
番茄自动采摘机器人
引言:随着世界人口的急剧增加,农业生产所承受的压力越来越大,队大规模、高效率的生产模式的需求也日益明显。同时,科技的发展和各种理论、技术的突破也使得这类生产模式成为可能。农业机器人凭借其无疲劳、高效率的优势起到相当重要的作用。自动采摘机器人正是在这种背景下诞生的。20世纪末开始,美国、日本、法国、印度等许多国家开始了对自动采摘机器人的研究,并取得了一定成果,但应用情况并不乐观。
番茄内含有糖、有机酸、矿物质和多种维生素等营养成分,属于营养丰富的“水果蔬菜”,是广泛栽培的重要果菜种类。据20世纪90年代中期统计,世界番茄的总产量为4900万吨/年。随着设施农业的发展和作业机械化的要求,对番茄种植模式的要求也越来越高,尤其是在可控环境的温室中种植面积迅速增长,因此种植、管理和收获的劳动量也越大,研究开发果实收获机器人,实现机械化、自动化与智能化是现代农业工程的重要课题。
一、相关领域国内外研究现状
从1983年第一台番茄采摘机在美国诞生以来,采摘机器人的研究和开发已经历经了近20年。日本和欧美等发达国家相继理想研究用于采摘苹果、番茄、葡萄等水果的智能机器人。到1997年,国外开发的一系列果品蔬菜收摘机器人军言之出了样机。在农业机器人的研究方面,法国是最早研究水果收获机器的国家之一。荷兰收获机器人的研究工作也走在很多国家的前面,但研究的果蔬种类并不多。
在中国,农业机器人研究也逐渐起步。中国农业大学率先在我国研制出自动嫁接机器人,并先后研制成功了自动嫁接法、自动旋切贴合法等嫁接技术。吉林大学与吉林农业研究所研制的除草机器人,装有摄像机和图像处理计算机,能快速准确的分辨出蔬菜苗、杂草和土壤之间的差别,还能在种植行间自动行走。上海交通大学的曹其新等人开发了草莓拣选机器人样机。该样机具有学习功能,作业时可根据示教拣选对象的标准样本,改变或调整机器人拣选草莓的种类,并可一机多用,即使是没有专业知识的操作人员,也能很容易的掌握操作方法。
分析国内外农业机器人的研究进展与应用现状可知,国外已经研制了各种农业机器人,技术比较成熟,部分农业机器人已有初步应用,但我国农业
机器人技术研究处于起步阶段,与日本、美国等发达国家差距较大。开发各类机械,适应农业生产过程智能化发展的趋势,是当代农业工程领域的重要研究课题。
二、关于番茄自动采摘机器人的介绍
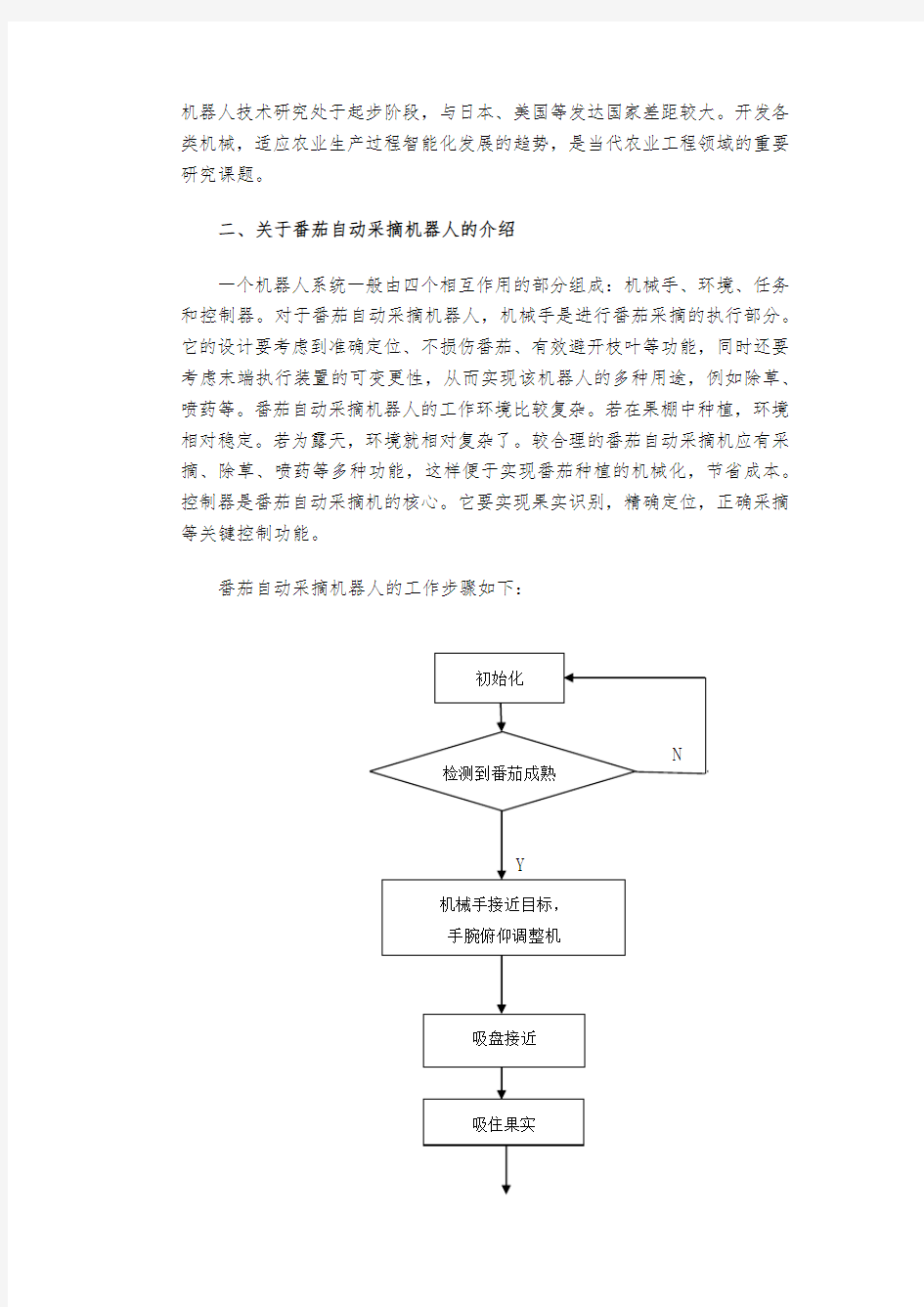
一个机器人系统一般由四个相互作用的部分组成:机械手、环境、任务和控制器。对于番茄自动采摘机器人,机械手是进行番茄采摘的执行部分。它的设计要考虑到准确定位、不损伤番茄、有效避开枝叶等功能,同时还要考虑末端执行装置的可变更性,从而实现该机器人的多种用途,例如除草、喷药等。番茄自动采摘机器人的工作环境比较复杂。若在果棚中种植,环境相对稳定。若为露天,环境就相对复杂了。较合理的番茄自动采摘机应有采摘、除草、喷药等多种功能,这样便于实现番茄种植的机械化,节省成本。控制器是番茄自动采摘机的核心。它要实现果实识别,精确定位,正确采摘等关键控制功能。
番茄自动采摘机器人的工作步骤如下:
三、机械手要实现的功能
⑴调整机械手姿态
当检测到成熟果实,机械手靠近目标,在适当位置通过手腕的俯仰运动来调整机械手臂采摘时的姿态。
⑵夹持功能
由于番茄属于软质果实,夹持器要求保证能稳定抓取的同时不弄坏果实,有的番茄成簇生长,夹持器抓取目标果实的时候要不损伤其茎叶,以免破坏其它果实的成长。
⑶折断功能
夹持稳定后,通过机械手的旋转将目标果实从茎节出折断。
四、机械手的结构设计
机械手机构设计也称机构综合,主要包括型综合与尺寸综合。在机器人研究领域,机械手机构设计是一项很总要的工作,机械手机构形式和结构尺寸决定了机械手的操作特性和末端执行器的姿态。
果实收获机械手设计一方面要考虑机器人本身价格和使用者经验及教育水平,另一方面要考虑工作对象的生物学特性。对于机械手平面构型,几何要求是其重要的设计依据,即必须根据作业要求的没感位姿图选择一种合
适的机型,并且使其具有相当数量的自由度和结构尺寸。收获机器手作为空间开式链机构,设计的关键是根据实际作业对象特性和工作方式来选择机械手结构尺寸,使其满足一定的性能要求,如工作空间、奇异性、逆运动学存在解析解以及作业的负荷要求、精度要求、速度要求、环境要求、同时要考虑抓取运动流行和末端执行装置的形式,以满足姿态要求,降低机械手作业过程中的掉果率、损伤率、分离率,以提高品质特性。
型综合实在确定机械手结构参数之前,根据作业要求确定机械手机构的自由度、组成形式、关节数目和配置方式。型综合有位置和姿态两方面要求。决定目标的具体位置的自由度可以是转动关节,也可以是移动关节,决定姿态的自由度必须是转动关节,通常实现该位姿的关节有多种配置形式,但要满足仿生要求并使结构配置简单。
在机构设计中,机械手机构型综合涉及面广,是总体设计的关键,但目前还不能借助于数学或数值等有效解法来解决。根据可达工作空间设计图标进行两个或三个杆件机械手型综合,利用可达工作空间内工作点建立机构综合程序,进而扩展到其他类型机构的设计。将机械手分为位置结构和姿态结构两部分,分析结构参数和运动参数对位姿的影响,得到设计机械手的封闭方程,并提出几种设计优化后的机构,可直接用于其他机械手设计与选型。根据实践经验,归纳出简明的规范程式,采用逐级筛选法进行机构设计,同时,机构选型还依赖于设计者的经验,直觉以及对仿真结构进行类比。
番茄收获机械手型综合,首先要结合番茄的生物学特性、工作以及其工作特点,分析个类型机构的特性,寻找满足作业要求的多种机械手机构,,然后对所选机构进行性能比较。
机械手通常是由一系列连杆和相应运动副组成的空间开式链,由于作业环境的复杂性、不确定性和果实分布的随机性,收获机械手的选型既要遵循工业机械手的基本原则,又要考虑其工作特殊性,归纳番茄收获机械手的选型原则为:
1.基于植物生物学特性、果实物理特性及仿生学理论等,选择模拟人手臂特性的机械手,使其满足作业要求并具有良好的仿生性能。
2.具有最优的工作空间
3.具有较好的避障功能
4.机构设计合理
5.消除空间的奇异位形采用尽量少的自由度
①手腕机构形式
机械手末端是手腕,其作用是对机械手,末端已定位的物体进行位置补偿的同时,取得一定的姿态。人工采摘蘑菇是,手抓住番茄果实后,在番茄茎梗节处将其扭断。基于这种原理,番茄收获机械手进行采摘作业时,末端执行机构模拟人手动作,首先抓住果实,然后完成果实与花梗分离,此过程需要手腕绕两个轴回转来实现。实现该动作的手腕有两种:
②手臂机构形式
