目标探测与识别技术研究手段调研
目标探测与识别技术的发展状况
目标探测与识别是一门多学科综合的应用技术,它涉及的学科领域有传感器技术、测试技术、激光技术、毫米波技术、红外技术、近代物理学、固态电子学、人工智能技术、海陆空武器技术、引信技术等。它的主要目的是采取非接触的方法探测固定的或移动的目标,通过识别技术,完成对控制对象的控制任务[1]。
目前目标探测的手段有红外热成像、微光夜视、电视摄像、激光测距、毫米波、微波和激光雷达、声探测、紫外探测等主被动监视装置,覆盖了从紫外到无线电波的宽广的电磁波谱。这些装置的综合应用,已能昼夜、全天候范围监视战场和捕获、跟踪目标,并准确定位,成为未来战场夺取信息优势的物质基础。
目标识别的手段主要有光字符识别技术、条码技术、射频识别技术、磁识别技术、语音识别技术、图形识别技术和生物识别技术等。在军事航空领域,对目标的探测定位能力的更高要求已成为航空电子系统不断扩展的需求牵引之一,而现代隐身技术、对地攻击武器技术的不断发展逐步使光电探测设备的地位不断上升。
在军事应用中,目标信息获取技术可能的感知空间覆盖了武器系统可能配置的全部空间,从地球外层到大气层、地面、地下、海面、海下及水下,其波长覆盖整个电磁波谱。
在高新技术弹药上,目标探测也成为一种主要的功能[2]。在“三打”(打武装直升机、打巡航导弹、打隐形机)“三防”(防侦察、防电子干扰和防精确打击)中,目标探测与识别技术发挥着主要的作用。
例:高光谱遥感目标探测识别技术的发展是20 世纪末期以来对地观测技术取得重大突破的又一个主要领域,也是当前遥感技术发展的前沿和热门研究领域。从1983 年第一台高光谱航空成像光谱仪问世以来,各发达国家如美国、加拿大、法国、德国等竞相研究这一技术,经过将近三十多年的发展,迄今为止,国际上已有40 余种航空成像光谱仪处于运行状态,高光谱遥感技术已经在很多领域得到成功的应用,显示出很大的潜力和广阔的发展前景。
目标探测与识别技术的关键技术
目标探测与识别的核心问题是围绕着高时效和准确性这两个要求,通过目标信息的“获取”、“处理”、“显示”、“传输”等途径实现目标“探测”、“识别”和“确认”。发展目标探测与识别技术,高时效和准确性是军事应用的最大特点,也是主要的关键技术[3]。实际上,目标的获得是一个复杂的问题。已经发展了很多模型,但它们常限于极少的军事场景。大多数模型仅部分有效,其原因是在于实际战场的复杂性与多变性。电光成像系统与技术的发展异常迅速,因此对模型进行修正和发展是十分必要的,以便为正确地反映现代光电系统的性能做出判定。
准确性(自动数据采集,彻底消除人为错误)、高效性(信息交换实时进行)、兼容性(自动识别技术以计算机技术为基础,可与信息管理系统无缝联结)则是识别技术的关键所在[3]。
目标识别属于模式识别的范畴,模式识别的前提是获取目标的特征信息,即获得有助于识别的原始信息数据;模式识别的关键是对原始信号进行适当的处理,从原始信号众多特征中求出那些对分类识别最有效的特征,以实现特征空间维数的压缩,即特征的提取与选择[4]。神经网络目标识别系统,将智能置于系统的结构和适应规则中,它的优点不是针对一个问题或一个应用,而是整个问题,它不要求数字化的数据,可将传感器来的信息以相应的形式直接传送到神经网络,系统则能通过例子训练学习,从而识别在各种背景下的目标。识别的前提是高质量的探测。
对于工作在可见光谱区的成像器件来说,景物单元的发射性质通常不太重要,在远红外区,反射辐射的贡献通常可忽略不计,只有目标和背景的发射性质才是重要的。在近红外和中红外区,目标和背景的反射和发射的性质可能都是很重要的。
例:高光谱影像目标探测识别是高光谱信息处理中的重要环节之一,与此同时,高光谱遥感数据具有多、大、快等特点,即波段多(凡十个到几百个),光谱分辨率高(纳米数量级),数据量大(每次处理数据一般在千兆以上),数据率高(从每秒数兆到每秒数百兆),因此,传统的探测识别分析方法难以满足实际应用的需要,目前人们曾提出过许多不同的方法,这些方法主要可以分为两类:光谱探测方
法和特征探测方法。其中光谱探测法的原理简单、计算简洁,但由于各种因素的影响,使目标光谱中往往存在许多噪声,给光谱探测带来一定的困难。而基于特征空间的探测方法如多元统计分析、模糊数学等存在高维数据量带来的计算压力,同时也一定程度上忽略了光谱特征含义。
目标探测与识别技术的发展难点
任何一种目标探测与识别系统都有其应用范围和局限性,不可能是万能的。在当今技术发展条件下,尚没有能力研制出这样一个平台或系统,其波谱范围覆盖紫外一可见光一红外一微波,直到无线电波,且分辨力(空间、时间、波谱、温度)高,并具备从信息获取到信息处理和应用的高准确性、高时效、实时或准实时的能力。
从20 世纪80 年代以来,由于微机、微处理器在鱼雷中得到广泛的应用,如美国MK48 一5 线导鱼雷、英国的虎鱼线导鱼雷和俄罗斯65 型尾流自导鱼雷等通过首侧声纳对目标有尺度分辨能力,可发射复杂波形波束提高对诱饵的欺骗能力,因而具有智能化的明显优点,迫使各主要海军国家研究鱼雷对抗的新技术和新装备,进而在软杀伤技术(如施放干扰器、声诱饵等干扰和诱骗鱼雷)、硬杀伤技术(如采用深弹、水雷、反鱼雷鱼雷等对抗鱼雷)等方面均取得了很大的发展。如英美合作的水面舰艇鱼雷防御计划(SSTD )已开发出传感器鱼雷识别和报警处理器,该系统基于数字处理技术,采用专门研制的算法实现对鱼雷的自动探测、识别和定位。
例:从空间对地观测的角度来说,高光谱遥感信息无论对地物理化特性的深层探索,还是对地物间微小差异的精细识别,以及对自然界的知识发现,都为人类提供了前所未有的丰富信息。随之而来的问题就是:面对如此多的波段,如此海量的光谱图像信息如何去处理,如何从中提取我们需要的信息。
目标探测与识别技术的发展趋势
随着空战装备技术的发展和空袭战术的改进,现代战场上巡航导弹、武装直升机等低空、超低空目标越来越多。这些目标飞行高度低、航线隐蔽,非常难以发现。这种情况,促使防御一方不断采用最新科技成果以改进自己的防空预警系统,从而大大促进了低空、超低空目标预警和侦察技术的发展和进步。
现代目标信息获取与处理系统一般是利用车载、机载(无人机、飞艇)、舰载、星载(低轨、同步)传感器,实现高分辨力、全自动、多光谱、多时相、地球空间信息获取,利用图像处理技术、通信技术、信息融合与提取技术、目标探测与识别技术以及全球定位系统技术和地理信息系统技术,实现信息快速传输、目标地形自动重建、目标自动识别以及战争指挥决策的现代化。
