
图10—6 磁偏转原理示意图
a) 磁偏转原理;
b) 半分布式空芯偏转线圈结构
经分析可简化得电子束在荧光屏上的偏移量D 为
1=0.3KL L D 式(10—1)
式中:W 为偏转线圈的匝数;I 为偏转线圈中流入的电流;K 为比例系数;L 为偏转线圈中心只平面的距离;a u 为CRT 第二阳极。
定义由单位安匝数产生的偏移量为“偏转灵敏度”h ,即
1D
W I 0.3KL L =h = 式(10—2)
h K = 式(10—3) 式中,1'0.3K KL =为由偏转线圈结构决定的系数。
5.荧光屏的余辉特性
图像﹙形﹚信息是经荧光屏上的可见光信号显示出的,故荧光屏的特性将直接影响显示画面的质量。荧光屏的各特性参数如下:
1)亮度特性:亮度是衡量光电发光亮暗程度的一个指标。亮度单位可用单位面积上发光强度来表示,常用“熙提”或“尼特”。在美英制中常用英尺·朗伯。它们之关系为 1熙提=1坎德拉/平方厘米﹙cd /cm 2﹚;1尼特=1坎德拉/平方米=102;1英尺·朗
伯=1/π坎德拉/英尺2=0.00043熙提。
荧光屏上光点的亮度,正比于屏接收到的电子束能量,或即正比于电子束的电流密度、加速极上的高压和电子束在荧光屏上的持续时间。
影响亮度特性的主要因素:⑴ 荧光质的能量转换效率;⑵ 发光亮度与电子束的能量和电子束本身的电流密度有关;⑶ 发光亮度与电子束的能量积累有关。
2)余辉特性:电子束在轰击荧光屏时将立即使荧光粉发光,电子束停止轰击后,光需要经过一段时间才能消失,此段时间称为余辉时间。工程上常将电子束停止停止轰击至亮度下降到初始值的10%所经历的时间定义为余辉时间。如表10–1所示。
3)闪烁效应:在CRT显示图像或数据时,由于其信息量很大,电子束在荧光屏上将不断重复扫描。当重复频率过低时,观测者看到的是一亮一暗的图像或数据,称其为闪烁效应。对船用雷达而言,需要显示的图像能够稳定,通常采用长余辉荧光屏的CRT,其临界闪烁频率较低。
过高的重复扫描频率,对整个系统工作频率要求过高,工程上也会产生一些困难。船用雷达实际使用的重复扫描频率为几百至几千Hz,不会出现闪烁现象。
4)光谱特性:不同荧光质在电子束轰击下发出不同颜色的光的现象,称为光谱特性。
10.2.2 液晶显示器LCD(Liquid Crystal Display)
1.LCD的构成原理及性能特点
1)概述
LCD是英文Liquid Crystal Display的缩写,即液晶显示器,后者目前彩色液晶屏LCD 已成为市场主流。船用雷达/ARPA均采用彩色薄膜晶体管液晶显示器﹙TFT-LCDThin Film Transistor—Liquid Crystal Display,本书此后简称为“LCD”﹚,亦即真彩色液晶显示屏,显示效果较好。
LCD使用于上世纪70年代初,开始作为一种显示媒体使用,应用范围被逐渐拓宽,而今,液晶显示器在船用雷达显示终端中的应用已趋普遍。上世纪80年代,欧美提出,掌握了STN-LCD(Super Twisted Nematic-LCD)的生产技术,STN屏幕,又称为超扭曲向列型液晶显示屏幕。在传统单色液晶显示器上加入彩色滤光片,并将单色显示矩阵中的每一像素分成三个像素,分别通过彩色滤光片显示红、绿、蓝三原色,以此达到显示彩色的作用,颜色以淡绿色为和橘色为主。STN—LCD功耗小,但在较暗的环境中清晰度较差。1997年代后期,日本建成了一大批大基板尺寸的第三代LCD生产线。此间,韩国和我国台湾开始介入液晶显示器生产领域,我国内地企业也引进S TN-LCD生产线,东亚地区逐渐发展成为世界液晶显示器的主要生产地。第三代半及第四代LCD生产线开始建立,日本,韩国和中国(含台湾省)在液晶显示器生产及技术上开始走在世界最前列。
2)液晶显示结构原理
LCD由两块玻璃板构成,厚约1mm,其间由包含液晶(LC)材料的5μm等距分隔。液晶如同闸门般被光线控制通断。通电时液晶排列有序而导通,断电时排列混乱而不导通。彩色LCD显示器的工作原理及实现彩色显示原理要点为,液晶是一种特殊的可极化的液态晶体,是一种有机化合物。在一定的温度范围内,它既具有液体的流动性,也具有晶体的某些光学特性。其透明度和颜色随电场、磁场、光、温度等外界条件的变化而变化。液晶在电场作用下会产生各种光电效应,在电场作用下,晶体内的分子排列会发生变化,其光学特性如透明度、反射率或颜色等所致改变。这样,若将液晶放在外光源的光路上,则其光阻便可随加于液晶上外加电场的变化而变化。液晶显示器件正是根据这一原理制成的。液晶单元器件的结构剖面和液晶显示板结构示意图分别如图图10-7a)、b)所示。
图10-7 液晶单元器件的结构剖面和液晶显示板结构示意图
a)液晶单元器件剖面略图;
b)液晶显示板结构示意图
由图10-7 a) 可见,它是由两片玻璃中间夹着液晶材料制成的。在玻璃上有透明电极,后者位于与液晶接触的玻璃面上。当加到透明电极上的电压产生的电场足够大时,液晶分子的排列就会改变,并导致液晶的光学传递特性发生变化。可见,可利用外加电场的变化来控制外光源透过液晶单元后输出的光强和颜色。由图10-7b)可见其结构有上、下两块玻璃基板。上基板用透明﹙如S n O2和I n2O2﹚制成许多条的水平电板;下基板用金属线或导电玻璃
-矩阵结构,即显示像线制成许多条状垂直电极,各水平与垂直电极相互正交,构成了x y
素单元的点阵。两基板间距为10~30 m,其间充以液晶,观察方向自上向下。
-极加电压,在每一单元内的液晶材料受电场在进行矩阵式选址时,只要在相应的x y
激励会改变光导特性,外界光照射时,单元光阻会发生变化,因而在显示板上呈现明暗不同的光点,用于显示所需的信息。基于上述LCD的结构以及显示信息的原理及其所具有的优点,尤其适应于平面矩阵型大屏幕显示的需求,不难理解为和LCD能被广泛应用的缘由。
有源矩阵的主要开光有三端器件和两端器件。三端开端器件主要开关器件主要使用半导体薄膜晶体管(TFT)。目前,在计算机显示器和雷达显示器中使用的主要是TFT-LCD,而STN-LCD主要用于手机显示。
液晶显示器件的功耗很低,为其突出优点,但其显示控制电路比较复杂,现采用专用集成电路与液晶显示器件配套,使用户应用十分方便。
LCD七段码中的一段字形的显示电路如图10-8所示。
图10-8 LCD七段码中的一段字形的显示电路
图中,A端接输人字形码,取“0”或“1",B端接周期性矩形脉冲信号。当A=1时,在异或门的输出端C则得到与B端同频反相的脉冲信号,将B和C端的信号加在LCD显示器的两端,则得到所需要的电压为脉冲信号两倍的方波信号,因而显示器显示字形;而当A =O时,异或门输出脉冲信号C与其输入信号B同频同相,从而使LCD显示器的两端电压为0,显示器呈白色而不显示字形。
电子束通过液晶层后发生强度变化,从而实现图像显示。
10.2.3 LCD液晶显示技术及其与CRT显示技术的比较
1. LCD显示的优势
⑴LCD具有辐射小、耗电省、空间占用少等优点;⑵LCD其主动矩阵的特点和
STN-LCD相比,具有响应时间快、无闪烁等特点;⑶LCD和STN-LCD相比,改善了STN (水波纹)-模糊的现象,提高了播放动态画面的能力;⑷LCD比STN-LCD有更出色的色彩饱和度、还原能力和更高的对比度;⑸LCD和CRT显示器相比,屏幕调节更方便可以通过"Auto"键自动调整。
2.CRT比TFT液晶显示的优点
⑴无像素损坏;⑵具有高质量的灰度系数﹙GAMMA﹚;⑶色纯度很好;⑷响应时间快25倍。LCD的显示与传统CRT的显示技术特性的比较如表10—1所示。
由表可见,LCD液晶显示比CRT显示具有以下优点:①每平米亮度大;②聚焦效果更好,能够提供更加清晰的文本显示;③平面度高,具有真正平面;④无几何失真显示;⑤颜
色可视度500~1700,范围与CRT显示同为1200,但TFT液晶显示从500开始,更适合观测者的视觉习惯;①信号输入:具有数字/模拟功能可选;②显示屏幕:无闪烁,避免注视屏幕时间长导致的视觉疲劳;③工作环境:无辐射;④电磁干扰:很小;⑤整机能耗:小1倍;
⑥整机占用空间:很小,更适用于桌面系统;⑦整机重量较轻。
而CRT显示比LCD液晶显示优越处:①可视角大:约达1500(,而LCD对比可视角范围仅600);②CRT显示分辨率:有一系列可选择,且按屏幕要求可调整,而LCD屏只含有固定数量的液晶单元,只能在全屏幕使用一种分辨率显示(每个单元即一个像素);③CRT 色彩显示:高质量,而L CD仍存在不足。此外,LCD价格昂贵,悬殊的价格差异,限制其更广泛的推广应用,随着技术进步,是可予解决的。
