基于VISSIM的交叉口感应信号控制仿真研究
陈扶崑,吴中
河海大学交通学院,江苏南京(210098
E-mail:fukunchen163@https://www.doczj.com/doc/f55357861.html,
摘要:首先介绍了感应信号控制原理及其主要参数确定方法,并对微观交通仿真软件VISSIM及车辆感应控制编程(V AP进行了简单说明。以南京市某一典型十字型信号控制交叉口为例,用VISSIM仿真软件作为平台,对该交叉口进行了感应信号控制设计。以通过交叉口的车辆平均延误,平均停车次数,最大排队长度作为评价指标,对该交叉口在不同交通条件下,进行定时控制与感应控制仿真比较分析。最后得出感应控制所适用的交叉口及交通流状况,并且说明了利用VISSIM实现感应信号控制仿真的可行性及优越性。
关键词:感应信号控制,VISSIM,V AP,微观仿真,交通控制
1.前言
目前,某些发达国家(日本、美国等在感应信号控制方面研究与运用较多,国内这方面研究还处于初级阶段,实际运用到道路交叉口中的感应信号控制比较少。感应信号控制运用到实际交叉口上有较大难度,主要原因是技术与资金问题。但我们并不能否认我国许多城市的交叉口适合用感应信号控制。感应信号控制有其自身的优点:感应控制在交通强度较小交叉口,有其优越性,不致使主要道路上的交通产生不必要的延误;感应信号控制在有几个流向的交通量时有时无或多变的复杂交又口上,可得到最大效益;在交通量变化大而不规则、难于用定时控制处置的交叉口以及必须降低对主要干道干扰的交叉口上,用感应控制效益更大。因为感应控制有上述诸多优点,感应信号控制运用到适宜的交叉口上能够提高交叉口的通行能力,减少延误及
停车次数,能够为整个社会的发展带来效益,所以我们值得对它进行深入研究,并逐步运用到适宜的道路交叉口上。
本文介绍了感应信号控制的基本工作原理,分析了感应信号控制的几种主要形式,并以南京市某一典型十字型信号控制交叉口为例,运用微观交通仿真软件VISSIM对该交叉口在不同交通流情况下采用感应信号控制与定时信号控制进行仿真对比分析,其中利用VISSIM 实现感应控制仿真设计是本文的重点与难点。
2.感应信号控制类型及基本原理
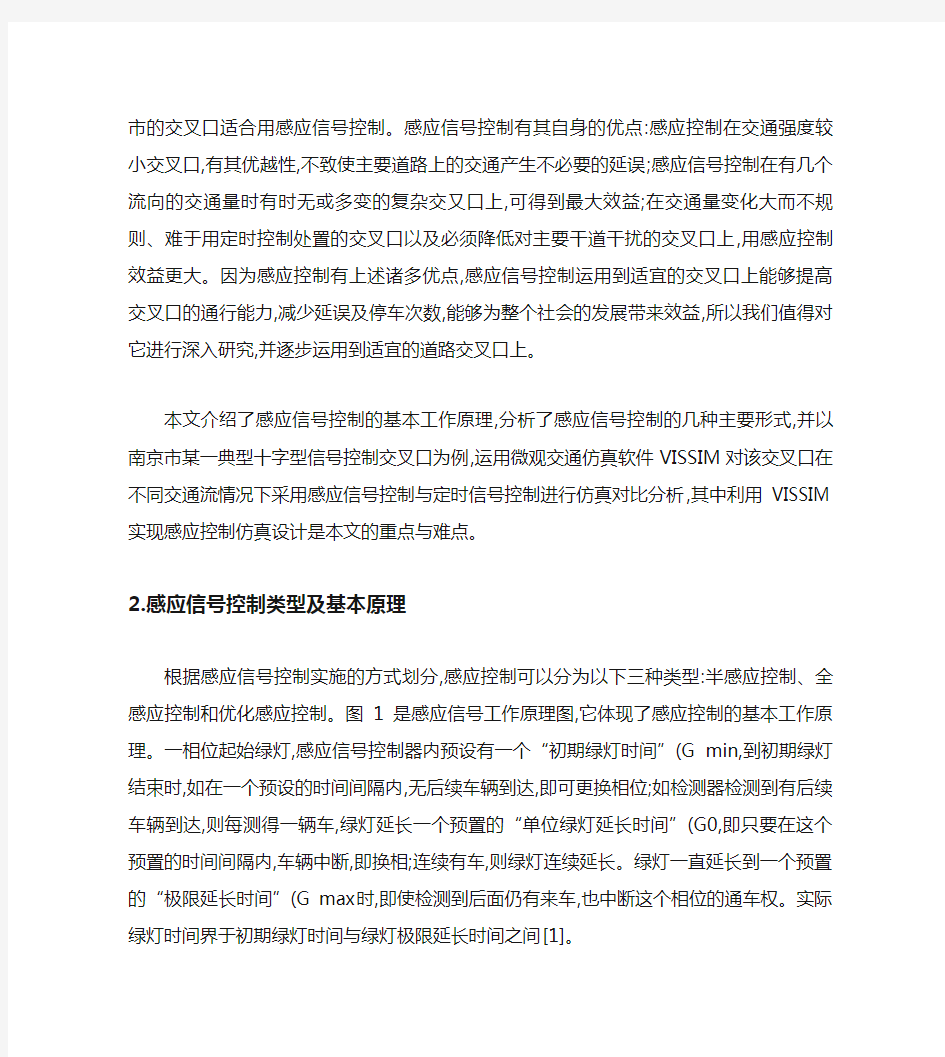
根据感应信号控制实施的方式划分,感应控制可以分为以下三种类型:半感应控制、全感应控制和优化感应控制。图1是感应信号工作原理图,它体现了感应控制的基本工作原理。一相位起始绿灯,感应信号控制器内预设有一个“初期绿灯时间”(G min,到初期绿灯结束时,如在一个预设的时间间隔内,无后续车辆到达,即可更换相位;如检测器检测到有后续车辆到达,则每测得一辆车,绿灯延长一个预置的“单位绿灯延长时间”(G0,即只要在这个预置的时间间隔内,车辆中断,即换相;连续有车,则绿灯连续延长。绿灯一直延长到一个预置的“极限延长时间”(G max时,即使检测到后面仍有来车,也中断这个相位的通车权。实际绿灯时间界于初期绿灯时间与绿灯极限延长时间之间[1]。
图1 感应信号工作原理图
G 0-单位绿灯延长时间;G min -初期绿灯时间;
G max -绿灯极限延长时间;G -实际绿灯时间。
3. 感应信号控制的参数确定
感应信号参数主要包括:初期绿灯时间,单位绿灯延长时间,绿灯极限延长时间。
3.1初期绿灯时间(G min
给每个相位初期预先设置一段最短绿灯时间。设置初期绿灯时间应考虑以下几个因素:
(1保证停在检测器和停车线之间的车辆,全部驶出停车线所需的最短时间。
(2保证行人安全过街所需的时间;
(3我国还需考虑保证红灯时停在停车线前的非机动车安全过街所需的时间
初期绿灯时间由车辆初始阶段(初始绿灯时间和单位绿灯延长时间组成。初始绿灯时间必须保证积存在检测器和停车线之间的车辆驶入交叉口。
在欠饱和状态下,可以使用相位关键进口道的车队疏散时间(T S
来确定初始绿灯时间。车队疏散时间可以参考公式(1[6]。
m S i
Q T S q =? (1 式中:T S ——相位关键进口道的车队疏散时间,秒;
Q m ——相位关键进口道的最大排队长度,Q m =q i *R ei ,辆;
S——相位关键进口道的饱和流量,辆/秒;
q i ——相位i 关键进口道的到达率,辆/秒;
R ei ——相位i 的等效红灯时间,秒。
所以一个相位初期绿灯时间=初始绿灯时间(T S +单位绿灯延长时间
3.2单位绿灯延长时间
是初期绿灯时间结束后,在一定时间间隔内,测得有后续车辆到达时所延长的绿灯时间,确定单位绿灯延长时间时,一般考虑以下几个因素:
(1单位绿灯延长时间的长短必须能使车辆从检测器开出停车线。
(2单位绿灯延长时间的恰当长度,应尽可能不产生绿灯时间损失。
单位绿灯延长时间可以参考公式 (2[7]
△i = D i / V i (2
式中:△i ——各相位的单位绿灯延时;
D i ——为i 相位关键进口道上检测器与停车线之间的距离,米;
V i——为i相位关键进口道上车流的正常行驶速度,米/秒;
3.3绿灯极限延长时间
绿灯极限延长时间是为了保持最佳绿信比而对各相位规定的绿灯时间延长限度。信号到达绿灯极限延长时间时,强制绿灯结束并改换相位。绿灯极限延长时间,实际上就是按定时信号最佳周期时长及绿信比分配到各个相位的绿灯时间,绿灯极限时间一般定为30~60s[1]。
4.VISSIM仿真软件及其车辆感应控制编程(V AP介绍
VISSIM是德国PTV公司开发的微观交通流仿真系统。该系统是一个离散的、随机的、以1/10秒为时间步长的微观仿真软件。车辆的纵向运动采用了Wiedemann教授的“心理—生理跟驰模型”,横向运动(车道变换采用了基于规则(Rule-based的算法。VISSIM软件能够仿真出车道类型、交通种类、交通信号控制、停让控制等交通运行情况,具有分析、评价、优化道路网络、不同设计方案比较等功能,是分析许多交通问题的有效工具。该软件向用户提供了操作方便的网络元素编辑和参数输入功能,网络元素如路段和车道、公共汽车站停车及让路标志、交通信号灯的位置和编号、车辆检测器的位置和编号、路径选择、不同路径交通量分配比例均可通过系统所提供的各种功能进行设计,另外VISSIM还可实现动态交通分配的仿真优化[2]。
V AP是Vehicle Actuated Programming的简写,即车辆感应控制编程。V AP的控制逻辑用其独有的简单语言来描述。在VISSIM仿真过程中,V AP解译控制逻辑命令,并且控制VISSIM路网中信号灯色的改变。为了进行感应控制仿真分
析,VISSIM首先需导入*.PUA 文件、*.V AP文件和系统文件V AP214.exe。其中*.PUA文件和*.V AP文件的编写是感应信号控制仿真的关键,这两个文件可以在记事本中编写,也可以用专业软件编写。例如PTV公司提供的CROSSING软件和
VisV AP模块提供了*.PUA文件和*.V AP文件的编写功能。图2给出了感应控制所需的文件结构图[3][4]。本文的*.PUA文件是根据V AP的规则,通过记事本编写的;*.V AP文件是通过VisV AP模块编写的文件(*.VV生成的。
图2 感应控制所需的文件结构图
5.仿真环境
本文采用南京市一典型十字型交叉口为例来进行感应控制与定时控制仿真对比分析。交叉口形状如图3所示。信号控制相位分配如图4所示。
图3 交叉口示意图
图4 信号控制相位图
各进口道的车辆种类及所占比例为:小汽车80%,公交车10%,载重汽车10%。其中小汽车平均车速为40公里/小时,公交车平均车速为30公里/小时,载重汽车平均车速为30公里/小时。各进口道的左转车辆比例为20%,右转车辆比例为30%,直行车辆比例为50%。本文定时控制策略:直行相位绿灯为40秒,左右转相位绿灯为20秒,绿灯后的黄灯时间为2秒。
