金字塔LK光流算法
- 格式:docx
- 大小:17.58 KB
- 文档页数:2
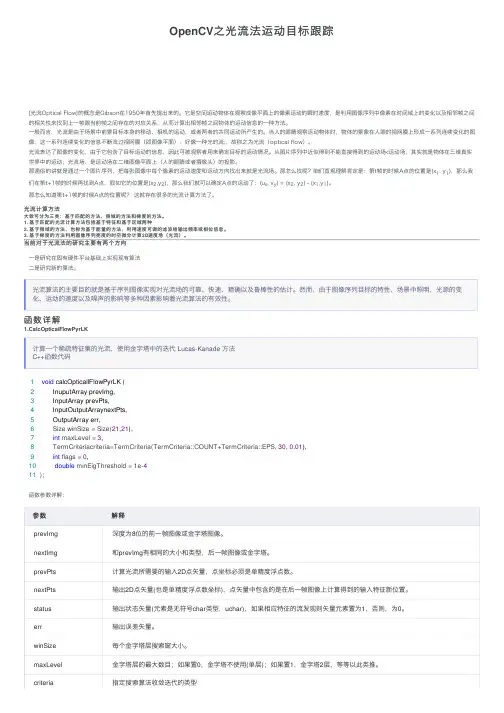
OpenCV之光流法运动⽬标跟踪[光流Optical Flow]的概念是Gibson在1950年⾸先提出来的。
它是空间运动物体在观察成像平⾯上的像素运动的瞬时速度,是利⽤图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上⼀帧跟当前帧之间存在的对应关系,从⽽计算出相邻帧之间物体的运动信息的⼀种⽅法。
⼀般⽽⾔,光流是由于场景中前景⽬标本⾝的移动、相机的运动,或者两者的共同运动所产⽣的。
当⼈的眼睛观察运动物体时,物体的景象在⼈眼的视⽹膜上形成⼀系列连续变化的图像,这⼀系列连续变化的信息不断流过视⽹膜(即图像平⾯),好像⼀种光的流;,故称之为光流(optical flow)。
光流表达了图像的变化,由于它包含了⽬标运动的信息,因此可被观察者⽤来确定⽬标的运动情况。
从图⽚序列中近似得到不能直接得到的运动场<运动场,其实就是物体在三维真实世界中的运动;光流场,是运动场在⼆维图像平⾯上(⼈的眼睛或者摄像头)的投影。
那通俗的讲就是通过⼀个图⽚序列,把每张图像中每个像素的运动速度和运动⽅向找出来就是光流场。
那怎么找呢?咱们直观理解肯定是:第t帧的时候A点的位置是(x1, y1),那么我们在第t+1帧的时候再找到A点,假如它的位置是(x2,y2),那么我们就可以确定A点的运动了:(u x, v y) = (x2, y2) - (x1,y1)。
那怎么知道第t+1帧的时候A点的位置呢? 这就存在很多的光流计算⽅法了。
光流计算⽅法⼤致可分为三类:基于匹配的⽅法、频域的⽅法和梯度的⽅法。
1. 基于匹配的光流计算⽅法包括基于特征和基于区域两种2. 基于频域的⽅法,也称为基于能量的⽅法,利⽤速度可调的滤波组输出频率或相位信息。
3. 基于梯度的⽅法利⽤图像序列亮度的时空微分计算2D速度场(光流)。
当前对于光流法的研究主要有两个⽅向⼀是研究在固有硬件平台基础上实现现有算法⼆是研究新的算法。
光流算法的主要⽬的就是基于序列图像实现对光流场的可靠、快速、精确以及鲁棒性的估计。
klt稀疏光流算法KLT稀疏光流算法光流是计算机视觉中的一个重要问题,它可以用来描述图像序列中像素的运动模式。
光流算法的目标是通过计算图像序列中相邻帧之间的像素位移,来得到像素的运动轨迹。
其中,KLT(Kanade-Lucas-Tomasi)稀疏光流算法是一种经典的光流算法,被广泛应用于目标跟踪、运动估计、三维重建等领域。
KLT稀疏光流算法的基本原理是通过在图像上选择一些具有代表性的特征点(如角点),然后利用这些特征点在相邻帧之间的位置变化来估计光流。
这些特征点的选择是通过对图像进行角点检测,如Harris角点检测算法,得到的。
角点是指在图像中具有明显变化的区域,通常与物体的边缘或纹理有关。
KLT稀疏光流算法的计算过程可以分为三个步骤:特征点选择、光流估计和光流跟踪。
在图像中选择一些具有代表性的特征点。
这些特征点应该具有良好的特征区分度和稳定性,能够在不同帧之间进行匹配。
常用的特征点选择方法有Harris角点检测、Shi-Tomasi角点检测等。
然后,对于每个特征点,通过计算其在相邻帧之间的位置变化来估计光流。
KLT算法假设相邻帧之间的光流是稳定的,并且特征点的位置变化可以通过一个小的位移向量来近似表示。
这个位移向量可以通过计算两幅图像之间的亮度变化来得到。
利用估计得到的光流,可以对特征点进行跟踪,即在下一帧图像中找到与当前帧图像中特征点对应的位置。
这个过程可以通过在当前帧图像中以光流为初始位置进行搜索来实现。
KLT稀疏光流算法具有计算量小、速度快的优点,适用于实时应用。
然而,由于其使用了稀疏特征点的假设,对于图像中没有明显变化的区域,光流估计可能会出现误差。
为了提高算法的鲁棒性,可以结合其他方法,如密集光流算法,来进行增量式光流估计。
总结起来,KLT稀疏光流算法通过选择具有代表性的特征点,并利用它们在相邻帧之间的位置变化来估计光流。
它是一种经典的光流算法,在目标跟踪、运动估计等领域有着广泛的应用。
光流法原理光流法是一种基于图像处理的运动估计方法,它可以通过分析图像中物体的运动轨迹来推断物体的运动情况。
光流法的基本原理是,通过比较相邻帧之间的像素点灰度值变化,从而计算出物体在图像中的运动速度和方向。
本文将从光流法的基本原理、应用领域、算法实现等方面进行详细介绍。
一、光流法基本原理光流法的基本原理是,通过比较相邻帧之间的像素点灰度值变化,从而计算出物体在图像中的运动速度和方向。
它基于两个假设:一是相邻帧之间的像素点灰度值变化与物体的运动有关;二是相邻像素点之间的灰度值变化是连续的。