机械手臂主要用来决定末端执行器的位置,对物体的姿态也有一定影响。通常由前三个杆件和关节组成手臂。从机构学的观点来看,由转动副和移动副构成的手臂有很多种。可作为番茄收获机械手的机构有:
手腕手臂组合后有多种形式:
其中类型1,2,3为非冗余机械手,类型4,5,6为冗余度机械手。
对类型4,5,6三种机械手的研究表明,类型四总做空间、可操作度、灵活性、避障等功能指标方面性能优越。所以,选择4机械手结构形式。
对于番茄自动采摘机器人的其他部分本文不做介绍。
参考文献
《机器人技术基础》孟庆鑫、王晓东主编哈尔滨工业大学出版社2006年9月
《机器人学》宋伟刚主编科学出版社2007年10月
《番茄采摘机械手的研究与设计》边源豆丁网2009年4月
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910369070.7 (22)申请日 2019.05.05 (71)申请人 安徽工程大学 地址 241000 安徽省芜湖市鸠江区北京中 路8号 (72)发明人 高洪 孙孟洋 王亚军 贡军 段陈义 王永强 方啸宇 代贡献 叶凯强 (74)专利代理机构 芜湖安汇知识产权代理有限 公司 34107 代理人 朱顺利 (51)Int.Cl. A01D 46/24(2006.01) G06F 17/50(2006.01) (54)发明名称水果采摘机果柄切割装置的设计方法(57)摘要本发明公开了一种水果采摘机果柄切割装置的设计方法,包括步骤:S1、提供固定盘、由多个切割刀片组成的刀片组及相对于固定盘可旋转且用于控制切割刀片进行旋转的旋转盘;处于打开状态的刀片组的中心处形成有让水果通过的第一避让孔;S2、根据固定盘的第二避让孔的直径和旋转盘的定位孔的直径,确定刀片本体的刀口的弦长;S3、根据固定盘的第二避让孔的直径,确定切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离;S4、根据固定盘的第二避让孔的直径和切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离,确定旋转盘的转角。采用该方法设计的水果采摘机果柄切割装置可以使果柄很好的定位被切断,减少采摘时对水果造 成的损伤。权利要求书2页 说明书10页 附图6页CN 110063136 A 2019.07.30 C N 110063136 A
权 利 要 求 书1/2页CN 110063136 A 1.水果采摘机果柄切割装置的设计方法,其特征在于,包括步骤: S1、提供固定盘、由多个切割刀片组成的刀片组及相对于固定盘可旋转且用于控制切割刀片进行旋转的旋转盘;处于打开状态的刀片组的中心处形成有让水果通过的第一避让孔; S2、切割刀片设计成具有刀片本体以及与刀片本体连接的第一销轴和第二销轴,旋转盘设计成具有让第一销轴插入的导向孔,固定盘设计成具有让第二销轴插入的安装孔和让水果通过的第二避让孔; 根据固定盘的第二避让孔的直径D1和旋转盘的定位孔的直径D2,确定刀片本体的刀口的弦长l1, S3、根据固定盘的第二避让孔的直径D1和固定盘的内直径D3,确定切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离l2, S4、根据固定盘的第二避让孔的直径D1和切割刀片的第一销轴的轴心与第二销轴的轴心之间的距离l2,确定旋转盘的转角α, 2.根据权利要求1所述的水果采摘机果柄切割装置的设计方法,其特征在于,90°<θ≤120°。 3.根据权利要求1或2所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述导向孔设计为圆弧形孔,导向孔的长度大于所述第一销轴的直径且导向孔的轴线与第一销轴的轴线相平行。 4.根据权利要求3所述的水果采摘机果柄切割装置的设计方法,其特征在于,对于周向上相邻的两个切割刀片,让其中一个切割刀片的第一销轴插入的导向孔的轴线与另一个切割刀片的第二销轴的轴线共线,导向孔以位于其径向上的第二销轴的圆心为圆心。 5.根据权利要求1至4任一所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述旋转盘上设有拨柄,拨柄用于承受外界施加的使旋转盘旋转的旋转力矩,所述固定盘设计成具有让拨柄穿过的第三避让孔。 6.根据权利要求1至5任一所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述固定盘设计成具有第一盘体和设置于第一盘体上的凸台,凸台设计成插入定位孔中,所述第二避让孔为在凸台上贯穿设置的圆孔,所述切割刀片通过第二销轴与凸台转动连接。 7.根据权利要求6所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述固定盘设计成还具有与所述第一盘体连接的外檐和与第一盘体相对布置的第二盘体,第一盘体和第二盘体均为圆盘状结构且第一盘体和第二盘体为同轴设置。 8.根据权利要求7所述的水果采摘机果柄切割装置的设计方法,其特征在于,所述外檐为圆环形结构且外檐与所述第一盘体和第二盘体的外边缘连接,外檐与第一盘体和第二盘体为同轴设置,所述切割刀片位于第二盘体和所述凸台之间。 9.根据权利要求1至8任一所述的水果采摘机果柄切割装置的设计方法,其特征在于, 2
果蔬采摘机器人的研究 陈磊,陈帝伊,马孝义 (西北农林科技大学水利与建筑工程学院,陕西杨凌712100) 摘要:果蔬采摘机器人是实现农业自动化的一项重要技术。为了掌握果蔬采摘机器人的最新研究动态,将其尽早应用到生产实际,根据近年来国内外最新的研究资料,简要阐述了果蔬采摘机器人的特点和国内外的研究进展,结合当前在此领域的一些研究实例进行比较分析;从采摘机器人的移动机构、机械手、识别和定位系统、末端执行器4部分介绍了其结构组成与设计技术,并在此基础上重点分析了果蔬采摘机器人研究中存在的问题,提出了未来研究开发的技术关键与方向。 关键词:果蔬采摘;机器人;机械手;控制系统 中图分类号:S24;S225.93文献标识码:A文章编号:1003-188X(2011)01-0224-04 0引言 随着电子计算机和自动控制技术的迅速发展、农业高新科技的应用和推广,农业机器人已逐步进入到农业生产领域中,并将促进现代农业向着装备机械化、生产智能化的方向发展。果蔬采摘是农业生产中季节性强、劳动强度大、作业要求高的一个重要环节,研究和开发果蔬采摘的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬品质,以及满足作物生长的实时性要求等方面都有着重要的意义。 