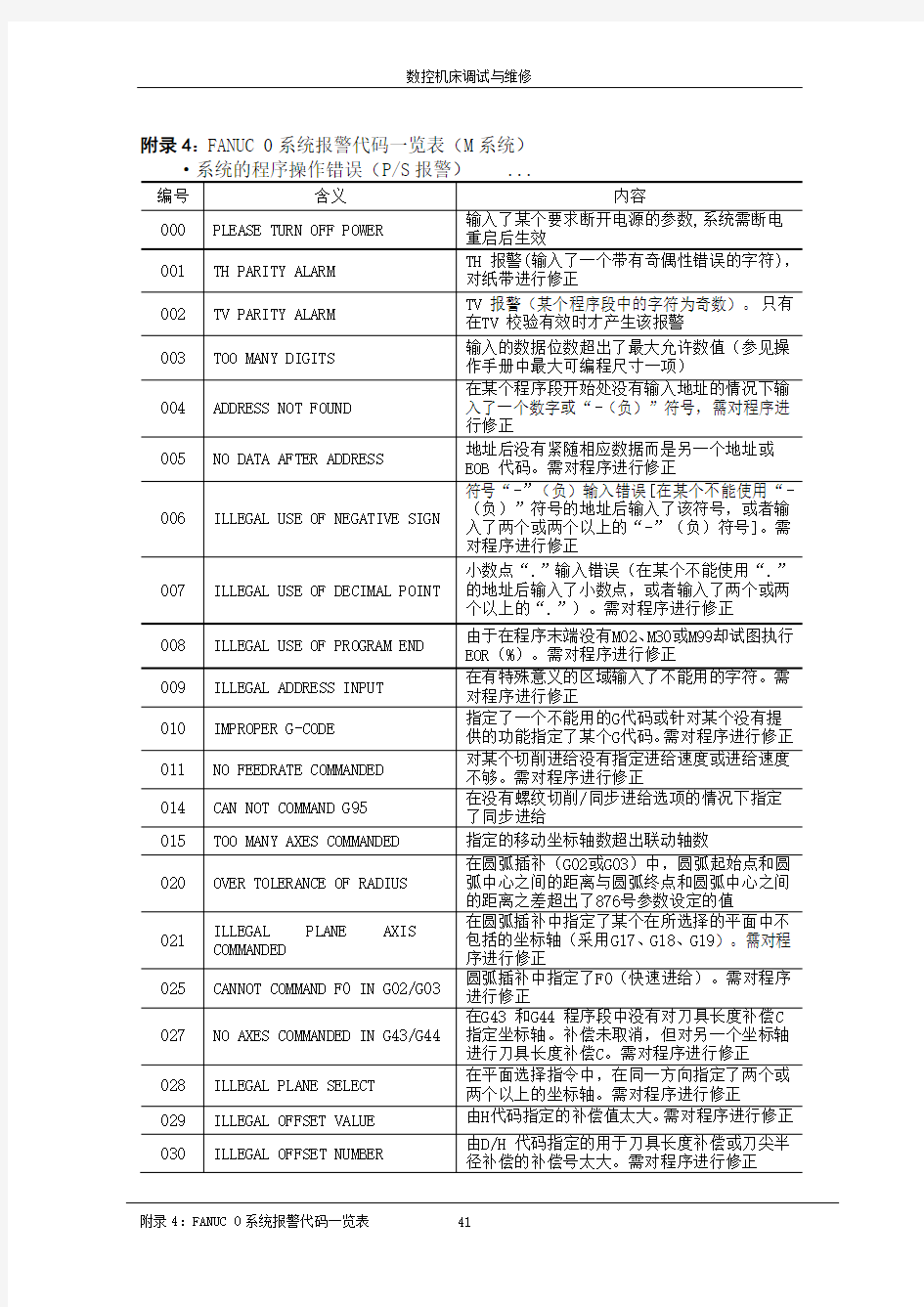
附录4:FANUC 0系统报警代码一览表(M系统)
·系统的程序操作错误(P/S报警) ...
编号含义内容
000 PLEASE TURN OFF POWER 输入了某个要求断开电源的参数,系统需断电重启后生效
001 TH PARITY ALARM TH 报警(输入了一个带有奇偶性错误的字符),对纸带进行修正
002 TV PARITY ALARM TV 报警(某个程序段中的字符为奇数)。只有在TV 校验有效时才产生该报警
003 TOO MANY DIGITS 输入的数据位数超出了最大允许数值(参见操作手册中最大可编程尺寸一项)
004 ADDRESS NOT FOUND 在某个程序段开始处没有输入地址的情况下输入了一个数字或“-(负)”符号,需对程序进行修正
005 NO DATA AFTER ADDRESS 地址后没有紧随相应数据而是另一个地址或EOB 代码。需对程序进行修正
006 ILLEGAL USE OF NEGATIVE SIGN 符号“-”(负)输入错误[在某个不能使用“-(负)”符号的地址后输入了该符号,或者输入了两个或两个以上的“-”(负)符号]。需对程序进行修正
007 ILLEGAL USE OF DECIMAL POINT 小数点“.”输入错误(在某个不能使用“.”的地址后输入了小数点,或者输入了两个或两个以上的“.”)。需对程序进行修正
008 ILLEGAL USE OF PROGRAM END 由于在程序末端没有M02、M30或M99却试图执行EOR(%)。需对程序进行修正
009 ILLEGAL ADDRESS INPUT 在有特殊意义的区域输入了不能用的字符。需对程序进行修正
010 IMPROPER G-CODE 指定了一个不能用的G代码或针对某个没有提供的功能指定了某个G代码。需对程序进行修正
011 NO FEEDRATE COMMANDED 对某个切削进给没有指定进给速度或进给速度不够。需对程序进行修正
014 CAN NOT COMMAND G95 在没有螺纹切削/同步进给选项的情况下指定了同步进给
015 TOO MANY AXES COMMANDED 指定的移动坐标轴数超出联动轴数
020 OVER TOLERANCE OF RADIUS 在圆弧插补(G02或G03)中,圆弧起始点和圆弧中心之间的距离与圆弧终点和圆弧中心之间的距离之差超出了876号参数设定的值
021 ILLEGAL PLANE AXIS
COMMANDED
在圆弧插补中指定了某个在所选择的平面中不
包括的坐标轴(采用G17、G18、G19)。需对程
序进行修正
025 CANNOT COMMAND F0 IN G02/G03 圆弧插补中指定了F0(快速进给)。需对程序进行修正
027 NO AXES COMMANDED IN G43/G44 在G43 和G44 程序段中没有对刀具长度补偿C 指定坐标轴。补偿未取消,但对另一个坐标轴进行刀具长度补偿C。需对程序进行修正
028 ILLEGAL PLANE SELECT 在平面选择指令中,在同一方向指定了两个或两个以上的坐标轴。需对程序进行修正
029 ILLEGAL OFFSET VALUE 由H代码指定的补偿值太大。需对程序进行修正
030 ILLEGAL OFFSET NUMBER 由D/H 代码指定的用于刀具长度补偿或刀尖半径补偿的补偿号太大。需对程序进行修正
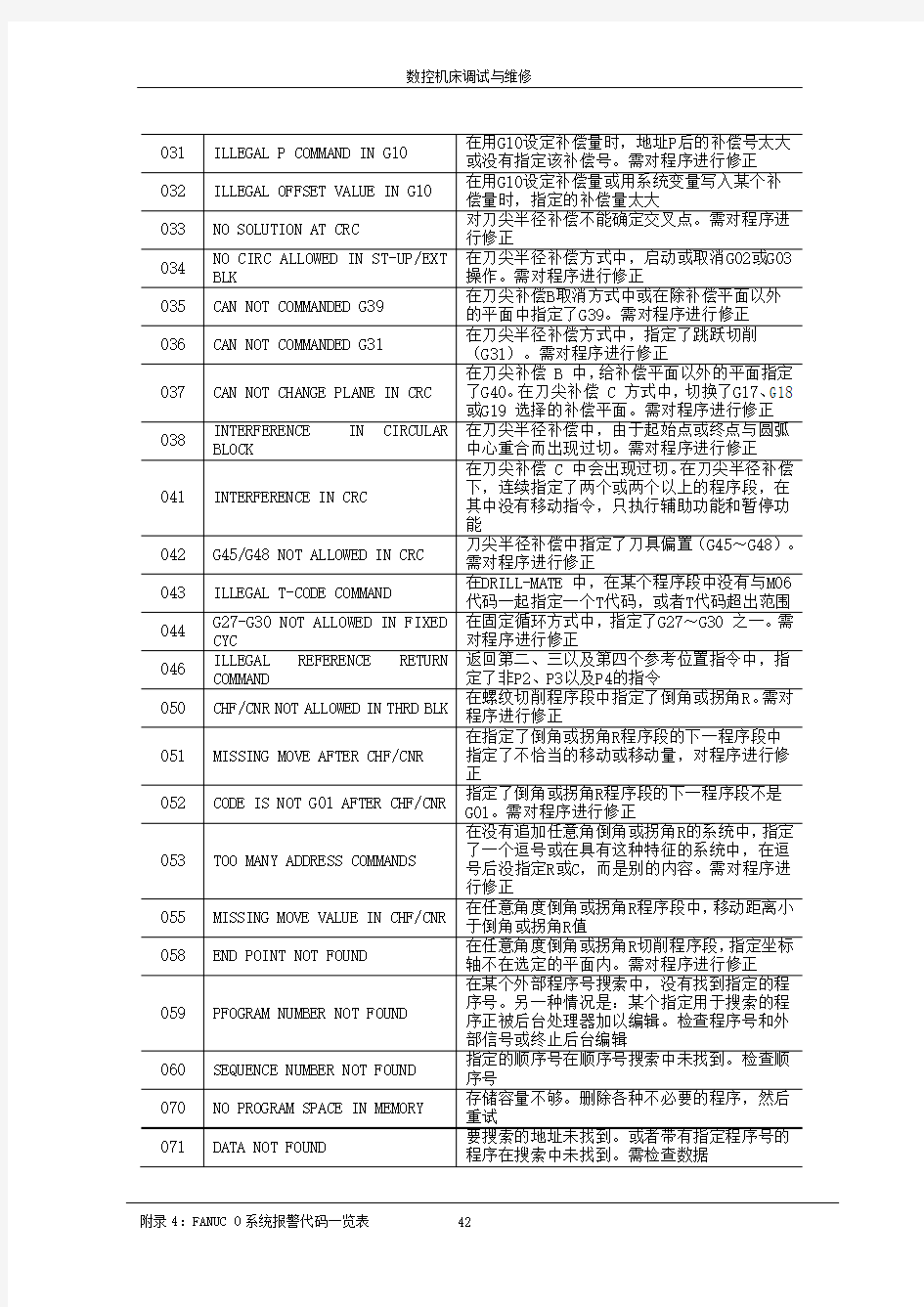
031 ILLEGAL P COMMAND IN G10 在用G10设定补偿量时,地址P后的补偿号太大或没有指定该补偿号。需对程序进行修正
032 ILLEGAL OFFSET VALUE IN G10 在用G10设定补偿量或用系统变量写入某个补偿量时,指定的补偿量太大
033 NO SOLUTION AT CRC 对刀尖半径补偿不能确定交叉点。需对程序进行修正
034 NO CIRC ALLOWED IN ST-UP/EXT
BLK
在刀尖半径补偿方式中,启动或取消G02或G03
操作。需对程序进行修正
035 CAN NOT COMMANDED G39 在刀尖补偿B取消方式中或在除补偿平面以外的平面中指定了G39。需对程序进行修正
036 CAN NOT COMMANDED G31 在刀尖半径补偿方式中,指定了跳跃切削(G31)。需对程序进行修正