根据这两个假设,可以得出光流方程:I(x+u, y+v, t+1) = I(x, y, t)其中,I(x,y,t)表示在时刻t下坐标为(x,y)的像素点的灰度值,(u,v)表示物体在水平和竖直方向上的运动速度。
根据光流方程,可以将光流法分为两类:基于亮度变化的光流法和基于相位变化的光流法。
基于亮度变化的光流法是最常用的光流法,它通过比较相邻帧之间像素点的灰度值变化来计算物体的运动速度和方向。
基于相位变化的光流法则是通过比较相邻帧之间像素点灰度值的相位变化来计算物体的运动速度和方向。
二、光流法应用领域光流法在计算机视觉和机器人领域中有着广泛的应用。
具体应用领域如下:1.视频压缩光流法可以用于视频压缩中,通过计算视频中物体的运动轨迹,可以对视频进行分区,并对每个分区内的像素点进行编码,从而实现视频的压缩。
2.目标跟踪光流法可以用于目标跟踪,通过计算目标物体在图像中的运动轨迹,可以实现目标物体的跟踪和识别。
3.自动驾驶光流法可以用于自动驾驶中,通过计算车辆周围物体的运动轨迹,可以实现车辆的自动驾驶和避障。
4.视频稳定光流法可以用于视频稳定中,通过计算相邻帧之间物体的运动轨迹,可以实现视频的稳定,从而提高视频的观看体验。
三、光流法算法实现光流法的算法实现主要有两种方法:基于区域的光流法和基于像素的光流法。
1.基于区域的光流法基于区域的光流法是将图像分成若干个区域,然后计算每个区域内像素点的平均运动速度和方向。
改进的金字塔Lucas Kanade光流算法实现多姿态视频人脸
特征点跟踪
刘姗姗
【期刊名称】《计算机光盘软件与应用》
【年(卷),期】2013(000)018
【摘要】目前,在人脸特征点跟踪领域,光流算法的使用较广泛。
本文提出对小姿态人脸采用仿射变换矫正以及对大姿态人脸通过跟踪准确特征点的偏移量改进金字塔Lucas Kanade光流方法。
实验结果表明,该算法比传统的金字塔Lucas Kanade光流算法在多姿态人脸特征点跟踪方面有更好的效果。
【总页数】2页(P57-58)
【作者】刘姗姗
【作者单位】四川师范大学招生就业处,成都 610068
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于DM642的金字塔Lucas-Kanade光流法计算速度信息 [J], 赖泊能;陈熙源;李庆华
2.基于图像分割的金字塔Lucas-Kanade光流法提取深度信息 [J], 李亚楠;赵耀;林春雨;白慧慧;刘美琴
3.基于Kanade-Lucas-Tomasi 算法的人脸特征点跟踪方法 [J], 段鸿;程义民;王以
孝;蔡尚书
4.Lucas Kanade光流算法在面部特征点跟踪中的应用 [J], 张磊
5.一种自适应的金字塔式Lucas-Kanade目标跟踪算法 [J], 唐建宇;
因版权原因,仅展示原文概要,查看原文内容请购买。
光流法(Lucas-Kanade method)是一种用于估计图像序列中像素点运动的方法。
下面是一个简单的Python代码示例,使用OpenCV库实现LK光流法:```pythonimport numpy as npimport cv2# 读取前后两帧图像cap = cv2.VideoCapture('vtest.avi')ret, old_frame = cap.read()ret, new_frame = cap.read()# 转换为灰度图像old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY) new_gray = cv2.cvtColor(new_frame, cv2.COLOR_BGR2GRAY) # 初始化特征点及对应坐标points = np.float32([[50,50],[100,50],[50,100],[100,100],[50,150],[1 00,150]])# 计算光流场lk_params = dict(winSize = (15,15),maxLevel = 2,criteria = (cv2.TERM_CRITERIA_EPS |cv2.TERM_CRITERIA_COUNT, 10, 0.03))# 使用Lucas-Kanade方法计算光流场flow = cv2.calcOpticalFlowPyrLK(old_gray, new_gray, points, None, lk_params)# 绘制运动轨迹for i,(new,old) in enumerate(zip(flow[1], points)):a,b = new.ravel()c,d = old.ravel()img2.line(a:b[0],c:d[0],color=(0,255,0),thickness=3) img2.circle(a:b[0],c:d[0],5,(0,0,255),-1)img2.circle(c:d[0],a:b[0],5,(0,255,0),-1)cv2.imshow('frame',img2)cv2.waitKey(30)cap.release()cv2.destroyAllWindows()```这个代码首先读取视频文件中的两帧图像,并将它们转换为灰度图像。