自动目标识别(Automatic Target Recognition , ATR )是一种利用人工智能技术实现对传感器获取的目标特征进行分类和识别的智能化技术,全程不需要人员的干预,是现代战场上武器智能化的重要核心技术。由于真实战场条件下目标容易受到各种背景信息和杂波的干扰,对其进行探测和识别的技术一直是研究的热点。传统的目标识别一一特别是复杂地面背景下的目标识别,需要人工参与决策,限制了武器系统的应用范围。机器人技术在战场上的广泛应用也迫切需要人们开发出无人值守的智能识别技术,以减轻控制人员的工作压力。结合计算机技术和智能技术的自动目标识别技术成为解决这些难题的一种有效途径,成为当前各军事强国优先发展的对象。例:目前实用型成像光谱仪的应用主要集中于航空遥感领域,如:美国的AVllS 、GERIS ,加拿大的FLI 等,而在航天领域,除较为熟知的美国EOS 计划中的中分辨率成像光谱仪(MODIS )和欧空局的中分辨率成像光谱仪(MERIS )之外,Orbimage 公司的Orbview ( 280 波段),日本ADEOS 一且的CLI 遥感器,美国EO 一1 卫星高级陆地成像仪(ALD 都在研制或计划发射中。可见高光谱遥感目标探测识别技术发展趋势倾向于高端、敏感、准确。
参考文献
[1]张河主编.《探测与识别技术》北京理工大学出版社.2005 . 2
[2]王颂康主编.《高新技术弹药》兵器工业出版社.1997
[3] 周立伟主编.《目标探测与识别》北京理工大学出版社.2005
[4]孙即祥主编.《现代模式识别》国防科技大学出版社.2001
[5]张景旭主编.《国外光电系统空间目标探测进展》中国光学与
应用光学出版.2009
[6]丛敏主编.《自动目标识别技术的发展现状及其应用》飞航导弹.1 999
第40卷 第7期 激光与红外Vol.40,No.7 2010年7月 LASER & I N FRARE D July,2010 文章编号:100125078(2010)0720685205?综述与评论?空间目标识别中的激光探测技术 黄 涛1,2,胡惠灵3,胡以华1,2,赵楠翔1,2 (1.脉冲功率激光技术国家重点实验室电子工程学院,安徽合肥230037; 2.安徽省电子制约技术重点实验室,安徽合肥230037; 3.合肥工业大学计算机与信息学院,安徽合肥230009) 摘 要:空间目标探测与识别技术是空间资源开发、空间安全等方向应用的前提条件,同其他 方式相比,激光探测具有其突出的优势。当前传统的空间监视网是以微波雷达和光学望远镜 为基础,激光探测与之相比具有系统简单、效费比高、能探测空间目标多种特征参数的优点。 介绍了激光探测空间目标中的空间目标轨道确定、几何形状估计、对装配的光学设备检测和对 空间目标的振动识别等几种目标识别技术。最后分析了激光探测在空间目标识别中存在的问 题和发展的方向。 关键词:激光探测;空间目标;识别;逆合成孔径;猫眼效应;振动识别 中图分类号:T N149 文献标识码:A Laser detecti on i n the i denti fi cati on of space t arget HUANG Tao1,2,HU Hui2ling3,HU Yi2hua1,2,Z HAO Nan2xiang1,2 (1.State Key Laborat ory of Pulsed Power Laser Technol ogy Electr onic Engineering I nstitute,Hefei230037,China; 2.Key Laborat ory of Electr onic Restricti on,Anhui Pr ovince,Hefei230037,China; 3.Hefei University of Technol ogy,School of Computer&I nf or mati on,Anhui Pr ovince,Hefei230009,China) Abstract:Space targets detecti on and identificati on is a key technol ogy in s pace app licati ons such as s pace security, attack2warning,debris detecti on ect.Among vari ous detecti on t ools,laser technol ogy has its s pecial advantages under certain conditi on.Ce mpaved with the conventi onal s pace surveillance net w ork which is composed of radar and op tical telescope,laser system can get mone infor mati on about the t orget mean while boasts mone compact size,higher efficien2 cy.The paper intr oduces how t o use laser t o deter m ine the orbit of the s pace target,how t o esti m ate the target′s shape thr ough the return signal,and how t o measure the vibrati on s pectru m of the target.A ls o intr oduced is the devel opment and future of the s pace target detecti on and identificati on by laser. Key words:laser detecti on;s pace target;identifying;inverse synthetic aperture;Cat′s eye effect;vibrati on identifica2 ti on 1 引 言 空间目标主要指各种卫星、空间碎片、空间站、航天飞机,中远程弹道导弹,以及进入地球外层空间的各种宇宙飞行物,如彗星和小行星。空间目标探测系统的任务是对重要空间目标进行精确探测和跟踪,确定可能对航天系统构成威胁的目标的任务、尺寸、形状和轨道参数等重要目标特性;对目标特性数据进行归类和分发。空间目标探测不仅可以帮助确定潜在敌人的空间能力,还可以预测空间物体的轨道,对可能发生的碰撞和对己方空间系统的攻击告警等,具有重要的军事价值[1]。 当前的空间目标探测的主要手段是以各种超远程雷达和大口径光学望远镜组成的空间的监视网对空间目标进行探测和跟踪。这种探测方式虽然能够 基金项目:国家自然科学基金项目(No.60672154)资助。 作者简介:黄 涛(1983-),男,硕士研究生,主要从事激光遥感信息处理方面的研究工作。E2mail:tao_online@https://www.doczj.com/doc/f56153744.html, 收稿日期:2010203217;修订日期:2010204207
