
史上最全的AMESim-Matlab 联合仿真设置步骤(集大成者,图文并茂)
中国矿业大学机电学院 haierdhg
目前,文库及网上流行的AMESim-Matlab 联合仿真步骤基本不能用,经过几天的研究,终于找到了解决方案。本文论述了联合仿真的设置步骤、仿真时应注意的事项,以及有用的参考资料,敬请大家分享。
一、版本为AMESim8.0,Matlab2011b,VC++6.0
二、安装步骤
个人认为以上三个软件,没有安装顺序,但还是建议先安装VC++
1.将VC++中的"vcvar3
2.bat"文件从Microsoft Visual C++目录(通常是.\Microsoft Visual Studio\VC98\Bin中)拷贝至AMESim目录下(我的是C:\AMESim\v800)。(如果先安装的VC,后安装的AMESim,则在AMESim安装时,自动会拷贝该文件)
2.环境变量确认:(这里网上的教程大多是错的!环境变量分为用户变量和系统变量,网上教程大多没说清楚)
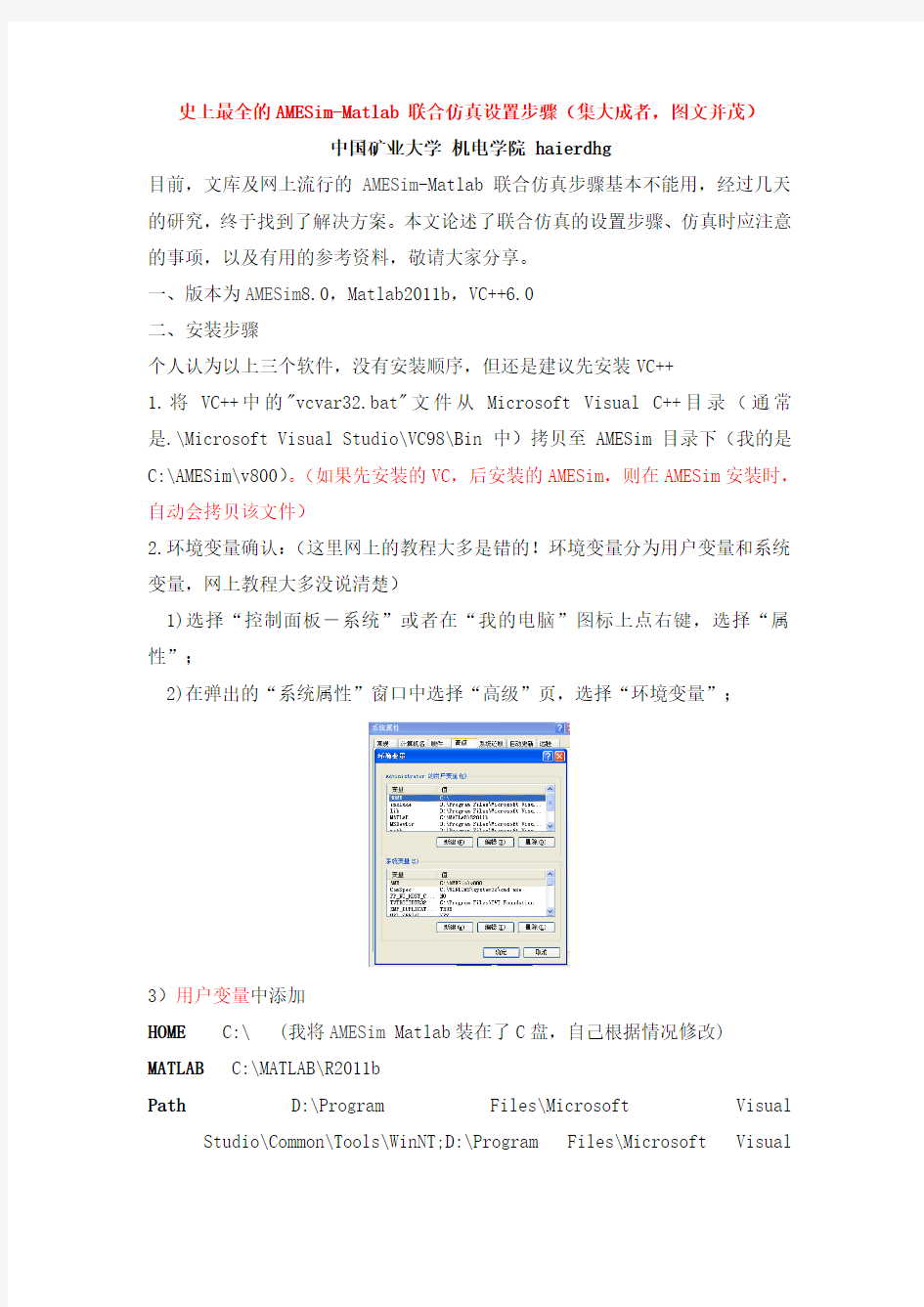
1)选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;
2)在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;
3)用户变量中添加
HOME C:\ (我将AMESim Matlab装在了C盘,自己根据情况修改) MATLAB C:\MATLAB\R2011b
Path D:\Program Files\Microsoft Visual Studio\Common\Tools\WinNT;D:\Program Files\Microsoft Visual
Studio\Common\MSDev98\Bin;D:\Program Files\Microsoft Visual Studio\Common\Tools;D:\Program Files\Microsoft Visual Studio\VC98\bin
4)在系统变量中添加
AME C:\AMESim\v800 (这个一般都有的,不需要自己添加);
Path D:\Program Files\Microsoft Visual Studio;C:\AMESim\v800;C:\AMESim\v800\win32;C:\AMESim\v800\sys\m
ingw32\bin;C:\AMESim\v800\sys\mpich\mpd\bin;C:\AMESim\v800\sys\
cgns;%SystemRoot%\system32;%SystemRoot%;%SystemRoot%\System32\W
bem;C:\MATLAB\R2011b\bin\win32;C:\WINDOWS\system32;C:\WINNT (该处很重要一定要添加,而且一定要包含C:\WINDOWS\system32,不然会有
引起很多错误)
3.确认是否在AMESim中选择VC作为编译器。具体操作在AMESim-〉
tools->Opions-> AMESim Preferences->Compilation/Parameters中。
4.在MATLAB命令窗口中使用Mex –setup,选择VC作为编译器(注意,mex后
面加一空格)。选取Y->2->Y
5.在Matlab set path中加上AMESim与Matlab 接口文件所在的目
录%AME%\matlab\amesim,其中%AME%是AMESim的安装目录, C:\AMESim\v800\scripting\matlab\amesim
C:\AMESim\v800 \interface\simulink
C:\AMESim\v800 \interface\sl2ame
6、联合仿真
直接采用AMESim里提供的simulink联合仿真demo(help—get AMEsim demo—
interfaces—AMEsimSimulink)检验一下
在AMESim的第三步编译时,总是提示以下错误:
: fatal error U1001: syntax error : illegal character '{' in macro
Stop.