6.感应控制设计
感应控制设计思想:两直行相位最小绿灯15秒,最大绿灯时间为40秒,两左右转相位最小绿灯时间10秒,最大绿灯时间为30秒。当一相位达到最小绿灯时间时,首先判断该相位是否有车辆到来,如果感应器检测有车辆到来,每检测到一辆车,绿灯延长一单位绿灯延长时间(本文根据感应器的铺设位置确定单位绿灯延长时间为9秒,绿灯上限为该相位规定的最大绿灯时间;否则判断下一相位是否有通行需求,有通行需求的条件是:下一相位出现车辆严重排队现象或车辆在停车线前等待超过一定时
间。本文的感应控制相位判断的次序与定时控制相位次序一样,当判断下一相位没有通行需求时,继续判断后面的相位。
实施感应控制的前提是铺设感应器,感应器的种类很多,例如有环形线圈、超声检测器、红外检测器等多种[8],在VISSIM中,所有的这些手段都通过一种方法来表示,当车辆的前端靠近感应器时,感应器会向信号控制器(Signal Controller发送一个脉冲,当车辆的末端离开感应器时,感应器会向信号控制器(Signal Controller发送另外一个脉冲,这些信息最终将由信号控制逻辑(signal control logic来解译[3][4]。针对本文提出的感应信号控制设计思想的需要,本文在各进口车道铺设三类感应器,第一类检测排队长度,距离停车线90米,第二类检测等待时间,距离停车线6米,第三类检测车辆到来,距离停车线30米,如图5所示。
图5 交叉口VISSIM仿真感应器铺设图
图6给出感应信号控制设计流程图,该流程图反映了基本的感应信号控制思想。
https://www.doczj.com/doc/f55357861.html, 图 6 感应信号控制设计流程图 7. VISSIM 微观仿真分析本文在上述感应信号控制设计的基础上,借助 VISSIM 仿真平台,对该交叉口在三种不同交通流条件下进行感应信号控制与定时控制仿真对比分析。每种情况仿真 5 次,每次 3600 秒,最后取 5 次仿真结果的平均值作为最终结果。采用的评价参数是平均延误时间,平均停车次数,最大排队长度。三种情况下的仿真结果见表 1,表 2,表 3。评价指标平均延误(秒)平均停车次数最大排队长度(米)东进口定时 44.7 0.89 96 表 1 各进口道平均到达率为 400 辆/小时的输出结果西进口南进口感应 21.6 0.77 75 定时 43.3 0.87 127 感应 23.4 0.74 91 定时 44.5 0.86 95 感应 25.4 0.71 73 北进口定时 40.8 0.82 81 感应 23.6 0.68 60 评价指标平均延误(秒)平均停车次数最大排队表 2 东西向平均到达率为 400 辆/小时,南北向平均到达率为 1600 辆/小时的输出结果东进口西进口南进口北进口定时 43.8
感应 35.6 定时 45.6 感应 38.2 定时 68.0 感应 44.8 定时 67.8 感应 43.8 0.87 106 0.76 80 0.93 102 0.85 95 1.26 240 1.00 205 1.24 234 1.05 204 长度(米) -6-
https://www.doczj.com/doc/f55357861.html, 表 3 各进口道平均到达率为 1600 辆/小时的输出结果
西进口南进口感应 60.3 定时 66.9 感应 62.1 定时 70.6 感应 67.6 评价指标平均延误(秒)平均停车次数最大排队长度(米)东进口定时 68.0 北进口定时 68.1 感应 65.6 1.29 229 1.00 230 1.21 218 1.13 218 1.22 240 1.24 240 1.28 234 1.28 234 由表 1 可以看出,交叉口各向流量均匀且很小时,三种评价指标均反映了各进口道感应控制效果明显好于定时控制;由表 2 可知,各向流量差异很大(东,西 400 辆/时;南,北 1600 辆/时)时,在交通量较大的南北方向我们可以看出,定时控制下,南北进口道平均延误时间接近 70 秒,平均停车次数达到 1.26 秒,最大排队长度也达到 230 米以上,而感应控制下南北进口道三项评价指标值均明显低于定时控制,同时东西方向的感应控制效果也好于定时控制,此结果说明,在不同流向差异很大时,感应控制能够提高交通流量较大进口道的通过能力;由表 3 可以看出,交叉口各向流量均匀且很大时,定时控制与感应控制下的各进口道平均延误,平均停车次数,最大排队长度都显著增加,虽然感应控制还优于定时控制,
但效果不明显,定时控制与感应控制都有向过饱和状态发展的趋势。以下给出在不同交通流情况下,整个交叉口的感应控制与定时控制总平均延误比较,如图 7 所示(其中交通流 1 为各进口道平均到达率为 400 辆/小时;交通流 2 为东西向平均到达率为 400 辆/小时,南北向平均到达率为 1600 辆/小时;交通流 3 为各进口道平均到达率为 1600 辆/小时)。 80 70 总均误秒平延( 60 50 40 30 20 10 0 定时控制感应控制 1 43.3 23.5 2 60.9 42.6 3 67.5 59.8 定时控制感应控制三种交通流情况图 7 感应控制与定时控制延误比较 8. 结语本文通过运用 VISSIM 微观仿真软件对采用感应信号控制与定时控制不同交通流下南京市某一典型十字交叉口进行仿真对比分析,从仿真的结果可以看出感应控制在轻交通量交叉口或各向交通量差别较大的交叉口,能够有效的降低车辆的延误,减少停车次数,从而提高交叉口的通行能力和服务水平,达到交通通畅的目的;当交叉口交通量接近饱和或过饱和时,感应信号控制的效果不理想,所以在夜间或中午采用感应信号控制,能得
到较好的效果,同时也说明了利用 VISSIM 实现感应信号控制仿真的可行性及优越性。 -7-
https://www.doczj.com/doc/f55357861.html, 本文借助 VISSIM 仿真软件进行交通仿真,在运用VISSIM 软件进行路网构建过程中,充分考虑了现实交通状况,如拐弯处减速、驾驶员的驾驶特性、车辆的加减速度等,其仿真结果是可信的。本文难点部分是VISSIM 中实现感应控制,其中包括*.PUA 文件和*.VV 文件的编写,因为在VISSIM 中实现感应控制还处于探索阶段,所以文中的感应控制设计有一定的缺陷;由于目前关于 VAP 语言编写的参考文献基本没有,所以在论文的完成过程中遇到一些问题不能够很好的解决,比如在 VAP 语言中许多参数只有一个大概范围,要想准确取得这些参数的值,还需参考实践经验,这是在今后研究过程中需要解决的;在考虑车辆构成时,虽然考虑了公交车,但是本文没有考虑公交车的具体路线,这是本文的一点不足,在今后的研究过程中考虑设定公交线路。参考文献 [1]杨佩昆,吴兵. 交通管理与控制.北京:人民交通出版社,2003,89-136 [2] PTV Planung Transport Verkehr AG. VISSIM User Manual-Version 3.70[R]. PTV Corporation, 2003 [3] PTV Planung Transport Verkehr AG. VISSIM Manual – VAP Version 2.14 APPENDIX A: ADD-ON VAP, PTV Corporation, 2003. [4] PTV Planung Transport Verkehr AG. VISSIM Manual – VAP Version 2.14 APPENDIX B: ADD-ON VisVAP, PTV Corporation, 2003. [5]周彤梅.交叉口感应信号控制优化设计研究. 中国人民公交人学学报(自然科学版,2001(2,34-37. [6]Zhili Tian. Capacity Analysis of Traffic-Actuated Intersections.Massachusetts Institute of