2006年10月第34卷 第5期 现代防御技术 MODERN DEFENCE TECHNOLOGY O ct.2006 V o.l34 N o.5雷达空间目标识别技术综述* 马君国,付 强,肖怀铁,朱 江 (国防科技大学ATR实验室,湖南 长沙 410073) 摘 要:随着人类航天活动的增加,对于卫星和碎片等空间目标进行监视变得非常重要。为了实现空间监视任务,对空间目标进行识别是非常必要的。对空间目标的轨道特性与动力学特性进行了介绍,对雷达空间目标识别技术的研究现状和发展趋势进行了详细的综述。 关键词:空间目标识别;低分辨雷达;高分辨雷达成像 中图分类号:TN957 52 文献标识码:A 文章编号:1009 086X(2006) 05 0090 05 Survey of radar space target recognition technology MA Jun guo,F U Q iang,X I AO Huai tie,Z HU Jiang (ATR L ab.,N ationa lU n i versity o f De fense T echno l ogy,Hunan Changsha410073,Ch i na) Abst ract:W ith t h e deve l o pm ent of spacefli g ht acti v ity of hum an,surveillance of space tar get such as sate llite and debris beco m es very i m portan.t In or der to i m p le m ent surveillance task,space target recogni ti o n is ver y necessary.Orb it property and dyna m ics property of space targe t are i n troduced,a deta iled sur vey is set forth about current research state and developi n g trend of radar space target recogn iti o n techno l ogy. K ey w ords:space tar get recogniti o n;lo w reso lution radar;h i g h reso lution radar i m aging 1 引 言 自从前苏联发射了第1颗人造地球卫星以来,卫星在预警、通信、侦察、导航定位、监视和气象等方面具有不可替代的优势。随着人类航天活动的增加,空间碎片日益增多,对于卫星等航天器的安全造成极大的威胁,因此对于卫星和碎片等空间目标进行监视变得非常重要。其中空间目标识别是空间监视任务中不可或缺的基本条件,空间目标识别主要是利用雷达等传感器获取空间目标的回波信号,从中提取目标的位置、速度、结构等特征信息,进而实现对空间目标的类型或属性进行识别。 2 空间目标的轨道特性与动力学特性 (1)轨道特性[1,2] 空间目标在轨道上的运动是无动力惯性飞行,本质上空间目标与自然天体的运动是一致的,故研究空间目标的运动可以用天体力学的方法。空间目标在运动时受到地球引力、月球引力、太阳及其他星体引力、大气阻力和太阳光辐射压力等的作用,轨道存在摄动。但是对轨道的实际分析表明,空间目标受到的主要力是地球引力。假设空间目标只是受到地球引力的作用,同时假设地球是一个质量均匀分布的球体,则空间目标与地球构成二体运动系统,开 *收稿日期:2005-12-15;修回日期:2006-01-23 作者简介:马君国(1970-),男,吉林长春人,博士生,主要从事目标识别与信号处理研究。 通信地址:410073 湖南长沙国防科技大学ATR实验室 电话:(0731)4576401
采用视频图像的运动目标检测与识别 相关调研 目标检测是计算机视觉的一个重要组成部分,在军事及工业等领域有着重要的应用前景。运动目标的检测方法主要有光流法,差值法。光流法的计算量很大,实时性和应用性较差。而图像差值法比较简单,实时性较好,是目前应用最广泛,最成功的运动目标检测的方法。图像差值法可分为两类,一类是用序列图像的每一帧与一个固定的静止的参考帧做图像差分,但自然场景不是静止不变的,因而必须不断的更新背景。另一类是用序列图像的两帧进行差分,这种方法无法检测出两帧图像中重合的部分,只能检测出目标的一部分信息。在绝大多数视频监控图像应用中,每一个像素都可以用一个或多个高斯模型近似,因此,高斯背景模型是绝大多数目标检测方法常用的基本模型。 智能视频服务器是飞瑞斯在多年视频分析技术优势的基础上,推出的一系列具有智能视频分析功能的DVS 视频编码设备。智能视频服务器基于DSP、ARM等核心平台,完成前端标准的H.264高压缩率编码,同时完成智能分析功能。 智能视频服务器的最大的创新点在于,这一系列DVS不仅仅提供视频监控的功能,能通过飞瑞斯核心的智能视频分析技术,来感知视频场景内的环境、人和物,并挖掘其中的人(物)行为、状态、身份信息、数量、轨迹等更深层次的元数据信息。 智能视频服务器赋予了视频监控系统智慧的大脑,从此视频监控不仅仅是能看得到,而且还能自己思考,提供更为智能的应用。
https://www.doczj.com/doc/f56153744.html,/products_20_26.html?bdclkid=BztEJhpzcR34JE_Ft948PGoNuxuK0gsc zre7HPa3EhvUMBqk3J
