凸轮机构的弹性动力学分析(附MATLAB 代码)
【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。凸轮系统的运动及动力参数自定。程序代码需提供电子版,并说明运行环境。 【解答】
一、建立动力学模型
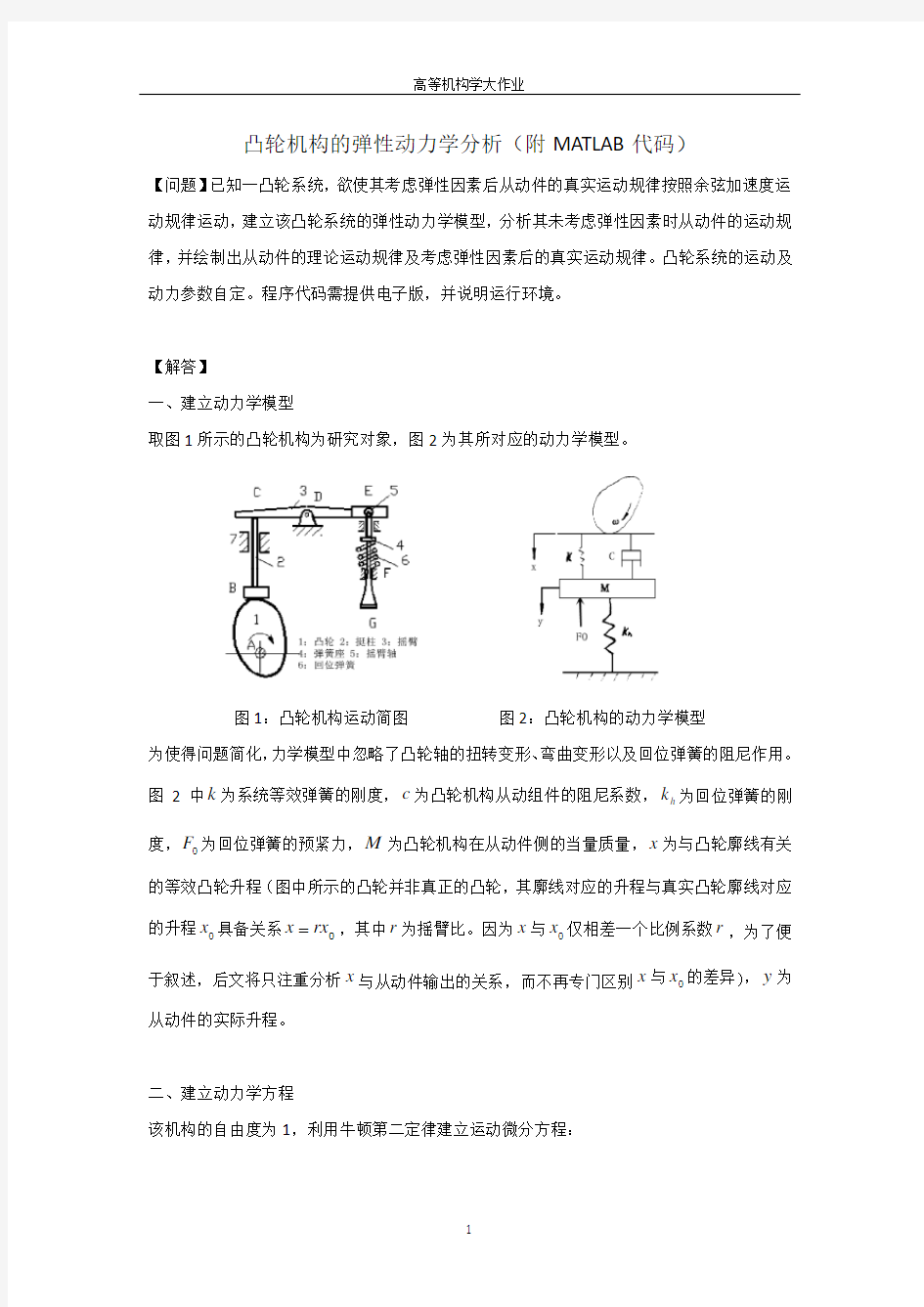
取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。
图1:凸轮机构运动简图 图2:凸轮机构的动力学模型
为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。
二、建立动力学方程
该机构的自由度为1,利用牛顿第二定律建立运动微分方程:
)cos 1(2
?-=h
y 022)()(F y k dt
dx
dt dy c x y k dt y d M h ------= (式1)
设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分?d 具有关系:
ω
?
d dt =
(式2)
将(式2)代入(式1)并整理可得:
02
22
)(F kx d dx c y k k d dy c d y d M h -+=+++?
ω?ω?ω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。
三、运动方程的求解 (一)凸轮轮廓的设计
已知条件如下:kg M 08459
.0=,凸轮的转速min /1200r n =,m s N c /7148.55?=,m N k h /10400=,m N k /3194800=,N F 4000=;为避免余弦加速度运动产生的冲击,取凸轮的推程运动角和回程运动角均为
180,远休止角和近休止角均为
0,从动件的最大升程mm h 2.6=。
根据已知条件,可以确定从动件的位移方程 将上式代入(式3)可得:
kx d dx c F h k k c h k k M h h h +=+++++-?
ω?ω?ω02)(21sin 2cos )]([2 (式4) 由于(式4)对应的常微分方程难以求出解析解,这里利用MATLAB 求解出其数值解并与位移方程比较如下图:
若需要考虑机构的弹性变形,凸轮的轮廓应按照上图中的红色曲线进行设计。
(二)由已知廓线求解从动件的真实运动规律
由于系统的弹性变形,从动件的真实运动y 与等效凸轮升程x 不再相等,当然,从动件的真实运动速度、加速度与对应的理论值也不相等。
由于弹簧的预紧力0F 为常数,它只影响系统振动的初始平衡位置,故在分析从动件的运动规律时不再考虑,从而(式1)被简化为:
kx dt
dx
c y k k dt dy c dt y
d M h +=+++)(22 (式5)
根据振动理论,系统自由振动的固有频率)1(2ξω-+=
M
k k h
n 其中阻尼比
)
(2h k k M c
+=
ξ
代入相关数值计算可得
s rad n /6147=ω,0535
.0=ξ
如果从动件按照前述的余弦加速度规律运动,则 )cos 1(2
?-=h
x 将上式代入(式5)可得:
kx d dx c y k k d dy c d y d M h
+=+++?