Technology,2002:15-22. [7]翟润平. 交通感应控制的信号配时设计方法研究. 公安大学学报(自然科学版 1998(3, 43—46 [8]Elahi S M, Radwan A E, Goul K M. Traffic signal using mixed controller operations. Journal of Transportation Engineering, 1992,116(6:866-879 Study On Actuated Signal Controlled Intersection Based On VISSIM Chen Fukun, Wu Zhong Transportation College, HoHai University, Nanjing (210098) Abstract Firstly, This paper introduces the principles of actuated signal control and the methods of how to determine its main parameters, and also simply explains microcosmic traffic simulation software VISSIM and Vehicle Atuated
programming (VAP. Using a typical four-Intersection in Nanjing as an example. VISSIM simulation software used as a platform for the actuated signal control design of this intersection . This article simulate and analyse the Timing Control and Actuated Signal Control in different traffic conditions by VISSIM simulation software with the vehicle delays, the average number of stops and the largest queue length as the evaluation. Finally this paper achieve the conclusion that what kind of Intersection and traffic flow conditions is fit for Actuated signal control, and note the superiority of the use of VISSIM to achieve actuated signal control simulation. Keywords: Actuated signal control, VISSIM, VAP, microcosmic simulation, Traffic control 作者简介:陈扶崑,男,硕士研究生,主要研究方向是交通规划、交通管理与控制,南京河海大学交通学院。 -8-
v i s s i m教程-CAL-FENGHAI.-(YICAI)-Company One1
第一步导入底图 view background edit 点击load 选择底图点击scale设置尺寸 点击show entire network按钮使地图居中 在底图中按住左键拖动一段距离,弹出如下窗口 :输入这段距离的真实长度绘制道路
点击links&connectors按钮绘制道路 按住右键从路段起始点拖动到结束点,弹出如下窗口 加载材料在vissim安装目录textures 文件夹下 以上参数根据道路实际情况设定 (注意:行车方向为绘图时的绘制方向)
调整道路位置 左键选中一条道路 1.左键按住道路端点处的基点可 拖动道路,从而调整道路的位置 和长度。 2.按住shift可平移道路 3.双击道路可修改参数 删除道路 5.右键单击道路某处可在该处生成折断点,左键拖动折断点可使道路弯曲(如图) 按照上述方法绘制好路段道路和展宽段道路(如图) 渐变段道路连接 两条车道数不相等道路连接(注意:两条道路的行车方向必须一致) 用鼠标右键,按住从一条道路的头拖动到另一条道路的尾(如图)
弹出窗口如下 对应车道的连接按实际情况连接 将所有路段,展宽段,渐变段绘制好以后如图
交叉口内部各车道连接 按照渐变段连接的方法 交叉口内部左直右车道也可用此方法连接 通过拖动折断点来控制车道位置的拐弯半径。 绘好后如图 添加指示标线 点击pavement markers 按钮,左键选择要放置的道路,在需要放置的位置点击右键放置 弹出窗口如图 创建车流组成 点击traffic菜单栏中的compositions
VISSIM交叉口仿真教程(新手版)适合:第一次接触者使用 概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表1 选取编辑选项
图表2 如图读取背景图片 图表3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网:
使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖 第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线
依此连接所有可行的link,为下一步输入车流打好基础。 第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径:
使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果: 图中的红线和绿线即为点击右键的位置。如此,车辆可以向三个方向运行了。当然,必须之前连好的link之间才可以设置路径。 第六步:给出信号灯配时: 首先选取最上边菜单栏的信号控制中的编辑信号控制机选项,得到下图:
第一步导入底图view background edit 点击load 选择底图点击scale设置尺寸 点击show entire network按钮使地图居中 在底图中按住左键拖动一段距离,弹出如下窗口 :输入这段距离的真实长度绘制道路
点击links&connectors按钮绘制道路 按住右键从路段起始点拖动到结束点,弹出如下窗口 加载材料在vissim安装目录textures文件夹下 以上参数根据道路实际情况设定 (注意:行车方向为绘图时的绘制方向)
调整道路位置 左键选中一条道路 1.左键按住道路端点处的基点可拖动 道路,从而调整道路的位置和长度。 2.按住shift可平移道路 3.双击道路可修改参数 4.delete删除道路 5.右键单击道路某处可在该处生成折断点,左键拖动折断点可使道路弯曲(如图) 按照上述方法绘制好路段道路和展宽段道路(如图)
渐变段道路连接 两条车道数不相等道路连接(注意:两条道路的行车方向必须一致)用鼠标右键,按住从一条道路的头拖动到另一条道路的尾(如图) 弹出窗口如下 对应车道的连接按实际情况连接 将所有路段,展宽段,渐变段绘制好以后如图