1果树采摘机器人的特点 工业领域是机器人技术的传统应用领域,目前已经得到了相当成熟的应用;而采摘机器人工作在高度非结构化的复杂环境下,作业对象是有生命力的新鲜水果或蔬菜。 同工业机器人相比,采摘机器人具有以下的特点[1]:①作业对象娇嫩、形状复杂且个体状况之间的差异性大,需要从机器人结构、传感器、控制系统等方面加以协调和控制;②采摘对象具有随机分布性,大多被树叶、树枝等掩盖,增大了机器人视觉定位难度,使得采摘速度和成功率降低,同时对机械手的 收稿日期:2010-03-31 基金项目:国家自然科学基金项目(50879072);国家级大学生创新实验项目(2009-2011) 作者简介:陈磊(1988-),男,陕西商洛人,在读本科生,(E-mail)chenlei055@nwsuaf.edu.cn。 通讯作者:陈帝伊(1982-),男,河北遵化人,讲师,博士研究生,(E -mail)diyichen@nwsuaf.edu.cn。避障提出了更高的要求;③采摘机器人工作在非结构化的环境下,环境条件随着季节、天气的变化而发生变化,环境信息完全是未知的、开放的,要求机器人在视觉、知识推理和判断等方面有相当高的智能;④采摘对象是有生命的、脆弱的生物体,要求在采摘过程中对果实无任何损伤,从而需要机器人的末端执行器具有柔顺性和灵巧性;⑤高智能导致高成本,农民或农业经营者无法接受,并且采摘机器人的使用具有短时间、季节性、利用率不高的缺点,是限制采摘机器人推广使用的重要因素;⑥果蔬采摘机器人的操作者是农民,不是具有机电知识的工程师,因此要求果蔬采摘机器人必须具有高可靠性和操作简单、界面友好的特点。 2国内外采摘机器人的研究进展 果蔬采摘机器人的研究开始于20世纪60年代的美国(1968年)[2],采用的收获方式主要是机械震摇式和气动震摇式。其缺点是果实易损、效率不高,特别是无法进行选择性的收获,在采摘柔软、新鲜的果蔬方面还存在很大的局限性。但在此后,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,采摘机器人的研究和开发技术得到了快速的发展。目前,日本、荷兰、法国、英国、意大利、美国、以色列、西班牙等国都展开了果蔬收获机器人方面的研究工作,涉及到的研究对象主要有甜橙、苹果、西红柿、樱桃西红柿、芦笋、黄瓜、甜瓜、葡萄、甘蓝、菊花、草莓、蘑菇等,但这些收获机器人目前都还没能真正实现商业化[3]。 我国在农业机器人领域的研究相对开始较晚,但
果实采摘机器人有关论文-刘今朝
果实采摘机器人有关论文 机化141 刘今朝 摘要:果园收获作业机械化、自动化是广大果农关注的热点问题。进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。 关键词:果树采摘机器人现状,发展,常见问题等。 机器人技术是一门新兴的多学科交叉的综合性高新技术,涉及机构学、机械设计学、自动控制、传感技术、计算机、人工智能、仿生学等多个学科领域。机器人作为高自动化、智能化的机电一体化设备,通过计算机编程能够自动完成目标操作或移动作业,具有较高的可靠性、灵活性。因此,机器人技术已成为当今应用广泛、发展迅速和最引人注目的高新技术之一。 随着科学技术的发展和社会的进步,机器人技术已经广泛应用于工业、农业、国防、科技等各个领域。在农业生产中,由于易对植被造成损害、易污染环境等原因,传统的机械通常存在着许多的缺点。为了解决这个问题,国内、外都在进行农业机器人的研究,对农业机器人的需求极其迫切。就我国而言,机械化、自动化程度比较落后。农业机器人的问世,有望改变传统的劳动方式,改善农民的生活劳动状态。因此,世界各国对农业机器人非常重视,投入了大量的资金和人力进行研究开发。农业机器人在农业领域得到很大进展,其功能已经非常完备。农业机器人正在或已经替代人的繁重体力劳动,可以连
续不间断地工作,极大地提高了劳动生产率,是农业智能化不可缺少的重要环节。 采摘机器人是21世纪精确农业的重要装备之一,是未来智能农业机械的发展方向。采摘机器人是针对水果和蔬菜,可以通过编程来完成这些作物的采摘、转运、打包等相关作业任务的具有感知能力的自动化机械收获系统,是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学,需要涉及机械结构、视觉图像处理、机器人运动学动力学、传感器技术、控制技术以及计算信息处理等多方面的学科领域知识。 果实采摘机器人特点: (1) 作业对象的非结构性和不确定性; (2) 作业对象的娇嫩性和复杂性; (3) 良好的通用性和可编程性; (4) 操作对象和价格的特殊性。 果树采摘机器人操作者是农民,不是具有机电知识的工程师,因此要求果树采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。 国外研究进展 ①日本的西红柿采摘机器人 日本的果蔬采摘机器人研究始于1980年,他们利用红色的番茄与背景(绿色)的差别,采用机器视觉对果实进行判别,研制了番茄采摘机器人。该机器人有5个自由度,对果实实行三维定位。由于不是
果蔬采摘机器人研究进展 刘长林,张铁中,杨丽 (中国农业大学,北京100083) 摘要 综述了果蔬采摘机器人的国内外研究现状,介绍了目前大部分典型的果蔬采摘机器人的研究成果。通过分析大部分采摘机器人的工作情况、功能、存在问题,指出了目前采摘机器人的应用与研究过程中的主要难点与制约因素,提出了研究开发的方向与关键技术。