ω?ω?ω)(222
(式6)
-3
凸轮的转角/rad
升程/m
利用MATLAB 求解(式6)的数值解,结果如下(图中的ω
ωn
n =
):
从上图中的位移、速度、加速度分析看,当考虑到系统的弹性和阻尼后,工作端的运动规律发生改变,y x ≠。只有当n 很大时,也就是说当系统的固有频率n ω很大时(刚度大),而
-3
凸轮的转角/rad
位移/m
-3
凸轮的转角/rad
速度/(m /s )
-3
凸轮的转角/rad
加速度/(m /s 2)
且凸轮的角速度很小时,y才接近x值。
程序附录:
% filename: tulun.m
% function: cooperate with jisuanlunkuo.m to calculate the curve of the cam
function dx=tulun(a,x)
%% 凸轮机构的结构参数
h=6.2*10^(-3); % 升程
m=0.08459; % 凸轮机构的当量质量
n=1200;w=n/60*2*pi; % 凸轮转速及角速度
c=55.7148; % 阻尼
k1=10400; % 回位弹簧刚度
k=3194800; % 系统等效弹簧刚度
F=400; % 回位弹簧预紧力
%% 理论轮廓的微分方程
dx=(h/2*(m*w^2-k-k1)*cos(a)+h/2*c*w*sin(a)+0.5*(k+k1)*h+F-k*x)/(c*w);
% filename: jisuanlunkuo.m
% function: cooperate with tulun.m to calculate the curve of the cam %% 计算考虑弹性变形的凸轮的理论轮廓曲线
[a,x]=ode45('tulun',[0 2*pi],0);
plot(a,x,'r');
hold on;
%% 作出未考虑弹性变形的凸轮的理论轮廓曲线
a1=linspace(0,2*pi);
h=6.2*10^(-3);
y=h/2*(1-cos(a1));
plot(a1,y,'-b');
%% 添加标注
grid on;
legend('考虑弹性变形后凸轮的理论轮廓','未考虑弹性变形的凸轮理论轮廓');
xlabel('凸轮的转角/rad');
ylabel('升程/m');
% filename: yundongfenxi.m
% function: cooperate with fenxi.m to calculate the displacement,velocity % and acceleration of the cam mechanism when the elastic deformation of % the cam is not considered in design
function dy=yundongfenxi(a,y)
%% 凸轮机构的结构参数
h=6.2*10^(-3);
m=0.08459;
c=55.7148;
k1=10400;
w=1537;
% 不同情况下将凸轮的角速度值分别设为1537,2049,3074
k=3194800;
%% 运动分析微分方程
dy=zeros(2,1);
dy(1)=y(2);
dy(2)=(c*w*h/2*sin(a)+k*h/2*(1-cos(a))-(k+k1)*y(1)-c*w*y(1))/(m*w*w);
% filename: fenxi.m
% function: cooperate with yundongfenxi.m to calculate the displacement,velocity
% and acceleration of the cam mechanism when the elastic deformation of % the cam is not considered in design
%% 绘制从动件的位移曲线
[a,y]=ode45('yundongfenxi',[0 2*pi],[0 0]);
n=length(a);
figure(1);
plot(a,y(:,1),'--b');
% 不同情况下将线型分别设为--b,--g,--k
hold on;
%% 绘制从动件的速度曲线
figure(2);
a1=zeros(n-1,1);
for i=1:(n-1)
a1(i)=a(i);
end
y1=diff(y(:,1))./diff(a);
plot(a1,y1,'--b');
% 不同情况下将线型分别设为--b,--g,--k
hold on;
%% 绘制从动件的加速度曲线
figure(3);
a2=zeros(n-2,1);
for i=2:(n-1)
a2(i-1)=a1(i);
end
y2=diff(y1(:,1))./diff(a1);
plot(a2,y2,'--b');
% 不同情况下将线型分别设为--b,--g,--k
hold on;
% fliename: zuihou.m
% function: give the ideal displacement,velocity and acceleration of the % cam mechanism
%% 绘制理想位移曲线
a0=linspace(0,2*pi);
n=length(a0);
y0=3.1*10^(-3)*(1-cos(a0));
figure(1);
plot(a0,y0,'r');
hold on;
%% 绘制理想速度曲线
figure(2);
a01=zeros(1,n-1);
for i=1:(n-1)
a01(i)=a0(i);
end
y01=diff(y0)./diff(a0);
plot(a01,y01,'r');
hold on;
%% 绘制理想加速度曲线
figure(3);
a02=zeros(1,n-2);
for i=2:(n-1)
a02(i-1)=a01(i);
end
y02=diff(y01)./diff(a01);
plot(a02,y02,'r');
hold on;
%% 添加标注
figure(1);
xlabel('凸轮的转角/rad');
ylabel('位移/m');
legend('n=4','n=3','n=2','标准输出');
figure(2);
xlabel('凸轮的转角/rad');
ylabel('速度/(m/s)');
legend('n=4','n=3','n=2','标准输出');
figure(3);
xlabel('凸轮的转角/rad');
ylabel('加速度/(m/s^2)');
legend('n=4','n=3','n=2','标准输出');
程序运行说明:在MATLAB主窗口中运行jisuanlunkuo.m文件可以得到考虑弹性变形后凸轮的理论轮廓曲线和未考虑弹性变形的凸轮理论轮廓曲线对比图;初次运行fenxi.m可以得到
凸轮角速度
s
rad/
1537
=
ω
情况下从动件的位移、速度和加速度图,之后需要按程序说明