-For free edition of Microsoft Developer Studio, you may need to set the MSSDK environment variable to the installation directory of your MS Windows SDK
System build error!
7、添加补丁(只针对AMESim8.0)关键所在
AMESim8.0与Simulink联合仿真编译不通过,是因为AMESim8.0存在一个bug,安装官方发布的补丁后,就可以解决上述问题,官方补丁见附件。AMESim_8A_patch for Windows.rar
把可执行文件80008_win.exe复制到AMESim 8A的安装目录下,点击执行。会弹出自解压对话窗口,点击extract即可。
如有提示询问是否覆盖同名文件,选择“是”。
三、安装注意事项
1、 Vc++ 建议安装企业版(完全版),不要下载简化版或绿色版,安装时最好是装英文的。
2、Matlab 的安装目录和amesim 的安装目录都不能在中文路径下,而且文件夹的名称不能有空格。如不能是 C:\Program Files (有空格)
3、联合仿真设置成功的标志: 可以运行amesim- 〉HELP- 〉GET AMESIM DEMO-〉interface- 〉amesimsimulink 下的范例
四、仿真时应注意一下事项
1、S-function模块中的参数设置。
S函数名称必须设定为AMESim模型名称加“_ ”形式, 以实现AMESim模型与S
函数的结合。S 函数中的参数是为了规定AMESim模型仿真结果格式而进行设置的。在仿真界面中前两个参数必须进行设置: 第一个参数用于规定是否生成AMESim模型仿真结果文件, “1”代表生成该文件, 其它值代表不生成该文件; 第二个参数用于规定仿真结果文件的采集时间间隔, “0”或负值代表该间隔与Simulink仿真结果文件相同, 若设定值为“″0101”即代表该间隔为″0101 s。
2、选用何种仿真接口的问题
模型中传递的变量数据进行分离。在AMEsim中提供了两种与接口的接口界面:标准界面(Simulink)、联合仿真界面(SimuCosim)。两种接口界面的区别在于采用标准接口界面仿真时,采用中Simulink选定的求解器, 而采用联合仿真界面仿真时, 二者则各自采用各自的求解器,采用标准接口界面仿真时, 模型在中被看作是时间连续模块,而采用联合仿真界面仿真时其被当作时间的离散模块处理, 这使得其与在中建立的模型的控制器十分匹配。所以建议大家选用联合仿真接口(SimuCosim)
3、AMEsim模型和simulink的程序应该放在同一工作目录下。
4、在AMEsim下建模(sketch mode)—编译(parameter mode)—仿真(simulation mode)——然后进入simulink—进行控制器设计—点击”star a simulation”。
(注意,不要在AMEsim下点击。
5、仿真时AMEsim模型不能关闭,因为当关闭模型, 生成的函数将会自动压缩为一个文件, 将不能辨识调用。
五、具体参考一下
1、关于AMEsim8以及更高版本的破解文件下载,可以参考心野的博客(此乃神人,敬佩之至)
https://www.doczj.com/doc/f63655823.html,/torch/MyPosts.html
2、李谨、邓卫华《AMESim与MATLAB_Simulink联合仿真技术及应用》
3、江玲玲, 张俊俊《基于AMESim与Matlab /Simulink联合仿真技术的接口与应用研究》(论文中的安装步骤是错的)
4、视频: AMESim与MATLAB联合仿真设置
https://www.doczj.com/doc/f63655823.html,/v_show/id_XMzI2Nzk0ODEy.html
视频: MATLAB与AMESim联合仿真前期调试
https://www.doczj.com/doc/f63655823.html,/v_show/id_XMzY3NTk2NTUy.html
5、AMESim 8.0和Matlab联合仿真无法编译问题解决方案
https://www.doczj.com/doc/f63655823.html,/forum.php?mod=viewthread&tid=9851&extra=page%3D1 &page=1
竭诚为您提供优质文档/双击可除仓库物流仿真实验心得体会 篇一:物流仿真试验心得报告 物流仿真试验心得报告 (邱碧云09物流二班20xx1040213) 这次实习是通过软件模拟进行的物流试验,以模拟仿真代替实际操作过程. 一.实习目的 这次试验的目的是我们参与物流软件系统在电脑上的 操作,加深对物流流程的了解和掌握,通过理论和实践相结合,培养我们的创新能力,实际操作能力,为步入社会和工作打下扎实的基础.通过乐龙软件,结合实际情况,了解物流中心模型构造,加深对课本理论知识的认识.通过实验实习,切入了解大型企业产品在生产过程中,流水线操作的过程演示和了解,为以后进入企业,在生产流程这一块,对产品分类装卸程序运行和设计打下基础. 通过物流仿真实验实习,我么了解到,物流仿真技术是 借助计算机技术、网络技术和数学手段,采用虚拟现实方法,对物流系统进行实际模仿的一项应用技术。随着物流系统变
得越来越复杂并且内部关联性越来越强,仿真技术日益成为其研究的重要手段。运用计算机仿真技术对现有的生产物流系统的优化或新生产物流系统的设计,不仅可以避免建立物理试验模拟系统的投资,减少设计成本,而且可以通过计算机技术进行精确计算和验证分析,提高系统方案的可行性。根据物流中心的工艺设备参数和工艺流程建立起来的计算 机仿真系统,可以形成直观立体的三维仿真动画,提供生产系统的生产量,确定瓶颈位置,报告资源利用率。还可以被用来支持投资决定,校验物流系统设计的合理性,通过对不同的物流策略进行仿真实验来找出最优解。仿真运行结束后可根据统计数据生成仿真报告,显示各个物流设备的利用率、空闲率、阻塞率等数据。最后根据仿真报告提供的数据对物流系统的优缺点进行判断,做出科学决策。同时物流仿真可以降低整个物流投资成本。 通过指导书,我们知道目前几个应用较多的大型仿真软 件有automod、witness、arena、Flexsim、em-plant、simanimation、showFlow、Ralc等专业仿真软件。我们主要学习了乐龙软件的操作和应用. 二.这次实验实习,我们接触了五个实验,分别是: 1.通过型物流中心(logisticscenter)的模型构筑 其目的是本章通过“通过型物流中心”的例子来学习利用部件生成器、传送带(直线、分流、弯曲)、部件消灭器、