第38卷 第3期 激光与红外V o l.38,N o.3 2008年3月 L A S E R & I N F R A R E D M a r c h,2008 文章编号:1001-5078(2008)03-0300-04·图像与信号处理·空间观测序列图像目标运动成像仿真 陈维真1,张春华2,王学伟2,周晓东2 (1.中国海洋大学信息技术学院,山东青岛266000;2.海军航空工程学院控制工程系,山东烟台264001) 摘 要:研究了空间观测序列图像目标运动性质仿真算法。首先,利用平均轨道根数(T L E)预 测目标和搭载观测相机卫星在真赤道、平春分点(T E M E D)坐标系的位置矢量,通过成像时相 机与目标之间的几何关系对目标的运动性质进行了分析,同时对影响序列图像恒星位置的因 素进行了分析;规范了成像定标中的星等与灰度的转换关系,用16b i t s灰度图像对星图进行仿 真,扩大了星图的动态范围,提高了星图仿真的精度。最后,以搭载天基可见光探测器(S B V) 的美国中段实验卫星轨道为载荷卫星运行轨道,对天基观测序列图像进行了仿真,结果表明本 文给出仿真序列图像与美国公开发表的S B V相机拍摄图像基本一致。 关键词:空间观测;星图模拟;星等;两行轨道根数 中图分类号:T P751 文献标识码:A Mo v i n g T a r g e t S i m u l a t i o n o f S p a c e O b s e r v a t i o n S e r i a l I m a g e s C H E NW e i-z h e n1,Z H A N GC h u n-h u a2,W A N GX u e-w e i2,Z H O UX i a o-d o n g2 (1.O c e a n U n i v e r s i t y o f C h i n a,C o l l e g e o f I n f o r m a t i o nS c i e n c e&E n g i n e e r i n g,Q i n g d a o,266000,C h i n a; 2.D e p a r t m e n t o f C o n t r o l E n g i n e e r i n g,N a v a l A e r o n a u t i a l a n dA s t r o n a u t i c a l U n i v e r s i t y,Y a n t a i264001,C h i n a) A b s t r a c t:Am e t h o d o f s i m u l a t i o nf o r s p a c e t a r g e t m o v i n g s i m u l a t i o nb a s e do ns p a c e-b a s e dc a m e r a i s p r e s e n t e d.T h e T L E s a r e u s e d t o p r e d i c t t h e r e l a t i v ep o s i t i o nv e c t o r b e t w e e nt h e t a r g e t a n dc a m e r a.F r o m t h e g e o m e t r i c p o s i t i o nt h e p a p e r a n a l y s i s m o v i n g c h a r a c t e r i s t i c s o f t h et a r g e t.A t t h es a m et i m e,f a c t o r sw h i c hc a ne f f e c t p o s i t i o n s o f t h ef i x e d- s t a r s a r e c o n s i d e r e d.T h e n,t h e s t a n d a r dt r a n s f o r m a t i o nb e t w e e n t h ep h o t o m e t r i cm a g n i t u d e s a n dt h e g r a y l e v e l i s p u t f o r w a r d.F i n a l l y,s u p p o s i n g t h a t t h e o b s e r v i n g s a t e l l i t e o r b i t i s t h e s a m e a s t h e M S X,t h e a r t i c l e a n a l y z e s t h e m o v e m e n t c h a r a c t e r i s t i c s i n s e r i a l i m a g e s o f t h e t a r g e t.I t h a s b e e n p r o v e n t h a t t h e s i m u l a t e d s e r i a l i m a g e s a r e o f h i g h a c c o r d a n c e t o t h e S B Vo b s e r v a t i o n i m a g e s. K e y w o r d s:s p a c e o b s e r v a t i o n;s t a r i m a g es i m u l a t i o n;p h o t o m e t r i c m a g n i t u d e;t w o-l i n e e l e m e n t s(T L E) 1 引 言 空间目标观测可以在太空中近距离对空间目标进行监视、跟踪和识别,因而成为当前研究的热点。美国第一个空间可见光探测器S B V于1996年发射升空,对于地球同步轨道带上卫星的监视[1],S B V 系统的观测能力就占到整个美国空间监视网观测能力的17.6%。由S B V的成功经验引出了天基空间监视系统(S B S S),S B S S是由4~8颗L E O卫星组成的星座。S B S S将使美国对地球静止轨道(G E O)卫星的跟踪能力提高50%。此外,美国还将发展轨道深空成像仪(O D S I)系统,该系统为一高轨星座,能够对G E O进行特性识别。加拿大国防部也启动了空间目标监视计划,主要用于跟踪地球同步轨道上通信卫星和其他高轨卫星[2]。英国S U R R Y大学于2000年发射了实验小卫星,获得了空间目标的光学图像。日本于2003年曾发射了空间垃圾回收卫星,具备空间观测能力。德国波恩大学开展的空间监视有效载荷技术研究,已取得了丰富成果。 作者简介:陈维真(1960-),女,工程师,主要研究方向为信息处理等。 收稿日期:2007-09-06