关键词 果蔬采摘;机器人;研究进展;关键技术中图分类号 S225 文献标识码 A 文章编号 0517-6611(2008)13-05394-04R esearch P rogress on Picking R obot for F ruits and V egetables LIU Ch ang 2lin et al (Chinese Agricultural University ,Beijing 100083) Abstract T he current situation of research on fruit and vegetable picking rob ot at h om e and broad was summ arized ,the particularly focus were on the re 2search results of m ost ty pical picking rob ots ,including rob ot principle and structure.T hrough analyzing the w orking condition ,function and problems of m ost of picking rob ot ,the present difficulties and restricted factors of picking rob ot in its research and application were point out and the research direction and key techn ology in future were provided.K ey w ords Fruit and vegetable picking ;R ob ot ;Research progress ;K ey techn ology 果蔬采摘作业是果蔬生产中最耗时、最费力的一个环节。果蔬收获期间需投入的劳力约占整个种植过程的50%~70%。随着社会经济的发展和人口的老龄化,很多国家农业劳动力严重短缺,导致果蔬生产劳动力成本增加。为降低成本,提高劳动效率,果实采摘的自动化成为亟待解决的问题。收获作业自动化和机器人的研究开始于20世纪60年代的美国,采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是无法进行选择性的收获[1]。20世纪80年代中期以来,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和 人工智能技术的日益成熟,以日本为代表的发达国家,包括荷兰、美国、法国、英国、以色列、西班牙等国家,在收获采摘机器人的研究上做了大量的工作。 1 国外研究进展 1.1 西红柿采摘机器人 日本近藤(K ONT O )等研制的番茄 采摘机器人,由机械手、末端执行器、视觉传感器、移动机构组成(图1)。该采摘机器人采用了7个自由度机械手。用彩色摄像机作为视觉传感器,寻找和识别成熟果实,并采用双目视觉方法对果实进行定位,利用机械手的腕关节把果实拧下。移动系统采用4轮机构,可在垄间自动行走。该番茄采 图1 日本的番茄采摘机器人 Fig.1 T om ato picking 2robot m ade in Jap an 摘机器人采摘速度大约是15s/个,成功率在70%左右。主要存在的问题是当成熟番茄的位置处于叶茎相对茂密的地方时,机械手无法避开叶茎障碍物完成采摘[2-3]。 在2004年2月10日美国加利福尼亚州图莱里开幕的世界农业博览会上,美国加利福尼亚西红柿机械公司展出2台全自动西红柿采摘机(图2)。如果西红柿单位面积产量有保证的话,那么这种长12.5m 、宽4.3m 的西红柿采摘机每分钟可采摘1t 多西红柿,1h 可采摘70t 西红柿。这种西红柿采摘机首先将西红柿连枝带叶割倒后卷入分选仓,仓内能识别红色的光谱分选设备挑选出红色的西红柿,并将其通过输送 基金项目 国家自然科学基金资助项目(60375036)。作者简介 刘长林(1979-),男,吉林榆树人,博士研究生,研究方向:农 业机器人和生物生产自动化。 收稿日期 2008203228 图2 美国的番茄采摘机器人 Fig.2 T om ato picking 2robot m ade in Am erica 带送入随行卡车的货舱内,然后将未成熟的西红柿连同枝叶 安徽农业科学,Journal of Anhui Agri.S ci.2008,36(13):5394-5397 责任编辑 刘月娟 责任校对 马君叶
水果采摘装置设计 0文献综述 0.1水果采摘实现机械化的必然趋势 在水果的生产作业中,收获采摘是整个生产中最耗时最费力的一个环节。 水果收获期间需投入的劳力约占整个种植过程的50%~70%采摘作业质量的好 坏直接影响到水果的储存、加工和销售,从而最终影响市场价格和经济效益。水果收获具有很强的时效性,属于典型的劳动密集型的工作。但是由于采摘作业环境和操作的复杂性,水果采摘的自动化程度仍然很低,目前国内水果的采摘作业基本上还是手工完成。在很多国家随着人口的老龄化和农业劳动力的减少,劳动力不仅成本高,而且还越来越不容易得到,而人工收获水果所需的成本在水果的整个生产成本中所占的比例竟高达33%~50%高枝水果的采摘还带 有一定的危险性。因此实现水果收获的的机械化变得越来越迫切,发展机械化的收获技术,研究开发水果采摘机器人具有重要的意义。 研究和开发果蔬收获的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬品质,以及满足作物生长的实时性要求等方面都有着重要的意义。采摘机器人是未来智能农业机械化的发展方向,具有广阔的应用前景。2004年11月1日颁布施行的《中华人民共和国农业机械化促进法》还明确规定国家采取措施鼓励,扶持农业机械化的发展,机械采摘取代手工作业是必然的发展趋势。 0.2国外水果机械化采摘装置研究进展及现状 水果的机械化收获技术已有40余年的研究历史。收获作业的自动化和机器人的研究始于20世纪60年代的美国,1968年美国学者Schertz和Brown首次提出应用机器人技术进行果蔬的收获,当时开发的收获机器人样机几乎都需要有人的参与,因此只能算是半自动化的收获机械。采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是无法进行选择性的收获。 从20世纪80年代中期开始,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,以日本为代表的西方发达国家,包括美国、英国、法国、荷兰、以色列、西班牙等国家,都在水果采摘机