037 CAN NOT CHANGE PLANE IN CRC 在刀尖补偿 B 中,给补偿平面以外的平面指定了G40。在刀尖补偿 C 方式中,切换了G17、G18 或G19 选择的补偿平面。需对程序进行修正
038 INTERFERENCE IN CIRCULAR
BLOCK
在刀尖半径补偿中,由于起始点或终点与圆弧
中心重合而出现过切。需对程序进行修正
041 INTERFERENCE IN CRC 在刀尖补偿 C 中会出现过切。在刀尖半径补偿下,连续指定了两个或两个以上的程序段,在其中没有移动指令,只执行辅助功能和暂停功能
042 G45/G48 NOT ALLOWED IN CRC 刀尖半径补偿中指定了刀具偏置(G45~G48)。需对程序进行修正
043 ILLEGAL T-CODE COMMAND 在DRILL-MATE 中,在某个程序段中没有与M06 代码一起指定一个T代码,或者T代码超出范围
044 G27-G30 NOT ALLOWED IN FIXED
CYC
在固定循环方式中,指定了G27~G30 之一。需
对程序进行修正
046 ILLEGAL REFERENCE RETURN
COMMAND
返回第二、三以及第四个参考位置指令中,指
定了非P2、P3以及P4的指令
050 CHF/CNR NOT ALLOWED IN THRD BLK 在螺纹切削程序段中指定了倒角或拐角R。需对程序进行修正
051 MISSING MOVE AFTER CHF/CNR 在指定了倒角或拐角R程序段的下一程序段中指定了不恰当的移动或移动量,对程序进行修正
052 CODE IS NOT G01 AFTER CHF/CNR 指定了倒角或拐角R程序段的下一程序段不是G01。需对程序进行修正
053 TOO MANY ADDRESS COMMANDS 在没有追加任意角倒角或拐角R的系统中,指定了一个逗号或在具有这种特征的系统中,在逗号后没指定R或C,而是别的内容。需对程序进行修正
055 MISSING MOVE VALUE IN CHF/CNR 在任意角度倒角或拐角R程序段中,移动距离小于倒角或拐角R值
058 END POINT NOT FOUND 在任意角度倒角或拐角R切削程序段,指定坐标轴不在选定的平面内。需对程序进行修正
059 PFOGRAM NUMBER NOT FOUND 在某个外部程序号搜索中,没有找到指定的程序号。另一种情况是:某个指定用于搜索的程序正被后台处理器加以编辑。检查程序号和外部信号或终止后台编辑
060 SEQUENCE NUMBER NOT FOUND 指定的顺序号在顺序号搜索中未找到。检查顺序号
070 NO PROGRAM SPACE IN MEMORY 存储容量不够。删除各种不必要的程序,然后重试
071 DATA NOT FOUND 要搜索的地址未找到。或者带有指定程序号的程序在搜索中未找到。需检查数据
072 TOO MANY PROGRAMS 要存储的程序数量超过 63(基本)、125(可选)、200(可选)。删除各种不必要的程序并再执行一次程序登录
073 PROGRAM NUMBER ALREADY IN USE 指定的程序号已经被使用。更改程序号或删除不必要的程序并再执行一次程序登录
074 ILLEGAL PROGRAM NUMBER 程序号为1~9999 以外的数字。需修改程序号
076 ADDRESS P NOT DEFINED 在包括M98、G65 或G66 指令的程序段中,没有指定地址P(程序号)。需对程序进行修正
077 SUB PROGRAM NESTING ERROR 调用的子程序数超出极限值。需对程序进行修正
078 NUMBER NOT FOUND 由包括一个M98、M99、M65 或G66 的程序段中的地址P指定的程序号或顺序号未找到;由一个GO TO语句指定的顺序号未找到。另一种情况是某个调用的程序正被后台处理器进行编辑。需对程序进行修正或终止后台编辑
079 PROGRAM VERIFY ERROR 在存储器与程序校对中,存储器中某个程序与从外部I/O 设备读出的不一致。需检查存储器中的程序以及外部设备中的程序
080 G37 ARRIVAL SIGNAL NOT
ASSERTED
在自动刀具长度测量功能(G37)中,测量位置
达到信号(XAE、 YAE 或ZAE)在参数(数值ε)