计信学院上机报告 课程名称:配送与配送中心姓名:夏冰山学号:0892110220 指导教师:陈达强班级:物流08乙日期:2010-04-17 一、上机内容及要求: 根据实验三仓储型物流中心模型,在乐龙软件种完成模型的建立; 1.根据模型仿真的结果分析瓶颈的所在; 2.改进模型,再次进行模拟; 二、完成报告(预备知识、步骤、程序框图、程序、思考等): 建立模型:根据实验三的要求建立模型,如图1所示。 模拟条件:时间模式为1:1,其他设备的速度为默认状态。 模型瓶颈: 在模拟运行6分钟后产生瓶颈。由于装货平台出的机械手臂速度过慢,导致货物在传送带上堵塞,影响入库速度。为此我们依次加快了机械手臂的速度,AS/RS水平和垂直方向的速度,瓶颈随着相应设备速度的调整随之转移。但是由于AS/RS堆垛机的最大速度受限,所以加快速度只能够缓解情况,而不能从根本上解除瓶颈。 为此提出解决方案如下: ①如果AS/RS的装货平台和卸货平台在同一侧,将入库申请和出库申请分别排序,第一个出 库作业和第一个入库作业组合为一个联合作业任务,从而缩短存取周期、提高存取效率; ②将AS/RS的装货平台和出货平台分设在仓库的两端,合理考虑入库货位和出货货位的位置, 使得堆垛机在巷道中的运行路径不重复或者重复线路最短; ③增加AS/RS的入库/出库平台数量。 实验感想: 模拟后根据直接观察或者通过日志文件的分析得到瓶颈,眼睛直接看到的瓶颈有时未必是真正的问题所在。例如本次实验,瓶颈直接产生在机械手臂,但是进过分析我们知道真正的瓶颈是AS/RS的堆垛机的速度。所以在寻找瓶颈时不要被假象所误导,随之做出无效的改进方案。
乐龙软件操作实验报告
————————————————————————————————作者:————————————————————————————————日期: 2
合肥学院管理系 《物流系统建模与仿真》 乐龙软件模拟操作 姓名*** 学号***** 班级******* 成绩 2013年4月10日 乐龙物流仿真实验报告
一、实验内容及目的 实验一物流中心(Logistics Center)的模型构筑 通过通过型物流中心的例子来学习利用部件生成器、传送带(直线、分 流、弯曲)、部件消灭器、作业员、笼车等来构筑模型的方法 下面要作成使4种商品从投放口开始在传送带上流动,在分流点根据商品的种类进行分门别类使其按不同分流口流出后作业员把商品装入笼车的模型 实验二仓储型物流中心模型 将以仓储型物流中心的模型为例,学习包括在实验一使用过的设备以及自动立体仓库、装货中转站、卸货中转站、传送带(直角、合流)、机器人托盘供给器等设备来建立模型的方法以及关于这些设备的设定方法建立在上次作成的模型的基础上增加具有自动立体仓库功能的出货传送线的模型。 实验三复合型物流中心模型1(有轨滑车) 以复合型物流中心模型为例,学习如何用包括在上一章利用过的各种设备以及车铁轨、智能导向物、叉车等来建立模型的方法以及关于这些设的设定方法做成由装货机器人将传送过来的4种货物堆放到托盘后,装货托盘由滑车铁轨向3个自动立体仓库分送,并且将从自动立体仓库出库的托盘由滑车铁轨向出货场地搬送,再由叉车向出货口搬运的货物的模型 实验四复合型物流中心2(双层) 将以复合型物流中心模型Ⅱ为例,学习如何用包括在实验三利用过的各种设备以及轨道、卸货中转站、左曲传送带、智能作业员等建立模型的方法。 做成的模型概要是轨道上的平板车把从自动立体仓库第2层部分出库的托盘搬送到指定的出口并把作业员在卸货中转站卸货后的空托盘再运回仓库。卸下的货物在分流点根据其目的地被分流后作业员将其装入对应的笼车内。 二、实验环境: 管理系物流管理实验室,上机操作,并且根据老师给出的提示,说明文档对乐龙软件来进行实验操作 三、实验步骤及结果: 实验项目一物流中心(Logistics Center)的模型
第18章宇龙数控车床仿真软件的操作 本章将主要介绍上海宇龙数控仿真软件车床的基本操作,在这一章节中主要以FANUC 0I和SIEMENS 802S数控系统为例来说明车床操控面板按钮功能、MDA键盘使用和数控加工操作区的设置。通过本章的学习将使大家熟悉在宇龙仿真软件中以上两个数控系统的基本操作,掌握机床操作的基本原理,具备宇龙仿真软件中其它数控车床的自学能力。 就机床操作本身而言,数控车床和铣床之间并没有本质的区别。因此如果大家真正搞清楚编程和机床操作的的一些基本理论,就完全可以将机床操作和编程统一起来,而不必过分区分是什么数控系统、什么类型的机床。 在编程中一个非常重要的理论就是在编程时采用工件坐标值进行编程,而不会采用机床坐标系编程,原因有二:其一机床原点虽然客观存在,但编程如果采用机床坐标值编程,刀位点在机床坐标系中的坐标无法计算;其二即使能得到刀位点在机床坐标系的坐标,进而采用机床坐标值进行编程,程序是非常具有局限性的,因为如果工件装夹的位置和上次的位置不同,程序就失效了。实际的做法是为了编程方便计算刀位点的坐标,在工件上选择一个已知点,将这个点作为计算刀位点的坐标基准,称为工件坐标系原点。但数控机床最终控制加工位置是通过机床坐标位置来实现的,因为机床原点是固定不变的,编程原点的位置是可变的。如果告诉一个坐标,而且这个是机床坐标,那么这个坐标表示的空间位置永远是同一个点,与编程原点的位置、操作机床的人都没有任何关系;相反如果这个坐标是工件坐标值,那么它的位置与编程原点位置有关,要确定该点的位置就必须先确定编程原点的位置,没有编程原点,工件坐标值没有任何意义。编程原点变化,这个坐标值所表示的空间位置也变化了,这在机床位置控制中是肯定不行的,所以在数控机床中是通过机床坐标值来控制位置。为了编程方便程序中采用了工件坐标值,为了加工位置的控制需要机床坐标值,因此需要将程序中的工件坐标转换成对应点的机床坐标值,而前提条件就是知道编程原点在机床中的位置,有了编程原点在机床坐标系中的坐标,就可以将工件坐标值转换成机床坐标值完成加工位置的控制,解决的方法就是通过对刀计算出编程原点在机床坐标系中的坐标。程序执行时实际上做了一个后台的工作,就是根据编程原点的机床坐标和刀位点在工件坐标系中的坐标计算出对应的机床坐标,然后才加工到对应的机床位置。 这是关于编程的最基本理论,所有轮廓加工的数控机床在编程时都采用这样的理论,无论铣床、车床、加工中心等类型的机床,还是FANUC、SIEMENS、华中数控、广州数控等数控系统,数控机床都必须要对刀,原理都是完全相同的,而对刀设置工件坐标系或刀补则是机床操作中的核心内容,如果大家搞清楚这些理论对机床操作将十分具有指导意义。 18.1 实训目的 本章主要使大家了解宇龙仿真软件车床的基本操作,熟悉并掌握FANUC 0I数控车床的操作界面,在此基础上过渡并熟悉SIEMENS 802S数控车床的界面和操作。 18.2 FANUC 0i数控车床