交叉口内部各车道连接 按照渐变段连接的方法 交叉口内部左直右车道也可用此方法连接 通过拖动折断点来控制车道位置的拐弯半径。 绘好后如图 添加指示标线 点击pavement markers 按钮,左键选择要放置的道路,在需要放置的位置点击右键放置弹出窗口如图
创建车流组成 点击traffic菜单栏中的compositions 弹出窗口 不同的地点的车流有不一样的交通组成和组成比例,比如机动车道有大型车小汽车和bus,而人行道只有行人,非机动车道只有自行车。再比如工业区附近多货车,商业取附近多小汽车。该设置按实际情况设置参数。 加载车流 车流组成设置完毕后,即可将该类型车流加载到道路上 点击按钮vehicle inputs 左键选择需要加载车流的道路,然后在该条路上点击右键,即会在该条路的起始端生成一个出车口。并弹出对话框如图
v i s s i m交叉口仿真教程(新手教学,步骤截 图全过程) -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
VISSIM交叉口仿真教程(新手版) 适合:第一次接触者使用 概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表 1 选取编辑选项 图表 2 如图读取背景图片
图表 3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网: 使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖
第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线
依此连接所有可行的link,为下一步输入车流打好基础。 第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径: 使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果:
《交通仿真》课程实验报告 姓名:杨金龙 学号:1139 年级:2008 专业:交通工程 指导老师:欧振武 T型交叉口路段仿真 一、实验目的 1、熟悉VISSIM软件操作界面 2、掌握运用VISSIM软件创建与连接路段 3、掌握运用VISSIM软件建立路径 4、掌握VISSIM软件交叉口路段仿真参数设置 5、掌握VISSIM软件公交的设置 6、掌握运用VISSIM软件评价功能 二、实验环境 1、计算器系统为Microsoft Windows2000或者XP或者Vista 2、计算机的内存至少512MB 3、VISSIM 在以下环境下运行效果更好 (1)使用计算机硬件允许的最高分辨率 (2)计算器上有安装最新图形适配器的驱动程序 三、实验内容 1、运用VISSIM软件对路段进行创建和连接; 2、在创建好的路段上建立各个路径;
3、对各个路径进行相关的参数设置,对交叉口路段进行仿真; 4、进行信号相位的设置,设置各个相位的红绿灯时间; 5、运用冲突区域集设置无信号控制T型交叉口; 6、在路段合适的位置设置公交车站,建立公交路线,并进行相关参数的设 置; 7、在各个路口定义行程时间和排队记时器并进行评价参数的设置 8、对信号控制的T型交叉口和无信号控制的交叉口进行仿真评价; 9、针对评价的结果进行分析两种交通控制方式的优劣。 四、实验步骤 1、点击“查看”—“背景”---打开UrbanIntersection_https://www.doczj.com/doc/f55357861.html,,将 其作为背景图并设置好图形比例。每车道3.5m,并且将北进口全封闭。 2、按照背景图编辑路段得到如下图 3、定义各个入口的车辆数,每个车道的车辆设置为400辆 4、定义路径并对各个路径设置合理的交通量 5、建立公交车站,采用港湾式,设置发车间隔和发车时间,并对该路段 设置公交路线。结果如图 6、设置信号控制,设定各个相位的红绿灯时间,并在各个路口插入信号 灯,并设置各进口道所对应相位如图,第一相位东左转西右转、第二 相位东西直行、第三相位南进口左转和右转。
交叉口交通信号智能控制的仿真研究 【摘要】本文针对城市交通控制中存在的问题和特征,围绕如何实现合理有效的交叉路口交通信号智能控制问题,对交通信号的优化与控制进行了仿真研究和探讨。以matlab作为仿真软件,通过采集实时交通流数据,建立合理数学模型,进行多次仿真实验,模拟出合理的信号周期时长及绿信比,为解决实际的城市交通问题提供有益的方法和途径。 【关键词】交叉口;交通控制;matlab 0 引言 城市数量随着社会的发展不断增多。大多数城市的基本框架、城市布局与市区道路在历史上早己形成,在我国城市的网格状、环型放射状、自由网络状和混合状几种城市交通网中,普遍存在着中心地区道路狭窄、人口集中、房屋林立的状况,加之市中心大多数又是商业繁华地区、干道汇集之处,存在交通拥挤亦是在所难免。交通拥挤现象日益突出。调查结果显示,目前我国多数城市的行车速度只能维持在10-20km/h左右,有的甚至更低。随着城市化进程的大大加快,交通需求随之急剧增长,供需矛盾不断激化,严重的交通问题也随之而来,而交通拥堵问题是城市道路交通最为迫切的问题。 交通拥堵中一个最重要的表现就是交叉口问题,对交叉口的有效管理是解决交通拥挤问题的关键。最有效的方法之一就是交通信号控制;交叉口必要的、合理的信号控制对于提高路口通行能力、保障交通安全具有重要意义。 1 交通信号控制参数 交通控制[1]是指通过对城市交叉路口信号灯持续时间进行合理控制,使得交通流能够高效驶离交通路口,达到疏导、改善交通流的目的。其主要参数[2]有周期、相位、绿信比、饱和度等。 1.1 周期 用于指挥交通的信号一个循环内所经历的时间称为信号周期长度,简称周期。用C表示。信号周期长度的大小取决于被控交叉口的交通流特性和所采用的控制方式。一般是交通量越大,周期就应该越长;它是一次绿灯(G)、黄灯(A)和红灯(R)显示时间之和,C=G+A+R。 周期的长短是根据车流的稀疏程度来确定的;最小周期、最大周期根据具体的情况取值,整个控制过程中的最佳周期就是使车辆在路口总延误时间最短的周期,也就是每一个相位的绿灯时间刚好能够使该相位各入口处等待车队放行完毕。
目录 欧阳学文 1调查交叉口早或晚高峰相关数据1 1.1调查交叉口早或晚高峰相关数据1 2根据实际调查建立仿真模型3 2.1根据实际调查建立仿真模型3 3.交叉口延误情况3 3.1信号配时3 3.2计算延误的结果为4 4对路口重新评价平均延误5 4.1优化信号配时与渠化设计之后的信号配时5 4.2平均延误5 1调查交叉口早或晚高峰相关数据 1.1调查交叉口早或晚高峰相关数据 根据小组调研数据所得两个路口6个方向车流量分别为
图1 府前东街-顺通路 东方向直行左转右转小汽车54015660 公交车34106 北方向 小汽车1805830 公交车2175 南方向 小汽车1547436 公交车24106 表1 府前西街-新顺南北大街 西方向直行左转右转
2根据实际调查建立仿真模型2.1根据实际调查建立仿真模型 图2 3.交叉口延误情况 3.1信号配时
Vissim仿真模拟在理想条件下的最大车流量方向延误情况No. 1: Travel time section(s) 1 Time; Delay; Stopd; Stops; #Veh; Pers.; #Pers; VehC; All;;;;;; No.:; 1; 1; 1; 1; 1; 1; 600; 72.5 86.4; 0.97; 30; 103.6; 37; Total; 72.5; 86.4; 0.97; 30; 103.6; 37; 3.2计算延误的结果为 运算结果与vissim仿真情况基本一致 加入行人和非机动车仿真出的结果比计算结果多30秒属于正常情况 No.:; 1; 1; 1; 1; 1; 1; 600; 128.7; 112.5; 1.39; 41; 128.7; 41; Total; 128.7; 112.5; 1.39; 41; 128.7; 41;