指定的某个区域中未接通。这是由于设定或操
作错误引起的
081 OFFSET NUMBER NOT FOUND IN G37 在没有 H 代码的情况下,指定了自动刀具长度测量(G37)。需对程序进行修正
082 T-CODE NOT ALLOWED IN G37 在同一个程序段中指定了 H 代码和自动刀具长度测量(G37)。需对程序进行修正
083 ILLEGAL AXIS COMMAND IN G37 在自动刀具长度测量中,指定了一个非法坐标轴或移动指令是增量指令。需对程序进行修正
085 COMMUNICATION ERROR 在使用阅读机/穿孔机接口往存储器中输入数据时,产生了超程奇偶性或成帧错误。输入数据的位数、波特率的设定或I/O 单元的规格号不正确
086 DR SIGNAL OFF 在使用阅读机/穿孔机接口往存储器中输入数
据时,阅读机/穿孔机的准备信号(DR)被断开。I/O 单元的电源断开、电缆没有连接好或某个印制电路板出故障
087 BUFFER OVERFLOW 在使用阅读机/穿孔机接口往存储器中输入数据时,尽管指定了阅读终止指令,但在阅读了10 个字符后,输入仍未中断。I/O 单元或印制电路板出故障
090 REFERENCE RETURN INCOMPLETE 返回参考位置无法正常执行,因为返回参考位置起始点太靠近参考位置或速度太低。将起始点与参考位置分开足够远的距离,或对返回参考位置指定一个足够快的速度
091 MANUAL RETURN IMPOSSIBLE
DURING PAUSE
手动返回参考位置无法执行,因为系统处于暂
停状态。按RESET (复位)键,手动返回至参
考位置
092 AXES NOT ON THE REFERENCE POINT 由自动返回参考位置(G28)或由G27(返回参考位置检测)指定的坐标轴没有返回至参考位置
094 P TYPE NOT ALLOWED (COORD CHG)在重新启动程序时,无法指定P 类型。(在自动操作被中断后,设定坐标系操作)。按照操作手册执行正确操作
095 P TYPE NOT ALLOWED(EXT OFS CHG)在重新启动程序时,无法指定P类型(在自动操作被中断后,外部工件补偿量被改变)
096 P TYPE NOT ALLOWED(WRK OFS CHG)在重新启动程序时,无法指定P类型(在自动操作被中断后,工件偏移量被改变)
097 P TYPE NOT ALLOWED (AUTO EXEC)在重新启动程序时,无法指定P类型(在电源接通后,在急停或P/S 94~97 复位后,没有执行自动操作)。需执行自动操作
098 G28 FOUND IN SEQUENCE RETURN 在指定某个程序重新启动指令时,在电源接通或急停后,没有返回参考位置,并在搜索过程中找到了G28
099 MDI EXEC NOT ALLOWED AFT.
SEARCH
在程序重新启动中的搜索完成后,用MDI发出了
一个移动指令
100 PARAMETER WRITE ENABLE 在PARAMETER SETTING(参数设置)画面上,PWE (参数允许写入)被设为“1”。将其设为“0”,然后使系统复位
101 PLEASE CLEAR MEMORY 在存储器被程序编辑操作改写时,电源断开。在发出该报警时,通过以下方式可以清除程序:将参数(PWE)设置设为“1”,然后在按住[DELETE]键的同时接通电源。所有的程序将被删除
110 DATA OVERFLOW 固定的小数点显示数据的绝对值超出允许范围。需对程序进行修正
111 CALCULATED DATA OVERFLOW 计算结果无效,并发出111号报警112 DIVIDED BY ZERO 指定了一个0除数(包括正切90度)
113 IMPROPER COMMAND 指定了一个用户宏程序中不能使用的功能。需对程序进行修正
114 FORMAT ERROR IN MACRO 用户宏程序A在某个G65程序段中指定了一个未定义的H代码。用户宏程序B除公式以外的其他格式中存在一个错误。对程序进行修正
115 ILLEGAL VARIABLE NUMBER 在用户宏程序或高速循环加工中指定了一个没有被定义为变量号的数值。标题内容不合适。在下列情况下会发出该报警(高速循环加工)1.对应于被调用的、指定的加工循环号的标题未找到
2.循环连接数值超出允许范围(0~999)3.标题中的数据值超出允许范围(0~32767)4.可执行的数据格式的起始数据变量号超出允许范围(#20000~#85535)
5.可执行的数据格式中最后存储数据的变量号超出允许范围(#85535)
6.可执行的数据格式的保存用起始数据变量号与标题中的变量号重合。需对程序进行修正
116 WRITE PROTECTED VARIABLE 替代语句左侧是一个变量,其替代被禁止。需对程序进行修正
118 PARENTHESIS NESTING ERROR 括号的嵌套超出上限(五重)。需对程序进行修正
119 ILLEGAL ARGUMENT SQRT 自变量为负值或者BCD自变量为负值并且在BIN自变量的每一行中出现0~9以外的其他值对程序进行修正
122 DUPLICATE MACRO MODAL-CALL 宏模态调用被指定了两次。需对程序进行修正
123 CAN NOT USE MACRO COMMAND IN
DNC
在DNC操作过程中采用了宏程序控制指令对程
序进行修正
124 MISSING END STATEMENT DO-END 不对应于1:1。需对程序进行修正
125 FORMAT ERROR IN MACRO 用户宏程序A 指定了 G65 程序段中不能指定的地址。用户宏程序B<公式>格式出错
126 ILLEGAL LOOP NUMBER 在DOn中,未设定1≤n≤3。需对程序进行修正
127 NC MACRO STATEMENT IN SAME
BLOCK
NC指令和用户宏程序指令同时存在。需对程序
进行修正
128 ILLEGAL MACRO SEQUENCE NUMBER 在分支指令中指定的顺序号不是0~9999,或者它无法搜索。需对程序进行修正
129 ILLEGAL ARGUMENT ADDRESS 在<自变量定义>中使用了一个不许使用的地址。需对程序进行修正
130 ILLEGAL AXIS OPERATION PMC向CNC控制的某个轴发出了一个坐标轴控制指令,或者CNC向某个由PMC控制的坐标轴发出了坐标轴控制指令。需对程序进行修正
131 TOO MANY EXTERNAL ALARM
MESSAGES
在外部报警信息中产生五个或五个以上的报
警。参见PMC梯形图,找出其原因
132 ALARM NUMBER NOT FOUND 在外部报警信息全清中不存在相应的报警号。参见PMC梯形图
133 ILLEGAL DATA IN EXT. ALARM MSG 在外部报警信息或外部操作信息中,小部分数据有错误。参见PMC梯形图
135 ILLEGAL ANGEL COMMAND 分度表分度定位角没有以最小角度数值之整数倍数来指定。需对程序进行修正
136 ILLEGAL AXIS COMMAND 在分度台分度中,另一个控制轴与B轴一起被指定。需对程序进行修正
139 CAN NOT CHANGE PMC CONTROL AXIS 在指令中,通过PMC轴控制进行坐标轴选择。需对程序进行修正
141 CAN NOT COMMAND G51 IN CRC 在刀具补偿方式中指定了G51(缩放接通)。需对程序进行修正
142 ILLEGAL SCALE RATE 缩放倍数不是1~999999。修正缩放倍率的设定值
143 SCALED MOTION DATA OVERFLOW 缩放结果、移动距离、坐标值和圆弧半径等超出最大指令值。需对程序进行修正或修正缩放倍率
144 ILLEGAL PLANE SELECTED 坐标旋转平面和弧度或刀尖半径补偿C平面必须相同。需对程序进行修正
148 ILLEGAL SETTING DATA 自动拐角倍率减速比超出可设定的调节角范围。需对参数 PRM#1710~1714 号进行修正
150 ILLEGAL TOOL GROUP NUMBER 刀具寿命管理中的刀具组号超出最大允许值。需对程序进行修正
151 TOOL GROUP NUMBER NOT FOUND 在加工程序中指定的刀具寿命管理的刀具组未设定。需对程序或参数进行修正
152 NO SPACE FOR TOOL ENTRY 刀具寿命管理的一个组中刀具数超出最大可登录数。需修改刀具数
153 T-CODE NOT FOUND 在刀具寿命数据登录中,在应该指定一个T代码的地方却没有指定。需对程序进行修正
154 NOT USING TOOL IN LIFE GROUP 当在刀具寿命管理中没有指定刀具组时,指定了H99或D99。需对程序进行修正
155 ILLEGAL T-CODE IN M06 在加工程序中,在同一个程序段中的M06和T代码与使用中的刀具寿命管理的组号不一致。需对程序进行修正
156 P/L COMMAND NOT FOUND 在设定刀具寿命管理的刀具组的程序标题时,没有指定P和L。需对程序进行修正
157 TOO MANY TOOL GROUPS 要设定的刀具寿命管理的刀具组数量超出最大允许值。需对程序进行修正
158 ILLEGAL TOOL LIFE DATA 要设定的刀具寿命太长。需修正设定值
159 TOOL DATA SETTING INCOMPLETE 在执行设定刀具寿命管理用的程序时,电源被断开。需重新设定
175 ILLEGAL G107 COMMAND 执行圆弧插补启动或取消的条件不对。要将方式改变成圆柱插补方式以“G07.1 旋转轴名称圆柱半径”的格式指定该指令
176 IMPROPER G-CODE IN G107 指定了不能在圆柱插补方式中指定的下列G代码之一:
1)定位用G代码:G28、G73、G74、G76、G81~G89,包括指定快移循环的代码
2)设定坐标系的G代码:G52、G92
3)选择坐标系的G代码:G53、G54~G59
需对程序进行修正
177 CHECK SUM ERROR(G05 MODE)在高速远程缓冲中出现了检验和错误
178 G05 COMMANDED IN G41/G42 MODE 在 G41/G42 方式中指定了G05。需对程序进行修正
179 PARAM. SETTING ERROR 由参数PRM#7510设定的控制坐标轴的数量超出最大数值。需修正参数设定值
180 COMMUNICATION ERROR(REMOTE
BUF)
远程缓冲连接报警。确认电缆号、参数和I/O 设
备
181 FORMAT ERROR IN G81 BLOCK(滚
齿机)
G81程序段格式错误。
1)T齿数没有指定;
2)由T、L、Q 或P指定了超出指令范围的数据。
需对程序进行修正
182 G81 NOT COMMANDED (滚齿机)未指定与G81同步指令G83(C轴伺服滞后量补偿)。需对程序进行修正
183 DUPLICATE G83(COMMANDS)(滚
齿机)
在由G83补偿C轴伺服滞后量以后,在用G82取消
之前又指定了G83
184 ILLEGAL COMMAND IN G81(滚齿
机)
发出了一个不能在G81同步运转中指定的指令。
1)由G00、G27、G28、G29、G30等指定了一个C
轴指令;
2)由G20、G21发出了英制/米制转换指令
185 RETURN TO REFERENCE POINT(滚
齿机)
在电源接通或急停后没有进行一次返回参考位
置就指定了 G81。需执行返回参考位置
186 PARAMETER SETTING ERROR(滚齿
机)
有关G81的参数错误
1)C轴没有设为旋转轴;
2)某个滚齿轴和位置编码器齿轮比设定错误
190 ILLEGAL AXIS SELECT 在恒表面速度控制中,指定坐标轴指令(P)包含一个非法数值。需对程序进行修正
194 SPINDLE COMMAND IN
SYNCHRO-MODE
在串行主轴同步控制方式中,指定了Cs轮廓控
制或刚性攻螺纹。需对程序进行修正
195 SPINDLE CONTROL MODE SWITCH 不能切换串行主轴控制方式。参见PMC梯形图
197 C-AXIS COMMANDED IN SPINDLE
MODE
在当前控制方式不是串行主轴Cs轮廓控制时,