光流算法求速度
光流算法是一种计算从一帧图像到下一帧图像之间的移动物体速度的方法。
它基于光的亮度一致性假设,即相邻的像素在时间上保持相对稳定的亮度。
光流算法通过比较相邻帧图像中的像素亮度差异来求取物体的速度。
光流算法的基本原理如下:
1. 首先,从一帧图像中选择一些关键点,也称为特征点。
可以使用角点检测算法(如Harris角点检测)或其他特征检测方法找到这些特征点。
2. 接下来,在下一帧图像中找到与这些特征点相对应的点。
3. 然后,通过比较这些特征点在两帧图像中的位置变化来计算他们的视差(位移)。
光流向量可以通过这些视差得到。
4. 最后,根据光流向量的大小和方向可以估计出物体的运动速度。
有多种光流算法可以用来求解速度,如Lucas-Kanade算法、Horn-Schunck算法、Farneback算法等。
不同的算法具有不同的优缺点,在具体应用中可以根据需要选择合适的算法。
总的来说,光流算法通过比较图像间的亮度变化,利用光流向量来估计物体的移动速度。
面向粒子图像测速的光流金字塔插值优化方法
单良;简娟;熊俊哲;施飞杨;洪波;楼晓颖;孔明
【期刊名称】《光子学报》
【年(卷),期】2024(53)3
【摘要】提出了一种面向粒子图像测速的光流金字塔插值优化方法,可以减小重建角度误差和均方根误差,尤其是图像边缘部分的角度误差。
使用该优化算法分别对单涡流、双涡流、DNS湍流粒子场进行速度场重建,得到三种流场的均方根误差和平均角度误差比优化前至少降低了15.96%和19.87%。
搭建二维PIV实验系统,在待测流场中均匀撒入100μm的PSP粒子,进行旋转实验和注水实验,分别模拟涡流场和射流场,所提出的优化算法可以获得与常见算法流形一致的速度场。
【总页数】14页(P153-166)
【作者】单良;简娟;熊俊哲;施飞杨;洪波;楼晓颖;孔明
【作者单位】中国计量大学信息工程学院、浙江省电磁波信息技术与计量检测重点实验室;中国计量大学计量测试工程学院
【正文语种】中文
【中图分类】O351
【相关文献】
1.基于光流算法的粒子图像测速技术研究
2.航空图像光流场的逆向金字塔计算方法
3.基于量子行为粒子群优化算法的图像插值方法
4.基于光流法的粒子图像测速
5.基于物理学的改善粒子图像测速稳健光流方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
光流算法原理光流算法是一种用于计算图像中像素运动的技术,它可以帮助我们理解图像中物体的运动轨迹和速度。
光流算法的原理基于图像序列中相邻帧之间的像素亮度变化,通过分析这些变化来推断出像素的运动信息。
在计算机视觉和机器人领域,光流算法被广泛应用于目标跟踪、运动分析和三维重建等领域。
光流算法的基本原理是利用相邻帧之间的像素亮度变化来推断出像素的运动信息。
在图像序列中,如果一个像素在相邻帧之间发生了位移,那么它的亮度值也会随之发生变化。
光流算法就是通过分析这些亮度变化来计算出像素的运动信息。
在实际应用中,光流算法通常会对图像序列中的每个像素都进行运动估计,从而得到整个图像的运动场。
光流算法的计算过程可以分为两个步骤,特征点检测和光流估计。
在特征点检测阶段,算法会首先在图像中检测出一些具有显著亮度变化的像素点,这些像素点被称为特征点。
然后,在光流估计阶段,算法会利用这些特征点的亮度变化信息来计算它们的运动信息,从而得到整个图像的运动场。
在实际应用中,光流算法通常会面临一些挑战,比如图像噪声、运动模糊和遮挡等问题都会影响算法的准确性。
为了克服这些问题,研究人员提出了许多改进的光流算法,比如基于稠密光流的算法、基于稀疏光流的算法、以及基于深度学习的算法等。
这些改进的算法在实际应用中表现出了更好的稳定性和准确性。
总的来说,光流算法是一种用于计算图像中像素运动的技术,它通过分析图像序列中的像素亮度变化来推断出像素的运动信息。
在实际应用中,光流算法被广泛应用于目标跟踪、运动分析和三维重建等领域。
虽然光流算法在面对图像噪声、运动模糊和遮挡等问题时会面临一些挑战,但通过改进算法和技术手段,我们可以克服这些问题,从而更好地应用光流算法于实际场景中。
在未来,随着计算机视觉和机器人技术的不断发展,光流算法将会得到更广泛的应用,并且会不断地得到改进和完善,以满足不同应用场景的需求。
相信在不久的将来,光流算法将会成为计算机视觉和机器人领域中不可或缺的一部分,为我们的生活和工作带来更多的便利和效益。