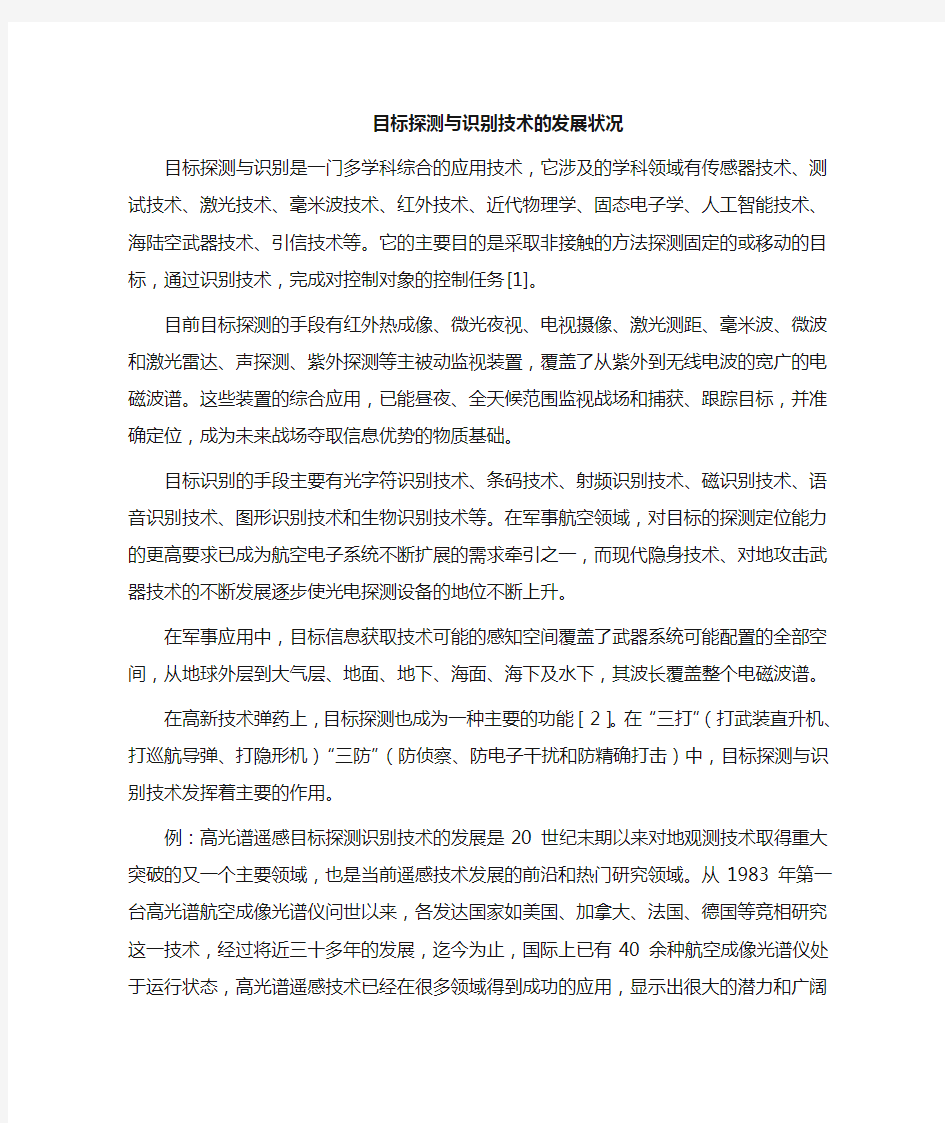
一、传统目标检测方法 如上图所示,传统目标检测的方法一般分为三个阶段:首先在给定的图像上选择一些候选的区域,然后对这些区域提取特征,最后使用训练的分类器进行分类。下面我们对这三个阶段分别进行介绍。 (1) 区域选择这一步是为了对目标的位置进行定位。由于目标可能出现在图像的任何位置,而且目标的大小、长宽比例也不确定,所以最初采用滑动窗口的策略对整幅图像进行遍历,而且需要设置不同的尺度,不同的长宽比。这种穷举的策略虽然包含了目标所有可能出现的位置,但是缺点也是显而易见的:时间复杂度太高,产生冗余窗口太多,这也严重影响后续特征提取和分类的速度和性能。(实际上由于受到时间复杂度的问题,滑动窗口的长宽比一般都是固定的设置几个,所以对于长宽比浮动较大的多类别目标检测,即便是滑动窗口遍历也不能得到很好的区域) (2) 特征提取由于目标的形态多样性,光照变化多样性,背景多样性等因素使得设计一个鲁棒的特征并不是那么容易。然而提取特征的好坏直接影响到分类的准确性。(这个阶段常用的特征有SIFT、HOG等) (3) 分类器主要有SVM, Adaboost等。 总结:传统目标检测存在的两个主要问题: 一是基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余; 二是手工设计的特征对于多样性的变化并没有很好的鲁棒性。 二、基于Region Proposal的深度学习目标检测算法 对于传统目标检测任务存在的两个主要问题,我们该如何解决呢? 对于滑动窗口存在的问题,region proposal提供了很好的解决方案。region
proposal(候选区域)是预先找出图中目标可能出现的位置。但由于region proposal 利用了图像中的纹理、边缘、颜色等信息,可以保证在选取较少窗口(几千个甚至几百个)的情况下保持较高的召回率。这大大降低了后续操作的时间复杂度,并且获取的候选窗口要比滑动窗口的质量更高(滑动窗口固定长宽比)。比较常用的region proposal算法有selective Search和edge Boxes,如果想具体了解region proposal可以看一下PAMI2015的“What makes for effective detection proposals?” 有了候选区域,剩下的工作实际就是对候选区域进行图像分类的工作(特征提取+分类)。对于图像分类,不得不提的是2012年ImageNet大规模视觉识别挑战赛(ILSVRC)上,机器学习泰斗Geoffrey Hinton教授带领学生Krizhevsky使用卷积神经网络将ILSVRC分类任务的Top-5 error降低到了15.3%,而使用传统方法的第二名top-5 error高达26.2%。此后,卷积神经网络占据了图像分类任务的绝对统治地位,微软最新的ResNet和谷歌的Inception V4模型的top-5 error降到了4%以内多,这已经超越人在这个特定任务上的能力。所以目标检测得到候选区域后使用CNN对其进行图像分类是一个不错的选择。 2014年,RBG(Ross B. Girshick)大神使用region proposal+CNN代替传统目标检测使用的滑动窗口+手工设计特征,设计了R-CNN框架,使得目标检测取得巨大突破,并开启了基于深度学习目标检测的热潮。 1. R-CNN (CVPR2014, TPAMI2015) (Region-based Convolution Networks for Accurate Object d etection and Segmentation)
动态视频目标检测和跟踪技术 传统电视监控技术只能达到“千里眼”的作用,把远程的目标图像(原始数据)传送到监控中心,由监控人员根据目视到的视频图像对现场情况做出判断。智能化视频监控的目的是将视频原始数据转化为足够量的可供监控人员决策的“有用信息”,让监控人员及时全面地了解所发生的事件:“什么地方”,“什么时间”,“什么人”,“在做什么”。将“原始数据”转化为“有用信息”的技术中,目标检测与跟踪技术的目的是要解决“什么地方”和“什么时间”的问题。目标识别主要解决“什么人”或“什么东西”的问题。行为模式分析主要解决“在做什么”的问题。动态视频目标检测技术是智能化视频分析的基础。 本文将目前几种常用的动态视频目标检测方法简介如下: 背景减除背景减除(Background Subtraction)方法是目前运动检测中最常用的一种方法,它是利用当前图像与背景图像的差分来检测出运动目标的一种技术。它一般能够提供相对来说比较全面的运动目标的特征数据,但对于动态场景的变化,如光线照射情况和外来无关事件的干扰等也特别敏感。实际上,背景的建模是背景减除方法的技术关键。最简单的背景模型是时间平均图像,即利用同一场景在一个时段的平均图像作为该场景的背景模型。由于该模型是固定的,一旦建立之后,对于该场景图像所发生的任何变化都比较敏感,比如阳光照射方向,影子,树叶随风摇动等。大部分的研究人员目前都致力于开发更加实用的背景模型,以期减少动态场景变化对于运动目标检测效果的影响。 时间差分时间差分(Temporal Difference 又称相邻帧差)方法充分利用了视频图像的特征,从连续得到的视频流中提取所需要的动态目标信息。在一般情况下采集的视频图像,若仔细对比相邻两帧,可以发现其中大部分的背景像素均保持不变。只有在有前景移动目标的部分相邻帧的像素差异比较大。时间差分方法就是利用相邻帧图像的相减来提取出前景移动目标的信息的。让我们来考虑安装固定摄像头所获取的视频。我们介绍利用连续的图像序列中两个或三个相邻帧之间的时间差分,并且用阈值来提取出视频图像中的运动目标的方法。我们采用三帧差分的方法,即当某一个像素在连续三帧视频图像上均有相