从总体看,LCD液晶显示技术要比CRT显示具有更多的优越性,其应用前景十分可观,此即CRT显示被TFT液晶显示淘汰的缘由。
3.液晶显示器的主要参数
液晶显示器的主要参数及分析如下:
⑴可视角度:对称性,左右达到,上下不定。一般上下角度小于或等于左右角度。可视角度过小是LCD的一大弊病。但很多新产品通过贴上补偿膜及提高配向分割次数,可视角度已接近160o。在需要场合还可以运用多屏无缝连接技术,实现360o全景显示。
⑵亮度与对比度:LCD背光光源亮度决定整台LCD画面亮度及色彩的饱和度,亮度越高越好,测量单位为cd.m-2(每公尺平方烛光),亦称流明﹙Nit﹚。通常,200Nits才能表现出比较好的画面。可接受亮度为150(cd.m-2)以上,目前国内基本在200(cd.m-2)左右。
⑶响应时间:响应时间反应了液晶显示器各像素点对输入信号的反应速度,此值愈小愈好。此值越小,运动画面才不会使用户有尾影拖拽的感觉。计算响应时间与所能播放最大帧数关系的公式为:F(帧数)=1秒/T(响应时间ms)。目前LCD在动态画面显示存在一个不小的
时延,因而导致出现拖影或者是跳帧的现象。
⑷色彩:目前LCD的色彩表现能力远逊于CRT。从理论而言,CRT可显示的色彩是无限的,而LCD产品大都宣称能够显示1677万色,但实际均采用通过FRC(Frame Rate Control)技术以仿真的方式来实现的,与真正的32位色相比相差甚远,因而在色彩的表现力和过渡方面仍然不及传统CRT。LCD灰度方面的能力亦然。
⑸分辨率:“分辨率”的概念源于CRT显示器。LCD采用像素来表示液晶显示器的图像分辨率,LCD在制作过程中就已经将像素固定了,故其“最佳分辨率”亦即“最大分辨率”。
目前LCD能支持标准分辨率外的分辨率,一旦所设定的分辨率小于真实分辨率时,将有两种显示方式:一是居中显示,只有LCD中间的像素会显示图象,其他未用到的点不会发光,画面似乎是居中缩小的;另一种是用的是类似插值算法进行扩展显示,但由于像素很容易发生扭曲,导致对显示效果产生一定影响。
⑹刷新率:传统所用的CRT电子束是从屏幕左上角第一行开始,从左至右逐行扫描,一直到扫到右下角,形成完整个屏幕,周而复始。于是,我们就不难理解,为何显示器的分辨率越高,其所能达到的刷新率最大值就越低。而在LCD中因每个像素都在持续不断地发光,因而其显示屏上不会有闪烁现象,无需刷新,不存在刷新率问题。
10.3径向园扫描平面位置显示器
径向园扫描含径向距离扫描和随天线旋转的园扫描,距离扫描起点时间与天线口开始发射的时间相同步,扫描长度代表所选用的量程距离。船用雷达采用的径向园扫描PPI的扫描方式的技术发展历史,先从动圈式PPI到定圈式PPI,而今发展到广泛采用的光栅扫描PPI。虽然扫描方式有多种,采用的显像管从阴极射线管CRT到液晶显示器LCD,但上述的径向园扫描特征在终端显示屏上均得以呈现。
10.3.1 动圈式PPI
动圈式PPI的方位是方位扫描是靠偏转线圈与天线同步旋转实现的,其优点是电路结构简单,因此得到广泛的应用。偏转线圈与天线同步旋转需要一套随动系统,且传动机构较复杂,精度也不够高,故在新型船用雷达中逐步被定圈式PPI所取代。
动圈式PPI主要由距离扫描、方位扫描、距离和方位刻度、回波视频及辉亮控制等四个部分构成。动圈式PPI组成框图如图10-9所示。
图10-9 动圈式PPI组成框图
1.扫描系统(Sweep System)简述
1)距离扫描系统(Range Sweep System)
距离扫描系统的任务是同步脉冲的控制下,在偏转线圈中周期性的流过线性良好的锯齿 形电流,以便形成随时间呈线性增长的偏转磁场,控制电子束在磁场中产生偏转(偏转方向与磁场方向垂直),在显示器上形成匀速径向扫描线。偏转线圈是距离扫描系统的负载。 ⑴系统组成框图和工作波形
图10-9的上部,可见典型距离扫描系统电路由方波、梯形电压波、锯齿电流个产生器 组成,在输入触发脉冲控制下,产生加到偏转线圈的锯齿电流,各部分主要波形如图所示。
由于偏转线圈随天线同步转动,故锯齿形电流要通过圆形滑环接入到偏转线圈。为改善扫描线性,常用多级反馈电路构成的举起电流放大器。锯齿电流产生器产生过程中的梯形电压产生器在梯形电压方波控制下产生梯形电压波,而梯形电压是在受同步脉冲控制的方波产生器输出的扫描方波控制。方波、梯波、锯齿波的重复周期T (即同步脉冲的T ),宽度称扫描持续期均以T 1表示。在T 1结束时,梯波、锯齿波均会出现后沿。本周期扫描至下周期扫描开始之间称间歇期或休止期T 2,显然T =T 1+T 2。在每周锯齿形扫描持续期T 1内,产生的锯齿波电流i 流入偏转线圈,后者产生的偏转磁场线性增长,使屏上光点从屏中心作径向线性移动,形成一条距离扫描线。在T 1后,电流减小,直至恢复到起始值。相应地,屏上光点从屏边缘移回屏中心原点,称回扫期。为了能在在回扫期不予辉亮,使屏上显示的图像清晰不乱,应使辉亮方波只出现在扫描持续期。图中画出的从同步脉冲控制起始的每一个波形及其标志起始时间的箭头。
⑵对锯齿电流的特征参数和要求
①锯齿电流波形
偏转线圈中的锯齿电流波形如图图10-10。
图10-10 锯齿电流波形 ② 锯齿电流参数
T 为扫描重复周期,1T
F =,由同步脉冲定;T 1 为扫描持续期(工作期);T 2为扫描休止期(间歇期),21T T T =-;'2T 为扫描恢复期;I m
为扫描电流最大幅度,决定扫描线长度。 距离扫描持续期T 1由所选量程R D 定:
在T 1内,锯齿形电流L i 是线性增长,即
式(10—4)
式中,K 为锯齿电流变化率,在量程R D 一定时,当i L 为线性增长时,K 应为常量,即
1m I T K const ==
⑶ 实际偏转线圈中电流和电压的关系
实际的偏转线圈难免存在损耗电阻R L 和分布电容C O ,其等效电路及波形分别如图10-11 ⑴、⑵所示。
图10-11 偏转线圈的等效电路
⑴等效电路;⑵波形图
图中,L为偏转线圈的电感,对船用雷达L约为几十μh;L R为偏转线圈固有损耗电阻,C为偏转线圈的分布电容。
仅零点几欧姆;o
为在偏转线圈中获得锯齿电流i L(t)=Kt,在偏转线圈两端应加的电压u应为跃升电压和锯齿电压组成,形成在偏转线圈上实际电压与电流。
用于雷达中扫描或辉亮方波的宽度由量程开关选择,如通过改变单稳态电路中的暂稳期,即扫描持续期T1≈0.7RC,不同量程所需的不同方波宽度可通过改变不同C得到不同T1,为此需要加一个可调电位器。不同量程的扫描方波、梯形波、锯齿波若干参数的变化均作相应的调整,在触发脉冲控制下,三个量程分别需要窄、中、宽不通宽度的方波、梯波及锯齿波;不同量程的梯波、锯齿波的速率不同,量程越小,速率越高;不同量程的梯波的起始台阶高度不同,量程越小,台阶越高。所有这些变换有操控面板上的量程控键控制。
2)方位扫描系统(Bearing Sweep System)
距离扫描线随天线同步旋转,称“方位扫描”,完成一次距离扫描时,实现方位扫描的装置称常称“方位扫描系统”。由于距离扫描周期T S比天线方位扫掠周期T A短得多,因而方位值基本不变,距离扫描线在显示屏幕上仍可视为一条径向的亮线。在动圈式PPI中,天线旋转信息通过隧洞系统控制偏转线圈的转动,从而实现荧光屏上的扫描线转角与天线转角同步。同时,通过同步脉冲控制调整同步的延时,实现显示器距离扫描开始时刻与天线口辐射电磁波时刻相同步。
1)方位扫描系统组成原理
⑴系统构成
动圈式PPI方位扫描系统的构成原理,如图10-12所示,这是普通船用雷达常用的具有伺服放大器式的随动系统。
图10-12 方位扫描系统构成原理图
图中:B1—方位同步发送机;B2—差动发送机;B3—方位同步接收机(接成同步变压器);
B 4— 罗经复示器;伺服放大器—角误差信号放大器;伺服电机或即执行电机。其中:B 1装在天线底座里,其它装在显示器内。R.B/T.B 为相对方位/真方位;S 1为罗经复示器控制开关;S 2为R.B/T.B 转换控制开关。
2)工作原理
⑴船首向上 相对方位扫描
图10-14中,罗经方位信号开关S 1开关断,处在R.B (或H.U )位置,相应的联动开关S 2位于“0FF ”。两开关状态如图中接法。雷达工作时,B 1转子通以中频交流电(也有接工频交流船电),随天线同步旋转。若天线转过角度为A θ?,B 1转子转A θ?,则在方位同步接收变压器B 3次级感应角误差信号电压为
max sin R R A U U q D =g 式(10—8)