包装工程第45卷第3期·208·PACKAGING ENGINEERING2024年2月动态场景下基于YOLOv5和几何约束的视觉SLAM算法王鸿宇1,吴岳忠1,2*,陈玲姣1,陈茜1(1.湖南工业大学轨道交通学院,湖南株洲412007;2.湖南省智能信息感知及处理技术重点实验室,湖南株洲412007)摘要:目的移动智能体在执行同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)的复杂任务时,动态物体的干扰会导致特征点间的关联减弱,系统定位精度下降,为此提出一种面向室内动态场景下基于YOLOv5和几何约束的视觉SLAM算法。
方法首先,以YOLOv5s为基础,将原有的CSPDarknet主干网络替换成轻量级的MobileNetV3网络,可以减少参数、加快运行速度,同时与ORB-SLAM2系统相结合,在提取ORB特征点的同时获取语义信息,并剔除先验的动态特征点。
然后,结合光流法和对极几何约束对可能残存的动态特征点进一步剔除。
最后,仅用静态特征点对相机位姿进行估计。
结果在TUM数据集上的实验结果表明,与ORB-SLAM2相比,在高动态序列下的ATE和RPE 都减少了90%以上,与DS-SLAM、Dyna-SLAM同类型系统相比,在保证定位精度和鲁棒性的同时,跟踪线程中处理一帧图像平均只需28.26 ms。
结论该算法能够有效降低动态物体对实时SLAM过程造成的干扰,为实现更加智能化、自动化的包装流程提供了可能。
关键词:视觉SLAM;动态场景;目标检测;光流法;对极几何约束中图分类号:TB486;TP242 文献标志码:A 文章编号:1001-3563(2024)03-0208-10DOI:10.19554/ki.1001-3563.2024.03.024Visual SLAM Algorithm Based on YOLOv5 and Geometric Constraints inDynamic ScenesWANG Hongyu1, WU Yuezhong1,2*, CHEN Lingjiao1, CHEN Xi1(1. School of Railway Transportation, Hunan University of Technology, Hunan Zhuzhou 412007, China;2.Key Laboratory for Intelligent Information Perception and Processing Technology, Hunan Zhuzhou 412007, China)ABSTRACT: When mobile intelligence agent performs the complex task of Simultaneous Localization And Mapping (SLAM), the interference of dynamic objects will weaken the correlation between feature points and the degradation of the system's localization accuracy. In this regard, the work aims to propose a visual SLAM algorithm based on YOLOv5 and geometric constraints for indoor dynamic scenes. First, based on YOLOv5s, the original CSPDarknet backbone network was replaced by a lightweight MobileNetV3 network, which could reduce parameters and speed up operation, and at the same time, it was combined with the ORB-SLAM2 system to obtain semantic information and eliminate a priori dynamic feature points while extracting ORB feature points. Then, the possible residual dynamic feature points were further culled by combining the optical flow method and epipolar geometric constraints. Finally, only static feature points were used for camera position estimation. Experimental results on the TUM data set showed that both ATE and RPE