收稿日期:2005-06-01; 收修改稿日期:2005-09-07 天基空间目标探测技术探讨 谭莹 (武汉大学电子信息学院,武汉430079) 摘 要 天基空间目标探测系统可以在太空中近距离地对空间目标进行监视、跟踪和 识别,因而成为当前研究的热点。文章分析了国内外天基空间目标探测技术研究概况,对其发展趋势进行了探讨。 主题词 空间目标 天基监视跟踪系统 探测 1 引 言 目前国际上使用的空间目标的观测设备主要都是地面设备。地面观测设备由于不受体积和质量等限制,可以采用大口径天线来得到很高的空间分辨率,以及以很大的发射功率来获得很远的观测距离,所以仍然是目前空间目标观测的有力武器。但是地面设备也有其局限性,除了受仪器本身发展的限制外,观测过程中还受到大气传播抖动、蒙气差、电离闪烁等因素的影响,而且观测信号在大气中的衰减使其频率只能在较低的频率范围内选择,使得对小尺度的目标以及目标细节的观测受到限制。目前对于中小尺度的空间碎片在地面观测还是盲区,利用天基观测设备则可以有效地解决这些问题。而且对于高轨道上的空间目标的观测,利用天基探测设备更加有效,特别是对于对地观测有重要意义的地球同步轨道。随着微小卫星技术的发展,灵活多样的小卫星也为天基探测在大范围开展提供了支持,降低了天基观测的门槛[1]。 下面介绍国内外天基空间目标探测技术研究概况。 2 天基空间目标监视系统发展现状 为了克服地基系统的各种缺点,美国等航天大国部署了天基空间目标监视系统[2,3] 。该系统包 括一个专用天基传感器。它被称为天基可视传感器(S BV ,Space Based V isible )[4]。S BV 传感器在 1996年由弹道导弹防御组织(BMDO ,Ballistic m issile Defense Office )发射的中程空间实验(MSX,M id 2course Space Ex peri m ent )卫星运送至轨道。MSX 卫星的遥感器波长为016 μm ~26μm ,覆盖紫外到超长波红外谱段,另外还装有CCD 可见光遥感器。该卫星发射于1996年,用于跟踪导弹,完成原定使命后被用来加强“地基空间侦察系统”。 图1是安装在MSX 卫星上的天基可见光传感器,这是第一个天基空间探测传感器,由美国麻省理工学院林肯实验室设计和完成[5~10]。 美国正在研制的天基空间目标监视(S BSS,Space 2Based Space Surveillance )系统是美国为提高对空间目标监视、跟踪和识别能力,增强对空间战场态势的实时感知能力而研制的支持空间型天战武器装备。美国希望S BV 能够坚持到第一颗S BSS 卫星开始在太空中运转。5 2006年第3期 空间电子技术S PAC E ELEC TRON I C TECHNOLO GY
水下目标搜索与识别技术 水下目标搜索与识别系统一般分为光视觉系统和声视觉系统,当距离物体十米以内,一般采用光视觉系统,当距离物体大于十米以上时则用声视觉系统。当前流行的趋势是采用激光的方式来进行目标搜索与识别。 一.光视觉系统 传统的光视觉系统包括水下摄像机、照明等设备用来满足获取光学图像和视频信息等基本的要求。而现在的光视觉系统不仅要求满足上述要求,还要求具备对图像和视频信息进行处理、特征提取以及分类识别的功能。总之,只能水下机器人中光视觉系统的使命是:快速、准确德获取水下目标的相关信息,并对信息进行实时处理,将处理结果反馈给计算机,从而指导机器人进行正确的作业。 1.光视觉系统框架 水下光视觉系统主要分为三大块:(1)底层模块:图像采集系统,包括专用水下CCD感光摄像头和图像采集卡,这部分属于硬件部分;(2)中层模块:图像处理,包括图像预处理、图像分割、特征提取、根据目标模型进行学习,形成知识库和逻辑推理机制,得到单幅图像的初步理解和评价。(3)高层模块:分类是水下目标识别最为核心的技术,也是最终实现部分。 1.1硬件组成 光视觉系统硬件包括光视觉计算机、水下CCD摄像头、云台和辅助照明灯。光视觉计算机完成视觉建模、高层视觉信息处理和理解、与机器人主控计算机的网络通讯,实时监控系统每个时间节拍的运行状态与处理参数。 1.2软件体系 水下光视觉系统的软件体系涵盖了两个部分:中层模块和高层模块。中层模块主要负责图像处理工作(图像处理一般包括图像预处理、图像分割和特征提取三方面)。高层模块是水下目标识别系统的最终实现部分,一般采用的是神经网络识别算法进行识别分类。 二.声视觉系统 理想的声视觉系统作为智能水下机器人的传感设备,应该具备灵敏度高、空间分辨率高、隐蔽性好、抗干扰能力强、自主调节和全天候作业等特点,能适合
近空间目标探测技术的分析与展望 解放军信息工程大学信息工程学院通信工程系 吴 江 [摘 要]近空间飞行器以其独特的优势成为当前军事通信与侦察研究的热点之一,对近空间目标的探测问题成为新的研究方向。文中介绍了近空间飞行目标的主要类型和目标探测的特殊性,讨论了可以利用的主要探测手段,指出基于电磁波辐射的无源探测是较有发展前景的近空间探测类型,并对其关键问题和重点研究方向进行了总结和展望。[关键词]近空间飞行器 目标探测 定位 无源探测 1.引言 近空间(near space)是指介于普通航空飞机的飞行空间和航天器轨道空间之间的区域,这一空间区域的高度处于目前绝大多数防空导弹杀伤区之外[1]。近空间飞行器具有可长时间执行任务、可保持在目标地域上空等优点,它们提供与卫星相似的功能,但与卫星相比部署快、造价低、机动性强、在对地观测时有距离优势,并且在执行情报搜集和通信中继任务时可实现广域覆盖[2]。在美军“2006年联合远征部队试验”作战演习中,作战气球Com bat SkySat为改善地面通信能力发挥了重要作用,验证了近空间的实战应用价值[3]。近空间飞行器系统成为一项新兴的增进通信、情报、监视、侦察能力的技术手段,它必将会在未来局部战场大显身手,因而近空间及相应的飞行器系统成为最新的军事技术研究热点之一。 新的空间作战领域的开发给目标探测带来了新的课题,即如何对近空间飞行目标进行探测的问题。近空间处于无管制空域,对目前的防空监视系统来说近乎盲区[4],未来越来越多的飞行器在该空域的活动将对其它主权国家的信息安全和国土防卫带来严重威胁。探索对近空间飞行目标的定位、跟踪和识别的技术方法势在必行。 2.近空间目标特征 2.1近空间飞行器的主要类型 目前已知的可用于近空间的飞行器系统的类型有高空气球、无人机、飞艇和一些新型飞行器。 自由漂浮式高空气球应用于气象和科学实验的实践由来已久,但对其军事价值的开发才刚刚开始,Com bat SkySat就是一种携带信号转发装置的高空气球,它完成了近空间应用的概念演示[3]。气球的主要缺点是它对天气过于敏感,用途受到了限制。然而高空气球毕竟是最为廉价的近空间飞行器,如果能解决快速部署、定向漂移、姿态控制等问题,它将是性价比极高的近空间飞行器类型。 典型的高空无人机是美国诺斯罗普?格鲁门公司的RQ-4“全球鹰”(Global H aw k),该机的使用高度为19.8~20千米,处于近空间最底层。