发出了一个用于Cs坐标轴的移动指令。参见PMC
梯形图或加工程序
199 MACRO WORD UNDEFINED 采用了未定义的宏语句。需修正用户宏程序
200 ILLEGAL S CODE COMMAND 在刚性攻螺纹中,S值超出范围或未指定S值。需对程序进行修正
201 FEEDRATE NOT FOUND IN RIGID TAP 在刚性攻螺纹中没有指定F值对程序进行修正202 POSITION LSI OVERFLOW 在刚性攻螺纹中,主轴分配值太大
203 PROGRAM MISS AT RIGID TAPPING 在刚性攻螺纹中,刚性M代码(M29)或S指令的位置不正确。需对程序进行修正
204 ILLEGAL AXIS OPERATION 在刚性攻螺纹中,在刚性M代码(M29)程序段与G84(G74)程序段之间指定了一个坐标轴移动。需对程序进行修正
205 RIGID MODE DI SIGNAL OFF 尽管指定了刚性M代码(M29),但在执行G84(G74)时,刚性方式DI信号却不接通。参见PMC 的梯形图以找出DI信号(DGNG061.1)未接通的原因。需对程序进行修正
210 CAN NOOT COMMAND M198/M199 在预定操作中执行了M198和M199,或M198在DNC 操作中执行
211 CAN NOT COMMAND HIGH-SPEED
SKIP
在每转进给或刚性攻螺纹方式中,指定了高速
跳跃(G31)功能。需对程序进行修正
212 ILLEGAL PLANE SELECT 在包括附加轴的平面中指定任意角度倒角或拐角R。需对程序进行修正
213 ILLEGAL COMMAND IN
SYNCHRO-MODE
在用简单同步化控制的操作中,出现以下任一
种报警:
1)程序给从动轴发布移动指令
2)程序给从动轴发布手动连续进给/手动进给
/增量进给指令
3)在电源接通后没有执行手动返回参考位置,
程序发布自动返回参考位置指令
4)主、从坐标轴之间的位置误差之差超出参数
中设定的数值
214 ILLEGAL COMMAND IN
SYMCHRO-MODE
在同步控制中设定了坐标系或执行了移位型的
刀具补偿。需对程序进行修正
222 DNC OP. NOT ALLOWED IN BG.-EDIT 在后台编辑时进行输入和输出操作。需进行正确操作
224 RETURN TO REFERENCE POINT 在自动操作开始之前没有返回参考位置。需返回参考位置
230 R CODE NOT FOUND 对固定磨削循环的G160程序段,没有指定切入磨削量R或者R指令值为负值。需对程序进行修正
250 SIMULTANEOUS M06 AND Z-AXIS
MOVEMENT NOT ALLOWED
在DRILL MATE中同时指定了换刀(M06)和Z轴
移动。需对程序进行修正
·后台编辑报警
编号含义内容
??? BP/S 报警BP/S报警以与P/S报警(在普通程序编辑中出现)相同编号出现:P/S070、071、072、073、074、085、086、087等
140 BP/S 报警试图在后台选择或删除某个正被前台选择的程序。(注)正确使用后台编辑
注意:采用后台编辑功能时,在MDI操作B中可能显示后台报警。
·绝对脉冲编码器(APC)报警
编号含义内容
3n0 第n轴请求返回原点第n(n=1~8)个坐标轴需要手动返回参考位置
3n1 APC报警:第n轴通讯第n个坐标轴通讯错误。数据传输故障。可能的原因包括APC、电缆或伺服接口模块出故障
3n2 APC报警:第n轴超时第n个坐标轴APC 超时错误。数据传输故障。可能的原因包括APC、电缆或伺服接口模块出故障
3n3 APC 报警:第n轴成帧第n个坐标轴成帧错误。数据传输故障。可能的原因包括APC、电缆或伺服接口模块出故障
3n4 APC 报警:第n轴奇偶性第n个坐标轴奇偶性错误。数据传输故障。可能的原因包括APC、电缆或伺服接口模块出故障
3n5 APC 报警:第n轴脉冲错误第n个坐标轴APC 脉冲错误报警。APC报警。APC 或电缆可能出故障
3n6 APC 报警:第n轴电池电压0 第n个坐标轴APC 电池电压下降至低电平,因此无法保存数据。APC报警。电池或电缆可能出故障
3n7 APC 报警:第n轴电池低1 第n个坐标轴APC电池电压达到一个必须换新电池的电平。APC报警。更换电池
3n8 APC 报警:第n轴电池低2 第n个坐标轴APC电池电压达到一个必须换新电池的电平(包括在电源断开时)。APC报警
·串行脉冲编码器(SPC)报警
在出现下列报警之一时,其可能原因是脉冲编码器或电缆出故障。
编号含义内容
3n9 SPC ALARM:n AXIS PULSE CODER n坐标轴脉冲编码器出故障
注:串行脉冲编码器3n9号报警的详细情况
串行脉冲编码器3n9号报警的详细情况在诊断地址(760~767号,770~777号)中显示:
CSA:串行脉冲编码器出故障。需更换。
BLA:电池电压太低,更换电池。该报警与串行脉冲编码器报警无关。
PHA:串行脉冲编码器或反馈电缆出故障。更换串行脉冲编码器或反馈电缆。
RCA:串行脉冲编码器出故障。需更换。
BZA:串行脉冲编码器首次供电。确保电池电缆连接良好。
将电源断开,再接通执行一次返回参考位置。该报警与串行脉冲编码器报警无关。
CKA:串行脉冲编码器出故障。需更换。
SPH:串行脉冲编码器或反馈电缆出故障。需更换串行脉冲编码器或反馈电缆。
DTE:串行脉冲编码器发生通信错误。脉冲编码器、反馈电缆或反馈接收电路出故障,更换脉冲编码器反馈电缆或NC轴板。
CRC:串行脉冲编码器发生通信错误。脉冲编码器、反馈电缆或反馈接收电路出故障,更换脉冲编码器反馈电缆或NC轴板。
STB :串行脉冲编码器发生通信错误。脉冲编码器、反馈电缆或反馈接收电路出故障。
·伺服报警
编号含义内容
400 SERVO ALARM:1、2TH AXIS
OVERLOAD
1轴、2轴过载信号接通。详情参见720或721号诊断
显示
401 SERVO ALARM:1、2TH AXIS VDRY
OFF
1轴、2轴伺服放大器READY(准备)信号(DRDY)
断开
#7 #6 #5 #4 #3 #2 #1 #0
760至767 CSA BLA PHA RCA BZA CKA SPH
#7 #6 #5 #4 #3 #2 #1 #0 770至777 DTE CRC STB
402 SERVO ALARM:3、4TH AXIS
OVERLOAD
3轴、4轴过载信号接通。详情参见722或723号诊断
显示
403 SERVO ALARM:3、4TH AXIS VDRY
OFF
3轴、4轴伺服放大器READY(准备)信号(DRDY)
断开
404 SERVO ALARM:n-TH AXIS VDRY
ON
尽管第n轴卡(1~8轴)READY(准备)信号(MCON)
断开,但伺服放大器READY(准备)信号DRDY依然
接通,或者当接通电源时,即使MCON断开,DRDY也
接通。查看并确保轴卡和伺服放大器连接完好
405 SERVO ALARM:ZERO POINT
RETURN FAULT
位置控制系统出错。由于返回参考位置中某个NC
或伺服系统出故障,可能使返回参考位置无法正确
执行。再试手动返回参考位置
406 SERVO ALARM:7、8TH ACIS
OVERLOAD
7、8TH AXIS VDRY OFF
7轴、8轴过载信号接通。详情参见726或727号诊断
显示。7轴、8轴伺服放大器READY(准备)信号(DRDY)
断开
4n0 SERVO ALARM:n-TH AXIS
–EXCESS ERROR
当第n轴停止时,位置偏差量大于设定值。(注)
对每个轴的参数,必须设定极限值
4n1 SERVO ALARM:n-TH AXIS –
EXCESS ERROR
当第n轴移动时,位置偏差量大于设定值。(注)
对每个轴的参数,必须设定极限值
4n3 SERVO ALARM:n-TH AXIS-LSI
OVERFLOW
第n轴误差寄存器的内容超出31
2。该误差往往由于
参数设置不当而引起
4n4 SERVO ALARM:n-TH
AXIS-DETECTION RELATED
ERROR
第n轴数字伺服系统出故障。详情参见720至727号
诊断显示
4n5 SERVO ALARM:n-TH
AXIS-EXCESS SHIFT
在第n轴中试图设定一个超出4000000单位/s的速
度。该错误是由于CMR设置不当而引起的
4n6 SERVO ALARM:n-TH
XIS-DISCONECTION
第n轴脉冲编码器中出现位置检测系统故障(断线
报警)
4n7 SERVO ALARM:n-TH
AXIS-PARAMETER INCORRECT
当第n轴处于下列条件之一时,出现该报警。(数
字伺服系统报警)
1)参数号8n20(电动机型号)中设置的值超出指
定范围;
2)在参数号8n22(电动机旋转方向)中没有设置
适当值111或-111;
3)在参数号8n23(电动机每转的速度反馈脉冲数)
中设置了非法数据某个小于0 的数值等;
4)在参数号8n24(电动机每转的位置反馈脉冲数)
中设置了非法数据(某个小于0)的数值等;
5)参数号8n84 和8n85(柔性进给传动比)未设定;
6)某个轴选择参数(从269号至274号)不正确;
7)在参数计算中出现溢出
490 SERVO ALARM :5,6-TH AXIS
OVERLOAD
5轴、6轴过载信号接通。详情参见724或725号诊断
显示
编号含义内容
491 SERVO ALARM:5、6-TH AXIS
VDRY OFF
5轴、6轴伺服放大器READY(准备)信号(DRDY)
断开
494 SERVO ALARM:5、6-TH AXIS
VDRY ON
第5、6轴的轴卡准备信号(MCON)断开,但伺服放
大器READY(准备)信号依然接通。或者,当接通
电源时,即使MCON断开,DRDY也接通。查看并确保
轴卡和伺服放大器连接完好
495 SERVO ALARM:5、6-TH AXIS
ZERO POINT RETURN
这是一个位置控制电路异常。可能是返回参考位置
由于NC 或伺服系统异常而失败。重试返回参考位
置
注意:
如果在刚性攻螺纹中出现主轴误差过大的报警,则会显示攻螺纹进给轴误差过大的报警号。
·4n 4号伺服报警详情:
4n 4号伺服报警的详细说明被显示在轴顺序的720~727号诊断号中 OVL :产生了一个过载报警(该位引起400、402、406/490号伺服报警); LV : 在伺服放大器中产生了低电压报警。检查LED ; OVC :在数字伺服内部产生了一个过电流报警;
HCAL :在伺服放大器内产生了一个异常电流报警。检查LED ; HVAL :在伺服放大器内产生了一个过电压报警。检查LED ; DCAL :在伺服放大器中产生了再生放电电路报警。检查LED ; FBAL :产生了一个断线报警(该位引发4n6 号伺服报警); OFAL :数字伺服内部产生了一个溢出报警。
·主轴报警
编号
含义
内容和相应措施
408
SPINDLE SERIAL LINK START
FAULT
当带串行主轴的系统中的电源接通、而主轴放大器没有准备好不能正确启动时,会产生该报警。 可以考虑以下几种原因:1)光缆连接不合适或者主轴放大器的电源断开;2)当NC 电源在除SU-01 或
AL-24 (显示在主轴放大器的LED 上)以外的其他
报警条件下接通,在这种情况下将主轴放大器电源断开一次然后再进行起动;3)其他原因(硬件配置不恰当)。在系统(含主轴控制单元)被启动后,不会发生该报警
409
SPINDLE ALARM DETECTION
在带有串行主轴的系统中发生了主轴放大器报警。该报警以“AL-XX ”(其中XX 为一个数字)的形式被显示在主轴放大器的显示器上。详情参见交流主
轴(串行接口)(B-65045E )的维修手册。设置0397 号参数的第7位会使主轴放大器报警号出现在画面上
·超程报警
编号 含义
内容和相应措施
5n 0 OVER TRAVEL :+n 超出第n 轴+侧的存储行程检查1、2 5n 1 OVER TRAVEL :-n 超出第n 轴-侧的存储行程检查1、 2 5n 2 OVER TRAVEL :+n 超出第n 轴+侧的存储行程检查 3 5n 3 OVER TRAVEL :-n 超出第n 轴-侧的存储行程检查3