式中:max R U 为对应于时的最大角误差信号电压;A t r θθθ?=-为同步变压器B 3转子(R 1-R 2)与同步发送机B 1转子偏差角。
角误差信号电压R U 加到伺服放大器进行电压和功率放大后,加到伺服电机M 的控制绕组,使M 的转子转动,再经齿轮96:1减速,带动偏转线圈L 转过A θ?,使扫描线跟随天线同步地也转过A θ?;同时通过1:96升速,使B 3子也转过A θ?,则误差信号电压R U 消除,此后,过程同上,实现扫描线与天线同步旋转。可见,扫描线与天线同步旋转的过程,亦即在B 3不断产生R U ,又不断消除R U 的循环过程,故又称“差控制”。当采用一级自整角机时,角传递误差可达±0.25?,相应的动态下的角误差信号电压R U ≈0.2V 。
上述“伺服电机”M 是二相交流感应电动机,其电动机上转矩M 可表示为
sin e c K M u u j =D 式(10—9)
式中,e u 为激磁绕组电压,如加60V ,1000H Z ;c u 为控制绕组控制电压,来自伺服放大器输出;??为e u 与c u 的相位差;K 为比例常数。
⑵北向上 真方位扫描
图10-14中,开关S 1开关处于断,图中,S 1处在T.B (或N.U )位置,继电器K 动作,差动发送机B 2的三相定子分别接到方位同步三相定子;B 2的三相转子分别接罗经复示器B 4的三相定子。开关S 2接到“ON ”,罗经复示器B 4罗航向接收机接通,其转子通过减速齿轮(齿轮装置传动比与罗航向发送机处齿轮升速传动比相同)带动差动发送机B 2的三相转子转动,转动方向与航向变化方向相反,相对基准电零位转角与本船航向一致,使其合成磁场转角,因而使扫描线转角为天线转角A q 与罗经航向角?之和,即系统进入稳态后的北向上真方位扫描结构原理图如图10-13所示。
图10-13 北向上真方位扫描结构原理图
显见差动发送机起到角加法器的作用。差动发送机和罗经复示器构成真方位稳定器。扫描线转角S q 等于天线转角A q 和本航向角j 之和,即S A q q j =+,真方位扫描便得以实现。
2)船用雷达方位扫描的几种显示方式
处于本船位置固定在扫描中心的相对运动显示下有三种方式:船首向上、真北向上及航
向向上。其特点分别简述为:
⑴船首向上(Head-up )相对方位扫描方式
雷达未和陀螺罗经方位传送系统相连接;以船首标志线H.L 为基线,方位角为000?; ①H.L 始终指000?;
②可测目标距离r 和舷角K q (目标相对方位角)。若要定位,需再加航向角才得到目标真方位角;
③若本船改航向,则图像反转,图像仅相对于船首线而稳定,影响正常观测。
适用于狭水道航行,图像直观,并与窗外实景一致;便于判明前方来船处在左舷还是右 舷,有利于船船间避碰。如图10-14所示。
图10—14 船首向上相对方位扫描显示
本船在①处,H.L 指000?,目标A 在右舷30?、距离6 n mile ,显示于①屏面上的A ; 本船直线航行到②处,目标位于本船右舷90?,3 n mile 处,显示于②屏面上的B 处;本船在②处,右转45?,目标位于本船右舷45?,3 n mile 处有目标A ,显示于③屏面上的C 处。
为便于测读目标真方位,目前均采用待后介绍的电子方位线EBL 。适用于需要判断目 标处在本船的左舷或右舷。
⑵真北向上(North-up )真方位扫描方式
雷达方位系统与罗经方位传送系统相连接。以基线为真北N ,处于000?,S A q q j =+(?为本船航向角),同步但不同相,初相角即罗航向角?。其特点有:
①000?为地球真北;②H.L 指本船航向?;③可直接测读目标距离r 和真方位角
;
④若本船改航向,仅H.L 移动到新航向角?上,显像稳,显像不因改向而转动。 适用于海上船舶定位,但在?=180?及附近,显像有倒置感,不便。(可用下述“3)”法解决)如图10-15所示。
图10—15 真北向上真方位扫描显示
本船在①处,H.L 指050?,右舷30?(T.B =080?),6n mile 处有目标A ,显示于①屏面上的A 处;本船沿050?航向航行到②处,目标位于本船右舷90?(正横,T.B =140?),3n mile 处,显示于②屏面上的B 处;本船在②处,右转45?,H.L 指095?,而目标回波仍在T.B =140?,距离3 n mile 处不稳,显示于③屏面上的C 处。
⑶航向向上(Course-up)真方位扫描方式
雷达与罗经方位传送系统相连接。该方式综合了上述“艏向上”和“北向上”两种方位
New Corse up)钮,则扫描显示方式优点,当改向完毕时,只要按一下“新航向向上”(--
H.L、图像及可动方位圈一起转动,直至恢复H.L指000?为止。因此,可一直保持直观画面的观测。如图10-16所示。
图10—16 船向向上真方位扫描显示
本船在①处,H.L指000?,H.L指向可动方位圈的航向角050?,右舷030?(T.B=080?),距离6 n mile处有目标A,其回波显示于①屏面上的A处。本船沿050?航向航行到②处,目标位于本船右舷090?(正横,T.B=080?),距离3 n mile处,其回波显示于②屏面上的B处;
本船右转45?,H.L指在可动方位圈上095?,距离3 n mile,目标回波位置不动,显示于③屏面上的C处。当改向完毕,按了新航向向上“New Course-up”钮后,则H.L及可动方位圈的095?转到固定方位刻度盘的000?处,目标回波也转到相对方位045?处,显示于④平面上。
上述三种方位扫描显示方式功能特点如表10—2所示。从而可知,航向向上综合了具有艏向上、北向上的优点,因而得到普遍应用。
2.刻度系统
1)距离刻度(Calibrator 缩写CAL.)
雷达测距的实质是将距离的测量变换为时间的测量。距离刻度系统可提供一定的时间尺度,用这个尺度在扫描线测定电磁波在雷达与目标之间的往返时间量,并把其对应的目标距离显示出来。对距离刻度系统的要求是:①测距读数准确。测距精度小于所用量程最大距离的1.5%或70m,取大者(IMO要求);②测读方便、读数迅速。可用两种距离刻度(固定距标和可移距标)测读,固定距标和可移距标刻度亮度分别可调,按需选用。固定距标有圈距显示,随量程而变。可移距标现常用数字指示器;③电路及结构应力求简单、可靠。
⑴固定距标系统
模拟式船用雷达固定距标电路方波作用下产生与量程相适应的一串登时间间隔的窄脉
冲。常采用由晶体振荡器、整形电路、分频器(由量程定几分频)、固定距标脉冲形成电路组成,其组成框图及时间波形图如图10—17所示。
图10—17 固定距标电路组成框图
由图结合一例的数据,晶体振荡器在扫描负方波控制期间产生正弦振荡﹙其频率为
324Z KH f =,周期为3.09s m
,相当于1/4n mile ?﹚经整形电路使每周基振输出一个正方波﹙例如对方波进行2、4、8、16、40、80分频,相应输出相对于0.5、1、2、4、10、20 n mile
?方波﹚,送入选通门。同时,也将输入的未分频的相当于1/4n mile ?
的方波也送入选通门。分频数按量程划分对应的海里数及基准震荡频率选定;选通门输出方波宽度受量程控制;距标脉冲形成电路对应于量程选择的选通门方波输出,经微分、放大输出等间隔的正向固定距标脉冲,送到视频混合放大器放大后加到CRT 阴极。
对应雷达量程的划分有相应的距离划分。例如,对应8个量程距离的分频数、对应各分频海里数、选通方波相应的海里数及各量程的固定距标圈数及圈距等编成表,如表10—3所示。
由于不处在距标圈上的目标,只能大约估计其距离。因此,固定距标只能用于粗测目标距离。
现代船用雷达的数字式固定距标的形成,可运用计算机图形产生技术,结合船用雷达的上述一例数据的特征构成的原理是简而易行的。
⑵可移距标系统(V ariabal Rang Marker, 缩写VRM )
在扫描线上显示可移动的测距标志,天线旋转时成为半径可调的距标圈,称为“可移距标”,英文简称VRM ,用于精测目标距离,以满足雷达精确定位的需求,距离读数由数据窗显示。产生可移距标的实质是形成一个相对于同步脉冲时延t d 可调的脉冲,在屏面形成半径可调的可移距标圈。现代船用雷达均采用数字式可移距标系统,并采用可区分的双可移距标圈,分别有两个距离读数窗。
数字式可移距标电路由由扫描负方波触发的可移距标脉冲产生、移动距标脉冲形成、移动距标脉冲输出级和距离数码指示等各电路组成,其原理构成简框如图10—18所示。..