它的翼展35.4米超过波音747飞机,长13.5米,最大飞行速度644千米 小时,最大起飞重量11622千克。美军方认为,与气球或飞艇相比,高空长航时无人机是美空军在近期内,利用“近空间”这一尚未全面、系统地开发和利用的空域,执行持久高空监视,情报搜集和通信中继等任务的最好选择[4]。到2010年之前,它在执行高空持久任务方面将成为低轨道侦察卫星可行的替代手段。 高空飞艇是悬浮式飞行,所需动力较小,利于长航时工作。姿态可控性使飞艇容易保持在某一固定地域上空。但目前还需要等待有关技术取得进步后才具备可行性。高空飞艇是一种很有前景的近空间飞行器选择。 2.2近空间目标的探测条件 (1)特殊的工作高度 近空间高度范围为19.8~100千米,包括大部分平流层,全部中间层和部分电离层。这一高度给针对航空目标进行探测的现有系统带来了新的困难。在近空间内除飞行器自身的电磁辐射外,还存在GPS等导航卫星信号、通信卫星信号、短波信号、对空雷达信号等电磁能量。对近空间电磁环境影响最大的是高度为50~1000千米以上的电离层。电离层含盖了近空间较高的大部分空域,它以多种方式影响电波传播,从而影响探测信号。对于陆基和空基探测平台,来自目标的电磁波还会受到对流层折射与散射的影响[5],给目标定位带来一定误差。 (2)大部分飞行器为低速运动目标 除无人机外,与传统的航空器相比近空间飞行器在工作时移动速度比较慢,甚至保持对地静止。这是因为气球、飞艇等利用空气浮力的飞行器难以达到较高飞行速度,而且在局部应用中往往需要保持对某一地域的持续照射。这使得定位跟踪问题可以得到一定程度的简化,但也限制了基于多普勒频率检测的目标探测方法的应用。 (3)空间径度较大 为在空气极其稀薄的高度获得满足实用的有效负荷,近空间飞行器的体积远超过了普通的航空器,这使目标对外部电磁辐射产生反射的机会增大,即其雷达散射截面(RCS)较大,这对目标探测来说是一个有利因素。 3.对近空间目标的探测手段 由于高度和天候因素影响,基于地面和空中光学系统的探测比较困难。近空间目标多采用太阳能供电,与飞机或导弹目标相比,也难以用红外探测系统达到较好效果。利用电磁波探测目标的技术具有作用距离远、受天候影响小、技术相对成熟、系统造价较低等优点。考虑到近空间飞行器的特征,电磁探测将是近空间目标探测的主流技术方向。 在现代雷达中,有源雷达占据了主导地位,近年来推广和应用了各种新技术。然而传统雷达的有源探测体制有其固有的弱点,首先,为了实现对近空间目标的观测,必须大幅度增加信号发射功率,势必需要巨大的能耗;其次,由于主动发射大功率探测信号,对于有侦察能力的近空间飞行器来说无异于自我暴露。现代电子对抗技术的发展要求军用探测系统应尽量采用无源(被动式)技术,以避免为敌方提供稳健的定位信息源,同时达到自身隐藏的目的。这种探测系统由于本身不向空间发射电磁波,故隐蔽性、抗干扰性好,可靠性、性价比高,有不少已形成装备,在防务体系中起到了重要的作用[6]。 近空间飞行器担负的重要任务是通信中继、实时侦察等,在工作过程中一般会向外界发射通信信号或探测信号。由于在近空间高度发射信号的广域覆盖性,探测平台可利用目标辐射的信号对其定位和跟踪。无源探测一般不能获得辐射源的距离信息,定位的实现方法通常可采用单个运动的平台对辐射源的参数进行连续测量,或用多站平台同时测量辐射源的角度或信号到达时间差来完成。当飞行器处于静默期、探测平台处于其通信覆盖区域之外或飞行器本身是无能量辐射的侦察类应用时,可利用近空间存在的其它电磁波作为照射源对其进行定位、跟踪和识别。这类技术所用的外辐射源主要有调频广播和电视信号、空间卫星下行信号和其它主动式雷达照射信号。目前利用外辐射源进行目标探测的研究方兴未艾,其主流技术有多种,如借鉴双基地雷达技术的探测法、无源相干定位法、基于阵列天线的定位法等[7]。考虑到反侦察的需求,近空间飞行器的通信方式将较多采用突发、短时信号,信号的发射也将具有指向性,甚至可能 — 6 1 —
CVPR2016目标检测之识别效率篇:YOLO, G 1.YOLO: You Only Look Once:Unified, Real-Time Object Detection YOLO是一个可以一次性预测多个Box位置和类别的卷积神经网络,能够实现端到端的目标检测和识别,其最大的优势就是速度快。事实上,目标检测的本质就是回归,因此一个实现回归功能的CNN并不需要复杂的设计过程。YOLO没 有选择滑窗或提取proposal的方式训练网络,而是直接选用整图训练模型。这样做的好处在于可以更好的区分目标和背景区域,相比之下,采用proposal训练方式的Fast-R-CNN 常常把背景区域误检为特定目标。当然,YOLO在提升检测速度的同时牺牲了一些精度。下图所示是YOLO检测系统流程:1.将图像Resize到448*448;2.运行CNN;3.非极大抑制优化检测结果。有兴趣的童鞋可以按照 https://www.doczj.com/doc/f56153744.html,/darknet/install/的说明安装测试一下YOLO的scoring流程,非常容易上手。接下来将重点介绍YOLO的原理。 1.1 一体化检测方案 YOLO的设计理念遵循端到端训练和实时检测。YOLO将输入图像划分为S*S个网络,如果一个物体的中心落在某网格
(cell)内,则相应网格负责检测该物体。在训练和测试时,每个网络预测B个bounding boxes,每个bounding box对应5个预测参数,即bounding box的中心点坐标(x,y),宽高(w,h),和置信度评分。这里的置信度评分 (Pr(Object)*IOU(pred|truth))综合反映基于当前模型bounding box内存在目标的可能性Pr(Object)和bounding box预测目标位置的准确性IOU(pred|truth)。如果bouding box内不存在物体,则Pr(Object)=0。如果存在物体,则根据预测的bounding box和真实的bounding box计算IOU,同时会预测存在物体的情况下该物体属于某一类的后验概 率Pr(Class_i|Object)。假定一共有C类物体,那么每一个网格只预测一次C类物体的条件类概率Pr(Class_i|Object), i=1,2,...,C;每一个网格预测B个bounding box的位置。即这B个bounding box共享一套条件类概率Pr(Class_i|Object), i=1,2,...,C。基于计算得到的Pr(Class_i|Object),在测试时可以计算某个bounding box类相关置信度: Pr(Class_i|Object)*Pr(Object)*IOU(pred|truth)=Pr(Class_i)* IOU(pred|truth)。如果将输入图像划分为7*7网格(S=7),每个网格预测2个bounding box (B=2),有20类待检测的目标(C=20),则相当于最终预测一个长度为 S*S*(B*5+C)=7*7*30的向量,从而完成检测+识别任务,整个流程可以通过下图理解。