5n 4 OVER TRAVEL :+n 在n 轴上的正向出现硬件超程(M 系列) 5n 5 OVER TRAVEL :-n 在n 轴上的负向出现硬件超程(M 系列) 5n 4 OVER TRAVEL :+n 超出第n 轴+侧的存储行程检查4(T 系列) 5n 5 OVER TRAVEL :-n 超出第n 轴-侧的存储行程检查4(T 系列) 520
OVER TRAVEL :+z
在z 轴上的正向出现硬件超程(T 系列)
#7 #6 #5 #4 #3 #2 #1 #0 720至727
OVL
LV
OVC
HCAL
HVA
DCAL
FBAL
OFAL
590 刀架干涉报警:+X轴在X轴向正向移动中出现刀架干涉报警591 刀架干涉报警:-X轴在X轴向负向移动中出现刀架干涉报警592 刀架干涉报警:+Z轴在Z轴向正向移动中出现刀架干涉报警593 刀架干涉报警:-Z轴在Z轴向负向移动中出现刀架干涉报警·宏程序报警
编号含义内容和相应措施
500
~
590 MACRO ALARM 该报警与用户宏程序、宏程序执行器或定制型宏程序(包括会话式程序输入)有关。详情参见相关手册(宏程序报警号可能与超程报警号相同,但是它们可以被彼此清楚地区分开,因为超程报警号显示报警说明)
·PMC报警
编号含义内容和相应措施
600 PMC ALARM:INVALID
INSTRUCTION
在PMC中出现非法指令中断
601 PMC ALARM:RAM PARITY 出现PMC RAM奇偶性错误
602 PMC ALARM TRANSFER:SERIAL 出现PMC串行传输错误
603 PMC ALARM:WATCHDOG 出现PMC监控定时器报警
604 PMC ALARM:ROM PARITY 出现PMC ROM奇偶性错误
605 PMC ALARM:OVER STEP 超出允许的最大PMC梯形图步数
606 PMC ALARM:I/O MODULE
ASSIGNMENT
I/O模块信号的分配不正确
607 PMC ALARM:I/O LINK 出现I/O链错误。详情如下
编号P M C报警(607号)细节
010 *通信错误SLC主内部寄存器错误
020 *出现一个SLC RAM位错误检验错误
030 *出现一个SLC RAM位错误检验错误
040 没有连接I/O单元
050 连接了32个或更多的I/O单元
060 *数据传输错误从属设备没有响应
070 *通信错误从属设备没有响应
080 *通信错误从属设备没有响应
090 出现一个NMI对于除110~160以外的报警代码的NMI
130 *出现一个SLC主硬件检测到的RAM奇偶性错误
140 *出现一个SLC从硬件检测到的RAM奇偶性错误
160 *SLC(从属设备)通信错误*AL0:监控定时器
接收到DO清零信号*IR1:CRC或成帧错误
监控定时器报警
奇偶性错误
注:显示硬件故障时带有星号(*)
·过热报警
编号含义内容和相应措施
700 OVERHEAT:CONTROL UNIT 控制单元过热;查看风扇电动机是否正常运行,并清理空气过滤器
704 OVERHEAT:SPINDLE 在主轴波动检测过程中,主轴过热。检查切削条件(T系列)
·M-NET报警
编号含义内容和相应措施
899 M-NET INTERFACE ALARM 该报警与外部PLC的串行接口有关。详情如下:编号M-NET报警(899号)的详细情况
0001 接收到异常字符(传输代码以外的字符)
0002 “EXT”代码错误
0003 时间监控器连接错误(参数号0464)
0004 查询时间监控器错误(参数号0465)
0005 检测到垂直奇偶性或成帧错误
0257 传输超时错误(参数号0466 )
0258 ROM奇偶性错误
0259 检测到超程错误
其他检测到CPU中断
·系统报警(这些报警不能用复位键进行复位)
编号含义内容和相应措施
910 MAIN RAM PARITY 主RAM奇偶性错误(低位字节)。更换存储器PC 板
911 MAIN RAM PARITY 主RAM奇偶性错误(高位字节)。更换存储器PC 板
912 SHARED RAM PARITY 该奇偶性错误与数字伺服电路共享的RAM的低位字节有关,更换轴控制PC板
913 SHARED RAM PARITY 该奇偶性错误与数字伺服电路共享的RAM的高位字节有关。更换轴控制PC板
914 SERVO RAM PARITY 这是一个数字伺服电路中的局部RAM奇偶性错误。更换轴控制PC板
915 LADDER EDITING CASSETTE RAM
PARITY
该RAM奇偶性错误与梯形图编辑卡的低位字节有
关。更换梯形图编辑卡
916 LADDER EDITING CASSETTE RAM
PARITY
该RAM奇偶性错误与梯形图编辑卡的高位字节有
关,更换梯形图编辑卡。
920 WATCHDOG ALARM 这是1~4轴的监控定时器报警或伺服系统报警。更换主PC板或轴控制PC板
921 SUB CPU WATCHDOG ALARM 这是与子CPU板相关的监控定时器报警或第5、6轴的伺服系统报警。更换子CPU板或5/6轴控制PC 板
922 7/8 AXIS SERVO SYSTEM ALARM 这是第7或8轴的伺服系统报警。更换7/8轴控制PC板
930 CPU ERROR 这是一个CPU错误。更换主CPU板940 PC BOARD INSTALLATION ERROR PC板安装不正确。检查PC板的规格
941 MEMORY PC BOARD CONNECTION
ERROR
存储PC板连接不良。确保PC板连接牢固
945 SERIAL SPINDLE COMMUNICATION
ERROR
串行主轴的硬件配置不正确或发生了一次通信
报警,检查主轴的硬件配置。另外还要确保串行
主轴的硬件被牢固连接好
946 SECOND SERIAL SPINDLE
COMMUNICATION ERROR
无法与第二个串行主轴进行通信。确保第二个串
行主轴被牢固连接好
950 FUSE BLOWN ALARM 熔丝被熔断。更换熔丝(+24E:F14)
960 SUB CPU ERROR 这是一个子CPU错误。更换子CPU板
998 ROM PARITY 这是一个ROM奇偶性错误。更换发生错误的ROM
·外部报警
编号含义内容和相应措施
1000 EXTERNAL ALARM 该报警是由PMC梯形图检测到的,详细情况参见机床制造厂家提供的有关手册
消防电气 JB-3028飞繁系列火灾报警 系统简介: JB-3208型火灾报警控制系统是上海松江飞繁电子有限公司于2009年最新推出的新一代火灾报警控制系统,该系统除继承了原有的全总线制联动型、智能型、局域网功能等以外,在设计理念上又有了新的提升:1)32位ARM7嵌入式系统作为核心处理器,配以实时多任务操作系统软件,使整个系统处理数据速度快,运算效率高;2)各个功能部件模块化设计,使系统配置容量伸缩自如;3)富有特色的联动操作键盘不再与地址容量相关,而是按联动设备名称或所在分区,设置地址进行操作,更灵活方便。 该系统主要技术指标如下: ●控制器输入总线≤72回路,总线长度≤1500m,回路上可带探测器、中 继模块、输入输出模块、按钮、火灾显示盘等,每回路总数不超过252 点,最大容量18000点; ●多线控制标准配置为1组8点,最大容量为20组160点; ●可带ZY-4B气体灭火单元8套共32个灭火分区; ●可带消防控制是图形显示装置≤2台; ●可组成最多为30台的火灾报警控制系统局域网; ●消防电话总机可带总线电话分机≤99只; ●消防广播主机功率有120W、250W、500W、三种。 声光报警器: ●工作电压:DC24V ●工作电流:≦60mA ●报警声压级:≧88dB(正前方3米处) ●闪光指标:频率≧30~45次/分;强度≧30cd ●外形尺寸及颜色:126*126*45;红色 ●使用说明:二总线制,二进制地址编码;接线要求:BV线≧1.0mm2
手动报警按钮(带插孔型及不带插孔型)/消火栓按钮: ●操作方式:人工手动压下玻璃报警操作方式(可恢复) ●监控电流:<350μA ●报警电流:2mA ●接线要求:BV线≧1.0mm 2 ●使用环境:温度-10℃~50℃;相对湿度≦95%(40℃±2℃) ●外形尺寸及颜色:96*96*35.5;红色 ●特点: 手动报警按钮: 二总线制,无极性; 软件地址编码 有带电话插孔和不带电话插孔二类 消火栓按钮: 二总线制,无极性; 软件地址编码 报警功能:报警输入总线 启泵功能:启泵信号线和启泵指示反馈线各二根 消防电话: ●工作电压:DC24V±10% ●工作频率:300~3400HZ话音传输损耗<5Db ●功耗:总机:(DC24V)≦0.5A;分机:(DC24V)≦20mA ●通讯距离:≦1500m ●接线要求:RVS线≧1.5mm2(单独穿管) ●使用环境: 温度:-10℃~50℃相对湿度≦95%(40℃±2℃) 环境噪声≦60dB ●使用方式: HJ-1765Z二总线制,分正负极性,最大容量为99个编码地址,可配接HY5716B总线电话分机
FANUC伺服系统维修技术经验总结及FANUC伺服电机维修方法2 2.数字式交流伺服驱动单元的故障检测与维修 (1)驱动器上的状态指示灯报警 FANUC S系列数字式交流伺服驱动器,设有11个状态及报警指示灯,指示灯的状态以及含义见表5-8。 以上状态指示灯中,HC、HV、OVC、TG、DC、LV的含义与模拟式交流速度控制单元相同,主回路结构与原理亦与模拟式速度控制单元相同,不再赘述。表5-8中,OH、OFAL、FBL 为S系列伺服增添的报警指示灯,其含义如下。 1)OH报警。OH为速度控制单元过热报警,发生这个报警的可能原因有: ①印制电路板上S1设定不正确。 ②伺服单元过热。散热片上热动开关动作,在驱动器无硬件损坏或不良时,可通过改变切
削条件或负载,排除报警。 ③再生放电单元过热。可能是Q1不良,当驱动器无硬件不良时,可通过改变加减速频率,减轻负荷,排除报警。 ④电源变压器过热。当变压器及温度检测开关正常时,可通过改变切削条件,减轻负荷,排除报警,或更换变压器。 ⑤电柜散热器的过热开关动作,原因是电柜过热。若在室温下开关仍动作,则需要更换温度检测开关。 2)OFAL报警。数字伺服参数设定错误,这时需改变数字伺服的有关参数的设定。对于FANUC 0系统,相关参数是8100,8101,8121,8122,8123以及8153~8157等;对于10/11/12/15系统,相关参数为1804,1806,1875,1876,1879,1891以及1865~1869等。 3)FBAL报警。FBAL是脉冲编码器连接出错报警,出现报警的原因通常有以下几种: ①编码器电缆连接不良或脉冲编码器本身不良。 ②外部位置检测器信号出错。 ③速度控制单元的检测回路不良。 ④电动机与机械间的间隙太大。 (2)伺服驱动器上的7段数码管报警 FANUC C系列、α/αi系列数字式交流伺服驱动器通常无状态指示灯显示,驱动器的报警是通过驱动器上的7段数码管进行显示的。根据7段数码管的不同状态显示,可以指示驱动器报警的原因。 FANUC C系列、电源与驱动器一体化结构型式(SVU型)的α/αi系列交流伺服驱动器的数
内容:在正面门打开的情况下,按了循环启动键。 处理:请把正面门关上再按循环启动按钮 PS:或者K参数K4.6 0改1 开着门也可以按启动按钮 内容:在左侧门打开的情况下,按了循环启动键。 处理:请把左侧门关上再按循环启动按钮 PS:或者K参数K4.7 0改1 开着门也可以按启动按钮 内容:气压不足,空压低下 处理 : 调节气压阀,增加气泵 PS:维修时,K参数K4.4 0改1 可屏蔽此报警,但不能执行换刀指令内容:水箱切削液液位过低 处理 : 1. 添加切削液,加到水箱水位2/3以上 2. 如果还是报警,请调节水箱上面的液位感应灯 3. K参数 K 4.5 0改1 可屏蔽此报警 内容:油路压力不足 处理 : 1. 检查用油是否太快,油管接头是否漏油 检查导轨油加油时间的频率是是否正常
(比如:一周添加一次) 2. 在没有漏油,加油频率正常的情况下 K参数 K13.2 0改1 可屏蔽此报警 内容:导轨油油箱液位不足 处理 : 请添加导轨油 PS:机床维修时 K参数K4.3 0改1 可屏蔽此报警 注意:正常加工时严禁屏蔽此参数,长时间屏蔽后会造成丝杆,轴承,线轨磨损加快很多。 PS:一般不会出现这个报警。 PS:出现这个报警,一般是水泵的热敏开关损坏,可对调开关做测试 PS:机床电柜右下角有两个电池盒,一个是脉冲编码器电池,一个是NC装置电池更换电池请把机床各轴回原点后再进行更换,防止机械原点丢失。 PS:出现M编码循环超时报警,它的意思是执行了这个指令,机床没有动作 1.G01 倍率开关在0的位置的时候,有些时候会出现这个报警。 2.一个程序段不能出现3个以上的M指令 内容:刀库位置异常 W轴机械坐标位置不对