图10—18 数字式可移距标系统图例
输入控制电路由输入的距离扫描方波前沿触发,产生的可移距标方波宽度受VRM 测距控钮控制,当转动VRM 控钮时,改变了决定可移距标方波的RC 时间常数,从而调整方波
μ,对应于船用雷达的0.05n mile~120n mile的距离范围。宽度,可调范围为0.6~14832s
可移距标方波经形成电路,取出与方波后沿对应的可移距标脉冲,时延为t d,加到可移距标输出电路,该电路采用射极跟随器,具有阻抗匹配和前后隔离的作用。改变射极跟踪器供电电压,可进行VRM距标的亮度调节。输出的可移距标脉冲送到视频混合放大电路。
距离数码指示电路通常由晶体振荡器、计数控制门电路、十进制计数器、译码器/驱动器和数码指示器组成。晶体管振荡器常采用三极管石英晶体振荡电路,以产生稳定度较高的基准振荡频率,满足船用雷达测距精度的要求。船用雷达常采用的测距单元距离为0.01nmile,对应的时钟周期为0.1235sμ,即时钟频率为8090.5KH Z。在船用雷达中的数码指示器常采用荧光数码管,因其具有体积小、工作电压低、耗电小等优点而被广泛采用。2)方位刻度
用于测读目标方位角数据的装置。船用雷达显示器现采用电方位刻度,电刻度有船首标志线H.L和可移电子方位线EBL,用EBL测目标方位,数码管显示距离,使用方便,精度较高,尤其适合偏心扫描情况。在现代船用雷达和港口交管雷达中还用固定电子方位刻度。下面简要予以简介。
⑴船首标志线(Heading Flashing Line缩写H.L)
船首标志线H.L用来指示本船船首方向。雷达在正常工作时,船首线必须显示,只当需要观察船首方向是否存在微小目标回波时,才暂时切断显示。对船首线主要要求是必须在天线转到船首方向时才出现,且亮度足够且宽度合符要求。在港口交管雷达中,当然无需船首线,但显示真北标志短线,其形成的电路结构及原理与船首线类同。
①触点式船首标志电路
该电路在传统雷达中应用广泛。电路组成含船首标志触点和脉冲形成电路,如图10-19 所示。
图10—19 触点式船首标志电路
凸轮、触点装在天线底座里,每当天线转到船首向时,凸轮将触点闭合一次,使脉冲形成电路输出一个船首标志脉冲,经视频混合放大器加到CRT阴极。首标志脉冲其宽度(可预调)应保证显示的船首线亮度细而均匀,不随量程转换而变化。故需使船首线标志脉冲宽度能适应近、中、远量程时扫描线被增辉所需的次数,如图10-20所示。
图10-20 远、中、近量程锯齿波与船首脉冲的时间关系
由于触点式电路的机械触点易磨损,易沾油污接触不良,导致开关失灵,目前已被无触点式船首标志电路所替代。
②无触点式船首标志电路
该电路的组成原理图如图10-21所示。
图10-21 无触点式船首标志形成原理电路
由图可见,该电路是应用光电应产生船首标志脉冲的。带有一个小孔的圆盘与天线同步转动,转盘一侧有发光二极管,另一侧有光敏三极管。当天线转过船首方向时,发光二极管发的红外线通过转盘小孔使光敏三极管在光的作用下产生脉冲电流,在其射极电阻上可以取出船首标志脉冲,经放大处理送至视频混合放大器。在放大处理可包括上述的单稳态电路,且其输出的脉冲宽度一样要满足远、中、近量程形成同样船首线亮度的要求,如图10-21所示。
⑵电子方位线(Electronic Bearing Line缩写EBL)的形成
船用雷达的EBL产生电路也常分为触点式与无触点式两种。
①触点式EBL
其结构与触点式H.L电路相似。但EBL亮线应按需出现在360 的任何角位置,触点开关作用随EBL操作控钮旋转而定。因测量迟缓,使用不便而被无触点电路所替代。
②无触点式EBL
无触点,又要使形成的EBL的方位由测方位旋钮控制,测读的目标方位数据可用数码管显示。一种应用方位同步机形成EBL的构成框图如图10-22所示。
图10-22 EBL电路结构原理简框
方位同步机的三相分别与同步发送机三相定子并联,而其转子R1、R2则与EBL方位手轮(或控钮)相连。转子R1、R2的输出是受天线转角调制的已调波,已调波送相敏检波器,以检出正弦包络,经整形及方位脉冲形成电路,形成方位脉冲输出。
关于方位计数及数码显示电路。要计数、显示,必须有计数脉冲,有开始计数的零位脉冲,以及计数到EBL所在方位时停止计数后的的方位脉冲。其形成原理图如图10-23所示,这种电路已被现代船用雷达所常用。
图10-23 计数器方位脉冲形成原理图
?开有一个小孔,码盘两侧有光源和光电变换器,后者由光电二方位刻度码盘上每隔θ
极管V D1、光电放大器V1和钳位二极管V D2组成。
3.视频一次处理及混合放大系统
以上所述的固定距标、可移距标、船首标志、电子方位标志、真北标志等各种脉冲信号和目标回波视频信号进行混合放大,再加到CRT阴极,经过亮度调制后在荧光屏上显示。但在加到CRT前,还必须对上述各种信号作如下处理:
对各路信号进行不失真放大,达到显像管正常显示所需要的调制幅值,约20V~40V。将各路信号进行混合,而又互不影响,需要采取隔离及匹配措施。
对各路信号进行限幅及总限幅电平调整,或加对数衰减,以达到显像管显示亮度对比﹙强弱﹚满足观测者习惯的要求。
目标回波视频脉冲信号在输入视频混合放大级之前,必须对存在的雨雪、海浪及同频雷达等各种干扰进行抑制处理,以提高显示的效果。
1)视频混合放大的组成框图及主要技术要求
⑴基本组成框图
视频混合放大系统的组成框图如图10-24所示。
图10-24 视频混合放大器组成框图
来自收发机的目标回波视频信号经过抗雨雪干扰电路及一级视频放大器后经抑制同频干扰电路后加入视频混合放大器,其中,船首标志、电方位标志、固定距标、可移标志等脉冲信号分别经隔离元件接入混频混合放大器。回波及各种标志信号经混合放大后经限幅、射极跟随器加到末级视频功率放大器,最后以负极性的混合信号送到CRT阴极,进行亮度调制,便能在CRT屏上显示之。
⑵视频混合放大系统的主要技术要求
要有足够的电压增益,以保证满足CRT控制栅极所需要的电压幅度;
f?,力求减小被放大信号的失真;
要有足够的视频通频带
V
被放大的各种信号之间要有隔离措施,以减免相互影响;
系统工作要稳定可靠。
2)视频放大及视频一次处理
雷达目标回波视频处理通常可分为一次图像处理和二次图形处理。雷达信号处理视为“一次处理”,雷达数据处理称为“二次处理”。此处进行的是“一次处理”。
⑴雨雪干扰抑制(Fast Time Constant, 缩写FTC)
因雨雪反射产生对雷达目标回波的干扰,称为“雨雪干扰”。由于雷达分辨不出相邻雨点、相邻雪片之间距,其回波视频宽度变的很宽,导致因雨雪反射波产生的在屏上显示呈棉
絮状亮斑、无明显边沿干扰特征的雷达回波图像。
微分电路的构成原理框图如图10-25所示,图中“微分处理及控制”的电容一般为几十至几百pf(级间耦合电容为几个 f),电阻很小,可直接用下级输入电阻。微分程度按需可调,以达到“去干扰、保目标”的效果,可以通过调整微分电路的时常数来实现。但微分本身也削弱了输出的回波视频幅值,而削弱程度与其阻、容时常数有关,时常数越大,回波削弱小,但干扰又去除不净;反之亦然。因此,为妥善抑制,使用中只要注意做到晴天不用雨天用,正确控制“晴/雨”开关即可。用近量程、中量程时,需要时常数较小,能完成抑制雨雪干扰和耦合窄脉冲、中脉冲的回波视频的目的;远量程时,需要时常数较大的耦合电路,适应远量程宽回波视频需求,以利于发现远距离目标。
图10-26 微分电路原理框图
船用雷达常用反向偏置的稳压二极管替代常规小电容,当调整其反向偏压大小,稳压二极管等效的电容也随之而变,从而可按雨雪量大小,适当调整,力求去干扰保留目标回波,显示器面板控制采用电位器旋钮。
可见,微分电路可成为一种将脉宽从宽变窄的简单电路,被应用雷达抗雨雪干扰电路或即快时间常数(Fast Time Constant,简称FTC)电路,其抑制雨雪干扰原理示图如图10-26所示。
图10-25 利用微分电路抑制雨雪干扰原理示意图
a) 波形:(a)目标回波与干扰合成混合脉冲、(b)微分、(c)削波;
b) 海上实景与屏上显示
⑵同频雷达干扰抑制(Solve Correlation Processing)
因邻近他船同频段雷达发射的电磁波进入本船雷达天线而产生的干扰,称为“同频雷达干扰”。由于海上船舶数量不断增加,尤其在船舶交通密度较大的水域,相邻船同频段雷达之间将产生同频异步雷达之间相互干扰现象。“同频”是指雷达的工作频段相同,如同为x 波段;“异步”是指发生相互干扰的雷达发射脉冲(或距离扫描)重复频率与本船雷达扫描重复频率不同(重复频率相差1H z亦称“异步”)。由于是“异步”的,故在彼此显示屏上看到的干扰亮点与扫描是非相关的,显示具有不稳定、随机出现的特征,但本船雷达目标回波与扫描因相同周期而成强相关的,故其显示亮点示呈现具有稳定的特征。这种特征成为人们思考抗同频雷达干扰技术对策的关键依据。
采用相关处理技术,经过相关处理中,相关者为目标回波,输出;非相关者为干扰,被抑制,不输出。现代船用雷达视频处理中采用16分层,可进行相关处理复杂的运算。为避免按某种相关方法设计逻辑电路。现相关电路常用可编程阵列(PGA)或EPROM来实现,
因而可以在实验中随时修改相关方法。如RACAL 公司的Bridge Master 系列雷达和ARPA 采用16分层的相关处理,如图10-27所示。
图10-27 16分层相关处理图
数字回波视频依次的写入与读出由程序控制触发脉冲进行。有3个存贮器RAMA 、RAMB 、RAMC ,视频依次写入A 、B 、C 存贮器中,且在写入其中一个存贮器时,前2次周期所存的两个存贮器中读出,并经相关处理输出。例如从100个触发到104个触发时,脉冲读写的关系的规则如下表,不断重复上述的循环。
⑶反对数放大电路(Anti-Logarithm Amplifier )