商学院 学生实验报告 课程名称:仓储与配送实验学生:专业班级:学生学号: 指导教师: 2013 - 2014 学年第 1 学期 经济管理实验教学中心制
实验报告书写要求 实验报告原则上要求学生手写,要求书写工整。若因课程特点需打印的,要遵照以下字体、字号、间距等的具体要求。纸一律采用A4的纸。 实验报告书写说明 实验报告中一至四项容为必填项,包括实验目的和要求;实验环境与条件;实验容;实验报告。各专业可根据学科特点和实验具体要求增加项目。 填写注意事项 (1)细致观察,及时、准确、如实记录。 (2)准确说明,层次清晰。 (3)尽量采用专用术语来说明事物。 (4)外文、符号、公式要准确,应使用统一规定的名词和符号。 (5)实验报告中所引用的表格、图片,应设置标注,并提供不少于100字的文字描述。 (6)字体选用小四号宋体,设置1.5倍行间距。 (7)应独立完成实验报告的书写,严禁抄袭、复印,一经发现,以零分论处。 实验报告批改说明 实验报告的批改要及时、认真、仔细,一律用红色笔批改。实验报告的批改成绩采用百分制,具体评分标准根据实验教学大纲由任课教师自行制定。 实验报告装订要求 实验报告批改完毕后,任课老师将每门课程的每个实验项目的实验报告以自然班为单位、按学号升序排列,装订成册,并附上一份该门课程的实验大纲、二份教务系统打印的成绩登记表、一份考勤表。
一、实验目的和要求 目的:通过本实验教学,培养学生的仓储及配送管理技能和应用技能。学生在实验过程中,通过对模拟软件的使用,提高对仓储管理实践的认识,加强对作业仓储过程的了解,体会配送业务流程的运作,掌握企业仓储和配送管理的核心思想和相关业务流程。 要求:通过实验要求学生掌握仓储和配送系统中设备的种类、选择依据和操作方法:掌握仓库位编码方法;掌握仓库的入库、出库作业流程;出库作业时间测定和配送车辆等候装车的排队模型寻优;采用路径节约法实现配送路线的优化。 二、实验环境与条件 微型计算机、《仓储与配送》软件 三、实验容 1. 基本课程练习 2. 分组岗位轮换 3. 仓储企业和设施参观
物流配送中心与运作管理课程实验实验报告 学院: 交通运输与物流学院 专业年级: 08级物流工程 姓名学号: 菊花大婶 课程: 配送中心规划与运作管理 2011 年 10月 26 日
一 .实验名称:仓储型物流中心仿真 二 .试验时间:2011年10月 三 .软件环境:乐龙物流仿真软件 四 .试验内容: 1 实验就绪阶段截图 2试验运行阶段截图 3 货物出入库流程介绍: 货物经过输送机输送至机器手处,机器手把货物送至装货平台,在其上将货物送至铁轨滑车,并将托盘收集处理,铁轨滑车将货物送至卸货平台1卸货平台再将货物送入仓库,进行储存,最后仓储的巷道堆垛机将货物送至装货平台,在经过卸货平台送至铁轨滑车,将货物送至输送带,输送带将货物输送至作业人员处并将货物取走,脱离输送系统,并将托盘收集处理。 3-1 货物始发设备——部件发生器:如下图所示,包括概要、尺寸、要素/控制、
色/形和图层/层面项,此处设置的主要是概要中的条形码、时间间隔以及尺寸中关于发生器外观的设置,用于模拟产生实验所需部件内容,在设置时注意如若需要可按不同颜色、形状和大小来生成实验部件以示区分,其中在概要栏的条码选项用来配合之后的分拣制定相应的地点。 3-2 3-3 货物运送流通及其周边设备——主要经过输送带、机械手臂、装货平台、铁轨滑车及其in/out部件、立体仓库及其in/out部件、卸货平台、输送带直至最终的笼车。并且按照如图所示的关系将前后的设备进行连接和排布。 在此过程中的属性设置注意事项: ①输送带在分流处的箭头走向须一致高度和宽度尺寸前后的应该一致. ②铁轨滑车处的靠近装货平台的in部件连接装货平台且形成装货平台→智能导向物→铁轨滑车in部件的三角连接,且在进行智能导向物设置时,在其RULE IF栏共有三个规
组态软件实验报告 专业:电气工程及其自动化 班级: 学号: 姓名:
实验一组态软件概念介绍 实验目的: 介绍组态软件的基本概念应用背景。 介绍组态软件的软件系统结构和功能特点。 认识和比较各个公司组态软件的特点。 以讲述的方式让学生了解组态软件,知道组态软件的由来,组态软件的应用背景,和相关技术特点,从概念上对软件有个初步的认识。 实验内容: 1、介绍组态的概念; 2、计算机监督与控制系统的概念; 3、工控机的特点; 4、原始组态软件和当前组态软件的区别和优缺点; 5、组态软件的基本特性整体结构; 6、介绍各公司组态软件的特点。 实验二软件安装与认知 实验目的: 学习组态软件的安装; 学习组态软件各模块的功能; 区别开发环境和运行环境的操作。 由于组态软件的编程方式是面向对象的方法,以事件触发软件的相关动作。基本操作的熟悉让学生对组态软件运行原理有初步的认识。 实验内容: 1、安装图灵开物组态软件。 2、了解单机版功能与网络版功能的区别。 3、运行演示工程。 4、学习软件界面的功能及基本操作。 实验结果:
实验三工程建立 实验目的: 通过本次实验让学生学习怎么建立一个组态软件工程,建立的各个元素,对应了实际现场的哪些操作,重要的是记住建立工程中的一些关键性步骤。 实验内容: 1、新建组态软件工程。 2、新建计算机节点,了解节点中各功能的含义及配置方法。
3、新建设备,了解组态软件功能设备及驱动的应用方法。 4、新建图页,图页是组态软件界面图形绘制区域。 5、新建标签,了解标签的类型及各种属性,以及标签在工程中作用的区域。实验结果:
《电子技术Ⅱ课程设计》 报告 姓名 xxx 学号 院系自动控制与机械工程学院 班级 指导教师 2014 年 6 月18日
目录 1、目的和意义 (3) 2、任务和要求 (3) 3、基础性电路的Multisim仿真 (4) 3.1 半导体器件的Multisim仿真 (4) 3.11仿真 (4) 3.12结果分析 (4) 3.2单管共射放大电路的Multisim仿真 (5) 3.21理论计算 (7) 3.21仿真 (7) 3.23结果分析 (8) 3.3差分放大电路的Multisim仿真 (8) 3.31理论计算 (9) 3.32仿真 (9) 3.33结果分析 (9) 3.4两级反馈放大电路的Multisim仿真 (9) 3.41理论分析 (11) 3.42仿真 (12) 3.5集成运算放大电路的Multisim仿真(积分电路) (12) 3.51理论分析 (13) 3.52仿真 (14) 3.6波形发生电路的Multisim仿真(三角波与方波发生器) (14) 3.61理论分析 (14) 3.62仿真 (14) 4.无源滤波器的设计 (14) 5.总结 (18) 6.参考文献 (19)