平面交叉口信号配时仿真实验 第一部分 VISSIM实验系统与功能操作 一、Vissim软件功能简介 Vissim是一种微观、基于时间间隔和驾驶行为的仿真建模工具,用以建模和分析各种交通条件下(车道设置、交通构成、交通信号、公交站点等),城市交通和公共交通的运行状况,是评价交通工程设计和城市规划方案的有效工具。 ●Vissim是解决各种交通问题的有力工具,主要应用包括: 1.公交优先信号控制逻辑的设计、评价和调整。 2.对于有协调和感应信号控制的路网交通控制的评价和优化(Signal97 接口)。 3.城市道路网中轻轨建设项目的可行性及其影响评价。 4.分析慢速交通交织区。 5.对比分析交通设计方案,包括信号控制交叉口和停车标志控制交叉口、环交、和立交的设计。 6.轻轨和公共汽车系统的综合站点布局的容量评价和管理评价。 7.通过Vissim评价公共汽车优先解决方案,如插队、港湾停靠站和公交专用车道。 8.使用嵌入式动态交通分配模型,解决行驶路径选择的相关问题,如不确定信号的影响、对于中等城市而言,交通流分向路网邻近区域的可能性。 ●Vissim软件是交通仿真软件,具体的模拟仿真功能为: 1.模拟交通渠化方案、公交枢纽组织、停车场设置、收费站车流量等各种交通现象。 2.提供一个虚拟平台,在计算机上模拟不同方案的运行结果,提供定量分析指标。 3.提供2D和3D的方案运行动画文件。 4.测试所设计的信号灯情况,给出相关的评价指标,可在线显示信号灯的变化情况。 5.感应模块可以通过检测量的设置,根据流量的不同,来设置感应式的信号灯或交通控制,实现逻辑控制信号等或交通流。 6.Vissim本身带有一套3D模型的数据库,含有各种车辆模型和部分树木房屋等文件。 二、Vissim操作界面简介 打开Vissim软件,界面主要包括标题栏、菜单栏、工具栏和编辑区。
李克平,等:信号控制交叉口行人过街交通组织与控制摘要:行人既是信号控制交叉口交通事故中的弱者,也是交叉口秩序混乱和效率低下的根源之一。首先归纳了行人过街的典型心理和行为特征,分析了影响行人过街行为的诸多因素,包括行人自身特点、环境因素、交通因素、交叉口几何设计因素、信号控制因素、交通执法等。在此基础上提出了交叉口行人过街交通组织和控制的基本原则和基本方法。最后,选择典型交叉口进行行人交通设计案例分析。值得强调的是,为处理好行人交通问题,仅依靠交通工程措施是远远不够的,更需要完善交通法规,加强交通教育和宣传,增强交通执法力度。 Abstract :Pedestrians are not only vulnerable to traffic acci-dents but also the cause of disorderly traffic flow at intersec-tion.By summarizing the characteristics of pedestrian behav-ior,this paper analyzes the influencing factors on pedestrian crossing,such as their physical state,environment factor ,traf-fic factors,intersection layout design,signal control,traffic en-forcement,and etc.Based on the proposed basic principles and methods for pedestrian traffic control at intersections,the pa-per introduces several examples of intersection layout design and signal control.Finally,the paper points out that engineer-ing solution alone are not sufficient.To improve pedestrian safety at intersections,it is necessary to have better traffic laws,enhanced safety education,and powerful enforcement methods. 关键词:交通管理;信号控制交叉口;行人;交通组织;信号控制Keywords :traffic management;signalized intersections;pedes-trian;traffic organization;signal control 中图分类号:U491.5+4文献标识码:A 交叉口处混合交通流相互干扰严重,冲突点多,事故发生率高。我国有40%左右的交通事故发生在交叉口,其中与行人相关的占10%以上[1]。从通行能力角度而言,因行人和非机动车干扰而导致的通行能力损失约为总通行能力的15%左右[2]。由此可见,行人既是交通事故中的弱者,又是交叉口秩序混乱和效率低下的根源之一。 1行人过街违章的原因 我国城市道路中行人随意横穿马路、不在指定处过街、违反交通控制信号等现象屡见不鲜。行人在交叉口违章,干扰机动车正常通行,导致交叉口运行状况陷入“秩序混乱-安全性差和效率低下-延长信号周期-行人违章增加-秩序更加混乱”的恶性循环。一些城市尝试采用强制管理的办法,甚至将违章且不接受管制的行人施以行政拘留,但收效甚微且不可持续。一旦放松管制,立刻回归原状。究其原因,主要有以下几点: 1)现有规范尚缺乏对行人交通的足够重视;关于行人过街的交通法规,还存在一些盲区和误区,比如最基本的关于行人过街灯色的定义。 )我国尚未建立完善的交通安全教育和宣传体制,交通安全教育环节的缺失导 收稿日期:2010-10-20 作者简介:李克平(1960—),男,上海人,博士,教授,博士生导师,同济大学中德交通研究中心主任,主要研究方向:交通信号控制、交叉口规划设计、微观交通仿真分析。_@63城市交通第9卷第1期2011年1月 ■文章编号:1672-5328(2011)01-0065-07 Urban Transport of China,V ol.9,No.1,January 2011 李克平,倪颖 (同济大学交通运输工程学院交通工程系,上海201804) LI Ke-ping,NI Ying (Department of Traf fic Engineer,School of Transportation Engineering,Tongji University,Shanghai 201804) Pedestrian Traffic Control at Signalized Intersections 信号控制交叉口行人过街交通组织与控制 2E -mail:keping li https://www.doczj.com/doc/f55357861.html,