现代船用雷达接收机前端均采用了微波集成电路MIC 集成块,其中含微波高放、本振和混频器。如前所述,微波高放已具有20db 的增益,因此,可简化接收机的构成,一般都只用线性—对数中放。设在中频放大环节的对数中放,其对数压缩作用对接收机抗过载起了很大作用,但同时目标回波信号也被压缩了。为此,在视频放大环节增加了反对数放大电路,以挽回被对数放大引起的回波信号的压缩损失,如图例10-28所示。
图10-28 反对数放大图例
来自收发机回波视频信号输入到视频放大级之前,先通过由CR1、CR2、CR3等构成的反对数放大电路。设线性-对数中放转折点定为1.4V ,当输入视频信号电压<1.4V 时(CR3阴极电位<1.4V ),视频信号经R 3(8K Ω)的小信号加到视放V 1级,对噪声衰减较大;当输入视频信号电压>1.4V 时(CR1阴极电位>1.4V ),视频信号经R 2(560Ω)、CR2、CR3
8
加到视放V1,由噪声电平及放大曲线可以看出,回波视频信号衰减小,如图10-29所示。
a) b)
图10-29 反对数放大的噪声特性及增益曲线
a) 信号与噪声电平;
b) 增益变化曲线
⑷视频展宽电路(Echo Stretch)
远距离目标回波弱,在屏上显示回波亮点小、不易发现。为了能增加雷达对远距离目标回波弱小的发现能力,可将其回波视频脉冲通过由积分或限幅构成视频展宽电路,使回波视频脉冲的宽度被展宽,以增大屏上显示的回波亮点尺寸,因而容易被发现。
但如果量程不分,都采用这种视频展宽电路,但有缺陷,必须对其采取相应对策: 回波视频在被展宽处理之前,应先经过抑制海浪、雨雪干扰处理,以免在展宽目标回波同时,也展宽了海浪、雨雪回波,影响显示效果;
视频展宽电路只适用于远量程。近量程工作不宜展宽发射窄脉冲回波,否则将导致由于回波展宽而破坏了原设计的近量程距离分辨力;
由于回波展宽容易造成目标误跟踪。
为此,需要对来自反对数的回波视频,经过视频展宽电路后实施控制,即控制视频展宽只能用于远量程。某船用雷达视频展宽电路的这种选择控制电路,如例图10-30所示。
图10-30 视频展宽电路的选用控制电路
图10-32中,A、B、C、D为电子开关管,G1为与非门,G2为视频放大管。
不用展宽视频时,G1“1”脚正常为“0”,近量程,G1“2”脚为“0”,①点为“1”,电子开关A通B、C通,C通,使来自反对数放大的视频经C1输出至组合视频放大级;D 通,A断,展宽视频不能输出。
用展宽视频时,G1“1”脚为“1”,远量程,G1“2”脚为“1”,G1输出低电位,①点为“0”,B断,因而D断,④点为“1”,A通,展宽视频得到输出,经C2送入视放级放大后输出;C断,使来自反对数放大的回波视频不能输出。
⑸视频混合放大器
船用雷达显示屏幕上显示的目标回波视频信号、固定距标圈(FRM)、可移距离圈(现有双VRM)、船首标志线(H.L)、电子方位线(现有双EBL或双REBL1,2)以及雷达性能监测信号等,所有这些信号相应的脉冲加到CRT阴极(或栅极),脉冲幅度一般需要20V 以上,因而都需要对各相应脉冲进行放大。为共用一个视频脉冲放大器,各路脉冲可采用二级管隔离法,尽可能减小相互影响。现代船用雷达的一种视频混合放大原理电路的内含如图10-31所示。
智能雷达光电探测监视系统单点基本方案
一、 系统概述
根据监控需求: 岸基对海 3~10 公里范围内主要大小批量目标; 主动雷达光电探测和识别; 多目标闯入和离去自动报警智能职守; 系统接入指挥中心进行远程监控管理; 目标海图显示管理; 系统能够自动发现可疑目标、跟踪锁定侵入目标、根据设定条件进行驱散、 同时自动生成事件报告记录,可以实现事故发生后的事件追溯,协助事故调查。 1. 项目建设主要目的 ? 为监控区域安全提供综合性的早期预警信息; ? 通过综合化监测提高处置和应对紧急突发事件的指挥能力。 2. 基本需求分析: 需配置全自动、全量程具备远距离小目标智能雷达探测监视和光电识别系 统,系统具备多目标自动持续稳定跟踪、多种智能报警功能、支持雷达视频实 时存储、支持留查取证的雷达视频联动回放功能等;同时后期系统需具备根据 用户需求的功能完善二次开发能力。同时支持后续相关功能、扩点组网应用需 求。 根据需求和建设主要目的,选型国际同类技术先进水平,拥有相关技术自 主知识产权,具备二次技术深化开发的北京海兰信数据科技股份有限公司 (2001 年成立,2010 年国内创业板上市,股票代码:300065,致力于航海智 能化与海洋防务/信息化的国内唯一上市企业)的智能监视雷达光电系统。该系 统在国内外有众多海事相关成熟应用案例,熟悉国内海事、海监、海警、渔政
公务执法及救捞业务需求特点等。同时,该系统近期成功中标国内近年来相关 领域多套(20 套)雷达光电组网项目,充分说明该系统的技术领先及成熟应 用的市场广泛接受度。
3. 项目建成后的主要特点 ? 全天候、全覆盖、全自动的立体化监控。该系统具备对多传感器信息 融合的能力,确保对探测范围内雷达信息源、光电、AIS、GPS 等设备信号源 进行有机的融合和整合。 ? 系统具备了预警、报警、实时录取回放的综合功能。任何目标物进入 雷达视距时,系统即开始进行监测。目标物触碰警报规则后,指挥室获得报警 信号,同时联动设备综合光电锁定警报目标,以便驱离。整个过程系统实时记 录、方便随时调用回放。 ? 系统技术水平国内领先。该系统中创新地采用了国际先进的“先跟踪 后探测”算法技术对目标进行探测和跟踪,保证了在严苛条件下满足对目标地 探测与持续跟踪能力。 ? 该系统采用先进的设计思想,开放灵活的系统网络架构,能够根据需 求进行不同的组合和配置,系统可扩展性强。 ? 维护便捷,由于采用网络架构,获得用户授权后能连接到用户网络, 可以远程支援维修维护系统,从而提高维护效率,减少维护成本。 ? 可靠性高,充分适应不同的海洋环境。
二、 系统设备清单
序号 1
2
材料名称
规格型号
X 波段雷达,IP65(含安装支架) HLD800/900;8ft,25kw
小目标雷达数据处理器及显示 HLD-STTD-1000
终端软件
Radpro V1.6.0.0
数量 1套
1套
浅谈雷达显示方式的一次显示 【摘要】一次显示是现代雷达中显示目标参数的一种重要的显示方式。本文详细的介绍了一次显示在现代雷达显示数据的重要功能、以及一次显示的数据在雷达中如何形成、处理、最后在雷达的终端上显示的过程。 【关键词】一次显示;显示器;压缩处理 1.一次显示技术简介 雷达终端显示器用来显示雷达所获得的目标信息和情报,显示的内容包括目标的位置及其运动情况,目标的各种特征参数等。早期的雷达终端显示器主要采用模拟技术来显示雷达原始图像。随着数字技术的飞速发展以及雷达系统功能的不断提高,现代雷达的终端显示器除了显示雷达原始图像之外,还要显示经过计算机处理的雷达数据,例如目标的高度、航向、速度、轨迹、架数以及人工对雷达进行操作或控制的标志过数据,现代雷达的终端显示器的显示方式有两种,分为一次显示和二次显示。一次显示主要通过接收雷达的原始视频、检查视频、状态信息、目标参数,通过计算机处理,采用FPGA完成一次视频的加工、处理,实现一次信息的现实。 2.一次显示实现方法及系统组成 一次显示计算机在通过光口接收到信号处理数据后,通过总线译码缓冲逻辑将数据分别送给两片信号处理芯片,用于搜索、跟踪两路显示画面的映射数据读取和信号处理,进行信号处理之后的数据分别通过双口显存译码逻辑存储到两个显示器对应的显示存储区中,按照两个示器的帧同步脉冲、行同步脉冲送出,通过D/A和运放之后与输入的二次显示驱动信号叠加,并将最终显示驱动信号数据输出,实现一次显示的功能组成框图如图1所示。 图1 一次显示功能框图 3.一次显示实现的步骤 一次显示模块显示软件采用区域波位更新的方式,根据各波位返回的数据的不同进行缓冲区刷新,而后对缓冲区进行显示打出。 实现步骤为: 第一步:距离压缩采用FPGA实现; 第二步:角度映射,根据现实内容的情况建立每个显示映射区,将前面压缩后的数据与显示映射区内的数据选大后更新;
第18卷 第7期 中 国 水 运 Vol.18 No.7 2018年 7月 China Water Transport July 2018 收稿日期:2018-02-08 作者简介:陈纳新(1992-),男,河南人,重庆邮电大学移动通信重点实验室硕士生,研究方向为雷达显控。 基金项目:国家自然科学基金(61301126,61471077),长江学者和创新团队发展计划(IRT1299),重庆市科委重点 实验室专项经费,重庆市基础科学与前沿技术研究项目(cstc2017jcyjAX0380,cstc2015jcyjBX0065), 重庆市高校优秀成果转化资助项目(KJZH17117)。 Android 平台下的雷达显控系统设计 陈纳新,余 斌 (重庆邮电大学移动通信重点实验室,重庆 400065) 摘 要:针对传统雷达显控终端在便携性、人机交互方面的不足,本文结合OpenGL(Open Graphics Library)纹理技术在雷达显控的应用,设计并实现了一种Android 平台下的雷达显控系统。该系统实现了雷达平面位置显示(Plan Position Indicator,PPI)、警戒区目标闪烁功能。该系统具有显示效率高、内存占用小、支持触屏操作、便携性好等优点。 关键词:雷达;PPI 显示;Android;OpenGL 中图分类号:TN957 文献标识码:A 文章编号:1006-7973(2018)07-0087-03 一、引言 船舶导航雷达用于探测海面上的冰山、礁石、船只、浮冰等各类物体,并可提供有效的目标方位及距离信息,从而使船舶避让各类障碍物,防止碰撞事故发生,是船艇航海必备的导航设备[1-3]。现代船载导航雷达显示系统主要特点为数字化的信息处理、高效的信息展示、简单易用的人机交互方式[4],实现方式多为片上系统(System on Chip,SOC)平台或以ARM(Advanced RISC Machines)为核心的嵌入式平台[5]。雷达显控终端作为雷达操作员与雷达系统间的重要桥梁,具备雷达视频图像的绘制、目标的识别与跟踪、船舶信息的显示等众多功能,提供了重要的导航信息[6-8]。 