一、目的和意义 该课程设计是在完成《电子技术2》的理论教学之后安排的一个实践教学环节.课程设计的目的是让学生掌握电子电路计算机辅助分析与设计的基本知识和基本方法,培养学生的综合知识应用能力和实践能力,为今后从事本专业相关工程技术工作打下基础。这一环节有利于培养学生分析问题,解决问题的能力,提高学生全局考虑问题、应用课程知识的能力,对培养和造就应用型工程技术人才将能起到较大的促进作用。 二、任务和要求 本次课程设计的任务是在教师的指导下,学习Multisim仿真软件的使用方法,分析和设计完成电路的设计和仿真。完成该次课程设计后,学生应该达到以下要求: 1、巩固和加深对《电子技术2》课程知识的理解; 2、会根据课题需要选学参考书籍、查阅手册和文献资料; 3、掌握仿真软件Multisim的使用方法; 4、掌握简单模拟电路的设计、仿真方法; 5、按课程设计任务书的要求撰写课程设计报告,课程设计报告能正确反映设计和仿真结果。
物流乐龙R a L C-B r a i n仿真软件实验指导书
RaLC‐Brain教程2 上海乐龙人工智能软件有限公司
RaLC-Brain 教程2 -作业员分拣货物模型 在本章主使用菜单栏上的作业管理器菜单和作业管理器关联设备菜单中的各种作业管理器、管理批处理设备、设定初始库存设备等构筑模型。 此模型中先建立入库部分并确认运行无误后再建立出库部分。 1.模型解说 在此模型中,作业员把1层左侧的卡车卸下的货物拿到暂存区装托盘,然后托盘通过电梯被存放到2层货架上(货物进库)。根据需要进行分拣作业后,作业员把货物放到传送带,通过传送带送到1层,然后货物按目的地分别被装载到相应的卡车上(货物出库)。
2.建立模型 启动RaLC-Brain3.5,点击新建按钮,使新画面表示出来。 ●模型货物入库部分 货物装托盘后通过电梯搬送到2层,存放到相应的货库里。 〈入库流程全图〉 点击菜单栏的[作业管理器关联设备]中的[入库货品生成器(卡车入库)],使入库物品生成器表示出来。
打开入库货品生成器的属性窗口,在概要属性里把名称改成〈Berth01〉,单击[OK]按钮。此名称将成为入库XML文件的OrderSubDevice。 点击设备栏的[直线传送带],使直线传送带表示出来。选择直线传送带的弹出菜 单 中的[逆时针旋转90度旋转],将其设置于入库物品生成器的左侧。双击入库物品生成器 会有红线表示出来,用此红线连接上直线传送带。
从菜单栏的[作业管理器关联设备]菜单选择[暂存区],使暂存区表示出来。点击[顺时针90度旋转],使暂存区的白线面向传送带。 打开暂存区的属性窗口,在尺寸项目把长度和宽度改成〈1500〉。
Tutorial 5 实验报告 实验名称:Matlab 绘图操作 实验目的: 1、 掌握绘制二维图形的常用函数; 2、 掌握绘制三维图形的常用函数; 3、 掌握绘制图形的辅助操作。 实验内容: 1. 设sin .cos x y x x ?? =+ ??+?? 23051,在x=0~2π区间取101点,绘制函数的曲线。 2. 已知: y x =21,cos()y x =22,y y y =?312,完成下列操作: (1) 在同一坐标系下用不同的颜色和线性绘制三条曲线; (2) 以子图形式绘制三条曲线; (3) 分别用条形图、阶梯图、杆图和填充图绘制三条曲线。 3. 已知:ln(x y x x ≤=??+>??0102 ,在x -≤≤55区间绘制函数曲线。 4. 绘制极坐标曲线sin()a b n ρθ=+,并分析参数a 、b 、n 对曲线形状的影响。 5.在xy 平面内选择区域[][],,-?-8888, 绘制函数z =的三种三维曲面图。 6. 用plot 函数绘制下面分段函数的曲线。 ,(),,x x f x x x x ?+>? ==??+
8. 在同一坐标轴中绘制下列两条曲线。 (1).y x =-205 (2)sin()cos ,sin()sin x t t t y t t π=?≤≤? =?303 实验结果: 1. 2. (1)
(2)
(3)
Multisim10仿真软件简介与使用 Multisim10.0是加拿大交互图像技术公司推出的最新电子仿真软件,是Multisim系列的改进版。该版使文件管理和操作更方便,元件调用更便捷,元件的标注更加直观实用,增加了仿真的真实感,使虚拟的电子实验平台更加接近实际的实验平台。Multisim10.0是一种在电子技术界广为应用的优秀计算机仿真设计软件,被誉为“计算机里的电子实验室”。 1.Multisim10.0的基本操作界面 Multisim10.0软件以图形界面为主,具有一般Windows应用软件的风格,可以使用户自如使用。启动Multisim10.0后,出现如图3-4-1界面。 仪器仪表栏菜单栏工具栏 仿真电源开关元器件栏 状态栏 电路工作区 图3-4-1 主界面窗口 (1)菜单栏 Multisim10.0的菜单包括主菜单、一级菜单和二级菜单,通过菜单可以对Multisim10.0的所有功能进行操作。如图3-4-2所示。 图3-4-2 主菜单 (2)工具栏 Multisim10.0提供了多种工具栏,如系统工具栏、主工具栏、元件工具栏、仪表工具栏。 ①系统工具栏提供了文档常用的新建文件、打开文件、保存文件、打印、放大、缩 小等操作。如图3-4-3所示。 图3-4-3 系统工具栏 ②元件工具栏提供了从Multisim元件数据库中选择、放置元件到原理图中的按钮。如图3-4-4所示。从左到右元件库依次为电源库、基本元件库、二极管库、晶体管库、模拟元件库、TTL库、CMOS库、其它数字元件库、数模混合元件库、指示器库、电源器件库、混合项元件库、高级的外设器件库、射频元件库、电气元件库、MCU器件库、设置层次库、放置总线库。