VISSIM 仿真实验 利用AutoCAD软件和鸿业道路6.0 软件对312国道进行合理的局部路网的交通组织,以及平面交叉口进行渠划设计,设计合理的标志标线,并在此基础上进行仿真。获得该路段312国道的V/C值、平均行驶速度、流量等的变化。 1 导入CAD地图文件 建立一个精确VISSIM 模型的必要条件是:至少具有一张具有比例尺的反映现实路网的背景图片。本设计采用312国道局部路网地图,打开步骤如下:1) 依次选择:查看→背景→编辑…,点击加载…,选择导入VISSIM 的目标 图片文件。 2)关闭背景选择窗口,在巡航工具栏中点击显示整个显示整个地图。显示整个地图。 3) 再次打开背景选择窗口,选择待缩放的文件,点击比例尺。此时,鼠标指针变成一把尺,尺的左上角为“热点”。 4) 按住并沿着标距拖动鼠标左键。 5) 释放鼠标输入两点间的实际距离,点击确定,本次设计的所选距离为1400米。 6) 在背景选择窗口中点击起点,可以将背景图片移动到目标位置。按住鼠标左键,可以把背景图片拖到一个新的位置。 7) 依次选择:查看→背景→参数…,点击保存。 2 图形编辑 2.1 路段属性和选项 路段画法步骤如下: 1)在路段的起始位置点击鼠 标右键,沿着交通流运行方向将 其拖至终点位置,释放鼠标。 2)编辑路段数据包括:路段编 号、名称、车道数、路段类型, 是否生成相反方向等。如下图所 示: 2.2 连接器 VISSIM 路网是由相互连接的路段组成的,路段之间需要通过连接器实现
连接。没有连接器的话,车辆是不能从一条路段换到另一条路段。 具体步骤如下: 1)在第一个路段的指定位置(连接器起点) 右击并沿着交通流方向拖动鼠标到第二条路段 的指定位置(连接器终点),然后释放鼠标。 2.)编辑连接器数据,如右图所示,包括起 点路段和终点路段的车道连接状态。车道1 代 表最右侧的车道。和中间点数可以使路段连接平 滑过度等。 2.3 定义减速区 因本次所设计的内容有312国道与一条交通量非常少的支路相交,故在设计过程中在支路与312国道相交处的支路上设置减速区,设置过程如下: 1)选择减速区模式。 2)选择需要设置减速区的路段或 连接器。 3)右击减速区的起点,沿着路段/ 连接器将其拖动到目标位置。 4)释放鼠标,打开创建减速区窗 口。 5). 针对通过该路段/连接器的每 一车辆类型定义合适的车速和加速 度。 6)点击确定。对于多车道路段, 需要为每一条车道分别定义减速区,每条车道可定义不同特性。 7)设置减速区属性及选项包括名称、长度、车道、时间等 设置结果如下图:
目录 1调查交叉口早或晚高峰相关数据 (1) 1、1调查交叉口早或晚高峰相关数据 (1) 2根据实际调查建立仿真模型 (3) 2、1根据实际调查建立仿真模型 (3) 3、交叉口延误情况 (3) 3、1信号配时 (3) 3、2计算延误的结果为 (4) 4对路口重新评价平均延误 (5) 4、1优化信号配时与渠化设计之后的信号配时 (5) 4、2平均延误 (5) 1调查交叉口早或晚高峰相关数据 1、1调查交叉口早或晚高峰相关数据 根据小组调研数据所得两个路口6个方向车流量分别为
图1 府前东街-顺通路 东方向直行左转右转小汽车540 156 60 公交车34 10 6 北方向 小汽车180 58 30 公交车21 7 5 南方向 小汽车154 74 36 公交车24 10 6 表1 府前西街-新顺南北大街 西方向直行左转右转小汽车527 64 292 公交车28 9 5 北方向 小汽车314 116 124 公交车25 12 8
南方向 小汽车408 174 66 公交车24 10 12 表2 2根据实际调查建立仿真模型2、1根据实际调查建立仿真模型 图2 3、交叉口延误情况 3、1信号配时
Vissim仿真模拟在理想条件下的最大车流量方向延误情况 No、 1: Travel time section(s) 1 Time; Delay; Stopd; Stops; #Veh; Pers、; #Pers; VehC; All;;;;;; No、:; 1; 1; 1; 1; 1; 1; 600; 72、5 86、4; 0、97; 30; 103、6; 37; Total; 72、5; 86、4; 0、97; 30; 103、6; 37; 3、2计算延误的结果为 运算结果与
实验一VISSIM基本认识及基本操作实验报告一、实验目的 掌握交通仿真系统VISSIM基本功能的使用。 二、实验原理 以基本路段、出口匝道、无信号平面交叉口为例,练习基本交通仿真操作。 三、实验内容 1、基本路段仿真 2、设置行程时间检测器 3、道路的连接和路径决策 4、冲突区的设置 四、实验步骤 单击菜单栏上的View,选择Options,在Languages&Units下选择Chinese,切换成中文。
1、基本路段仿真步骤 (1)绘制路段:单击“路段&连接器”按钮,切换到路段编辑状态,将鼠标移到视图区,确定任意起点按住鼠标右键,平行向右移动鼠标,在需要的长度放开鼠标右键,路段绘制完成,在弹出的“路段属性”对话框内设置路段属性。车道数设置为“3”,单击“完成”。 (2)流量设置:单击“车辆输入”按钮,切换到路段流量编辑状态,双击路段,在“车辆输入”对话框输入流量“1500”,车辆构成选择“Default”。路段起点出现黑色线段,表示已完成流量设置。
(3)运行仿真:菜单栏单击“仿真”—>“参数”,在弹出的“仿真参数”对话框内调节仿真运行速度,为看清车辆行驶,调小速度为“6仿真秒/s”,单击确定。
2、设置行程时间检测器步骤: (1)单击行程时间,左键单击选中主路段,然后在主路段靠近起点某处右键,出现红色竖线,起点检测器设置完成,
再在靠近终点处右键出现绿色竖线同时弹出“创建行程时间检测”对话框,单击确定。 (2)评价结果输出:菜单栏单击“评价”—>“文件”在评价对话框内勾选行程时间。单击确定。
(3)运行仿真:单击上部工具栏连续仿真按钮,然后结束停止仿真。
信控交叉口半感应控制方案优化研究 摘要感应信号控制不仅可以有效提高道路通行能力,缓解目前普遍存在的交通拥堵问题,还能减少交通事故发生率。针对目前感应控制存在的不足,考虑车辆安全行驶、行人过街时间和周期时长约束条件,建立了最小绿灯时间优化模型。用VISSIM 感应控制模块对模型进行了仿真验证,和传统半感应控制仿真对比,以信号交叉口信号控制延误与相应交叉口服务水平为评价指标,验证模型的有效性。 关键词交通控制;半感应信号交叉口;多相位;控制算法 前言 固定信号控制导致的绿灯时间的损失并不利于提高交叉口的通行效率,人们开始研究并使用信号交叉口感应控制技术来通过管理交叉口信号灯来实时控制交叉口过往的车辆,感应控制在交通量变化大而不规则、难以用定时控制处置的交叉口,以及必须降低对主要感到干扰的交叉口上優势明显,可以极大地降低了交叉口的延误时间,是较好的信号交叉口管理方式。 信号交叉口的感应控制设备、安装维护费用比普通的定时信号控制设备要高,从经济性和实用性的角度考虑,半感应控制的研究是一种比较现实可行的方法,本文研究的是主次道路相交的,在次路上车辆和行人时常中断的交叉口,即信号交叉口的半感应控制,旨在保证次干路车流人流通行的基础上,提高主路车流人流的通行效率,降低主次路交叉口的通行延误,缓解交通拥堵。 1 相关理论 在半感应控制中,交叉口由感应和定时控制控制。半感应控制主要用于主路与支路交叉口的交叉口。根据探测器位置,可分为主路半感应控制和分支半感应控制。在半传感控制的交叉口,探测器的相位不按时间控制进行操作。论文研究的是检测器设置在次路上的半感应控制[1]。 2 感应控制配时参数优化模型 2.1 检测器的埋设 探测器是车辆到达检测的手段,是交通控制系统的信息源,为实现系统的最优控制提供了基础数据。根据探测器的工作原理,探测器类型的成本性能,主要有环形线圈检测器、超声波探测仪、视频图像检测器、磁检测器、微波雷达检测器、光学车辆检测器等,其中环形线圈检测器是最常用的车辆检测器。 为了保证主干道的交通流,探测器被埋在二级公路上。它可以简化信号时序的计算过程,降低检测器的维护量,降低传感器信号的控制成本。通过现场观察,