二、雷达视频显示 本系统对原始雷达回波数据进行解析,并将索引、量程、角度、视频数据存入EchoBean 对象中,随后系统使用该对象在大小为10241024 像素的雷达图像显示区域进行雷达图像的绘制。EchoBean 类的定义如下。 ClassEchoBean{ int range;//量程 int angle;//回波角度 int packetIndex;//数据包索引 byte[] data;//雷达视频数据 } 由于雷达天线硬件上的限制,接收的方位信号不稳定,具有一定的随机性[9]。因此在绘制时,2帧间的图像绘制以第1帧的数据作为绘制数据,以2帧间角度差作为绘制角度,来绘制扇形区域的雷达回波图像。出于效率、硬件消耗和显示效果的考虑,本系统不以帧为单位进行扇形绘制,而以一个给定的分割角度为单位进行绘制。若回波缓存区暂未绘制的回波数据累计角度差大于等于分割角度,则从回波缓存区 第1帧回波角度作为起点,绘制分割角度大小扇形区域的雷达回波图像。分割角度选取较大时,硬件消耗低,但画面刷新不流畅;分割角度选取较小时,画面刷新流畅,但对硬件消耗也更高,由于Android 系统所采用的硬件设备相对于传统PC 设备仍有不少差距,系统可根据实际运行效果对特定设备进行分割角度的调整以改善显示效果。本系统雷达天线旋转周期为2.5s,为使刷新频率达到24Hz (肉眼分辨极限,不会有卡顿感),故选取分割角度为6°。图1展示了角度分割绘制雷达图像的具体步骤。 获取本次绘图的第1帧数据data1以及第2帧数据data2从data1中获取回波数据和起始角度,从data2中获取结束角度调用渲染器的requestRender 方法,将更新后的图像刷新到屏幕是 否 接收数据并存入回波缓冲区 累计角度差达到6° 本次绘制角度是否达到6°? 是 否 根据回波角度、半径和回波数据更 新纹理缓冲区将data1和data2从回波缓冲区删除 图1 基于角度分割的雷达图像绘制流程图 三、雷达警戒区报警 雷达的警戒区报警功能指用户在雷达图像显示区指定一个封闭区域,系统自动检测其中的目标并进行报警操作。系
word 完美格式
智能雷达光电探测监视系统单点基本方案
一、 系统概述
根据监控需求: 岸基对海 3~10 公里范围内主要大小批量目标; 主动雷达光电探测和识别; 多目标闯入和离去自动报警智能职守; 系统接入指挥中心进行远程监控管理; 目标海图显示管理; 系统能够自动发现可疑目标、跟踪锁定侵入目标、根据设定条件进行驱 散、同时自动生成事件报告记录,可以实现事故发生后的事件追溯,协助事故 调查。 1. 项目建设主要目的 ? 为监控区域安全提供综合性的早期预警信息; ? 通过综合化监测提高处置和应对紧急突发事件的指挥能力。 2. 基本需求分析: 需配置全自动、全量程具备远距离小目标智能雷达探测监视和光电识别 系统,系统具备多目标自动持续稳定跟踪、多种智能报警功能、支持雷达视 频实时存储、支持留查取证的雷达视频联动回放功能等;同时后期系统需具
精心整理 学习帮手
word 完美格式
备根据用户需求的功能完善二次开发能力。同时支持后续相关功能、扩点组 网应用需求。
根据需求和建设主要目的,选型国际同类技术先进水平,拥有相关技术 自主知识产权,具备二次技术深化开发的北京海兰信数据科技股份有限公司 (2001 年成立,2010 年国内创业板上市,股票代码:300065,致力于航海 智能化与海洋防务/信息化的国内唯一上市企业)的智能监视雷达光电系统。 该系统在国内外有众多海事相关成熟应用案例,熟悉国内海事、海监、海 警、渔政公务执法及救捞业务需求特点等。同时,该系统近期成功中标国内 近年来相关领域多套(20 套)雷达光电组网项目,充分说明该系统的技术领 先及成熟应用的市场广泛接受度。
3. 项目建成后的主要特点 ? 全天候、全覆盖、全自动的立体化监控。该系统具备对多传感器信息 融合的能力,确保对探测范围内雷达信息源、光电、AIS、GPS 等设备信号源 进行有机的融合和整合。 ? 系统具备了预警、报警、实时录取回放的综合功能。任何目标物进入 雷达视距时,系统即开始进行监测。目标物触碰警报规则后,指挥室获得报 警信号,同时联动设备综合光电锁定警报目标,以便驱离。整个过程系统实 时记录、方便随时调用回放。
精心整理 学习帮手
雷达软件操作说明 一、UCP软件的安装与设置 1. UCP软件的主要作用 UCP的主要作用是根据气象雷达算法生成雷达产品,以及分发产品到各路的PUP上;接收RDASC的部分信息从而监视和控制雷达运行;同时可以在本机磁盘存放基数据,存放路径可通过适配文件addedcfg.txt查阅、修改。 2.UCP的安装与设置 (1)双击安装程序“RPG(SA) Setup.exe”开始安装,一 直点击“next”(下一步),直到选择安装路径时,其默认 的安装路径是D:\RPG,可以通过“Browse”命令按钮打 开对话框修改。如右图: (2)输入RDASC计算机的网络名,默认是RDA,直接点击 “next”。如图5.2.2: (3)输入保存雷达状态信息和基数据的位置,默认保存在D盘(如左下图)。资料保存路径等设置亦可在安装结束后通过UCP所在的安装路径D:\RPG 10.8.1.S.C\下的参数配置文件addedcfg.txt中修改,其内容如右下图: (4)点击“next”,选择典型安装(Typical),再一直点击 “next”即可完成安装。 (5)软件注册。 启动UCP软件,第一次启动时,会弹出一个“RPG Program
Register”的注册框, 打开注册软件“RpgReg.exe”,出现“RPG Register (Version 10)”。如右图 把“RPG Program Register”上面的“Product Serial Number”框内的数字2181699293复制并粘贴到“RPG Register(Version 10)”的“Serial Num”栏,尔后点击“Register”按钮,即可生成注册码。如右图 再把注册码复制、粘贴到RPG注册提示框“RPG Program Register”上,点击OK即可完成安装。 (6)设置通信配置文件C:\ WINNT\Nbcomm.ini UCP生成的雷达产品如何发送到PUP产品显 示终端,是通过窄带通信配置文件Nbcomm.ini 来控制,相应地PUP也有Nbcomm.ini配置文件, 预报员通常是将RPG与PUP安装在同一台电脑, 则需要将RPG和PUP的Nbcomm.ini配置文件设 置为同一个文件,其通信配置内容如右图
雷达设备产品 雷达设备 一、指挥自动化系统 二、雷达及配套设备 (一)地面、车载雷达(二)机载、星载、弹载雷达(三)舰载雷达 通信设备产品 通信传输设备 一、通信发射机 (一)短波、单边带发射机(二)长波、超长波发射机(三)短波自适应发射机(四)其他发射机 二、通信接收机 (一)短波、单边带接收机(二)长波、超长波接收机(三)数字接收机
(四)其他接收机 三、微波通信设备 (一)微波收发通信机 (二)微波终端机 (三)微波天线、馈线 (四)其他微波设备 四、卫星应用产品 (一)卫星通信地面站天线 (二)卫星通信地面站低噪音放大器(三)卫星通信地面站上下变频器(四)卫星通信地面站高功率放大器(五)卫星通信地面站终端机(六)卫星遥感接收设备 (七)卫星导航定位接收设备(八)卫星气象接收设备 (九)其他卫星地面站和天线 五、散射通信设备 (一)散射通信终端机 (二)散射信道机 (三)散射通信天线 六、通信导航定向设备 (一)飞机通信导航定向设备
(二)航用通信导航定向设备 (三)地面通信导航定向设备 (四)其它通信导航定向设备 七、载波通信设备 (一)载波终端机 (二)载波增音机 (三)电力载波机 八、光通信设备 (一)光缆终端机 (二)光缆中继设备 (三)光纤放大器 (四)WDM波分复用器 (五)交叉联接设备 (六)其他光通信设备 通信交换设备 一、交换机 (一)程控交换机(不含移动程控交换机) 1、局用机 2、用户机 3、异步转移模式(A TM)及网络(IP)交换机 4、其他程控交换机
(二)电报交换机(三)其他交换机 二、用户接入设备(一)无线接入设备(二)电缆线接入设备(三)光纤接入设备(四)接入终端设备 通信终端设备 一、收发合一中小型电台(一)短波电台 (二)超短波电台(三)短波跳频电台(四)超短波跳频电台(五)短波单边带电台(六)其他收发合一电台二、电话单机 (一)普通电话机(二)录音电话机(三)可视电话机(四)无绳电话机(五)插卡电话机