第一章软件设置 在进行仿真之前,建议完成培训阶段的DELMIA option设置(参考文件1-Option.pdf); 第二章仿真流程 2.12D布局图导入 1、AutoCAD布局图纸导入DELMIA:AutoCAD的零点坐标系与DELMIA一致,为保证导入的布局图在DELMIA原点附近,建议将CAD图纸导入之前进行偏移,选取某一点作为布局图的参考;如下图,选择布局图左下角为0,0位置; 2、偏移之后保存成较低版本dwg文件(如AutoCAD 2007),直接在DELMIA中打开,File->Open,然后保存成*.CATDrawing文件备用 3、选择进入DELMIA->AEC Plant->Plant Layout模块,如下图所示,建立一Area对象,保存;
4、切换至DELMIA->Resource Detailing->Resource Layout模块,创建Area对象的Foot Print; 勾选“show Footprint”选型,OK。 5、同时打开布局图,点击“Attach Drafting View”,按照图示顺序选择对象,布局图关联到 DELMIA环境;
将Product文件保存,然后插入到Resource节点; 备注:为了后续方便机器人和设备精确布局,可以结合CATIA草图模块,选取布局图机器人基座中心点,创建一组圆柱特征; 2.2机器人模型导入 根据布局图,切换至DELMIA->Resource Detailing->Device Task Definition模块,选择catalog方 式选择机器人型号并插入机器人模型,通过Snap命令将机器人精确定位;
物流仿真实验心得体会 篇一:物流仿真实验实训报告 《物流规划与设计》 课程实验报告 实验报告题目:仿真实验学院名称:交通与物流学院专业:港口管理班级:港口09-1班姓名:学号:成绩: 《物流规划与设计》仿真实验报告 一、实验名称 物流仿真模拟实习 二、实验目的 1、掌握仿真软件Flexsim的操作和应用,熟悉通过软件进行物流仿真建模。 2、记录Flexsim软件仿真模拟的过程,得出仿真的结果。 3、总结Flexsim仿真软件学习过程中的感受和收获。 三、实验设备 PC机,Windows XP,Flexsim教学版 四、实验步骤 实验一 1、从库里拖出一个发生器放到正投影视图中,如图1所示:
图1 2、把其余的实体拖到正投影视图视窗中,如图2所示: 1 / 9 图2 3、连接端口 连接过程是:按住“A”键,然后用鼠标左键点击发生器并拖曳到暂存区,再释放鼠标键。拖曳时你将看到一条黄线,释放时变为黑线。 图3 4、根据对实体行为特性的要求改变不同实体的参数。我们首先从发生器开始设置,最后到吸收器结束。 指定到达速率、设定临时实体类型和颜色、设定暂存区容量、为暂存区指定临时实体流选项、为处理器指定操作时间 5、重置,编译,运行得到如下图所示: 2 / 9 6、保存模型。 实验二 1、装载模型1并编译 2、向模型中添加一个分配器和两个操作员 3 / 9 3、连接中间和输入/输出端口 4、xx暂存区临时实体流设置使用操作员
4 / 9 篇二:物流仿真试验心得报告 物流仿真试验心得报告 (邱碧云 09物流二班 20XX1040213) 这次实习是通过软件模拟进行的物流试验,以模拟仿真代替实际操作过程. 一. 实习目的 这次试验的目的是我们参与物流软件系统在电脑上的操作,加深对物流流程的了解和掌握,通过理论和实践相结合,培养我们的创新能力,实际操作能力,为步入社会和工作打下扎实的基础.通过乐龙软件,结合实际情况,了解物流中心模型构造,加深对课本理论知识的认识.通过实验实习,切入了解大型企业产品在生产过程中,流水线操作的过程演示和了解,为以后进入企业,在生产流程这一块,对产品分类装卸程序运行和设计打下基础. 通过物流仿真实验实习,我么了解到, 物流仿真技术是借助计算机技术、网络技术和数学手段,采用虚拟现实方法,对物流系统进行实际模仿的一项应用技术。随着物流系统变得越来越复杂并且内部关联性越来越强,仿真技术日益成为其研究的重要手段。运用计算机仿真技术对现有的生产物流系统的优化或新生产物流系统的设计,不仅可以避免建立物理试验模拟系统的投资,减少设计成本,而且可以通过计算
实验一Linux基本操作 一.实验目的: 1. 二.实验环境: 虚拟机+Red Hat Enterprise Server 5.0 三.实验内容: 根据以下的文字提示,调用相应的命令来完成,记录相应的运行结果。一)用户和组基本操作 1.添加一个user01用户,家目录为/home/sub2,并设置密码 2.添加一个group1 组 3.将user01用户添加到group1组中 4.修改group1组名称为group2 5.修改user01的家目录为/home/user01 6.判断/etc/password这个目录是否包含user01这个用户 7.修改user01的shell为/bin/tcsh 8.添加一个group3组,把user01和root用户都添加到该组
https://www.doczj.com/doc/f63655823.html,er01用户从group2组切换到group3组 10.设置user01的密码在2012-5-20过期 11.把/home/user01目录所属的组修改为group3 12.删除user01帐号 13.查看内核版本号 二)进程管理 1.运行cat命令:vi test,输入若干字符如this is a example,挂起vi进程 2.显示当前所有作业 3.将vi进程调度到前台运行
4.将vi进程调度到后台并分别用kill/pkill/killall命令结束该该进程。 三)磁盘管理 1.通过fdisk 将为硬盘增加一个分区(主分区或者逻辑分区)。 2.并格式化ext3系统,
3.检测分区是否有坏道 4.检测分区的完整性 5.加载分区到/mnt目录(或者其他分区)下,并拷贝一些文件到该目录下 6.(选做)为test用户设置磁盘配额(软限制和硬限制参数自行设定) 7.退出/mnt目录后卸载该分区 8.用du查看/usr目录的大小
FANUC数控铣床仿真实验报告 一、试验目的: 1.掌握手工编程的编程步骤 2.掌握数控加工仿真系统的操作流程。 二、实验内容 1. 了解数控仿真软件的应用背景。 2. 掌握手工编程的编程步 3.掌握数控加工仿真系统的操作流程。 三、实验设备数控加工仿真软件 四、实验操作步骤: 数控铣床床训练零件尺寸(零件厚度为3mm)图 技术要求:零件毛坯为150mm*100mm*20mm,材料为低碳钢。
1.程序编制: 2.打开数控仿真软件 直接选择“快速登陆”(用户名:guest 密码:guest)3.进入仿真系统 1、选择合适的机床
2、回零 3、将所编完的程序导入 4、检查程序 看轨迹 选择合适的坐标 (同FANUC数控车床步骤)
5、装工件、刀具 定义毛坯 选择夹具