中的位置将yundongfenxi.m文件中的角速度分别改为
s
rad/
2049
和
s
rad/
3074
并相应地
将fenxi.m文件中的线型改为--g和--k,然后再次运行fenxi.m文件可以得到
s
rad/
2049
=
ω
以及
s
rad/
3074
=
ω
情况下从动件的位移、速度和加速度图(每次修改后注意保存),最后
运行zuihou.m文件得到最终的从动件运动量的对比分析图。
第36卷第2期200O年2月 机械工程学 CⅢNESE】oURNAL0FMECHANICAL 报 ENGINEERING Vd.36N02 Feb.2000 摆动从动件共轭凸轮轴心许用区的确定 孙寿文 (黑龙江省商学院机械系哈尔滨150076) 张一同 (燕山大学) 李瑰贤 (哈尔滨工业大学) 摘要对摆动从动件共轭凸轮按许用压力角确定凸轮轴心许用区进行了分析,给出了摆动从动件共轭凸轮等值最小基圆半径的计算方法。 敏词:摆动从动件共轭凸轮轴心许用区 中国分类号:THl32.47 0前言 凸轮基本尺寸的确定是凸轮设计中的一个重要问题。力封闭凸轮和沟槽凸轮轴心许用区的确定,可以用图解法【】01(也可以用计算机代替人工绘图)和解析法-4“]来完成,这些方法都已经比较完善。这两种凸轮求最小基圆半径的问题,也已经得到了解决。然而,共轭凸轮轴心许用区的确定,虽然也略有论述,但很不完善。到目前为止,在国内外文献中还未见到这方面的详尽报道。为使共轭凸轮的设计有一个系统的和便于应用的理论依据,本文对该问题进行详细的分析。 1共轭凸轮轴心许用区边界的组成 1.1异向凸轮轴心许用区的边界 图1为~共轭凸轮机构。凸轮l逆时针转动,在推程与摆动从动件l(长为f。)的转向相反,它们组成了一个异向凸轮机构。凸轮2与凸轮1固结,且与摆动从动件2(长为z:)组成一个同向凸轮机构,同时摆动从动件1与摆动从动件2固结。设计者可以取z,:f2,也可以取Zl≠f2。在没有特殊要求时,通常 圉l共轭凸轮机构 19990512收到初稿,19990627收到修改稿取z】-f2=f,后文中讨论的均为这种情况。 设摆动从动件1的最大摆角为妒。,推程和回程的凸轮转角分别为日.和日2,推程的运动规律为妒】=驴1(日】),回程的运动规律为垆2=驴2(日2)(同时≯2也是从动件2推程的运动规律),许用压力角为[n]。摆动从动件1推程的初始位置为A风,终了位置为AB。,固定坐标系a—zoy与机架固结,原点0与‰重合。由机械原理知,按许用压力角[a]确定凸轮轴心许用区时,摆动从动件在任意位置^曰的一条约束直线为DlE(图2)。直线族D1E的包烙线L一是轴心许用区的一条边界线。设xD.,如.为D1点的坐标,k.=垴,驴j=d驴1/d矾。D1E的直线方程为 y【。如I+(。1一“DI)Ianyl(1)式中yl=9栌+[d]一妒l 根据包络理论:7:知,直线族y1.“#】,口I)的包络线,由下式表示 『yl=,(x1,曰】) 1孥:o(2) 【丽2” 万方数据
1.图示凸轮机构从动件推程运动线图是由哪两种常用的基本运动规律组合而成?并指出有无冲击。如果有冲击,哪些位置上有何种冲击?从动件运动形式为停-升-停。 (1) 由等速运动规律和等加速等减速运动规律组合而成。 (2) 有冲击。 (3) ABCD 处有柔性冲击。 2. 有一对心直动尖顶从动件盘形凸轮机构,为改善从动件尖端的磨损情况,将其尖端改为滚子,仍使用原来的凸轮,这时该凸轮机构中从动件的运动规律有无变化?简述理 由。 (1) 运动规律发生了变化。 (见下图 ) (2)采用尖顶从动件时,图示位置从动件的速度v O P 2111=ω,采用滚子从动件时,图示位置的速度 '='v O P 2111ω,由于O P O P v v 1111 22≠'≠',;故其运动规律发生改变。
3. 在图示的凸轮机构中,画出凸轮从图示位置转过60?时从动件的位置及从动件的位移s。 总分5分。(1)3 分;(2)2 分 (1) 找出转过60?的位置。 (2) 标出位移s。
4. 画出图示凸轮机构从动件升到最高时的位置,标出从动件行程h ,说明推程运动角和回程运动角的大小。 总分5分。(1)2 分;(2)1 分;(3)1 分;(4)1 分 (1) 从动件升到最高点位置如图示。 (2) 行程h 如图示。 (3)Φ=δ0-θ (4)Φ'=δ' 0+θ
5.图示直动尖顶从动件盘形凸轮机构,凸轮等角速转动,凸轮轮廓在推程运动角Φ=? 从动件行程h=30 mm,要求: (1)画出推程时从动件的位移线图s-?; (2)分析推程时有无冲击,发生在何处?是哪种冲击? - 总分10分。(1)6 分;(2)4 分 (1)因推程时凸轮轮廓是渐开线,其从动件速度为常数v=r0?ω,其位移为直线, 如图示。
万方数据
100 机械设计第22卷增刊 一Q.? \V砖癜.\ M ’ \/‘ U ‘ 图3c=6、6=3时位移、速度、加速度曲线 圈4 c=4、6-1时位移、速度、加速度及压力角曲线分析:①由表l可见,若6不变,随着c的增大,~:、 ‰、口m-x主、口。蒯、扁“都随之减小,所以在能够满足~2的 前提下,c应取适当的较大值:若c不变,随着6的增大,厅,: 增大,铂减小,口m“主减小,口m“副增大,氏。增大,所以6 的取值需综合考虑;②由图2可见,6、c的取值对曲线调控 .彬g■l∞t叫!‘’二。脚《’‘'。。。"o,■#,?‘4,■‘一{划#’彭?Z¥二:Xo#二《02静#嘏■r■F※E删群■《j群 (上接第160页)图5生成的锥密封胶管接头螺纹接头 4 结束语 利用VisualBaSic对SolidEdge进行二次开发,扩充了 SoIidEdgc的用法,建立的三维参数化液压元件库应用于液压 性很强,使曲线的变化丰富灵活,具有很大的活动空问和适用范围;③由图3可见,6、c的取值直接影响第一段和最后一段加速度曲线的陡缓程度,从动力特性考虑,6+c的值也不宜选取过人。 表1 b、c的不同取伍对应的各项特性参数 C b k ~I p一 口一副 口。主 4 O.0lI.595 1.27lO.564 27.243 29.2284l1.789 1.0230.57227.903 28.487 422.009O.893 O.580 28.56227.68643 2238 O.814 0.58629.16627.0496 O.0l 1.4“ I.25lO.54526653 28.948 611.5891.059 O.55227.12028.51l 62 1.730 O.944O55927.61028.0076 3l 878 O.867 O.565 28.08l 27.498 2 结论 用上述方法,根据已知的∥o和工艺参数JIz2,设计出的打 纬共轭凸轮运动规律曲线,在能够充分满足打纬工艺要求的前提下,还可以通过对b、c的值进行适当地调解,来满足更多的附加条件和工艺要求,使整个运动规律能够达到期望的效果和更好的运动及机械性能,因此它可以广泛地应用到打纬共轭 凸轮机构的理论设计与反求研究当中。 参考文献 【l】牧野洋.