基于DirectDraw的雷达显示终端的实现 于川,索继东,孟凡志 大连海事大学信息工程学院(116026) E-mail:yuwan1123@https://www.doczj.com/doc/f92211602.html, 摘要:雷达显示终端作为对雷达数据的直观表述,是各种雷达系统中重要组成部分。本文讨论了PPI雷达显示器的长余辉仿真的关键技术后,提出了一种新的基于DirectDraw的设计方法,使雷达显示终端可以实时显示视频数据。方法简单灵活、易于掌握,模块通用性和可扩展性强,可移植性高,为各种其它类型的雷达显示器及杂波现象仿真的研究打下了良好的基础。 关键词:DirectDraw,雷达显示终端,雷达长余辉仿真,光栅扫描显示 1.引言 在各种雷达数据处理系统中,雷达显示终端是雷达与操作员之间直接进行交互操作的界面,是整个系统的最重要组成部分之一。在建立雷达数据处理或虚拟操作系统时,雷达显示器的仿真水平将直接影响到整个系统的效果。随着计算机、图形处理及其网络通信技术的飞速发展,各种雷达的仿真软件脱颖而出,其中传统雷达PPI雷达显示器的计算机仿真,是雷达显示逼真与否的关键技术,其数据显示的实时性又是仿真软件的主要性能指标。 传统的PPI(Plan Position Indicator)雷达靠荧光物质的余辉效应将原始回波信号显示在雷达屏幕上供人们观察。未经处理的信号质量往往很差, 主要靠专业人员的经验来辨认目标及形状。而借助于计算机进行的PPI雷达信号处理、显示、存储及模式识别等,不但可以高分辨率显示原始信号, 还可以对其进行加工处理。最基本的处理如对回波信号的恒虚警处理;对目标的跟踪,以便对于感兴趣的目标进行观察;对图形进行去噪声、锐化等, 以改善图像质量, 利于人工辨别;更高级的处理如用不同的色彩表示目标的敌我性质、目标是否活动,用图示矢量表示活动目标的速度与方向等,对重点目标还可以开窗显示。 画线方法是一种十分简单而且容易实现的长余辉仿真方法,即在屏幕上以画直线的方式画出每一角度的扫描线。当程序运行时,扫描线轨迹不断地在屏幕上转动,该方法不能无缝覆盖整个扇扫区域,产生一个辐射状的固定花纹,难以进行真实的仿真。固定扇扫点方法是在画线方法基础上改进的一种仿真方法,它虽然消除了辐射状花纹,但这种方法也存在一些问题:对于没有回波与有回波信号显示时,由于数据量的增加,造成扫描线的转速不同;数据计算和显示过程所消耗的时间降低了实时性。 在追求实时性能和逼真的显示效果同时,可以将系统内存、显示内存结合起来,利用Windows多线程、DirectDraw的多层显示技术可以实现快速的雷达全屏显示仿真。2.DirectDraw显示雷达终端的机理 DirectDraw是一种Microsoft DirectX API,它可以提供对显示处理、位图数据和非屏幕内存(off-screen memory)控制以及对其它硬件功能的快速访问[1]。 在光栅扫描显示系统中,显示屏上的每一个象素就对应显存中的一个位置。在显示器加 - 1 -
雷达数据处理步骤及效果展示 一、隧道衬砌质量检测数据处理步骤 1、打开软件RADAN,选择文件夹View→Customize→Directories; 2、打开文件File→Open(*.dzt); 3、扫描信息预编辑:选择一段扫描剖面,切除多余扫描信息Cut,保存特定扫描剖面; 4、文件测量方向反转:打开文件,选择File→Save As ,打勾,另存; 5、距离信息编辑:(1)编辑文件头的距离信息Edit→File Header, 扫描/米[scans/m], 米/标记[m/mark],(2)编辑用户标记,(3)距离归一化处理; 6、里程编辑:Edit→File Header →3D option→X start输入里程起点坐标; 7、水平幅度调整: Process→Horizontal scale(叠加stacking、抽道skipping、加密stretching); 8、调整地面反射信号位置:方法有两种,(1)Edit→File Header→position(ns),(2)Process→Correct Position→delta pos (ns); 9、介电常数调整:利用经验或钻孔获得介电常数,通过Edit→File Header→DielConstant调整; 10、增益调整: Process→Range Gain,增益点数易选5个; 11、水平滤波: Process→FIR Filter; 12、背景去除: Process→FIR Filter; 13、一维频率滤波 Process→IIR Filter; 14、反褶积、一维频率滤波: Process→Deconvolution; Process→IIR Filter; 15、文件拼接:选择File→Append files;
智能雷达光电探测监视系统单点基本方案 一、系统概述 根据监控需求: 岸基对海3~10公里围主要大小批量目标; 主动雷达光电探测和识别; 多目标闯入和离去自动报警智能职守; 系统接入指挥中心进行远程监控管理; 目标海图显示管理; 系统能够自动发现可疑目标、跟踪锁定侵入目标、根据设定条件进行驱散、同时自动生成事件报告记录,可以实现事故发生后的事件追溯,协助事故调查。 1. 项目建设主要目的 ?为监控区域安全提供综合性的早期预警信息; ?通过综合化监测提高处置和应对紧急突发事件的指挥能力。 2. 基本需求分析: 需配置全自动、全量程具备远距离小目标智能雷达探测监视和光电识别系统,系统具备多目标自动持续稳定跟踪、多种智能报警功能、支持雷达视频实时存储、支持留查取证的雷达视频联动回放功能等;同时后期系统需具备根据用户需求的功能完善二次开发能力。同时支持后续相关功能、扩点组网应用需求。 根据需求和建设主要目的,选型国际同类技术先进水平,拥有相关技术自主知识产权,具备二次技术深化开发的海兰信数据科技股份(2001年成立,2010年国创业板上市,股票代码:300065,致力于航海智能化与海洋防务/信息化的国唯一上市企业)的智能监视雷达光电系统。该系统在国外有众多海事相关成熟应用案例,熟悉国海事、海监、海警、渔政公务执法及救捞业务需
求特点等。同时,该系统近期成功中标国近年来相关领域多套(20套)雷达光电组网项目,充分说明该系统的技术领先及成熟应用的市场广泛接受度。 3. 项目建成后的主要特点 ?全天候、全覆盖、全自动的立体化监控。该系统具备对多传感器信息融合的能力,确保对探测围雷达信息源、光电、AIS、GPS等设备信号源进行有机的融合和整合。 ?系统具备了预警、报警、实时录取回放的综合功能。任何目标物进入雷达视距时,系统即开始进行监测。目标物触碰警报规则后,指挥室获得报警信号,同时联动设备综合光电锁定警报目标,以便驱离。整个过程系统实时记录、方便随时调用回放。 ?系统技术水平国领先。该系统中创新地采用了国际先进的“先跟踪后探测”算法技术对目标进行探测和跟踪,保证了在严苛条件下满足对目标地探测与持续跟踪能力。 ?该系统采用先进的设计思想,开放灵活的系统网络架构,能够根据需求进行不同的组合和配置,系统可扩展性强。 ?维护便捷,由于采用网络架构,获得用户授权后能连接到用户网络,可以远程支援维修维护系统,从而提高维护效率,减少维护成本。 ?可靠性高,充分适应不同的海洋环境。 二、系统设备清单
文章编号:1009-8119(2005)12-0033-03 一种基于Windows系统的雷达显控终端软件设计 郝春环高梅国 (北京理工大学电子工程系,北京 100081) 摘要介绍了一种在Windows 2000下雷达显控终端软件的设计,本软件采用图形化用户界面,航迹显示具有缩放功能,且操作方便、灵活。详细介绍了图形缩放的原理及实现。 关键词显控终端,人机交互,图形用户界面 Software Design for Radar Display and Control Terminal Based on Windows System Hao Chunhuan Gao Meiguo (Electronic Engineering Department , Beijing Institute of technology,Beijing 100081) Abstrac t The paper introduces the software design for radar display and control terminal under Windows 2000 system . Using graphical user interface , the software is convenient and flexible in operation, and it has graphics zoom function for trace display. A particular description for the graphics zoom principle and method is given in the paper. Keywords Display and control terminal, Man machine interaction,GUI 1 引言 雷达显控终端是操作员与雷达系统进行交互的一个平台,主要负责显示雷达信号处理机输出的目标信息,供操作员观察,并且向信号处理机传送控制命令,实现操作员对雷达工作模式的切换和对雷达工作状态的监控。有的显控终端还负责完成雷达数据的二次处理。 近年来,随着微电子技术以及软件技术的飞速发展,人们开始大量采用通用微型计算机来完成雷达显控终端的工作。基于通用微机的数字化雷达显控终端,利用通用显卡的图形加速功能,而不需要设计专用的显示控制电路,既简化了开发过程,又明显改善了显示性能;优秀的操作系统使得显控系统更健壮,操作更方便。本文设计的显控终端软件就是运行在一台通用微机上的。考虑到显示的直观和交互的灵活,选择在Windows下开发程序。随着交互事件的日益频繁,已往面向过程的程序设计已经表现出很大的不足:交互事件的随机性使得在等待某一事件(比如鼠标操作)的发生时,会将此时发生的另一些事件丢失,从而不能保证交互的正常完成。而Windows程序是基于消息、事件驱动的,可以灵活的响应鼠标、键盘等发出的消息,可靠的完成交互任务。本文介绍的软件是在Win2000操作系统下,采用Visual C++开发的。 2 系统结构 系统用一台通用微机(简称主机)来进行显控终端的处理(如图1中虚线框部分)。显控终端软件就运行在这台主机上。用来完成雷达信号处理工作的是TMS320C6x系列DSP信号处理板。DSP处理板作为一个PCI设备与主机(显控终端)接口,采用PLX9054 PCI接口芯片将DSP处理板设备映射到主机总线的地址空间。系统在DSP 的片内存储空间中开辟出一块缓冲区,用以和主机进行数据交换。雷达工作时,主机从信号处理板读取目标信息数据,经过雷达显控终端软件处理后显示在显示器上;另一方面接受鼠标、键盘传来的控制消息,产生对雷达的控制指令传送给信号处理板。