C.警告代码 手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。 j 附录目录 C.1 警告代码表的具体描述 C.2 警告代码 C.1 警告代码表的具体描述 其中:Alarm code表示警告代码;Message表示信息;Alarm severity 表示警告强度。 警告 在程序被校正或返回执行或当从外围单元输入一个紧急制动信号或是其他警告信号时失败则会引发警告。警告是用来提示操作员发生故障,使其为安全起见能中断处理。 提示:如果出现的警告编号不在这里给出代码内,请和FANUC机器人专家联系。 警告代码显示或指示 当引发了一个警告,在教导盒上的警告LED发光二极管会亮起,首先会在出现警告信息,然后会出现界面命令行。操作员可以通过查看LED和信息得知引发了哪个警告。 图C-1 警告显示
警告强度 如何操作程序或机器人直到程序或机器人停止取决于引发警告的原因的严重性。这个“严重性”被成为强度。警告强度级别如下所示: 表C-1 警告强度 活动警告界面只显示活动的警告。一旦该警告被警告清除信号输入清除,活动警告界面显示:“没有活动的警告”。 在上一条警告清除信号输入后,界面显示警告输出。当在警告历史纪录界面按下删除键(+shift),相应的警告会从活动警告界面里清除。 该界面显示警告的严重等级为PAUSE或更高。不会显示W ARN警告,NONE警告或重置。如果系统变量诸如$ER_NOHIS设置正确的话,一些PAUSE警告或是更严重的警告也可能不会被显示。 如果检测到了多个警告,该界面按检测到的顺序反向显示。
最大可以显示100行。 如果警告有错误发生代码,该代码会在警告显示行下显示出来。 图C-2显示活动警告界面和警告历史记录界面的操作流程。 其中:MENU key pressed, then 4ALARM selected表示:按下MENU(菜单)键,然后选择 4ALARM;Alarm key pressed表示:按下警告键;Automatically displayed when an alarm is output表示:当警告被输出会自动被显示;Active alarm screen displayed表示:显示活动警告界面;Alarm history screen displayed表示:显示警告历史记录界面。 自动警告显示函数 当检测到一个会导致系统停止(PAUSE或更严重的警告)的警告,自动警告界面显示函数会自动显示警告界面。这个函数可以使得操作员不用手动显示警告界面,也可以使得导致系统故障的原因被快速发现。 提示:显示要求被满足,即使在开始时检测到一个警告也会自动显示警告界面。自动警告显示被执行,不考虑启动的模式。 提示:当连接了CRT,检测到了一个警告,警告界面会在教导盒和CRT上同时出现。 自动警告界面显示所需条件如下所述: F 当自动警告界面显示函数的标记被设定了。 在系统设定界面,选择AUTO.DISPLAYOFALARMMENU以开启或关闭自动显示函数。该函数默认为关闭。为了使此改变生效,电源必须关闭,再重启。->参见章节3.18。 F 当为警告强度等级设定的警告菜单标记的Auto.display被设定了。 $ER_SEV_NOAUTO[]设置是否为每个警告强度等级开启或关闭自动警告界面显示。有几种警告强度等级。NONE和W ARN警告不会影响出现执行和机器人的操作,也不会触发自动警告显示。默认设置为,自动警告显示对PAUSE和更严重的警告有效。在 FALSE:自动警告界面显示被关闭。
常用故障代码和故障排除方法 伺服 - 001操作面板紧急停止 SRVO- 001 Operator panel E-stop [现象]按下了操作箱/操作面板的紧急停止按扭。 SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。(注释) [对策1]解除操作箱/操作面板的紧急停止按扭。 [对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。 [对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。逐一更换开关单元或操作面板。 [对策4]更换配电盘。 [对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。 在采取对策6之前,完成控制单元的所有程序和设定内容的备份。 [对策6]更换配电盘。 (注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。(参阅示教操作盘的报警历史画面) 伺服-001操作面板紧急停止 伺服-004栅栏打开 サーボ-007外部紧急停止 伺服-204外部(SVEMG异常)紧急停止 伺服-213保险丝熔断(面板PCB) 伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止 SRVO- 002 Teach pendant E-stop [现象]按下了示教操作盘的紧急停止按扭。 [对策1]解除示教操作盘的紧急停止按扭。 [对策2]更换示教操作盘。 伺服 - 003紧急时自动停机开关 SRVO- 003 Deadman switch released [现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 [对策1]按下紧急时自动停机开关并使机器人操作。 [对策2]更换示教操作盘。 伺服 - 021SRDY断开(组:i轴:j) SRVO- 021 SRDY off (Group:i Axis:j) [现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。(所谓HRDY,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服相对于主机发出伺服放大器是否已经停止的信号。
FANUC系统常见报警中文对照及解决方法 1005 X AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 X轴闭锁.禁止移动(没在交换台过程中,没在修调方式,台板1或2在伸出位 X轴锁住,不能移动 设D493=1进入修调方式.检查继电器,电磁阀,开关及线路 1006 Y AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 机械手臂在主轴側 Y轴锁住,不能移动. 设D499=1进入修调方式.检查继电器,电磁阀,开关及线路 1007 Z AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 机械手臂在主轴側 ZY轴锁住,不能移动. 设D499=1进入修调方式.检查继电器,电磁阀,开关及线路
1010 SPINDLE TOOL NOT CLAMP 产生状态及原因 主轴刀具未夹紧。 主轴不能旋转。 检查主轴刀具夹紧开关,确认动作正常后, 同时按下键和键,清除报警。 1011 SPINDLE TOOL NOT UNCLAMP 产生状态及原因 主轴刀具未松开。 主轴不能旋转。 检查主轴刀具松开开关,确认动作正常后, 同时按下键和键,清除报警。 1012 SPINDLE ORIENTAL NOT COMPLETE 产生状态及原因 主轴定向未完成(F45.7没输出)。 不能进行刀具交换。 检查主轴定向开关是否工作正常。 1013 M FUNCTION DID NOT COMPLETE 产生状态及原因 在执行M功能时,可能是某个M代码未执行完.程序加工不能正常进行. 检查是哪一个M功能未执行。
FANUC伺服报警与故障处理 2008年12月05日 14:02 伺服报警与故障处理 2-1伺服的基本连接和电压规格 对于 PSM 模块或 PSM-HV模块 电源模块测量点 CIR/CIS 为电流反馈测量点,通过测量出电压,根据不同型号的模块查对下表,
型号PSM11的电源模块,从 IR/IS 端子测出电压为2V,则实际负载电流是37.5 X 2 = 75(安) 2-2报警显示(CRT/LCD报警容)
FANUC伺服报警与故障处理(二) 2008年12月05日 14:03
表中 PSM ——电源模块 SPM ——主轴模块 SVM ——伺服模块 表中“逆变器”是指驱动模块的电源模块——PSM FANUC数字伺服参数的初始化设置 2008年12月05日 14:05 数字伺服参数的初始化设置 由于数字伺服控制是通过软件方式进行运算控制的,而控制软件是存储在伺服ROM中。通电时数控系统根据所设定的电机规格号和其它适配参数——如齿轮传动比、检测倍乘比、电机方向等,加载所需的伺服数据到工作存储区(伺服ROM 中写有各种规格的伺服控制数据),而初始化设定正是进行电机规格号和其它适配参数的设定。 设定方法如下: 1. 在紧急停止状态,接通电源。 2. 确认显示伺服设定调整画面的参数 SVS (#0)=1 (显示伺服画面) * 按照下面顺序,显示伺服参数的设定画面 按 [SYSTEM] 健,再按翻页(扩展)键,找到软件键 [SV-PRM] * 使用光标、翻页键,输入初始设定必要的参数 (1)初始设定位 #3(PRMCAL)1:进行参数初始设定时,自动变成1。根据脉冲编码器的脉冲数自动计算下列值。 PRM 2043(PK1V),PRM 2044(PK2V),PRM 2047(POA1), PRM 2053(PPMAX),PRM 2054(PDDP), PRM 2056(EMFCMP), PRM 2057(PVPA),PRM 2059(EMFBAS), PRM 2074(AALPH),PRM 2076(WKAC) #1(DGPRM)0:进行数字伺服参数的初始化设定。 1:不进行数字伺服参数的初始化设定。 #0(PLC01) 0:使用PRM 2023,2024的值。 1:在部把PRM 2023,2024的值乘10倍。 (2)电机ID号 选择所使用的电机ID号,按照电机型号和规格号(中间4位:A06B-XXXX-BXXX)列于下面的表格中。对于本手册中没叙述到的电机型号,请参照α系列伺服放大器说明书。 例:
FANUC交流速度控制单元有多种规格,早期的交流伺服为模拟式,目前一般都使用数字式伺服,在数控机床中,常用的规格型号有以下几种: 1)与FANUC交流伺服电动机AC0、5、10、20M、20、30、30R等配套的模拟式交流速度控制单元。它是FANUC最早的AC伺服产品,速度控制单元采用正弦波PWM控制,大功率晶体管驱动。在结构形式上,可以分单轴独立型、双轴一体型、三轴一体型三种基本结构。单轴独立型速度控制单元,常用的型号有 A06B-6050-H102/H103/H104/H113等;双轴一体型速度控制单元,常用的型号有A06B-6050-H201/H202/H203等;三轴一体型速度控制单元,常用的型号有A06B-6050-H401/H402/H403/H404等,多与FANUC 11、0A、0B等系统配套使用。 2)与FANUC交流S (L、T)系列伺服电动机配套的S (L、C)系列数字式交流伺服驱动器,它是FANUC中期的AC伺服产品,驱动器采用全数字正弦波PWM控制,IGBT驱动。其中,S系列用量最广,规格最全;L 系列只有单轴型结构,常用的型号有A06B-6058-H001-H007/H102/H103等;C系列有单轴型、双轴型两种结构,常用的单轴型有A06B-6066-H002-H006等规格,常用的双轴型有A06B-6066-H222~H224/H233、H234、H244等规格。 作为常用规格,S系列有单轴型、双轴型、三轴型三种结构,常用的单轴型有 A06B-6058-H001~H007/H023/H025等;常用的双轴型有A06B-6058-H221~H231/H251-H253等规格;常用的三轴型有A06B-6058-H331-H334等规格;多与FANUC 0C、11、15系统配套使用。 3)与FANUC α/αC/αM/αL系列伺服电动机配套的FANUC α系列数字式交流伺服驱动器,它是FANUC 当前常用的AC伺服产品,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。FANUC α系列数字式交流速度控制单元有如下两种基本结构形式: ①各驱动公用电源模块(PSM)、伺服驱动单元(SVM)为模块化安装的结构形式,驱动器可以是单轴型、双轴型与三轴型三种结构。常用的单轴型有A06B-6079-H101~H106等,常用的双轴型有 A06B-6079-H201~H208等规格,常用的三轴型有A06B-6079/6080-H301~H307等规格,多与FANUC 0C、15A/B、16A/B、18A、20、21系统配套使用。 ②电源与驱动器一体化(SVU型)的结构形式,各驱动器单元可以独立安装,有单轴型、双轴型两种结构,常用的单轴型有A06B-6089-H10l~H106等规格,常用的双轴型有A06B-6089-H201~H210等规格,多与FANUC 0C、0D、15A/B、16A/B、18A、20、21系统配套使用。 4)与FANUC β系列伺服电动机配套的FANUC β系列数字式交流伺服驱动器,它亦是FANUC当前常用的AC伺服产品,采用电源与驱动器一体化(SVU型)的结构,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。可以使用PWM接口、I/OLink接口,亦可以采用光缆接口。型号为 A06B-6093-H101~H104/H151~H154//H111-H114,多与FANUC 0TD、PM01等经济型数控系统配套使用。 5)与FANUC αi系列伺服电动机配套的FANUCα i系列伺服驱动器是FANUC公司的最新产品,它在FANUC α系列的基础上作了性能改进。产品通过特殊的磁路设计与精密的电流控制以及精密的编码器速度反馈,使转矩波动极小,加速性能优异,可靠性极高。电动机内装有脉冲/转极高精度的编码器,作为速度、位置检测器件,使系统的速度、位置控制达到了极高的精度。 α i系列驱动器由电源模块(PSM)、伺服驱动器(SVM)、主轴驱动器(SPM)等组成,伺服驱动与主轴驱动共用电源模块,组成伺服/主轴一体化的结构。伺服驱动模块有单轴型、双轴型、三轴型三种基本规格。标准型(FANUC αi系列)为200VAC输入,常用的单轴型有A06B-6114-H103~H109等,双轴型有 A06B-6114-H201-H211等,三轴型有A06B-6114-H301~H304等。高电压输入型(FANUC α i(HV)系列)为400VAC 输入,常用的单轴型有A06B--6124-H102~H109等,双轴型有A06B-6124-H201-H211等,目前尚无三轴型结构。FANUC αi系列交流数字伺服配套的数控系统主要有FANUC 0i、FANUC 15i/150i、 FANUC16i/18i/l60i/180i/20i/21i等。
FANUC报警列表(2) 三、编码器报警 1.3n0号报警 报警信息: “nth-axis origin reurn”,第n轴原点返回。 报警说明:第n轴机械参考点无效,应重新人工设定该轴的参考点。 2.3n1号报警 报警信息: “APC alarm:nth-axis communction”,APC(绝对脉冲编码器)报警:第n轴通讯错误。 报警说明:第n轴绝对编码器数据通信出错,数据传送失败。 3.3n2号报警 报警信息: “APC alarm:nth-axis over time”,APC(绝对脉冲编码器)报警: 第n轴超时。 报警说明: 绝对编码器数据传送超时。 4.3n3号报警 报警信息: “APC alarm:nth-axis framing”,APC(绝对脉冲编码器)报警:第n轴格式错。 报警说明:绝对编码器数据格式出错,数据传送失败。 5.3n4号报警 报警信息: “APC alarm:nth-axis parity”,APC(绝对脉冲编码器)报警:第n轴奇偶错误。 报警说明:绝对编码器数据奇偶性出错,数据传送失败。 6.3n5号报警 报警信息: “APC alarm:nth-axis:nth-axis pulse error”,APC(绝对脉冲编码器)报警:第n轴脉冲错误。 报警说明:绝对编码器脉冲数据丢失,绝对编码器(APC)故障。 7.3n6号报警 报警信息: “APC alarm:nth-axis battery voltage 0”,APC(绝对脉冲编码器)报警: 第n轴电池电压为0。 报警说明:绝对编码器无电池,数据不能保持。 8.3n7号报警 报警信息: “APC alarm:nth-axis battery low 1”,APC(绝对脉冲编码器)报警:第n轴(编码器)电池电压降低到级别1。 报警说明:绝对编码器电池电压下降,必须更换电池。 9.3n8号报警 报警信息: “APC alarm:nth-axis battery low2”,APC(绝对脉冲编码器)报警:第n轴(编码器) 电池电压降低到级别2。 报警说明:绝对编码器电池电压下降,必须更换电池(包括电源关闭)。 10.3n9号报警 报警信息: “SPC alarm:nth axis pulse coder”,SPC (串行脉冲编码器)报警:第n轴脉冲编码器故障。 报警说明:轴脉冲编码器错误。 四、伺服系统报警 1.400号报警 报警信息: “SERVO ALARM:1,2th axis overload”,伺服报警:第1、第2轴过载。 报警说明:伺服电机或伺服放大器过热。 2.401号报警 报警信息: “SERVO ALARM:1,2th axis VRDY off”,伺服报警:第1、第2轴VRDY 信号关断。 报警说明:伺服放大器模块准备好信号(VRDY)断开(伺服放大器故障)。 3.402号报警 报警信息: “SERVO ALARM:3,4th axis overload”,伺服报警:第3、第4轴过载。
目录 一、用户需求分析 (2) 二、系统方案设计 (2) 1.1布防与撤防 (3) 1.2布防后的延时 (3) 1.3防破坏 (4) 1.4微机联网功能 (4) 1.5探测器的布置 (4) 1.6探测器的选型 (4) 1.6.1被动红外/微波探测器 (5) 1.6.2双束光电探测器 (7) 1.6.3报警控制通讯主机 (8) 1.6.路继电器输出板 (14)
报警系统 一、用户需求分析 报警子系统主要由双鉴探测器、玻璃破碎探测器、报警控制主机、控制键盘、防区(地址)编码器、警号、报警电子地图管理软件、电脑组成。各报警点可以任意分区,控制其集体或单独布撤防,在电脑上对各报警进行实时监控,该子系统采用先进、成熟的传感技术和信号分析技术,对企图实施各种犯罪行为的罪犯实施打击控制,以确保酒店内工作人员的安全。 在建筑物的周界外墙,采用红外对射式探测器结合室外球型摄像机及保安照明的防范措施,当入侵者越过周界时产生报警信号。 二、系统方案设计 整个系统在布防状态下,一旦有人非法闯入,系统立即报警。在报警的同时,管理中心会显示报警区域、时间、报警类型等信息,提示管理人员进行处理,并将报警信息储存和打印。 本系统具有二级联网功能,所谓二级联网系统是指在区域发生报警后,或者发生其它紧急状况时,安保中心人员手动报警向区域报警控制中心再报警的模式。(根据项目实际情况增加的功能,建议较大型的酒店、建筑群增加该功能)系统具有防破坏功能。整个系统在短路或断路时,系统会发出相应的报警信息。系统具有备电功能,在外供电源停电时,系统能使用备电继续工作。 系统报警响应时间≤3秒,报警持续时间>30秒(及二级联网报警时间≤30秒)。
FANUC常见伺服报警及解决方法 SV0301:APC报警:通信错误 1、检查反馈线,是否存在接触不良情况。更换反馈线; 2、检查伺服驱动器控制侧板,更换控制侧板; 3、更换脉冲编码器。 SV0306:APC报警:溢出报警 1、确认参数No.2084、No.2085是否正常; 2、更换脉冲编码器。 SV0307:APC报警:轴移动超差报警 1、检查反馈线是否正常; 2、更换反馈线。 SV0360:脉冲编码器代码检查和错误(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 SV0364:软相位报警(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 3、检查是否有干扰,确认反馈线屏蔽是否良好 。 SV0366:脉冲丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 2、更换脉冲编码器。 SV0367:计数丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 3、更换脉冲编码器。 SV0368:串行数据错误(内装)报警 1、检查反馈线屏蔽是否良好; 2、更换反馈线; 3、更换脉冲编码器。 SV0369:串行数据传送错误(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰源; 2、更换反馈线; 3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警 1、检查分离型接口单元SDU是否正常上电; 2、更换分离型接口单元SDU。 SV0385:串行数据错误(外置)报警 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0386:数据传送错误(外置) 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0401:伺服准备就绪信号断开 1、查看诊断No.358,根据No.358的内容转换成二进制数值,进一步确认401报警的故障点。 2、检查MCC回路; 3、检查EMG急停回路; 4、检查驱动器之间的信号电缆接插是否正常; 5、更电源单元。 同步控制中SV0407:误差过大报警 1、检查同步控制位置偏差值; 2、检查同步控制是否正常。 移动轴时SV0409报警 1、检查移动时该轴的负载情况; 2、确认机械是否卡死; 3、确认伺服参数设定是否正常; 4、更换伺服电机; 5、更换伺服驱动器。 SV0410:停止时误差过大报警 1、检查机械是否卡死; 2、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 3、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,更换电机或伺服驱动器。 SV0411:移动时误差过大报警 1、查看负载情况,若负载过大。 2、检查机械是否卡死; 3、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 4、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,伺服驱动器。
入侵报警系统设计方案 设 计 技 术 方 案
一、入侵报警系统概述 系统采用总线制结构,每一个现场报警设备均有各自独立的地址,当发生非正常事件报警时,系统能够自动识别报警来源,并在电子地图上显示出报警区域位置,同时声光报警器发出报警声光提醒保卫人员及时处理警情; 保卫人员可以在报警主机根据不同时段需要进行布防、撤防等操作,可以在电子地图进行相应的操作。报警管理软件具有报警信息的记录、统计、打印报表等相应功能。 二、设计依据 《智能建筑设计标准》 GB/50314-2015 《智能建筑工程验收规范》 GB 50339—2003 《建筑设计防火规范》 GB50016-2006 《厅堂扩声系统设计规范》 GB50371-2006 《建筑及建筑群综合布线系统工程设计规范》 GB/T50311-2007 《建筑及建筑群综合布线系统工程验收规范》 GB/T50312-2007 《剧场、电影院和多用途厅堂建筑声学设计规范》 GB/T 50356-2005 《高清晰度电视节目制作及交换用视频参数值》 GY/T155-2000 《演播室高清晰度电视数字视频信号接口》 GY/T157-2000 《演出场所扩声系统的声学特性指标》 WH/T 18-2003 《多通路音频数字串行接口》 GY/T187-2002 《剧场建筑设计规范》 JGJ57-2000/J67-2001 《音频、视频及类似电子设备安全要求》 GB/T8898-2001 三、系统功能设计 在办公楼、培训信息楼设置报警系统,主控制设备设置在办公楼一层消防控制中心。 报警系统采用RS485总线方式传输,中心控制室设置报警主机,并通过电脑对报警主机进行管理以及电子地图直观的界面操作。可根据探测器布设区域的性质采取分区式布防,紧急按钮实时处于布防状态。