自动机械机构学.胡茂松译.北京:科学出版社.1980【2】陈元甫.剑杆织机原理与使用.北京:中国纺织出版社.1994.【3】华大年.机构分析与设计.北京:纺织工业出版社.1985. ,:≠∞t=辨|旃。■0+‘《懒趟潮4《渊:;崭;群辅“{“自#棒“Ⅳ}艘r耕。t。一一} ’f、一7f■#w、#~’虚拟样机技术中,将提高液压元件三维CAD建模的速度,大提高设计效率,节省人力物力,节约设计成本。 参考文献 【l】彭颖红,等.SolidEdge Visual B孙ic开发入门[MJ.北京:科学出版社, 200I. f2】宋伟,吴建国.中文VisualB船ic6.0高级编程【M】.北京:清华大学出 版社,1999.【3】 李启炎,等.三维CAD设计及制图教程[M】…l二海:同济大学出版社, 2000.The appI.曲“蛐of the3D p|咖n“erizedhydnuIic∞m呻nents datab叠sebase on∞肛dEdgetohyd憎ulicVinualpmtOty辨t托hnique LIANGShu叠ng.yi-YINHui-jun (Gu柚肛iUnjvc晤时oflkhnology?Gu卸gxjLiuzhou545006?China) Abst憎ct:TheanicIe in删uc鹤山e metllodOfbuiIdjng3Dpammeterized hydrauliccomponentSdatab鹅eb笛cdonSolidEdgebyVis岫lB鹊ic.And itis 柚c腩ctcdmet|lod toimproved嚣i驴ingemci∞cyfor applying t11c 0echniq∞ intohydmulic Virtual prototypetechniquo Key words:SOlid Edge: Visual B越ic:par踟eterization; hydmulic components;VinuaIp∞totype F逸5 Tab0Ref3 , ¨ o % o ” o 万方数据
平面连杆机构的运动分析和动力分析1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) ≤其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm 最短杆长度+最长杆长度(125.36+50.1) ≤其余两杆长度之和(109.8+72.85) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第三组(3代)四杆机构L1=163.2mm,L2=61.6mm,L3=150mm,L4=90mm 最短杆长度+最长杆长度(163.2+61.6) ≤其余两杆长度之和(150+90) 最短杆为连架杆,四杆机构为曲柄摇杆机构 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 图1机构结构简图 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别为L1 、L2 、L3 、L4 , 其方位角为、、、。以各杆矢量组成一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即:
项目2 凸轮机构设计 1.教学目标 (1)了解凸轮机构的分类及应用; (2)了解推杆常用运动规律的选择原则; (3)掌握在确定凸轮机构的基本尺寸时应考虑的主要问题; (4)能根据选定的凸轮类型和推杆运动规律设计凸轮的轮廓曲线。 2.教学重点和难点 (1)推杆常用运动规律特点及选择原则; (2)盘形凸轮机构凸轮轮廓曲线的设计; (3)凸轮基圆半径与压力角及自锁的关系。 难点:“反转法原理”与压力角的概念。 3.讲授方法 多媒体课件 4.讲授时数 8学时 任务一凸轮机构的应用 【任务导入】 凸轮机构是由凸轮、从动件、机架以及附属装置组成的一种高副机构。其中凸轮是一个具有曲线轮廓的构件,通常作连续的等速转动、摆动或移动。从动件在凸轮轮廓的控制下,按预定的运动规律作往复移动或摆动。受奥拓汽车零部件制造有限公司委托带领学员分析汽车内燃机凸轮机构的工作过程。 【任务分析】 在各种机器中,为了实现各种复杂的运动要求,广泛地使用着凸轮机构,汽车机构也不例外,如图2.1是汽车内燃机凸轮机构的工作简图。
【力学知识】 平面汇交力系的简化与平衡方程 按照力系中各力的作用线是否在同一平面内,可将力系分为平面力系和空间力系。若 各力作用线都在同一平面内并汇交于一点,则此力系称为平面汇交力系。按照由特殊到一般的认识规律,我们先研究平面汇交力系的简化与平衡规律。 设刚体上作用有一个平面汇交力系F 1、F 2、…、F n ,各力汇交于A 点(图2.2a )。根据力的可传性,可将这些力沿其作用线移到A 点,从而得到一个平面共点力系(图2.2b )。故平面汇交力系可简化为平面共点力系。 连续应用力的平行四边形法则,可将平面共点力系合成为一个力。在图2.3b 中,先合成力F 1与F 2(图中未画出力平行四边形),可得力F R1,即 F R1=F 1+ F 2;再将F R1与F 3合成为力F R2,即F R2=F R1+ F 3;依此类推,最后可得 F R =F 1+ F 2+…+ F n =∑F i (2-1) 式中 F R 即是该力系的合力。故平面汇交力系的合成结果是一个合力,合力的作用线 通过汇交点,其大小和方向由力系中各力的矢量和确定。 若已知F 的大小及其与x 轴所夹的锐角α ,则有 ? ??-==ααsin cos F F F F y x (2-2) 如将F 沿坐标轴方向分解,所得分力F x 、F y 的值与在同轴上的投影F x 、F y 相等。但须 注意,力在轴上的投影是代数量,而分力是矢量,不可混为一谈。 若已知F x 、F y 值,可求出F 的大小和方向,即 ?? ???=+=x y y x F F F F F αtan 22 (2-3) 【设计知识】 一、凸轮机构的分类及应用 根据凸轮及从动件的形状和运动形式的不同,凸轮机构的分类方法有以下四种: (1)按凸轮的形状分类
凸轮机构的弹性动力学分析(附MATLAB 代码) 【问题】已知一凸轮系统,欲使其考虑弹性因素后从动件的真实运动规律按照余弦加速度运动规律运动,建立该凸轮系统的弹性动力学模型,分析其未考虑弹性因素时从动件的运动规律,并绘制出从动件的理论运动规律及考虑弹性因素后的真实运动规律。凸轮系统的运动及动力参数自定。程序代码需提供电子版,并说明运行环境。 【解答】 一、建立动力学模型 取图1所示的凸轮机构为研究对象,图2为其所对应的动力学模型。 图1:凸轮机构运动简图 图2:凸轮机构的动力学模型 为使得问题简化,力学模型中忽略了凸轮轴的扭转变形、弯曲变形以及回位弹簧的阻尼作用。图2中k 为系统等效弹簧的刚度,c 为凸轮机构从动组件的阻尼系数,h k 为回位弹簧的刚度,0F 为回位弹簧的预紧力,M 为凸轮机构在从动件侧的当量质量,x 为与凸轮廓线有关的等效凸轮升程(图中所示的凸轮并非真正的凸轮,其廓线对应的升程与真实凸轮廓线对应的升程0x 具备关系0rx x ,其中r 为摇臂比。因为x 与0x 仅相差一个比例系数r ,为了便于叙述,后文将只注重分析x 与从动件输出的关系,而不再专门区别x 与0x 的差异),y 为从动件的实际升程。 二、建立动力学方程 该机构的自由度为1,利用牛顿第二定律建立运动微分方程:
)cos 1(2 ?-=h y 022)()(F y k dt dx dt dy c x y k dt y d M h ------= (式1) 设凸轮转动的角速度为ω,它与时间微分dt 、凸轮转角微分?d 具有关系: ω ? d dt = (式2) 将(式2)代入(式1)并整理可得: 02 22 )(F kx d dx c y k k d dy c d y d M h -+=+++? ω?ω?ω (式3) 微分方程(式3)有两层含义:①若已知从动件的真实运动规律,可求解出凸轮在高速运转条件下考虑弹性变形影响的理论轮廓;②若已知凸轮廓线,可求解考虑弹性变形的从动件的动力学响应。 三、运动方程的求解 (一)凸轮轮廓的设计 已知条件如下:kg M 08459.0=,凸轮的转速min /1200r n =,m s N c /7148.55?=, m N k h /10400=,m N k /3194800=,N F 4000=;为避免余弦加速度运动产生的冲击, 取凸轮的推程运动角和回程运动角均为 180,远休止角和近休止角均为 0,从动件的最大升程mm h 2.6=。 根据已知条件,可以确定从动件的位移方程 将上式代入(式3)可得: kx d dx c F h k k c h k k M h h h +=+++++-? ω?ω?ω02)(21sin 2cos )]([2 (式4) 由于(式4)对应的常微分方程难以求出解析解,这里利用MATLAB 求解出其数值解并与位移方程比较如下图:
!!共轭凸轮打纬机构分析与优化 滕!兵J!何!勇P!沙!玲J !E O上海工程技术大学"上海B D E G B D#B O东华大学"上海B D E G B D$ 摘!要%文章对共轭凸轮打纬机构进行了简要介绍!建立了某剑杆织机共轭凸轮打纬机构的虚拟样机!分别对主副凸轮及单侧共轭凸轮进行了运动学仿真及研究!并同时针对实际工况中的问题!对该共轭凸轮进行了优化设计"本文的方法对旧织机改造与新型织机开发具有一定的参考意义" 关键词%共轭凸轮#打纬机构#运动学#仿真#优化 中图分类号%.6J R S O J S L!!!文献标识码%‘!!!文章编号%J R R K Z S R P U!P R R_$R J Z R R V R Z R S !!虚拟产品开发技术在发达国家应用日趋广 泛!成熟"特别是在航空!航天!军事!汽车等工业领域成功的事例很多#该技术在国内起步较晚"却已引起各个企业的广泛重视"虽然能系统完整地应用虚拟产品开发技术的企业或研究单位现在还不是很多"但有许多企业开始应用一项或数项单元技术并且取得了明显的效益#I4I!6是目前世界上应用比较广泛的机械系统动力学仿真分析软件#它可以建立和测试虚拟样机"实现在计算机上仿真分析复杂机械系统的运动性能与动态性能等功能# 收稿日期%P R R Q Z J P Z P K 作者简介%滕!兵$J K U J%&"男"山东威海人"助教#E!共轭凸轮打纬机构工作原理 打纬机构是将纬纱推向织口与经纱交织"从而形成织物的机构#图J所示为共轭凸轮打纬机构#当主轴J回转时"主凸轮P推动转子S"带动筘座角V以摇轴L为中心按逆时针方向摆向机前"使筘座Q上的钢筘_进行打纬#此时"转子U 在双臂摆杆作用下紧贴副凸轮K#打纬完毕后"副凸轮变成主动"推动转子U"使筘座脚按顺时针方向向机后摆动"此时转子S又紧贴主凸轮#两凸轮如此相互共轭来完成往复运动"由于共轭凸轮作用"筘座脚回程也是积极传动"这就有利于打纬机构实现高速化 $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$ # 并最终帮助企业赢得更大的服装市场#然而需要注意的是"并不是所有的企业都适合这种开发模式"如对于一些正装品牌而言还是应以设计师为主"一般来说"买手型产品开发模式更适合一些时尚类的休闲服装品牌#因此"企业必须根据自身特点"谨慎地运用这种产品开发模式#参考文献% ’J(!王士如"高彩凤"韩贤军O服装企业买手模式’!(O北京)中国纺织出版社"P R R L O ’P(!陈晓鹏"李克兢O服装业大批量定制生产的配置设计’8(O山东纺织科技"P R R V"$P&)S L%S_O 1’2’3.45-8)5’:.-;/4)X7’<’+-=0’8):3))’.8-L W/K’.?-;’*8!+-)5*8@%8)’.=.*2’ 676,(8*&’,"4#./0,*E,)- $M#’(?&*W’#a"A D#=7"M#’(?&*P Q Q R_J"+)#’&& A O2).34)).)A*,()&’&>7D#’(=)"B*’B"[=*H\,7"A D&’?[A*B"D D*H&[[7>#’([A*?,B=Z?"a">*[Y"’= [&=="A’D*H\,7"AY*?""=)"[&["A=A#"D=*#’D=A,B=B>*=)#’("’="A[A#D"=*&[[>7=)#DY&?"& B B*A?#’(=* =)"#A B*’?#=#*’&’?(#a"DD*Y"#’D=A,B=#*’D*’)*X=*&[[>7=)#DY*?"O E’=)""’?"#=#>>,D=A&="D=)" \,7"A[A*?,B=?"a">*[Y"’=Y*?"#’?"=&#>X#=)"-&Y[>"O P’K9-.;2)\,7"A D*[A*?,B=?"a">*[Y"’=*B>*=)#’("’="A[A#D"*Y&A]"=#’H*A Y&=#*’ 万方数据
第六讲凸轮机构及其设计 (一)凸轮机构的应用和分类 一、凸轮机构 1.组成:凸轮,推杆,机架。 2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。 二、凸轮机构的分类 1.按凸轮的形状分:盘形凸轮圆柱凸轮 2.按推杆的形状分 尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。易遭磨损,只适用于作用力不大和速度较低的场合 滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。不能与凹槽的凸轮轮廓时时处处保持接触。 平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。不能与凹槽的凸轮轮廓时时处处保持接触。 3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。 4.根据凸轮与推杆接触方法不同分: (1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。①等宽凸轮机构②等径凸轮机构③共轭凸轮 (二)推杆的运动规律 一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r0为半径所作的圆称为凸轮的基圆,r0称为基圆半径。推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。休止:推杆处于静止不动的阶段。推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角 二、推杆常用的运动规律 1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。 2.柔性冲击:加速度有突变,因而推杆的惯性力也将有突变,不过这一突变为有限值,因而引起有限