目标探测与识别技术调研报告 摘要:目标检测与识别在军事上对于战场监视和侦察具有重要作用,是现代高科技战争中赢得战争胜利的关键因素之一。目标检测与识别就是对目标及环境的探测、识别、跟踪、定位,提供目标的信息,探测技术包括微光夜视技术、热成像技术、激光技术、兵器雷达技术等目前各国对目标检测与识别的研究都十分重视,探测与识别技术在现代国防,工业,医学和空间等领域有着广泛的应用前景。 关键词:探测、识别、跟踪、定位、微光夜视技术、热成像技术、激光技术、兵器雷达技术。 引言:目标检测与识别在军事上对于战场监视和侦察具有重要作用,是现代高科技战争中赢得战争胜利的关键因素之一。目标检测与识别就是对目标及环境的探测、识别、跟踪、定位,提供目标的信息,探测技术包括微光夜视技术、热成像技术、激光技术、兵器雷达技术等。 微光夜视技术 在可见光和近红外波段范围内,将微弱的光照图像转变为人眼可见的图像,扩展人眼在低照度下的视觉能力。微光夜视仪器可分为直接观察和间接观察两种类型。直接观察的微光夜视仪,由物镜、像增强器、目镜和电源、机械部件等组成,人眼通过目镜观察像增强器荧光屏上的景物图像,已广泛用于夜间
侦察、瞄准、驾驶等。间接观察的微光电视,由物镜、微光摄像器件组成微光电视摄像机,通过无线或有线传输,在接收显示装置上获得景物的图像,可用于夜间侦察和火控系统等。1934年,荷兰的霍尔斯特等人制成第一只近贴式红外变像管,树立起人类冲破夜暗的第一块里程碑。随着夜视技术的不断进展,品种不断增多,目前主要有:主动式红外夜视仪、微光夜视仪和热成像仪三种。其中微光夜视仪与主动红外夜视仪相比,有着体积小、重量轻,而且由于工作方式是被动的,使用起来安全可靠,不易暴露的优点;和热成像仪相比虽然在性能上稍逊一筹,但其极高的性价比使其逐渐成为各国军队的主战夜视装备。 主动式红外夜视仪是夜视器材的鼻祖,它的出现使人类第一次看到黑暗中的目标。像增强器研制成功,使得夜视器材的发展产生了一个新飞跃。而利用微弱的光线进行观测,是因为两个技术上的重大突破。首先,研制成功了灵敏度极高的光电阴极(S-20多碱光电阴极),使得夜视仪的光电增益大大提高。另一个突破是采用了光学纤维面板,大大提高了成像质量,将光线逐级放大,便实现了无须红外照明的微光观测。到1998年,就在美国陆军与利顿和ITT公司签订合同之际,第三代管的性能似乎已经达到了极限,然而利顿在投标中却又抛出了撒手锏——无膜微通道板像增强器。自动门控允许像增强器在照明区域和白天仍产生对比度良好的高分辨率影像,而不是产生模糊的影像。这个特点对陆军直升机驾驶员来说特别重要,因为驾驶员在城镇、村庄上空飞
空间已成为当今维护国家安全和国家利益必须关注和占据的战略“制高点”,获取空间优势和控制空间将是未来战争中决定胜负的关键因素。随着空间军事化的加剧,由防御性和进攻性对抗构成的空间对抗作战,将进一步依赖于强大的空间态势感知和空间目标监视系统。 什么是空间态势感知 美国战略司令部将空间态势感知定义为:为确保指挥官、决策者、规划及作战人员获取和维持空间优势,必须具备的对空间事件、空间威胁、空间活动、空间环境以及空间系统(状态、能力、约束和部署)等信息的掌控和预测能力。美国2010年发布的《空间态势评估中期报告》归纳了空间态势感知的4个主要功能:①探测、跟踪与识别空间目标。②威胁预警与评估。预测和区分潜在攻击和实际攻击,分析空间气象环境影响以及空间系统的异常。③情报描述。确定对手当前以及未来的空间系统、空间对抗系统的性能和特征,以及对手的意图。 ④数据融合。关联和综合多源数据形成一个通用的作战态势图,支持动态决策过程。 空间态势感知包括4个子任务领域:空间监视与侦察、空间环境监测(em)、空间情报以及指挥与控制。空间监视与侦察是指确定卫星与碎片的位置数据、目标机动,对特定空间目标进行详察;空间环境监测是指确定空间环境及其影响,包括太阳风暴、流星雨、高层大气、磁气层、电离层和人工环境效应等;空间情报是利用多种传统情报资源手段,了解对手卫星的特性、能力、意图、用户与网络以及相关的天基、地基威胁信息;指挥与控制最具挑战性,需要收集、融合空间目标与环境信息,构建一体化空间态势图,及时进行分发。 空间目标监视是指对空间目标进行探测、跟踪、识别以及编目。空间目标包括运行的、废弃的卫星、使用过的火箭箭体以及空间碎片等。空间目标监视既是空间目标管理的基础,同时又是空间环境感知、敌我识别、军事化行动和其他敏感区域卫星过境预报的必要因素。利用空间目标监视系统,可以实现空间目标编目、空间垃圾监测、空间目标识别和预报以及战略导弹预警等功能。 国外现状 空间目标监视系统一般由传感器(探测设备)、通信及数据传输网络、指挥控制系统以及数据处理等部分组成。当前,美国拥有最先进的空间目标监视系统,是空间监视数据的主要提供者。俄罗斯也具备较强的能力。此外,欧洲及其他一些国家和地区也具备一定的空间监视能力。 美国空间日标监视系统 美国最主要的空间目标监视系统是“空间监视网”(ssn)以及“天基空间监视系统”(sbss)等。 “空间监视网” 美国“空间监视网”是世界上最先进的空间目标跟踪与编目系统,由分布在世界各地的29部雷达及光学探测器组成。ssn支持“联合空间作战中心”(jspoc)任务,用于探测、跟踪、识别和编目围绕地球的空间目标,能够可靠地跟踪10厘米以上的低地球轨道目标和1米以上的同步地球轨道目标。 “空间监视网”探测器的任务是向位于范登堡空军基地的jspoc以及位于达尔格伦的“备用的空间控制中心”(ascc)提供空间监视和空间目标识别数据。由于ssn探测器数量有限以及分布位置的原因,无法对空间目标进行连续跟踪,因此并不是随时对所有的轨道面进行搜索,而是通过对探测器进行规划和任务分配,对目标进行周期性的“点查”。同时,为更有效地利用ssn有限的跟踪资源,jspoc采用了一种称为“探测器跟踪优先级排序”的方法,北美航空航天防御司令部和战略司令部针对不同的卫星和轨道,定义了优先级的种类和具体的数据采集说明。一般来说,执行高感兴趣任务卫星和不稳定轨道的目标具有更高的优先级和数据采集需求。