were收稿日期:2023-10-25基金项目:国家重点研发计划项目(2022YFE010300);湖南省自然科学基金项目(2021JJ50050,2022JJ50051,2023JJ30217);湖南省教育厅科学研究项目(22A0422,21A0350,21B0547,21C0430);中国高校产学研创新基金重点项目(2022IT052);湖南省研究生创新基金项目(CX20220835)*通信作者第45卷第3期王鸿宇,等:动态场景下基于YOLOv5和几何约束的视觉SLAM算法·209·reduced by more than 90% on average under high dynamic sequences compared with ORB-SLAM2, and the processing of one frame in the tracking thread took only 28.26 ms on average compared with the same type of systems of DS-SLAM and Dyna-SLAM, while guaranteeing localization accuracy and robustness. The algorithm can effectively reduce the interference caused by dynamic objects to the real-time SLAM process. It provides a possibility for more intelligent and automatic packaging process.KEY WORDS: visual SLAM; dynamic scene; target detection; optical flow method; epipolar geometric constraints视觉SLAM(Simultaneous Localization and Mapping)技术在包装行业的应用日益广泛,其通过分析相机捕获的图像信息,实现对环境的实时感知和三维重建。
基于图像分割的金字塔Lucas-Kanade光流法提取深度信息李亚楠;赵耀;林春雨;白慧慧;刘美琴【期刊名称】《铁道学报》【年(卷),期】2015(000)001【摘要】在2D到3D视频的转换过程中,深度信息的提取是最关键的问题。
本文利用图像分割的金字塔 Lucas-Kanade光流法提取2D视频中的深度信息,主要做了如下工作:1是通过计算当前帧的最大运动矢量来决定所需构建的金字塔层数,通过自适应的方式决定金字塔层数可以弥补因金字塔层数过多造成的信息丢失或者因金字塔层数过少而无法满足 Lucas-Kanade 光流算法的不足;2是在每层金字塔中,利用 Mean Shift 图像分割后的信息,去除本次迭代计算得到的运动矢量中的坏点,使得深度提取更加准确;3是自适应地调整每层金字塔的迭代次数,使得在实验结果的质量几乎不变的情况下,达到降低时间复杂度的目的;最后通过统计图像分割每类中的深度值对所得到的深度图进行优化,使得最终得到的深度图中物体边缘信息更加清晰。
实验结果表明,利用本文算法所得到的场景深度的边缘信息更加清晰,深度图中的坏点明显减少,在降低时间复杂度的同时,得到了较高质量的深度图。
【总页数】6页(P63-68)【作者】李亚楠;赵耀;林春雨;白慧慧;刘美琴【作者单位】北京交通大学计算机与信息技术学院信息所,北京 100044; 现代信息科学与网络技术北京市重点实验室,北京 100044;北京交通大学计算机与信息技术学院信息所,北京 100044; 现代信息科学与网络技术北京市重点实验室,北京 100044;北京交通大学计算机与信息技术学院信息所,北京 100044; 现代信息科学与网络技术北京市重点实验室,北京 100044;北京交通大学计算机与信息技术学院信息所,北京 100044; 现代信息科学与网络技术北京市重点实验室,北京100044;北京交通大学计算机与信息技术学院信息所,北京 100044; 现代信息科学与网络技术北京市重点实验室,北京 100044【正文语种】中文【中图分类】TP391【相关文献】1.基于图像金字塔的钢板表面深度信息提取方法 [J], 刘源泂;孔建益;徐福军;黄前德;王兴东2.基于DM642的金字塔Lucas-Kanade光流法计算速度信息 [J], 赖泊能;陈熙源;李庆华3.基于金字塔LK光流法及超声传感的微型无人机障碍识别优化研究 [J], 祝奔奔;万舟;王亮4.基于金字塔光流法的无人机室内定点悬停设计 [J], 於小杰;贺勇;刘盛华5.基于金字塔光流法的移动增强现实三维跟踪注册研究 [J], 郑磊;王占刚因版权原因,仅展示原文概要,查看原文内容请购买。
金字塔LK光流算法
constintMAX_CORNERS = 500;