VISSIM交叉口仿真报告
目录 1. VISSIM简介 ................................................................................................................. 错误!未定义书签。2定义路网属性............................................................................................................... 错误!未定义书签。 物理路网.................................................................................................................. 错误!未定义书签。 准备底图的创建流程...................................................................................... 错误!未定义书签。 添加路段(Links).......................................................................................... 错误!未定义书签。 连接器.............................................................................................................. 错误!未定义书签。 定义交通属性.......................................................................................................... 错误!未定义书签。 定义分布.......................................................................................................... 错误!未定义书签。 目标车速变化.................................................................................................. 错误!未定义书签。 交通构成........................................................................................................ 错误!未定义书签。 交通流量的输入............................................................................................ 错误!未定义书签。 路线选择与转向...................................................................................................... 错误!未定义书签。 信号控制交叉口设置............................................................................................ 错误!未定义书签。 信号参数设置.................................................................................................. 错误!未定义书签。 信号灯安放及设置.......................................................................................... 错误!未定义书签。 优先权设置...................................................................................................... 错误!未定义书签。 冲突区域集.................................................................................................... 错误!未定义书签。3仿真............................................................................................................................... 错误!未定义书签。 参数设置........................................................................................................ 错误!未定义书签。 仿真................................................................................................................ 错误!未定义书签。4评价............................................................................................................................... 错误!未定义书签。 行程时间........................................................................................................ 错误!未定义书签。 数据采集点.................................................................................................... 错误!未定义书签。 排队计数器.................................................................................................... 错误!未定义书签。
交通系统建模与仿真 学院: 专业: 姓名: 学号: 任课教师: 完成时间:
渭南市前进路和东风大街交叉路口交通系统仿真 1.引言 1.1 VISSIM 仿真理论基础 VISSIM 是一种微观、基于时间间隔和驾驶行为的仿真建模工具,用以城市和公路的交通建模。除了可以模拟私人交通外,还可以模拟铁路交通以及公共交通。它可以分析各种交通条件下(车道设置、交通构成、交通信号、公交站点等),城市交通和公共交通的运行状况,是评价交通工程设计和城市规划方案的有效工具。 VISSIM 内部由两部分组成,它们之间通过接口交换检测器数据和信号状态信息。VISSIM 既可以在线生成可视化的交通运行状况,也可以离线输出各种统计数据,如:行程时间、排队长度等。 1.2 仿真的目的与要求 本次仿真作业应用VISSIM 交通仿真软件针对城市内某十字信号交叉口进行了仿真。通过获得的交叉口的渠化、车道、交通量、信号配时等信息,对交叉口的、车辆数量、占有率、行程时间、延误时间和排队插队进行仿真评价。 本次仿真以渭南市前进路和东风大街的交叉路口为研究对象,由于该路段购物商厦比较集中,车流、人流量都较大,加之不少市民为图方便随心所欲横穿马路,有的司机不按交通标识行驶,所以很容易造成交通拥堵。因此选择这个交叉路口,进行交通系统仿真是非常有必要的。
2.仿真系统建立 2.1 基础调查数据 交叉路口航拍图如下图1 所示: 图1 渭南市前进路和东风大街的交叉路口航拍图 从上图可以看出,本交叉口为十字相交叉的信号控制交叉口,。均为双向四车道,可以直行、左转和右转。其中南北方向为混行车道,东西进口车流量较大。其信号周为86s,绿灯40s,黄灯3s,红灯43s。以14 个周期做交通量调查,并计算出小时流量。具体如表1 所示:
三大着名的仿真软件(VISSIM/PARAMICS/TSIS)对比分析 VISSIM仿真系统 VISSIM是德国PTV公司开发的微观仿真软件,是一种微观的、以时间为参照、以交通行为模型为基础的仿真系统,主要用于城市和郊区交通的模拟仿真中。它采用的是一个离散的、随机的、以0.1s为时间步长的微观模型。车辆的纵向运动采用了基于规则的算法。不同驾驶员行为的模拟分为保守型和冒险型。VISSIM提供了图形化的界面,用2D和3D动画向用户直观显示车辆运动,运用动态交通分配进行路径选择。VISSIM可以模拟轨道和道路公共交通、自行车交通和行人交通,由仿真获得的交通特征数据可以评估不同的选择方案。它能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城市交通控制系统,主要应用有:(1)由车辆激发的信号控制的设计、检验、评价;(2)公交优先方案的通行能力分析和检验;(3)收费设施的分析;(4)匝道控制运营分析;(5)路径诱导和可变信息标志的影响分析;(6)路段、交叉口及整个交通网的通行能力和交通流分析;(7)评估不同的设计规划方案和交通组织方案;(8)评估环形交通;(9)评估收费系统和其他交通服务设施;(10)评估智能交通系统的效果(如路径选择系统);(11)大型公交车站的功能分析:(12)复杂交通设施各种运行方式的优化设计(如信号灯控制的路口和无信号灯控制的路口的组合和协调);(13)信号灯控制程序的设计和优化:(14)设计公交优先系统;(15)2D和3D模拟结果的动态演示等。 在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进行模拟。在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL
VISSIM交叉口仿真教程(新手版) 适合:第一次接触者使用 概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表1 选取编辑选项 图表2 如图读取背景图片
图表3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网: 使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link 的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖 第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可
以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线
依此连接所有可行的link,为下一步输入车流打好基础。 第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径: 使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果:
图中的红线和绿线即为点击右键的位置。如此,车辆可以向三个方向运行了。当然,必须之前连好的link之间才可以设置路径。 第六步:给出信号灯配时: 首先选取最上边菜单栏的信号控制中的编辑信号控制机选项,得到下图: 新建新的信号配时方案之后,选取最简单的固定配时进行设置:首先点击编辑信号控制,在新的界面里根据要仿真的实际相位需求添加需要的信号灯组,然后添加新的信号配时方案;接着在信号灯组中选取红绿灯的形式,之后在信号配时方案中进行相位的设置,控制不同灯组出现
基于VISSIM的交叉口感应信号控制仿真研究 陈扶崑,吴中 河海大学交通学院,江苏南京(210098 E-mail:fukunchen163@https://www.doczj.com/doc/f55357861.html, 摘要:首先介绍了感应信号控制原理及其主要参数确定方法,并对微观交通仿真软件VISSIM及车辆感应控制编程(V AP进行了简单说明。以南京市某一典型十字型信号控制交叉口为例,用VISSIM仿真软件作为平台,对该交叉口进行了感应信号控制设计。以通过交叉口的车辆平均延误,平均停车次数,最大排队长度作为评价指标,对该交叉口在不同交通条件下,进行定时控制与感应控制仿真比较分析。最后得出感应控制所适用的交叉口及交通流状况,并且说明了利用VISSIM实现感应信号控制仿真的可行性及优越性。 关键词:感应信号控制,VISSIM,V AP,微观仿真,交通控制 1.前言 目前,某些发达国家(日本、美国等在感应信号控制方面研究与运用较多,国内这方面研究还处于初级阶段,实际运用到道路交叉口中的感应信号控制比较少。感应信号控制运用到实际交叉口上有较大难度,主要原因是技术与资金问题。但我们并不能否认我国许多城市的交叉口适合用感应信号控制。感应信号控制有其自身的优点:感应控制在交通强度较小交叉口,有其优越性,不致使主要道路上的交通产生不必要的延误;感应信号控制在有几个流向的交通量时有时无或多变的复杂交又口上,可得到最大效益;在交通量变化大而不规则、难于用定时控制处置的交叉口以及必须降低对主要干道干扰的交叉口上,用感应控制效益更大。因为感应控制有上述诸多优点,感应信号控制运用到适宜的交叉口上能够提高交叉口的通行能力,减少延误及
停车次数,能够为整个社会的发展带来效益,所以我们值得对它进行深入研究,并逐步运用到适宜的道路交叉口上。 本文介绍了感应信号控制的基本工作原理,分析了感应信号控制的几种主要形式,并以南京市某一典型十字型信号控制交叉口为例,运用微观交通仿真软件VISSIM对该交叉口在不同交通流情况下采用感应信号控制与定时信号控制进行仿真对比分析,其中利用VISSIM 实现感应控制仿真设计是本文的重点与难点。 2.感应信号控制类型及基本原理 根据感应信号控制实施的方式划分,感应控制可以分为以下三种类型:半感应控制、全感应控制和优化感应控制。图1是感应信号工作原理图,它体现了感应控制的基本工作原理。一相位起始绿灯,感应信号控制器内预设有一个“初期绿灯时间”(G min,到初期绿灯结束时,如在一个预设的时间间隔内,无后续车辆到达,即可更换相位;如检测器检测到有后续车辆到达,则每测得一辆车,绿灯延长一个预置的“单位绿灯延长时间”(G0,即只要在这个预置的时间间隔内,车辆中断,即换相;连续有车,则绿灯连续延长。绿灯一直延长到一个预置的“极限延长时间”(G max时,即使检测到后面仍有来车,也中断这个相位的通车权。实际绿灯时间界于初期绿灯时间与绿灯极限延长时间之间[1]。