水果采摘机械手的设计 发表时间:2019-07-29T10:22:58.127Z 来源:《基层建设》2019年第14期作者:李永峰闫晓桂王光宇裴福玉 [导读] 摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。 哈尔滨远东理工学院黑龙江哈尔滨 150025 摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子轻工和原子能等部门。由于机械臂在各行各业中得到了愈来愈广泛的应用,机械臂控制的多样化、复杂化的需要也随之日趋增多。作为当今科技领域研究的一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有着十分重要的意义。在原有机械手上进行PLC等设计可使机械手实现自动化定位控制丶自动化工作等。通过重新编程序可使其变成多功能机器。 关键词:采摘;机械手;水果 1、机械手的发展趋势 机械手是集机械、电子、控制、计算机、信息等多学科交叉综合,它的发展和进步依赖并促进相关技术的发展和进步。因此,机械手的主要发展方向如下: 机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。 机械手控制系统向基于pc机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。 机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。 虚拟现实技术在机械手中的作用从仿真、预演向用于过程控制发展,如使遥控机械手操作者产生置身于远端作业环境中的感觉来操纵机械手 2、设计水果采摘机械手的作用 据统计,2017年全国水果总产量(不含瓜果类,下同)达到1.82亿吨,比1978年增长26.7倍,年均增速8.9%。自1994年以来,我国水果总产量稳居世界第一。但目前存在果园人力不足、采摘效率低、有时因为采摘不及时水果坏掉、果子结在高处人工面临着高空采摘的危险等问题,而一切采摘过程目前都由人工采摘,在我国机械化的采摘目前处于空白期,即使有机械化机器的投入和使用也是个别体,且机器的投入成本往往很大,果农无法承担此高昂的成本使用该器械。 果实的采摘是一个季节性较强和劳动密集型的工作,采摘作业所用劳动力占整个生产过程所用劳动力的33% ~50%,采摘作业比较复杂,季节性很强,若使用人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤。使用采摘机械不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益。 目前而言我国是世界水果生产大国,但在果园管理程度不高(尤其是机械化采摘果品)由于人口老龄化和农村劳动力越来越少,在单调、繁重、危险的果实采摘作业上急需高效、通用、低成本的采摘技术,而智能化技术的出现和应用让人们的生活变得更加方便快捷,与传统机械臂相比,拥有智能化,仿生化等技术的机械臂操作起来更加简单方便快捷,运用起来也更加灵活多变,智能制造技术是未来先进制造技术发展的必然趋势,是抢占产业发展的制高点必胜法则。 3、水果采摘机械手的整体方案设计 为了使机械手的通用性更强,把机械手的手部结构设计成可更换结构,当工件是棒料时,使用夹持式手部。考虑到机械手的通用性,同时由于被抓取物件位置的不确定性,因此手腕必须设有回转运动才可满足工作的要求。因此,手腕设计成回转结构,实现手腕回转运动。按照抓取工件的要求,本机械手的手臂有三个自由度。 由于系统的动作迅速,反应灵敏,阻力损失和泄漏较小,成本低廉因此本机械手采用机械传动方式。考虑到机械手的通用性,同时使用点位控制,因此我们采用可编程序控制器(PLC)对机械手进行控制。当机械手的动作流程改变时,只需改变PLC程序即可实现,非常方便快捷。 4、水果采摘机械手的设计内容 语音驱动技术:利用语音识别系统,声电转化系统,电路系统等,对采集的目标语音进行处理,将发出的声音指令进行信息化处理,最后由指令声响效果激发拾音器进行声电转换来控制用电器的开关,并经过延时后能自动断开电源,从而达到声控制动的效果。 传感技术:在机器上安装相应的传感器,使其达到预想的结果。红外传感:检测物体信息执行动作;声音传感:检测声音执行动作;倾角传感器:用倾斜角度的大小来实现对机器的旋转。 开发无人操控,将机器开发为可人为控制和自行运行模式,运用单片机编程技术,和红外传感技术,对机器进行软件编程,在无人操作下,开启自动运行,实现对果物的自行摘取。 体感技术:运用体感技术,以达到人机合一的效果。 机器驱动设计:由于工作环境不用,对机器行驶要求不同,而在果园大都为凹凸不平的土质地面,所以在驱动方面采用履带式设计,其好处在于其可以减少路况对机器行驶的限制,可以在恶劣路况下完成工作。 电源设备的改进及应用:由于产品最终投入果园进行长运作,而又要确保对环境的保护,在确保不影响环境的情况下动力的选用尤为重要,供电设备的选用也将是研究的重之重。 设备的安全性:通过对设备机体结构的设计,确保其在运行过程中能够安全稳定的工作,并要对线路的安排布置也要做出相应的措施。并要对设备加装一些应急错失和短路保护装置。 5、结束语 本次设计的机械手,相对于专用机械手,通用机械手的自由度可变,控制程序可调,因此适用面更广。动作迅速,反应灵敏,能实现过载保护,便于自动控制。工作环境适应性好,不会因环境变化影响传动及控制性能。阻力损失和泄漏较小,不会污染环境。同时成本低
水果采摘机械手的设计 摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物 件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自 动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、 电子轻工和原子能等部门。由于机械臂在各行各业中得到了愈来愈广泛的应用, 机械臂控制的多样化、复杂化的需要也随之日趋增多。作为当今科技领域研究的 一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有 着十分重要的意义。在原有机械手上进行PLC等设计可使机械手实现自动化定位 控制丶自动化工作等。通过重新编程序可使其变成多功能机器。 关键词:采摘;机械手;水果 1、机械手的发展趋势 机械手是集机械、电子、控制、计算机、信息等多学科交叉综合,它的发展 和进步依赖并促进相关技术的发展和进步。因此,机械手的主要发展方向如下:机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、 检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外 已有模块化装配机器人产品问市。 机械手控制系统向基于pc机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。 