第一章常见报警的解释 1.1 368报警(串行数据错误) 上图中368报警以及相关编码器报警的原因有: (1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。 (2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导 致系统报警。尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。(3)伺服放大器的控制侧电路板损坏。 解决方案: (1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。 (2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆是否正常。 1.2 电源模块PSM控制板内风扇故障443,610
上图报警是电源模块控制板内风扇损坏导致的报警(使用αi电源模块时),报警时电源模块PSM的LED显示“2”,主轴放大器SPM的LED显示“59”。 拆下电源模块控制板后,风扇位置如下图所示: 1.3 主轴放大器SPM内冷风扇故障 此故障没有画面报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。 1.4 伺服放大器SVM内冷风扇报警608,444
上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。上图中的报警出现时对应的伺服放大器上的LED 显示“1”。 1.5 主轴放大器和伺服放大器的内冷风扇位置 上图中: (1)主轴放大器内冷风扇的安装位置 (2)伺服放大器内冷风扇的安装位置 (3)主轴放大器的型号A06B-6111-H XXX#H550(后面带#H***的都是主轴放大器)(4)伺服放大器的型号A06-6114-HXXX 注: (1)不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。(2)导致放大器侧风扇故障的原因主要是因为客户现场工作环境较差,致使风扇上粘有油污,使风扇转动时的阻力加大甚至粘住风扇叶片从而导致风扇线圈烧坏。所以在日常维护过程中要注意保持机床电气柜的密封和清洁。 1.6 主轴传感器的报警9073(串行主轴错误)
FANUC-0系统报警代码表 1. 程序报警(P/S报警) 报警号报警内容 000 修改后须断电才能生效的参数,参数修改完毕后应该断电。 001 TH报警,外设输入的程序格式错误。 002 TV报警,外设输入的程序格式错误。 003 输入的数据超过了最大允许输入的值。参考编程部分的有关内容。 004 程序段的第一个字符不是地址,而是一个数字或“-”。 005 一个地址后面跟着的不是数字,而是另外一个地址或程序段结束符。 006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或连续出现了两个“-”)。 007 小数点“. ”使用错误。 009 一个字符出现在不能够使用该字符的位置。 010 指令了一个不能用的G代码。 011 一个切削进给没有被给出进给率。 014 程序中出现了同步进给指令(本机床没有该功能)。 015 企图使四个轴同时运动。 020 圆弧插补中,起始点和终点到圆心的距离的差大于876号参数指定的数值。 021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动。 029 H指定的偏置号中的刀具补偿值太大。 030 使用刀具长度补偿或半径补偿时,H指定的刀具补偿号中的刀具补偿值太大。033 编程了一个刀具半径补偿中不能出现的交点。 034 圆弧插补出现在刀具半径补偿的起始或取消的程序段。 037 企图在刀具半径补偿模态下使用G17、G18或G19改变平面选择。 038 由于在刀具半径补偿模态下,圆弧的起点或终点和圆心重合,因此将产生过切削的情况。 041 刀具半径补偿时将产生过切削的情况。 043 指令了一个无效的T代码。 044 固定循环模态下使用G27、G28或G30指令。 046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2)。 051 自动切角或自动圆角程序段后出现了不可能实现的运动。 052 自动切角或自动圆角程序段后的程序段不是G01指令。 053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R。 055 自动切角或自动圆角程序段中,运动距离小于C或R的值。 060 在顺序号搜索时,指令的顺序号没有找到。 070 程序存储器满。 071 被搜索的地址没有找到,或程序搜索时,没有找到指定的程序号。 072 程序存储器中程序的数量满。 073 输入新程序时企图使用已经存在的程序号。 074 程序号不是1~9999之间的整数。 076 子程序调用指令M98中没有地址P。 077 子程序嵌套超过三重。 078 M98或M99中指令的程序号或顺序号不存在。
海湾报警系统型号大全 (1)手动火灾报警按钮 J-SAB-G1(Ex)手动火灾报警按纽 J-SAM-GST9121手动火灾报警按纽 J-SAP-8402手动火灾报警按钮 J-SAF-GST9211(Ex)手动火灾报警按钮 J-SAM-GST9116隔爆型手动火灾报警按钮 J-SAP-8401(船用)手动火灾报警按钮 J-SAP-8401手动火灾报警按钮 J-SAM-GST9122手动火灾报警按钮 J-SAM-GST9116隔爆手动火灾报警按钮(适用氢气或乙炔) J-SAM-GST9116(船用)手动报警按钮 GST-LD-8332(船用) 防爆编码接口箱 (2)消火栓按钮 J-SAM-GST9123消火栓按钮 J-SAM-GST9124消火栓按钮 J-SAF-GST9213(Ex)消火栓按钮 (3)消防警铃 GST-JL警铃 1)火灾报警控制器 JB-QB-GST100火灾报警控制器 JB-QB-GST200壁挂式火灾报警控制器(联动型) JB-QB-GST200立柜式火灾报警控制器(联动型) JB-QB-GST200琴台式火灾报警控制器(联动型) JB-QB-GST500火灾报警控制器(联动型) JB-QG-GST5000火灾报警控制器(联动型) JB-QT-GST5000火灾报警控制器(联动型) JB-QG-GST9000火灾报警控制器(联动型) JB-QT-GST9000火灾报警控制器(联动型) HT-1042AAE-0火灾报警控制器(联动型)触摸屏 JB-QB-GST200(船用)火灾报警控制器(联动型) JB-QB-GST200(船用)火灾报警控制器(联动型) (1)火灾探测器及附件 JTY-GM-GST9611点型光电感烟火灾探测器 JTW-ZOF-GST9712(EX)点型感温火灾探测器 JTY-GD-G3光电感烟火灾探测器 JTF-GOF-GST9713(Ex)点型复合式感烟感温火灾探测器 JTY-GF-GST9711(Ex)点型光电感烟火灾探测器 DZX-02(Ex)本安型定位底座
T WORD ERROR (T 码错误) LOW OIL LEVEL (油位低) SPINPLE FAULT (主轴故障) SPINDLE ALARM (主轴报警) EXTERNAL EMG STOP (急停按钮被按下) AC NOT READY(交流盘未准备好) SPINPLE LUBE FAULT (主轴润滑故障) T CODE ERROR (T代码出错,非法T代码) M CODE ERROR (M代码出错,非法M代码) SERVO NOT READY(伺服未准备好) NC NOT READY(NC没准备好) TURRET FAULT (转塔故障) TURRET LIMIT (转塔限位) DC 24V OPEN (直流24断开) +24V NOT READY(+24V没准备好) GRAR DRIFT (档位漂移) PLEASE AXIS RETURN HOME(轴未回零) PLEASE DRUM RETURN HOME(刀库未回零)AIRPRESSFAILURE(气压故障) UNCL TOOL FALL(松刀失败) AIR PRESSURE DROP (压缩空气压力过低) CLAMP TOOL FALL(夹刀失败) DRUM NOT PARKED(刀库未在原值) X ZERO POINT NOT REACHED (X 轴未回零) Y ZERO POINT NOT REACHED (Y轴未回零) Z ZERO POINT NOT REACHED (Z 轴未回零) 4TH ZERO POINT NOT REACHED (第4轴未回零) X AXIS OVERTRA VL(X轴超限) Y AXIS OVERTRA VL (Y轴超限) Z AXIS OVERTRA VL (Z轴超限) COUNTER SWITCH REEOR (计数开关故障) MASTERT RANSFER OVER TEMP (主变压器过热) Z AXIS NOT A T FIRST REF POSITION (Z轴未在第一参考点)SPINDLE ORIENTA TION FALLURE (主轴定向失败) TOOL DESENT OR TOOL DA TA REEOR (刀具数据错误)PLEASE UNLOAD THE TOOL ON SPRINELK (请卸下主轴上的刀)PLEASE LOAD TOOL ON APINDLE (请装上主轴上的刀) A AXIS UNCLAMP FAIL (A轴松开失败) A AXIS CLAMP FAIL (A轴夹紧失败) DRUM OUT TO APRONDLEIS FALL (刀库摆向换刀位失败) MG SWING OVERLOAD(刀库摆动过载) DRUM BACK PARK IS FALL (刀库摆回原始位失败) TURRENT MOTOR1 OVERLOAD (刀库移动电机过载)COOLANT MOTOR OVERLOAD (冷却泵过载)
故障代码解释及应对措施 1)SRVO–001 SVAL1 Operator panel E–stop 解释:按下在操作员面板或是操作箱上的紧急停止按钮。如果SYST-067(面板HSSB断开连接)警报也同时发生,或是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)和面板(JRS15)通讯异常。主板和面板电路板之间的电缆连接可能松动。或者,电缆,面板电路板或是主板可能有故障。注意: 如果LED指示灯是关闭不发光的,下面的警报也会产生。 SRVO–001 Operator panel E–stop. SRVO–004 Fence open. SRVO–007 External emergency stop. SRVO–199 Control stop. SRVO–204 External (SVEMG abnormal) E–stop. SRVO–213 Fuse blown (Panel PCB). SRVO–277 Panel E–stop (SVEMG abnormal). SRVO–280 SVOFF input 检查显示在示教盒上显示的警报历史。 (措施1):释放在操作员面板或是操作员箱上被按下的紧急停止按钮。 (措施2):确认操面板电路板(CRT16)和急停按钮之间的连接电缆,如果有裸线,则替换电缆。 (措施3):确认连接面板电路板(CRS20或CRS1)和示教盘之间的连接电缆,如果有裸线,则替换电缆。 (措施4):当紧急停止按钮在释放的位置,检查接线端和开关的连接情况,如果没有连通,则是急停按钮的故障。替换开关或操作面板。 (措施5):替换示教盘。 (措施6):替换面板电路板。 注意: 在执行措施7前,完成整个控制器的备份来保存所有程序和设置内容。(措施7):替换主板。 注释:与SRVO-213同时发生时,可能是因为保险丝已经熔断。采取与SRVO-213相同的处理措施。