1 雷达子系统设备技术指标 (1)雷达天线 天线类型:X波段波导开缝天线 天线尺寸:≥18ft 天线增益:≥35dB 水平波宽:≤0.45°(-3dB) 垂直波宽:≥10° 天线转速:20r/min(转速可编程) 极化方式:水平线极化 付瓣电平:≤-26dB(±10°内) ≤-30dB(±10°外) 驻波比:≤1.25 马达:有保护、有告警 电源:380V/220V±10%,50Hz±5% (2)雷达收发机 发射功率:25kw 发射频率:9375±30MHz 脉冲宽度:40ns~80ns/250ns~1000ns可调 脉宽误差:≤10ns 脉冲前沿宽度:≤20ns 脉冲后沿宽度:≤30ns 重复频率:400~5000Hz可调 噪声系数:≤4dB 中放带宽:3~20MHz与脉冲宽度自适应 对数中放范围:≥120dB 镜像抑制:≥18dB
扇形发射区数:4 扇形发射分辨力:1° (3)雷达维修终端 CPU:最新双核处理器,主频率≥3.0GHz,支持二级缓存,二级缓存≥2M,处理器数量≥2 内存:≥2GB,支持ECC内存纠错技术 内存磁盘:≥120GB,接口SATA,转速≥10000rpm 主板:CPU插座与CPU匹配 内存插槽:≥3 外设接口:并口≥1,串口≥1,PS/2≥2,USB≥4显示器:液晶,17in,1280*1024 2
3雷达数据综合处理子系统设备技术指标 (1)雷达信号处理器 采样频率:≥60MHz 幅度量化:≥8bit 方位量化:≥8192 处理范围:≥30n mile(每个雷达站) 视频更新延迟时间:≤300ms 陆地掩膜单元:≤0.044° 杂波处理:相关处理、STC、CFAR及门限处理等(2)目标录取器 目标视频:数字视频(反映目标回波的大小、形状、幅度、运 动尾迹) 视频幅度:≥4bit 视频分辨力:≤3m(距离,最小值) ≤0.088°(方位,最小值) 标绘视频:计算目标的大小及轴向 最大模拟目标数:100个 (3)目标跟踪器 跟踪能力:≥700(动目标)+300(静目标) 跟踪性能:在跟踪目标航速≤70kn,跟踪目标加速度≤1kn/s, 跟踪目标转向率≤3o/s时,能保持稳定跟踪;在目 标航向和航速基本不变的情况下,当两个跟踪目标
雷达数据处理-雷达数据处理 雷达数据处理-正文 *从一系列雷达测量值中,利用参数估值理论估计目标的位置、速度、加速度等运动参数;进行目标航迹处理;选择、跟踪目标;形成各种变换、校正、显示、报告或控制等数据;估计某些与目标形体、表面物理特性有关的参数等。早期的一些雷达,采用模拟式解算装置进行数据处理。现代雷达已采用数字计算机完成这些任务。 数据格式化雷达数据的原始形式是一些电的和非电的模拟量,经接收系统处理后在计算机的输入端已变成数字量。数字化的雷达数据以一定格式组成雷达数据字。雷达数据字可编成若干个字段,每一个字段指定接纳某个时刻测量到的雷达数据。雷达数据字是各种数据处理作业的原始量,编好后即送入计算机存储器内的指定位置。 校正雷达系统的失调会造成设备的非线性和不一致性,使雷达数据产生系统误差,影响目标参数的无偏估计。为保证高质量的雷达数据,预先把一批校正补偿数据存储于计算机中。雷达工作时,根据测量值或系统的状态用某种查表公式确定校正量的存储地址,再用插值法对测量值进行校正和补偿,以清除或减少雷达数据的系统误差。 坐标变换雷达数据是在以雷达天线为原点的球坐标系中测出的,如距离、方位角、仰角等。为了综合比较由不同雷达或测量设备得到的目标数据,往往需要先把这些球坐标数据变换到某个参考坐标系中。常用直角坐标系作为参考坐标系。另外,在球坐标系中观察到的目标速度、加速度等状态参数是一些视在几何分量的合成,不能代表目标在惯性空间的运动特征。若数据处理也在雷达球坐标系中进行,会由于视在角加速度和更高阶导数的存在使数据处理复杂化,或者产生较大的误差。适当选择坐标系,可以简化目标运动方程,提高处理效率或数据质量。 跟踪滤波器跟踪滤波器是雷达数据处理系统的核心。它根据雷达测量值实时估计当前的目标位置、速度等运动参数并推算出下一次观察时目标位置的预报值。这种预报值在跟踪雷达中用来检验下一次观测值的合理性;在搜索雷达中用于航迹相关处理。常用的跟踪滤波器有α-β滤波器、卡尔曼滤波器和维纳滤波器,可根据拥有的计算资源、被处理的目标数、目标的动态特性、雷达参数和处理系统的精度要求等条件选用。α-β滤波器的优点是算法简单,容易实现,对于非机动飞行的等速运动目标,位置估值和速度估值的平方误差最小,故可对等速运动目标进行最佳滤波。对于机动飞行的目标,由于α-β滤波器描述的目标运动模型与实际情况存在差异,会产生较大的误差。为此,广泛采用一种称为机动检测器的检测装置,以便在发现目标作机动飞行时能自动调整测量周期或修改α值和β值,使跟踪误差保持在允许的范围内。同α-β滤波器不同,卡尔曼滤波器中除装有稳态的目标轨迹模型外,还设有测量误差模型和目标轨迹的随机抖动模型。因此,它对时变和非时变的目标动态系统能作出最佳线性、最小方差的无偏估计。除目标状态的估计外,卡尔曼滤波器还能估计状态估值的误差协方差矩阵。利用误差协方差矩阵可以检测目标机动,调整滤波系数,实现对机动目标的自适应滤波。 目标航迹处理早期的搜索雷达由操作员从显示器上判定目标的存在,并逐次报出目标的位置。标图员根据报告的目标数据进行标图,并把图上的点顺序连接,形成目标航迹。这个过程称为目标航迹处理。现代雷达系统的航迹处理已无需人工处理,而主要由计算机来完成。利用计算机进行数据处理的搜索雷达,称为边跟踪边扫描雷达系统。雷达测量到的离散
雷达基数据读取程序-Fortran version 敏视达公司长期以来对国家巨额投入的雷达系统采取了极为保守 的数据策略,雷达基数据格式只能通过非正常的渠道获得, 阻碍了雷达在气象业务和科研上的应用。敏视达的软件终端产品PUP采取了极为无聊的注册码策略以保障其所谓的版权,真不知这种操作设置极为不便、性能低劣 的软件有何保护的必要。 WSR98D雷达数据完全雷同与WSR88D雷达数据格式,相关的数据格式在国外众多模式和雷达处理软件中都有描述,只不过大多数是C版本,鉴于 Fortran在数值计算中的优势,在此本人提供Fortran版本的数据接口,适用于读取体扫描的基数据文件,并可使用grads直接插值绘图,为大家 提供科研上的方便。其格式与以前国家气象中心网站上所描述的数据格式完全一致。 type radar_record character*14 unused1 integer*2 Message_Type character*2 channel character*10 unused2 integer*4 radical_collect_time !! 径向资料采集的GMT时间(毫秒) integer*2 radical_collect_date !! 儒略日(Julian)表示,自1970年1月1日开始 integer*2 unambiguousRange !! 不模糊距离,单位:0.1Km integer*2 AzimuthAngle !!方位角([数值/8.]*[180./4096.]=度) integer*2 DataNumber !! 当前仰角内径向数据序号 integer*2 DataStatus !! 径向数据状态 integer*2 ElevationAngle !!仰角 integer*2 ElevationNumber !!体扫内的仰角编号 integer*2 FirstGateRangeOfRef !!第一个强度库的距离(米) integer*2 FirstGateRangeOfDoppler !!第一个速度/谱宽库的距离(米) integer*2 ReflectivityGateSize !! 强度库长(米) integer*2 DopplerGateSize !!速度/谱宽库数 integer*2 ReflectivityGates !!强度库数 integer*2 DopplerGates !!速度/谱宽库数 integer*2 radicalnumber integer*4 coefofsys integer*2 RefPointer !!从雷达数据头到强度数据开始的字节数 integer*2 VelPointer !!从雷达数据头到速度数据开始的字节数 integer*2 SWPointer !!从雷达数据头到谱宽数据开始的字节数 integer*2 VelResolution !!速度分辨率:2=0.5m/s;4=1.0m/s integer*2 VCP !!体扫VCP模式(11,21,31,32)
第10章船用雷达终端显示器 10.1 概述 雷达接收机将天线受到的微弱目标经高频放大、混频、中频放大、检波极信号处理后,尚需提取回波中的目标信息,再在经必要的加工后直观显示于显示器上,此过程由雷达终端来实现。现代雷达终端显示的基本内容含:目标数据的录取、数据处理及目标航行状态的显示的典型组成框图如图10-1所示。 图10-1 船用雷达终端的典型组成简框 图0-1中,“目标录取”用于实现对来自雷达录取机的雷达目标回波存在的确认,并提取目标的方位、距离、航速等信息:“数据处理”完成目标数据的关联、航迹处理、数据滤波跟踪;方位角编码完成天线瞬间方位角数据的提取机其极坐标转换成直角平面坐标,“显示系统”完成目标的位置、运动状态及其它信息的显示。 10.2 船用雷达显示器件 船用雷达终端显示器采用的显示器件有两大类;磁偏转阴极射线管﹙CRT﹚和液晶显示器﹙LCD﹚,终端显示器有多种扫描方式工作:对传统船用雷达CRT显示器,常采用径向园扫描方式;对现代船用雷达LCD显示器,常采用光栅扫描显示方式。 按照需要显示的信息类型,可分为“一次信息”和“二次信息”显示。 10.2.1 阴极射线管CRT(Cathode Ray Tube) 船用雷达要求使用具有余辉、亮度大、聚焦好、屏面尺寸大及磁偏转的CRT,以适应在宽阔海域中能得到较好的图像分辨力、清晰度及亮度画面的观测要求。 雷达显示器常用的CRT有三类:静电式:电子束聚焦,由管内极板间静电场完成电子束偏转,简言静电聚焦、静电偏转CRT,常用于军用A型显示器,也常见于实验室的普通示波管;磁式:电子束的聚焦与偏转均由装在管颈外的线圈流入电流产生的磁场完成,传统船用雷达常用;混合式:静电聚焦、磁偏转,因其具有供电方便、消耗功率小、结构简单、偏转灵敏度高等诸如优点。船用雷达常被广泛采用的是混合式CRT。