机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感 器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。 虚拟现实技术在机械手中的作用从仿真、预演向用于过程控制发展,如使遥 控机械手操作者产生置身于远端作业环境中的感觉来操纵机械手 2、设计水果采摘机械手的作用 据统计,2017年全国水果总产量(不含瓜果类,下同)达到1.82亿吨,比1978年增长26.7倍,年均增速8.9%。自1994年以来,我国水果总产量稳居世界第一。但目前存在果园人力不足、采摘效率低、有时因为采摘不及时水果坏掉、 果子结在高处人工面临着高空采摘的危险等问题,而一切采摘过程目前都由人工 采摘,在我国机械化的采摘目前处于空白期,即使有机械化机器的投入和使用也 是个别体,且机器的投入成本往往很大,果农无法承担此高昂的成本使用该器械。 果实的采摘是一个季节性较强和劳动密集型的工作,采摘作业所用劳动力占 整个生产过程所用劳动力的33% ~50%,采摘作业比较复杂,季节性很强,若使 用人工采摘,不仅效率低、劳动量大,而且容易造成果实的损伤。使用采摘机械 不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农的经济效益。 目前而言我国是世界水果生产大国,但在果园管理程度不高(尤其是机械化 采摘果品)由于人口老龄化和农村劳动力越来越少,在单调、繁重、危险的果实 采摘作业上急需高效、通用、低成本的采摘技术,而智能化技术的出现和应用让 人们的生活变得更加方便快捷,与传统机械臂相比,拥有智能化,仿生化等技术 的机械臂操作起来更加简单方便快捷,运用起来也更加灵活多变,智能制造技术 是未来先进制造技术发展的必然趋势,是抢占产业发展的制高点必胜法则。 3、水果采摘机械手的整体方案设计
果树采摘机器人发展概况及特点 机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现f3l。机器人集成了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科的发展成果,代表高技术的发展前沿,是当前科技研究的热点方向14J。21世纪是农业机械化向智能化方向发展的重要历史时期。我国是一个农业大国,要实现农业现代化,农业装备的机械化、智能化是发展的必然趋势。随着计算机和自动控制技术的迅速发展,机器人已逐步进入农、lp生产领域。目前,国内浆果采摘作业基本上都是靠人工完成的,采摘效率低,费用占成本的比例约为50%.70%。采摘机器人作为农业机器人的重要类型,其作用在于能够降低工人劳动强度和尘产费用、提高劳动生产率和产品质量、保证果实适时采收,冈而具有很大的发展潜力lM。1.2.1国外研究成果及现状自从20世纪60年代(1968年)美国人Schertz 和Brown提出,}J机器人采摘果实之后,对采摘机器人的研究便受到广泛重视。随蓿科学技术的发展,农业机器人在国外迅速发展起来。最早的机械采摘方法是机械振摇式和7 e动振摇式两种方法,但这两种方法不仅容易损伤果实,采摘效率也不高,同时容易摘到未成熟果实I61。1983年,第一台采摘机器人在美固诞生,在以后20多年的时M晕,同、韩及欧美国家相继研究了采摘番茄、黄瓜、苹果、蘑菇、柑橘、番茄和甜瓜等的智能机器人。l、日本的番茄采摘机器人:日本的果蔬采摘机器人研究始于1 984年,他们利用红色的番茄与背景(绿色)的差别,采用机器视觉对果实进行判别,研制了番茄采摘机器人。该机器人有5个自由度,对果实实行三维定位。由于不是全自由度的机械手,操作空间受到了限制,而且孥硬的机械手爪容易损伤果实。日本冈山大学的Kondo等人研制的番茄采摘机器人,山机械手、末端执行器、行走装置、视觉系统和控制部分组成,如图1-1所示。·—●T—争Sl7777一图1.1番茄采摘机器人结构简图S1一前后延伸棱柱关节;S2一上下延伸棱柱关节:3、4、5、6、7一旋转关节该机器人采用由彩色摄像头和图像处理卡组成的视觉系统来寻找和识别成熟果实。考虑到番茄的果实经常被叶茎遮挡,为了能灵活避开障碍物,采用具有冗余度的7自由度机械手。为了不损伤果实,其末端执行器配带2个带有橡胶的手指和1个气动吸嘴,把果实吸住抓紧后,利用机械手的腕关节把果实拧下。行走机构有4个车轮,能在!tl问自动行走,利用机器人上的光传感器和设置在地头土埂的反射板,可检测是否到达土埂,到达后自动停止,转向后再继续前进。该番茄采摘机器人从识别到采摘完成的速度大约是15s/个,成功率在70%左右。有些成熟番茄未被采摘的主要原因是其位置处于叶茎相对茂密的地方,机器手无法避开叶茎障碍物。因此需要在机器手的结构、采摘工作方式和避障规划方面加以改进,以提高采摘速度和采摘成功率,降低机器人自动化收获的成本,才可能达到实用化17,81。2、荷兰的黄瓜采摘机器人:1996年,荷兰农业环境工程研究所(1MAG)研制出一种多功能黄瓜收获机器人。该机器人利用近红外视觉系统辨识黄瓜果实,并探测它的位置;末端执行器由手爪和切割器构成,用来完成采摘作业。机械手安装在行走车上,机械手的操作和采摘系统初步定位通过移动行走车来实现,机械手只收获成熟黄瓜,不损伤其他未成熟的黄瓜。该机械手有7个自山度,采用三菱公司(Mitsubishi)RV.E2的6自由度机械手,另外在底座增加了一个线性滑动自由度。收获后黄瓜的运输由一个装有可卸集装箱的自动行走的运输车来完成。整个系统无人工干预就能在温室工作,工作速度为54s/根,采摘率为80%。试验结果表明:该机器人在实验室中的采摘效果良好,但由于制造成本和适应性的制约,还不能满足商用的要求l引。3、韩国的苹果收获机器人:韩国庆北大学的科研人员研制出节果采摘机器人,它具有4个自由度,包括3个旋转关节和1个移动关节。采用三指夹持器作为末端执行器,其手心装有压力传感器,可以起到避免苹果损伤的作用。它利用CCD摄像机和光电传感器识别果实,从树冠外部识别苹果的识别率达85%,速度达5个/s。该机器人末端执行器下方安装有果实收集袋,缩短了从采摘到放置的时问,提高了采摘速度。该机器人无法绕过障碍物摘取苹果;对于叶茎完全遮盖的苹果,也没有给出识别和采摘的解决方法【lol。4、英国的蘑菇采摘机器人:英国Silsoe研究院研制了蘑菇采摘机器人,它可以自动测量蘑菇的位置、大小,并选择性地采摘和修剪。它的机械手包括2个气动移动关节和1个步进电机驱动的旋转关节;末端执行器是带有软衬挚的吸引器;视觉传感器采用TV摄像头,安装在顶部用来确定蘑菇的位置和大小。采摘成功率在7s%左右,采摘速度为6.7s/个,生长倾斜是采摘失败的主要原因。