凸轮机构设计及运动分析 问题描述: 如图1所示为以对心直动尖顶盘形凸轮机构。从动杆位移s随时间变化曲线如图2所示。要求设计凸轮机构并分析从动件速度v,加速度a随时间变化的规律,及应力、应变随时间变化的规律。 任务与要求 1.设计满图2运动规律的凸轮机构;(要有设计计算步骤) 2.对所设计的机构运用ansys软件分析从动件速度、加速度随时间变化的规律; 3.查阅资料、了解所给机构的在生产、生活中的应用,说明其工作原理,并附相应的图片或视频。 凸轮机构设计及运动分析指导书
一、设计的目的 通过设计,训练学生机构设计的能力,掌握运用ANSYS Workbench进行瞬态动力学分析的方法、步骤和过程,提高学生解决实际问题的能力。 二、设计报告的主要要求 设计报告包括设计报告书Word文档和Powerpoint演示文稿两部分。 1.设计报告书内容包括目录、任务书、正文、参考文献、组员工作内容表。 (1)文档格式严格遵守设计书文档规范要求。 (2)目录必须层次清楚,并标有页码数。 (3)正文按章节编写,按照任务书要求合理安排内容,并附有参考文献。 2.Powerpoint演示文稿要求内容简洁,重点突出。 三、人员要求:1人 四、时间安排 1.布置任务、准备、查阅资料:2天; 2.机构设计及动画:6天; 3.Ansys分析:6天; 4.编写报告书、Powerpint演示文稿、验收:2天。 5.答辩。 五、成绩形成: 设计报告书:50分;答辩:50分 组内成员按实际完成工作量评定每位学生最终成绩;不参加答辩的学生没有答辩成绩。 六、参考资料:机械原理的平面机构,ansys机械工程应用精华59例
共轭凸轮使用手册 要求及规范: 一个单独的凸轮毛坯有两个路径:一个主路径和一个共轭 一个摆臂的长度是35mm, 和共轭臂的长度相等 共轭臂和主臂间距离135° 一个摆臂的长度是35mm, 和共轭臂的长度相等 凸轮毛坯直径必须至少为220mm,厚度45mm 凸轮毛坯在ANSI方形键槽会有一个50mm的孔,与普通角度即凸轮旋转角度0°是一致的 两个凸轮从动的直径都是19mm 每个路径都有10mm 厚,毛坯将会得到缓解当在凸轮旋转中心顺时针方向旋转时 0°-50°凸轮转动,凸轮臂角度为67.5°时停歇 50°-154°凸轮转动,凸轮臂角度从67.5°到92.5°间修改正弦。 154°-205°凸轮转动,凸轮臂角度从92.5°到42.5°间修改正弦。 205°-255°凸轮转动,凸轮臂角度从42.5°到67.5°间修改正弦。 255°-360°凸轮转动,凸轮臂角度为67.5°时停歇 注意:所有的凸轮臂角度都是常见的角度线,这条线位于凸轮中心和摆臂枢轴之间,在逆时针方向。
一般操作流程 添加并指定一个凸轮毛坯 添加并指定一个主凸轮路径 添加并指定的共轭凸轮路径 在CAD上创建模型
添加一个凸轮毛坯 通过单击添加新圆柱体到装配图标或选择插入>插入新圆柱体到装配菜单项来添加新圆柱体到空CamTrax环境中 通过改变凸轮毛坯名称来改变共轭凸轮名称, 如果需要将单位设为公制 更改毛坯直径为225,要大于成品毛坯的最大直径,为凸轮路径在CAD中拉伸切除提供足够的材料。 更改毛坯高度为45mm 更改孔直径为50mm。 在键槽属性中选择ANSI方形键槽 更改键槽角度为90°。 凸轮毛坯的平面截图
济源职业技术学院 毕业设计 题目凸轮机构的设计 系别机电系 专业机电一体化技术 班级机电0601 姓名赵贝贝 学号06010107 指导教师高清冉 日期2008年12月
设计任务书 设计题目: 凸轮机构的设计 设计要求: 原始条件:内燃机中的凸轮,该凸轮满足以下条件。凸轮以等角速度逆时针回转,及基圆半径rb=30mm,及从动件滚子圆半径rt=8mm。 应完成的任务: 1、凸轮轮廓设计 2、凸轮零件图 设计进度要求: 第一周:确定题目; 第二周:搜集凸轮机构相关资料及前期准备工作; 第三周:凸轮曲线设计及计算; 第四周:初步拟定设计的草稿; 第五周:毕业论文的整体校核、修改; 第六周:论文完善、定稿及打印装订; 第七周:毕业答辩。 指导教师(签名):
摘要 在各种机器中,特别是自动化机器中,为实现某些特殊或复杂的运动规律,常采用凸轮机构。凸轮机构通常是由原动件凸轮、从动件和机件组成。其功能是将凸轮的连续转动或移动转换为从动件的连续或不连续的移动或摆动。与连杆机构相比,凸轮机构便于准确的实现给定的运动规律。所以凸轮机构被广泛地应用,以实现各种复杂的运动要求。 本设计主要设计内燃机中的凸轮机构,内燃机中的凸轮以等角速度回转,其轮廓驱使从动件(阀杆)按预期的运动规律启闭阀门,以控制可燃物进入汽缸或排除废气。至于气阀开启或关闭时间的长短及其速度的变化规律,则取决于凸轮轮廓线的形状。根据从动件运动规律,来设计内燃机中滚子盘形凸轮,使其得到预期的运动规律。 关键词:凸轮机构分类,从动件运动规律,位移曲线,轮廓曲线,结构及材料
目录 设计任务书...................................................................................................................................... I 摘要........................................................................................................................................ II 1凸轮机构的应用及分类.. (1) 1.1凸轮机构的应用 (1) 1.2凸轮机构的分类 (1) 2 从动件常用运动规律 (3) 2.1 凸轮机构的基本参数 (3) 2.2 从动件常用的运动规律 (4) 3盘形凸轮轮廓曲线的设计 (8) 3.1凸轮廓线设计的基本原理 (8) 4凸轮机构的结构及材料 (11) 4.1 凸轮的结构 (11) 4.2从动件结构 (11) 4.3凸轮和滚子的材料 (11) 4.4凸轮的零件图 (13) 结论 (14) 致谢 (15) 参考文献 (16)