voidCImageExampleDlg::OnBnClickedButton8()
{
// TODO: Add your control notification handler code here
IplImage* imgA =
cvLoadImage("F://program//Book//Chapter4//OpticalFlow0.jpg",CV_LOAD_IMAGE_GRAYSCALE);
IplImage* imgB =
cvLoadImage("F://program//Book//Chapter4//OpticalFlow1.jpg",CV_LOAD_IMAGE_GRAYSCALE);
CvSizeimg_sz = cvGetSize( imgA );
intwin_size = 10;
IplImage* imgC =
cvLoadImage("F://program//Book//Chapter4//OpticalFlow1.jpg",CV_LOAD_IMAGE_UNCHANGED);
// The first thing we need to do is get the features
// we want to track.
//
IplImage* eig_image = cvCreateImage( img_sz, IPL_DEPTH_32F, 1 );
IplImage* tmp_image = cvCreateImage( img_sz, IPL_DEPTH_32F, 1 );
intcorner_count = MAX_CORNERS;
CvPoint2D32f* cornersA = newCvPoint2D32f[ MAX_CORNERS ];
cvGoodFeaturesToTrack(
imgA,
eig_image,
tmp_image,
cornersA,
&corner_count,
0.01,
5.0,
0,
3,
0,
0.04
);
cvFindCornerSubPix(
imgA,
cornersA,
corner_count,
cvSize(win_size,win_size),
cvSize(-1,-1),
cvTermCriteria(CV_TERMCRIT_ITER|CV_TERMCRIT_EPS,20,0.03)
);
// Call the Lucas Kanade algorithm
//
charfeatures_found[ MAX_CORNERS ];
floatfeature_errors[ MAX_CORNERS ];
CvSizepyr_sz = cvSize( imgA->width+8, imgB->height/3 );
IplImage* pyrA = cvCreateImage( pyr_sz, IPL_DEPTH_32F, 1 );
IplImage* pyrB = cvCreateImage( pyr_sz, IPL_DEPTH_32F, 1 );
CvPoint2D32f* cornersB = newCvPoint2D32f[ MAX_CORNERS ];
cvCalcOpticalFlowPyrLK(
imgA,
imgB,
pyrA,
pyrB,
cornersA,
cornersB,
corner_count,
cvSize( win_size,win_size ),
5,
features_found,
feature_errors,
cvTermCriteria( CV_TERMCRIT_ITER | CV_TERMCRIT_EPS, 20, .3 ),
0
);
// Now make some image of what we are looking at:
//
for( inti=0; i
// printf("Error is %f/n",feature_errors[i]);
continue;
}
// printf("Got it/n");
CvPointp0 = cvPoint(
cvRound( cornersA[i].x ),
cvRound( cornersA[i].y )
);
CvPointp1 = cvPoint(
cvRound( cornersB[i].x ),
cvRound( cornersB[i].y )
);
cvLine( imgC, p0, p1, CV_RGB(255,0,0),2 );
}
cvNamedWindow("ImageA",0);
cvNamedWindow("ImageB",0);
cvNamedWindow("LKpyr_OpticalFlow",0);
cvShowImage("ImageA",imgA);
cvShowImage("ImageB",imgB);
cvShowImage("LKpyr_OpticalFlow",imgC);
}