如何根据图像信息调整机器手姿态动作来提高成功率和采用多个未端执行器提高生产率是亟待解决的问趔¨1。5、西班牙的柑橘采摘机器人:西班爿:科技人员发明的这种柑橘采摘机器人主体装在拖拉机上,由摘果手、彩色视觉系统和超声传感定位器3部分组成。它能依据柑桔的颜色、大小、形状束判断柑桔是否成熟?决定是否采摘。采下的桔子还可按色泽、大小分级装箱。这种采桔机器人采摘速度为1个/s,比人工提高效率6倍多‘121。6、以色列和美国联合研制的甜瓜收获机器人:以色列和美国科技人员联合开发研制了一台甜瓜采摘机器人。该机器人丰体架设在以拖拉机牵引为动力的移动平台上,采用黑白图像处理的方法进行甜瓜的识别和定位,并根据甜瓜的特殊性来增加识别的成功率。在两个季节和两个品种的}H问试验证明,甜瓜采摘机器人可以完成85%以上的}H问甜瓜的识别和采摘.1=作‘"1。表1.1给出了国外部分国家果蔬收获机器人同期研究进展统计。1.2.2国内研究成果及现状国内在农业机器人方面的研究始于20世纪90年代中期,与发达国家相比,虽然起步较晚,但不少大专院校、研究所都在迸行采摘机器人和智能农业机械方面的研究,已有很多研究成果披露,简介如下:l、林木球果采摘机器人:东北林业大学的陆怀民研制了林木球果采摘机器人,主要由5自由度机械手、行走机构、液压驱动系统和单片机控制系统组成,如图1.2所示。采摘时,机器人停在距离母树3.5m处,操纵机械手回转马达对准母树。然后,单片机控制系统控制机械手大、小臂同时柔性升起达到~定高度,采摘爪张开并摆动,对准要采集的树枝,大小臂同时运动,使采摘爪沿着树枝生长方向趋近I 5-2m,然后采摘爪的梳齿夹拢果技,大小臂带动采集爪按原路向后返回,梳下枝上的球果-完成一次采摘。这种机器人效率是500k∥天,是人工的30一50倍。而且,采摘时对母树的破坏较小,采净率矧川。2、蘑菇采摘机器人:吉林工qk大学的周云山等人研究了蘑菇_={壬摘机器人。该系统主要由蘑菇传送带、摄像机、采摘机器手、二自由度气动伺服机构、机器手抓取控制系统和计算机等组成。汁算机视觉系统为蘑菇采摘机器提供分类所需的尺寸、面积信息,并且引导机器手准确抵达待采摘蘑菇的中心位置,防止因对不准造成抓取失败或损伤蘑菇il”。3、草莓采摘机器人:中国农业大学的张铁中等人针对我国常见的温室罩垄作栽培的草莓设计了3 种采摘机器人。分别采用桥架式、4自由度』毛门式和3自由度直角坐标形式的机械手进行跨行收获,通过彩色CCD传感系统获取彩色图像,经过图像处理进行目标草莓的识别和定位,进而控制末端执行器进行收获。同时,对草莓的生物特性、成熟度、多个草莓遮挡等实际问题进行了研究,为草莓采摘提供设计依据和理论基础{161。4、番茄采摘机器人:南京农业大学的张瑞合、姬长英等人在番茄采摘中运用双目立体视觉技术对红色番茄进行定位,将图像进行灰度变换,而后对图像的二维直方图进彳亍腐蚀、膨胀以去除小团块,提取背景区边缘,然后用拟合曲线实现彩色图像的分割,将番茄从背景中分离出来。对目标进行标定后,用面积匹配实现共轭图像中目标的配准。运用体视成像原理,从两幅二维图像中恢复目标的三维坐标。通过分析实验数据得出的结论为.当目标与摄像机的距离为300mm-400mm 时,深度误差可控制在3%4%t”I。5、黄瓜采摘机器人:中国农业大学汤修映等人研制了6自由度黄瓜采摘机器人,采用基于RGB三基色模型的G分量来进行图像分割,在特征提取后确定出黄瓜果实的采摘点,未端执行器的活动刃口平移接近固定刃口,通过简单的开合动作剪切掉黄瓜。同时,提出了新的适合机器人自动化采摘的斜栅网架式黄瓜栽培模式。6、节果采摘机器人:中国农业大学的孙明等人为苹果采摘机器人开发了一套果实识别机器视觉系统,并成功研究了一种使二值图像的像素分割J下确率大于80%的彩色图像处王甲技术。通过对果实、叶、茎等的色泽信号浓度频率谱图的分析,求}l{闽值,然后运用此值对彩色图像进行二值化处理l。引。1.2.3果树采摘机器人的特点1、采摘对象的非结构性和不确定性果实的生长是随着时fHJ和空问而变化的。生长的环境是变化的,直接受土地、季节和天气等自然条件的影响。这就要求果树采摘机器人不但要具有与生物体柔性相对应的处理功能,而且还要能够顺应多变的自然环境,在视觉、知识推理和判断等方面具有很高的智能性。2、采摘对象的娇嫩性和复杂性果实具有软弱易伤的特性,必须细心轻柔地对待和处理;并且其形状复杂,生长发育程度不一,导致相互差异很大。果蔬采摘机器人一般是采摘、移动协调进行,行走轨迹不是连接出发点和终点的最短距离,而是具有狭窄的范围、较长的距离以及遍及整个果园表面等特点。3、具备良好的通用性和可编程性因为果树采摘机器人的操作对象具有多样性和可变性,这就要求采摘机器人具有良好的通用性和可编程性。只要改变部分软、硬件,就能进行多种作业。4、操作对象的特殊性和价格的实惠性农民是果树采摘机器人的主要操作者,他们不具有相关的机电理论知识,因此要求果树采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。
《农业生产机械化》课程论文论文题目:果蔬采摘机器人国内外研究现状 学院: 专业: 班级: 学号: 学生姓名: 指导教师: 年月日
果蔬采摘机器人国内外研究现状 摘要 本文描述了什么是果蔬机器人,果蔬采摘机器人的作用以及国内外果蔬采摘机器人的研究现状并对其作以评价。 关键词:果蔬采摘机器人国内外研究现状 Fruit and vegetable picking robot research status at home and abroad Abstract In this paper, What fruit and vegetable is robot are described in this paper, the effect of harvesting robot, and the research status of fruit and vegetable picki ng robot at home and abroad and its evaluati on. Keywords: fruit and vegetable pick ing robot research status at home and abroad 农业是国民经济的基础,这是不以人们意志为转移的客观经济规律。农业生产力发展的水平和农业劳动生产率的高低,决定了农业为其他部门提供剩余产品和劳动力的数量,进而制约着这些部门的发展规模和速度。只有农业发展了 , 国民经济其他部门才能得以进一步的发展。⑴农业机械化是农业现代化的中心环节,它凝聚着现代科学技术的最新成果,并配合农业生物等农业技术,成为发挥增产作用的基本手段和提高劳动生产率、减轻繁重体力劳动的必要条件和根本途径,从而带来生产力