凸轮机构基本参数的设计 前节所先容的几何法和解析法设计凸轮轮廓曲线,其基圆半径r0、直动从动件的偏距e或 摆动从动件与凸轮的中心距a、滚子半径rT等基本参数都是预先给定的。本节将从凸轮机 构的传动效率、运动是否失真、结构是否紧凑等方面讨论上述参数的确定方法。 1 凸轮机构的压力角和自锁 图示为偏置尖底直动从动件盘形凸轮机构在推程的一个位置。Q为从动件上作用的载荷(包 括工作阻力、重力、弹簧力和惯性力)。当不考虑摩擦时,凸轮作用于从动件的驱动力F是 沿法线方向传递的。此力可分解为沿从动件运动方向的有用分力F'和使从动件紧压导路的有 害分力F''。驱动力F与有用分力F'之间的夹角a(或接触点法线与从动件上力作用点速度方 向所夹的锐角)称为凸轮机构在图示位置时的压力角。显然,压力角是衡量有用分力F'与有 害分力F''之比的重要参数。压力角a愈大,有害分力F''愈大,由F''引起的导路中的摩擦阻 力也愈大,故凸轮推动从动件所需的驱动力也就愈大。当a增大到某一数值时,因F''而引 起的摩擦阻力将会超过有用分力F',这时无论凸轮给从动件的驱动力多大,都不能推动从动 件,这种现象称为机构出现自锁。机构开始出现自锁的压力角alim称为极限压力角,它的 数值与支承间的跨距l2、悬臂长度l1、接触面间的摩擦系数和润滑条件等有关。实践说明, 当a增大到接近alim时,即使尚未发生自锁,也会导致驱动力急剧增大,轮廓严重磨损、 效率迅速降低。因此,实际设计中规定了压力角的许用值[a]。对摆动从动件,通常取[a]=40~ 50;对直动从动件通常取[a]=30~40。滚子接触、润滑良好和支承有较好刚性时取数据的上 限;否则取下限。 对于力锁合式凸轮机构,其从动件的回程是由弹簧等外力驱动的,而不是由凸轮驱动的,所 以不会出现自锁。因此,力锁合式凸轮机构的回程压力角可以很大,其许用值可取[a]=70~ 80。
凸轮机构研究及发展趋势综述-机械制造论文 凸轮机构研究及发展趋势综述 程亚民唐飞龙王志刚杨洋 (西华大学机械工程学院,四川成都610039) 摘要:主要对凸轮机构的运动规律和轮廓设计作论述。首先对凸轮机构的运动规律和轮廓设计研究进行了介绍,论述其在国内外的发展概况,同时指出凸轮机构在目前应用过程中存在的问题,并提出了相应的解决方案,最后对凸轮机构的发展趋势作了概述。 关键词:凸轮机构;运动规律;轮廓设计 0引言 凸轮机构由凸轮、从动件及机架组成,通过直接接触将预定的运动传给从动件。凸轮机构不仅结构简单、工作可靠,而且能够实现多种复杂的运动规律和轨迹,在各种机械中得到了广泛的运用,如轻工业机械、纺织机械、包装机械、印染机械、内燃机械等。凸轮机构之所以能在各种自动机械中获得广泛应用,还因为它兼有导引及控制机构的各种功能。虽然现在的计算机技术水平很高,但凸轮机构理论和设计方法仍然是许多数学家、工程技术人员和自然科学家研究的热点。凸
轮研究主要包括以下内容:一是凸轮机构的运动规律,二是凸轮机构的轮廓设计。经过多年研究,凸轮机构的运动规律主要有多项式运动、三角函数运动[1],凸轮轮廓设计主要有平面凸轮机构、空间凸轮机构,确定轮廓的方法有瞬心法、包络法、共轭曲面法、等距曲面法[2]、反求法。 1凸轮研究历史概述 在最近的研究中一些学者还提出了其他类型的机构,如球面分度凸轮机构、内啮合式平行分度凸轮机构和弧面球包络分度机构等,在过去的几十年里凸轮研究工作者对凸轮轮廓设计及凸轮运动规律的研究不仅取得了显著的成就,还拓宽了凸轮的研究领域和方向。 (1)对从动件弹性的凸轮机构动力学进行了比较深入的研究,并分析了多种凸轮曲线对机构动力学性能的影响,同时也涉及了有关间隙的运动学、动力学、谐分析、谐综合、振动方面的研究。 (2)经过多年积累,凸轮研究已在振动、噪声、磨损等方面取得了一定的成绩。在20世纪,一些研究人员就将数值仿真方法用于研究凸轮从动件磨损,效果良好。 在过去的100年里,凸轮机构的发展决定着新的制造工艺的发展。早在20世
基于Autodesk Inventor的共轭凸轮设计与运动仿真 笔者结合工作中的实际案例——一位使用Inventor产品多年的印刷机械设备用户,困惑于如何借助3D软件提升设计能力——分析其设计难题,例如比较普遍的凸轮设计问题,其中一个共轭凸轮的机构设计尤为难以实现。本文就是基于解决用户共轭凸轮设计难题的真实案例,介绍了借助Autodesk Inventor设计共轭凸轮的方法及思路。 一、设计要求 用户设计某胶订机,其中一台设备使用到一对共轭凸轮,其中一个凸轮是顶升凸轮,带动机构在垂直方向运动,另一个凸轮带动一个连杆机构,连杆机构的末端带动一个滑块做水平运动,机构简图如图1。T形结构FF’E中,端点E与凸轮1的从动件连结,连杆AB的端点A 连接在滑块上,沿FF’平面做水平往复运动,连杆BCD绕C点转动,D点与凸轮2从动件连结,凸轮1和凸轮2绕同一根轴旋转。 1.凸轮1(垂直运动) 盘式顶升凸轮(沟槽)做垂直方向往复运动。凸轮基圆半径为50mm,凸轮升程为30mm,带动T形结构做垂直方向运动,其在一个周期内的运动规律如表所示。 2.凸轮2(水平运动) 凸轮驱动连杆机构运动,连杆机构的末端连结到一个滑块,滑块的设计要求为一个往复行程为400mm,为配合机构的运动要求,其速度按照如图2所示规律运动。 本文重点在于说明设计的思路,对于机构的具体尺寸以及系统转速等不做说明,上述的设计参数也仅作示意,不代表实际设计数值。 二、设计分析 常见的凸轮形式,包括线性凸轮、盘式凸轮及圆柱凸轮三大类,很多CAD软件没有直接提供凸轮设计工具,需要用户去创建凸轮的轮廓线(通过创建公式曲线,以数据点拟合样条曲线),而轮廓的几何外形仅仅表达了凸轮的位移变化,还无法满足对凸轮性能分析的需求(速度曲线、加速度曲线和压力角变化等)的分析,造成用户设计效率低下,凸轮优化困难。Inventor凸轮设计模块集凸轮设计、计算校验于一身,支持上述三种凸轮,其自带了多达13种拟合函数,最高支持七阶多项式,无需用户推导解析函数,即能生成高质量的凸轮轮廓。凸轮1是一个简单的盘式顶升凸轮,根据表1的设计要求,借助Inventor的凸轮设计工具,我们可以快速设计出其外形轮廓,同时其速度、加速度运动曲线,压力角、曲率半径变化曲线一目了然,而且对运动过程中的力、扭矩及接触应力也自动计算,大大提高了设计的准确
配气机构动力学分析课程设计 目录 一、配气机构的机构简图 ..................................... 错误!未定义书签。 二、配气机构运动学计算分析 (1) 1)配气机构中间参数法的代数分析 (1) 2)运初始值的设定及简化计算 (3) 三、配气机构动力学计算分析 (8) 1)受力分析及微分方程的建立 (8) 2)配气机构质量的换算及方程参数的计算 (10) 3)动力学微分方程的求解 (12) 四、配气机构动力学优化比较 (16) 参考文献: (23) 附件: (24)