放置零件 装刀 6、对刀 将刀具调整到合适位置,先对X方向。刀具移至工件的左端、底部(留有一定的间隙)“塞尺检查”——选择1mm的塞尺 用JOG和HANDLE按钮,调整大小,直至刀具碰到塞尺,显示“合适”,记下X坐标-578.000。“塞尺检查”——收回塞尺。调整刀具和工件位置,对Y方向对刀。刀具移至工件前端、中间(留有一定间隙) “塞尺检查”——选择1mm的塞尺
用JOG和HANDLE按钮,调整大小,直至刀具碰到塞尺,显示“合适”,记下Y坐标-468.000。 “塞尺检查”——收回塞尺。调整刀具和工件位置,对Z方向对刀。刀具移至工件上端、中间(留有一定间隙) “塞尺检查”——选择1mm的塞尺 用JOG和HANDLE按钮,调整大小,直至刀具碰到塞尺,显示“合适”,记下Z坐标-412.000。“塞尺检查”——收回塞尺。 将X坐标-578.000-1(塞尺厚度)-2(刀具半径)-75(工件中心)=-656.000 将Y坐标-468.000+1(塞尺厚度)+2(刀具半径)+50(工件中心)=-415.000 将Z坐标-414.000-1(塞尺厚度)-2(刀具半径)=-415.000 将X、Y、Z的数值写入G54中 按一下,写入刀具直径 再按两下,写入G54的值
篇一:物流管理模拟实验报告 《物流管理模拟实验》 实习报告 班级: 组(企业)号: 姓名: 学号:电子商务1001班 no. xx 1002110105 目录 1、概述 (3) 1.1实习目的 ............................................................................. (3) 1.2实习手段 ............................................................................. (3) 1.3实习进程安排 ............................................................................. (3) 1.4实习原理 ............................................................................. (3) 1.5实习平台 ............................................................................. .. (3) 2、实习过程及实习内容 ............................................................................. (3) 2.1实习主要阶段性工作安排 ............................................................................. . (3) (1)实习准备 ............................................................................. .. (3) (2)第一阶段 ............................................................................. . (3) (3)第二阶段 ............................................................................. . (4) (4)第三阶段 ............................................................................. . (4) (5)第四阶
Altium-Designer-软件使用练习-实验报告
实验报告 课程名称:电工电子工程训练 指导老师:熊素铭 成绩: __________________ 实验名称:Altium Designer 软件使用练习 实验类型:弱电 同组学生姓名:__________ 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 一、实验目的 1.深入学习Altium Designer 软件的基本操作 2.学习利用Altium Designer 软件绘制电路原理图 3.学习利用Altium Designer 软件绘制印刷电路图 4.设计直流稳压电源的电路原理图 5.设计汽车转弯闪光指示灯电路原理图 6.以汽车转弯闪光指示灯原理图设计相应PCB 图 二、实验内容和原理 专业:自动化 (电气) 姓名:冷嘉昱
1.在Altium Designer 软件上画出直流稳压电源电路原理图(见图1)。 ①工作原理 降压变压器T1的原边绕组接交流220V,副边绕组中间有抽头,为二组交流15V输出,D1和电容C1、C2组成桥式整流和电容滤波电路。在电容器C1、C2两端有18V左右不稳定的直流电压,经三端集成稳压器稳压,在7812集成稳压器输出端有+12V的稳定直流电压输出,在7912集成稳压器输出端有-12V的稳定直流电压输出。该电路可用作为集成运算放大器电路、OCL 功率放大电路的电源。 C3、C4用来防止电路自激振荡。C5、C6用来改善负载瞬态响应,防止负载变化时,输出电压产生较大的变动。D4、D5是发光二极管,用以防止当集成稳压器输入端短路时,因电容器C5、C6放电而损坏集成稳压器。 ②元器件选择 变压器T选用额定功率为20W、输出二组交流15V 的电源变压器。D1采用桥堆整流二极管。三端集成稳压器7812、7912采用S-7型封装,外加散热器。C1、C2为2200μF/25V电解电容。C3、C4可采用独石电容。C5、C6采用100pF/15V电解电容。D2、D3采用二极
Multisim7仿真分析命令介绍 1. 直流工作点分析(DC Operating Point Analysis) 直流工作点分析是对电路进行直流分析,分析完毕后给出电路中所有结点的电压和所有直流电压源中的电流。 进行直流工作点分析时,系统会自动假定电路的交流信号为0,且电路中的电容开路,电感短路。 以单管共射放大电路为例介绍如何用直流工作点分析得到电路中部分结点的电压和流过元器件内部结点的电流。 单管共射放大电路 (1)电路结点标注 点击主菜单Options->Preferences,选中circuit页show区中,点击OK按钮返回电路图窗口。