果实采摘机器人有关论文 机化141 刘今朝 摘要:果园收获作业机械化、自动化是广大果农关注的热点问题。进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。 关键词:果树采摘机器人现状,发展,常见问题等。 机器人技术是一门新兴的多学科交叉的综合性高新技术,涉及机构学、机械设计学、自动控制、传感技术、计算机、人工智能、仿生学等多个学科领域。机器人作为高自动化、智能化的机电一体化设备,通过计算机编程能够自动完成目标操作或移动作业,具有较高的可靠性、灵活性。因此,机器人技术已成为当今应用广泛、发展迅速和最引人注目的高新技术之一。 随着科学技术的发展和社会的进步,机器人技术已经广泛应用于工业、农业、国防、科技等各个领域。在农业生产中,由于易对植被造成损害、易污染环境等原因,传统的机械通常存在着许多的缺点。为了解决这个问题,国内、外都在进行农业机器人的研究,对农业机器人的需求极其迫切。就我国而言,机械化、自动化程度比较落后。农业机器人的问世,有望改变传统的劳动方式,改善农民的生活劳动状态。因此,世界各国对农业机器人非常重视,投入了大量的资金和人力进行研究开发。农业机器人在农业领域得到很大进展,其功能已经非常完备。农业机器人正在或已经替代人的繁重体力劳动,可以连
续不间断地工作,极大地提高了劳动生产率,是农业智能化不可缺少的重要环节。 采摘机器人是21世纪精确农业的重要装备之一,是未来智能农业机械的发展方向。采摘机器人是针对水果和蔬菜,可以通过编程来完成这些作物的采摘、转运、打包等相关作业任务的具有感知能力的自动化机械收获系统,是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学,需要涉及机械结构、视觉图像处理、机器人运动学动力学、传感器技术、控制技术以及计算信息处理等多方面的学科领域知识。 果实采摘机器人特点: (1) 作业对象的非结构性和不确定性; (2) 作业对象的娇嫩性和复杂性; (3) 良好的通用性和可编程性; (4) 操作对象和价格的特殊性。 果树采摘机器人操作者是农民,不是具有机电知识的工程师,因此要求果树采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。 国外研究进展 ①日本的西红柿采摘机器人 日本的果蔬采摘机器人研究始于1980年,他们利用红色的番茄与背景(绿色)的差别,采用机器视觉对果实进行判别,研制了番茄采摘机器人。该机器人有5个自由度,对果实实行三维定位。由于不是
2006年10月 农业机械学报 第37卷第10期 西红柿采摘机器人视觉系统的目标提取 * 赵金英 张铁中 杨 丽 【摘要】 提出了基于色彩分通道法的果实目标提取方法。该方法是先将彩色图像在色彩空间中分解成多个单通道图像,再对每个通道图像进行分割,最后综合各通道结果得到彩色图像的整体分割结果。采用该方法对西红柿图像在Lab 色彩空间下进行试验,结果表明此方法简单快速,得到的果实目标较清晰准确,可满足图像后续处理的需要。 关键词:视觉系统 图像分割 色彩分通道法 Lab 色彩空间中图分类号:S641.2;T P391.41 文献标识码:A 收稿日期:2005 0616 *国家“863”高技术研究发展计划资助项目(项目编号:2001AA422300)赵金英 中国农业大学工学院 博士生,100083 北京市张铁中 中国农业大学工学院 教授 博士生导师杨 丽 中国农业大学工学院 讲师 博士生 引言 西红柿采摘机器人视觉系统中目标提取的实质是图像分割。多年来图像分割一直受到研究人员的 高度重视,至今已提出了上千种类型的分割算法[1] 。但是关于彩色图像分割的文献还较少,目前研究主要是讨论了一些彩色表示法的性质,分割方法和色彩空间;运用基于边缘和基于区域的分割技巧进行彩色图像的复杂纹理分割。对于彩色图像分割,没有一种算法和色彩空间适应于所有彩色图像,所有现存的彩色图像分割方法都是针对特定图像特定应用场合的[2]。 针对直接对采集到的RGB 模式的彩色图像进行分割较难,而对单通道图像分割可以缩短图像处理时间、提高效率这一特点,提出了基于色彩分通道的果实目标提取方法。 1 色彩分通道法原理 色彩分通道法的原理如下:将彩色图像在色彩空 间中按色彩空间分量分解成多个单通道图像。其中色彩空间可选RGB 、HSI 、Lab 或其他色彩空间。分解得到的单通道图像信息可用灰度图像来描述,此灰度图像可使用现有成熟的单色图像处理方法得到单通道图像分割结果。在得到各个单通道结果以后,综合各通道结果而得到彩色图像的整体分割结果。 2 色彩空间的选择 每一种色彩空间都有其各自的产生背景、应用 领域。要分割一幅彩色图像,色彩空间的选取对分割结果起着决定性作用。彩色图像处理中常用的色彩空间有:RGB 色彩空间、HSI 色彩空间、Lab 色彩空间等。RGB 色彩空间是根据3基色原理建立起来的,是最基本的色彩空间,其他色彩空间模型都可通过RGB 转化得到。HSI 色彩空间直接采用彩色特性意义上的3个量:亮度或明度(I )、色调(H )、饱和度(S )来描述颜色,比较符合人眼对颜色的描述习惯,但表示的颜色并不全是视觉所感受的颜色。Lab 色彩空间是根据色度和亮度组成的3维空间图,它适用于一切光源色或物体色的表示与计算。其中L 表示心理明度,a 、b 为心理色度,反映到坐标系统中,+a 表示红色,-a 表示绿色,+b 表示黄色,-b 表示蓝色,颜色的明度由L 的百分数来表示,其取值从0~100。 观察从自然环境下拍摄的西红柿图像[3]:成熟西红柿的颜色为红色,未成熟西红柿及其背景颜色为绿色。从以上对色彩空间的介绍可知,Lab 色彩空间中a 通道两端所代表的颜色正好是成熟西红柿果实颜色与背景颜色,因此本文选用Lab 色彩空间作为彩色图像的分割空间。RGB 与Lab 间的转化关系为 L =116(0.229R +0.587G +0.114B )1/3-16a =500[1.006(0.607R +0.174G +0.201B )1/3- (0.299R +0.587G +0.114B )1/3]b =200[(0.299R +0.587G +0.114B )1/3- 0.846(0.066G + 1.117B )1/3] (1)