配气机构的运动学和动力学分析 一、配气机构的机构简图 其自由度为5432352621F n p p =--=?-?-= 主动件为凸轮轴,输出件为气门。 二、配气机构的运动学计算分析 1、配气机构中间参数法的代数分析 由上面的机构简图可以得到,摇臂轴与凸轮轴的竖直位移为: 000c o s c o s c o s c o s T T T T y l l h l l h H αγαγ++=++= 化简得到: 000(cos cos )(cos cos )T T T l l h h ααγγ-+-=- (1) 摇臂轴与凸轮轴的水平位移: 00sin sin sin sin T T x l l l l H αγαγ+=+= 化简得到: 00(sin sin )(sin sin )0T l l ααγγ-+-= (2) 上面(1)(2)两式对时间求导得到
sin sin cos cos 0 T T T T dh dh l l dt d l l α γα γωαωγω?ωαωγ? +==??? ?--=? 解得cos sin() T T h l αωγ ωαγ'= - c o s s i n ()T h l γωαωαγ'=-- 其中αω,γω分别为摇臂和推杆的角速度,两式对时间求导得到摇臂和推杆的角加速度为: 22 22 (cos sin )sin()cos()()cos [sin()]cos sin []sin() cos sin()sin() [sin()]cos cos cos()[]sin()sin() T T T T T T T T T T T T T T T T h h l l h l h h l h l l l h h l l l γαγαωγωγωαγαγωωωγ εαγωα ωγαγωγαγαγαγωγωα αγαγαγ''''-?----= -''- -''-=---''-+--- 222223cos [sin()]cos cos cos()cos ()sin()sin () T T T T T T h l h h l l ωγ αγωγωγαγλααγαγ'-'''-+=--- 同理,得到推杆的角加速度为 22223 cos cos cos cos()()sin()sin () T T T h h l l γωαωγλααγελαγαγ'''+-=-+-- 其中T l l λ= 即为挺柱和推杆长度比 根据机构简图上的几何关系,00ββαα-=- 0(cos cos )V V l h ββ-=对时间求导可以得到 sin sin V V V dh l l dt βαβωβω=?=? 22 2 (cos sin )V V d h l dt ααβωβε=?+? 将摇臂的角速度,角加速度带入可以得到: cos cos sin sin sin()sin() V V T V T T T dh l h l h dt l l ωγ γββωαγαγ''=?=--
凸轮机构设计分析 院系:机械工程学院 班级: 12机械设计与制造1班 姓名:董辉 指导老师:谢长雄
一、绪论 1、1 凸轮机构概述 低副机构一般只能近似地实现给定运动规律,而且设计较为复杂。当从动 件的位移、速度和加速度必须严格地按照预定规律变化,尤其当原动件作连续 运动而从动件必须作间歇运动时,则以采用凸轮机构最为简便。凸轮机构由凸轮、从动件或从动件系统和机架组成,是一种高副机构,由具有曲线轮廓和凹 槽的构件通过高副接触带动从动件实现预期运动规律。凸轮机构具有结构简单,可以准确实现要求的运动规律等优点。只要适当地设计凸轮的轮廓曲线,就可 以使推杆得到各种预期的运动规律。 在各种机械,特别是自动机械和自动控制装置中,广泛地应用着各种形式 的凸轮机构。凸轮机构之所以能在各种自动机械中获得广泛的应用,是因为它 兼有传动、导引及控制机构的各种功能。当凸轮机构用于传动机构时,可以产 生复杂的运动规律,包括变速范围较大的非等速运动,以及暂时停留或各种步 进运动;凸轮机构也适宜于用作导引机构,使工作部件产生复杂的轨迹或平面 运动;当凸轮机构用作控制机构时,可以控制执行机构的自动工作循环。因此 凸轮机构的设计和制造方法对现代制造业具有重要的意义。 1、2 凸轮机构课题研究背景及意义 早期的工程技术人员大多采用作图法绘制凸轮轮廓,这种方法的效率低、精度差、很难精确地得到压力角和曲率半径等设计参数。在CAD二维设计阶段,CAD的作用仅仅是使工程人员得以摆脱烦琐、精度低的手工绘图,可重复利用已有的设计方案。 而如今的CAD三维设计与CAM集成化,使工程人员可以从三维建模开始, 进行产品构思设计和制图,实现了设计数据直接传输到生产的过程,大大简化 了手工工作环节。由于计算机技术和各种数值计算的发展,使得很多方面的研 究得以深入。利用参数化技术三维CAD可以绘制精确的凸轮。参数化设计具有 造型精确,造型速度快,避免了手工取点造型的复杂过程,完成三维实体模型 可以不断的修改的特点。由于电子技术的发展,现在某些设备的控制元件可以 采用电子元器件,但他们一般只能传递较小的功率,而凸轮机构却能在实现控
凸轮机构及其设计(8学时)(精)
第四章 凸轮机构及其设计(8学时) 一、教学目的和教学要求 1、 教学目的:使学生掌握凸轮机构设计的基础知识,并能根据生产实 际需要的运动规律设计凸轮机构。 2、 教学要求 1)了解凸轮机构的分类和应用 2)了解推杆常用的运动规律及推杆运动规律的选择原则。由于现代机器 的速度提高,几种常用的运动规律已不能满足实际工作需要,因此, 除常用运动规律外,应简单介绍一些改进型的运动规律。 3)掌握在确定凸轮机构的基本尺寸时应考虑的主要问题(包括压力角对 尺寸的影响,压力角对凸轮受力状况、效率和自锁的影响) 4)能根据选定的凸轮类型和推杆的运动规律设计凸轮的轮廓曲线。设计 时应以解析法为主。 二、本章重点教学内容及教学难点 重点1、推杆常用运动规律的特点及其选择原则; 2、凸轮机构运动过程的分析; 3、凸轮轮廓曲线的设计; 4、凸轮机构压力角与机构基本尺寸的关系。 难点 1、凸轮机构设计的基本方法 凸轮设计的基本方法是反转法,所依据的是相对运动原 理。其求解的关键是确定推杆在复合运动中其尖顶的位置。确 定时应注意以下几点: 1)要注意推杆反转方向。先要明确凸轮的实际转向,然 后在图上用箭头及“-ω”标出推杆的反转方向,以 避免搞错反转方向。 2)要正确确定推杆在反转运动中占据的位置。推杆反转 前后两位置线的夹角应等于凸轮的转角δ。 3)要正确确定推杆的位移s 。推杆在复合运动中,对应的 位移量s 应在对应的反转位置上从基圆上开始向外量 取。 2、凸轮机构的运动分析方法 反转法不仅是凸轮机构设计的基本方法,而且是凸轮机构分 析常用的方法。凸轮机构分析常涉及的问题,如给定一凸轮机构, 即已知凸轮机构的尺寸及其位置、凸轮角速度大小及方向,求解 推程角0δ、远休止角01δ、回程角0 δ'、近休止角02δ以及推杆行程h ;或求解当凸轮转过某一个δ角时,推杆所产生的相应位移s 、 速度v 等运动参数及凸轮与从动件在该位置接触时的压力角α 等。这时,如果让凸轮转过δ角后来求解,显然是很不方便的。 即利用反转法求解,这实际上与凸轮设计的反转法原理相同。 三、教学过程思路 (一)、凸轮机构的应用与分类