Preferences窗口的Circuit页 (2)仿真方式选择 点击主菜单Simulate->Analysis-> DC Operating Point Analysis。 DC Operating Point Analysis窗口
(3)输出变量选择 Output Variables页用来选定输出分析的变量。 在DC Operating Point Analysis窗口的Output variables页窗口中,左边Variables in circuit区中给出了针对电路中已标注的所有结点,该分析方法能够分析计算的所有变量。可以通过选中需要分析计算的变量点击Add的方法将想要观测的变量添加到右边Select variables for区中,用于软件后台的分析计算。 选择输出变量 其中,$1表示结点1的电压,vv2#branch表示流经电源V2的电流。(4)内部结点添加 有些情况下,元器件有内部结点的存在(如:三极管),若想分析计算元器件内部结点的电流电压参数,可选择左边Variables in circuit区下边的 ,在more options中选择添加元器件模型和想要分析计算的参数。
乐龙仿真软件实训三 ——智能导向物的其它运作规则的作成 1、利用智能导向物实现以下三种方式 1)模型开始运转后,请观察货物沿着3条传送带依次流动的情景。123——321 2)模型开始运转后,请观察首先在最远处的传送带上投放货物,当达到满载状态后才在中间的传送带上投放,中间传送带到达满载状态后在最近的传送带上投放情景。 123——321 3)模型开始运作后,请观察最初货物依次向各传送带投放,当按顺序将要被投放货物的传送带到达满载状态后,向有空间的传送带(正中间的传送带)投放货物的情景。 2——1——3
2、讲解:此上三种方式关键是用到了智能导向物的属性设置 1)CYCLIC_STRICT 《CYCLIC_STRICT 》是指按顺序(按照和智能导向物连接的顺序,在范例中是从最远 处的传送带到正中间的再到最近的的顺序)向各传送带一个接一个地投放货物的方法。当 当前该被投放的传送带达到极限(不能再投放的饱和状态)后,如果该设备不出现空位的话 就会一直处于停止投放的状态。 2)CYCLIC_FIRST_FREE 《CYCLIC_FIRST_FREE 》是指在投放货物时,按连接的顺序首先有空位的设备(传送 带等)上投放货物,当该设备达到满载状态时才向下一个设备投放货物的方法。 3)CYCLIC_NEXT_FREE 《CYCLIC_NEXT_FREE 》是指按顺序向各传送带一个接一个地投放货物的方法。当下一 个该被投放的传送带达到满载状态,如果其它设备存在空间的话则向有空间的设备上投 放货物。 3、思考:
1、实现两种货物相隔进行输送 、实现两种货物相隔5个进行输送 3、实现三种货物相隔3个进行输送
XX大学 软件技术基础 实验报告 姓名:xx 班级:自动化1105 学号:xx 成绩: 2013年11月05 日
实验一 vc++6.0基本环境与应用 实验题目:熟悉vc++6.0的实验环境 实验目的:掌握建立vc工程的方法,并学会编写简单的vc程序。 实验内容: 1,熟悉vc++界面。 启动VC++ 6.0中文版以后,屏幕上显示如图所示的开发环境。开发环境界面由标题栏、菜单栏、工具栏、项目工作区窗口、文档窗口、输出窗口及状态栏组成。每个窗口左上角均有最小化、最大化(还原)和关闭按钮。各类窗口相互独立,可进行打开、关闭、移动、极大、极小化控制以及改变窗口大小。 2 建立MFC应用程序 建一个VC++的MFC应用程序的过程可分为5个步骤: (1)创建项目
使用Files菜单下的“New”项,会弹出一个New的对话框,选中Projects 选项卡,对话框会列出一系列可以创建的项目类型(见图4.),下列出部分常用类型: ATL COM AppWizard(创建ATL应用程序) Custom AppWizard(创建自定义的应用程序) Database Project(创建数据库) DevStudio Add-in Wizard(创建自定义宏) ISAPI Extension Wizard(创建Internet服务器或过滤器) Makefile(创建Make文件) MFC AppWizard(dll)(创建MFC动态链接库) MFC AppWizard(exe)(创建MFC可执行程序) MFC AxtiveX ControlWizard(创建MFC控件程序) Win32 Dynamic Link Library(创建Win32动态链接库) Win32 Application(创建Win32程序) Win32 Console Application(创建Win32控制台程序)
电子电路仿真应用手册 2009年6月 前言 本手册基于Multisim V7仿真环境,从最基本的仿真电路图的建立开始,结合实际的例子,对模拟和数字电路中常用的测试方法进行介绍。这些应用示例包括:常用半导体器件特性曲线的测试、放大电路静态工作点和动态参数的测试、电压传输特性的测试、波形上升时间的测试、逻辑函数的转换与化简、逻辑分析仪的使用方法等。 更高版本的Multisim仿真环境与之类似。此外,本手册侧重于测试方法的介绍,仅对主要步骤进行说明,如碰到更细节的问题,可参阅《Multisim V7教学版使用说明书》或其它帮助文档。 目录 1 Multisim主界面简介 (2) 2仿真电路图的建立 (2) 3常用半导体器件特性曲线的测试方法 (3) 3.1 晶体三极管特性曲线的测试 (3) 3.1.1 IV分析仪测试方法 (3) 3.1.2 直流扫描分析方法 (3) 3.2 结型场效应管特性曲线的测试 (4) 3.2.1 IV分析仪测试方法 (4) 3.2.2 直流扫描分析方法 (4) 3.3 二极管、稳压管伏安特性曲线的测试 (5) 4放大电路静态工作点的测试方法 (5) 4.1 虚拟仪器测试方法 (5) 4.2 静态工作点分析方法 (5) 5放大电路动态参数的测试方法 (6) 5.1 电压放大倍数的测试 (6) 5.1.1瞬态分析测试方法 (6) 5.1.2虚拟仪器测试方法 (6) 5.2 输入电阻的测试 (6) 5.3 输出电阻的测试 (7) 5.4频率响应的测试 (7) 5.4.1交流分析方法 (7) 5.4.2 波特图仪测试方法 (7) 6电压传输特性的测试方法 (8) 7上升时间的测试方法 (9) 8逻辑函数的转换与化简 (10) 8.1 逻辑函数转换为真值表 (10) 8.2 真值表转换为逻辑函数 (10) 9逻辑分析仪的使用方法 (11)