山东交通学院
20200909届毕业生毕业届毕业生毕业论文论文论文((设计设计)) 题目:公路交通事故自动求救与自动定位系统的设计
系 别 机械工程学院机械工程学院机械工程学院 专 业 机械设计制造及其自动化机械设计制造及其自动化机械设计制造及其自动化 班 级 学 号 姓 名 指导教师
二○一三年六月
山东交通学院毕业设计(论文)
1
摘 要要
目前随着我国道路交通事业的飞速发展,交通事故猛增已成了交通管理所面临的严
重问题。交通事造成了大量的生命和财产损失。 针对此现状,本文设计了一种交通事故自动求救和自动定位的系统。
该系统单独配置加速度传感器和倾角传感器,以自动检测汽车事故的等级并相应作
出判断,然后单片机接收GPS 的定位信息和其他信息,最后通过GSM 模块将信息发送给相应部门。
本文主要介绍了定位和求救系统总体结构与工作原理、详细论述了系统软硬件的总
体设计思想及其接口电路、各功能模块的设计及其具体使用方法。
关键词:自动求救,自动定位,单片机,GPS,GSM
公路交通事故自动求救与自动定位系统的设计
Abstract
With the rapid development of road transportation, the increasing of the traffic accident has come to be a serious problem. Automobile traffic as a symbol of human civilization has brought radical changes to the precision of human being history’s development, bringing comfort and convenience. However, which has also brought some negative effect in the meantime .Traffic accident is one of the negative effect and cause a huge loss of both life and wealth. To the current situation, I design the automatic positioning system that can ask for help automatically when the traffic accident happens.
When the accident happens, the alarm will be activated. If the driver doesn’t cancel the alarm in 30 seconds which means that he or she really need to be saved, the GPS will collect some information such as longitude and latitude ,and then the MCU send some useful information to 110 ,120,and insurance company via GSM .In this way people who get injured could get timely cure, so do the accidents which can partly reduce the loss of both life and wealth.
Keywords: Automatic rescue ,Autoregistration, MCU,GPS, GSM
2
山东交通学院毕业设计(论文)
前 言
在汽车日益普及的现代社会,交通事故给人民带来了巨大的财产损失和人员伤害。调查显示,在所有交通事故的死亡人员里面,约有70%是因为错过最佳抢救时间而导致的死亡的,而这70%里面有35%的人是因为没有及时报警求救而丧失生命的,因此能否在发生交通事故的第一时间报警求救已经成为了减少交通事故人员伤亡的一个突破。
而现有的安全气囊只是在发生车祸时弹出安全气囊,起到保护作用,并没有后续的求救服务,发生交通事故时,如果驾驶员发生昏迷,且车辆所在路段又没有车辆或行人经过,驾驶员将很难得到及时的救治,如果能够尽早向外界发出求救信息,则可以挽救驾驶员的生命;而且,如果相关部门能够早一步到达事故现场,将会使调查、取证更为容易,减小了证据灭失的可能性,有助于客观公正的处理事故,及时排除隐患。
为了尽可能减少生命和财产的损失,交通事故的自动求救装置应运而生,该设计旨在解决因交通事故导致伤者昏迷丧失报警能力的问题,提高交通事故的报警求救速度,便于交警在事故的第一时间迅速出警,减小因事故导致的交通压力,同时及时呼叫急救中心,最大程度的减少人员伤亡。 该设计是把传感器、GPS定位器、单片机、GSM模块有机的结合在一起,达到交通事故自动求救的目的。其中事故发生信息由独立的碰撞传感器和加速度传感器收集,当发生重大交通事故时,倾角传感器和加速度传感器同时发送电压信号触发单片机工作,单片机将控制GPS定位器定位出交通事故地点,同时控制警报装置发出声光报警信号,若规定时间内,驾驶员没有关闭开关,则该系统判定车上人员丧失求救能力,该系统将自动为事故人员报警求救。
1
公路交通事故自动求救与自动定位系统的设计
1 绪论
1.1 课题背景
交通事故已成为“世界第一害”,而中国是世界上交通事故死亡人数最多的国家之一。从二十世纪八十年代末中国交通事故年死亡人数首次超过五万人至今,中国(未包括港澳台地区)每年交通事故50万起,因交通事故死亡人数均超过10万人,已经连续十余年居世界第一。2009年,中国汽车保有量约占世界汽车保有量的百分之三,但交通事故死亡人数却占世界的百分之十六。
2001年全国道路交通事故死亡10.6万人。 2001年全国公安交通管理部门共受理道路交通事故案件75.5万起,事故共造成10.6万人死亡,平均每天因交通事故死亡的人数已达300人(注:每5分钟有一人死于交通事故),直接经济损失30.9亿元。
2002年全国道路交通事故死亡10.9万人。2002年,中国共发生道路交通事故77.3万起,造成10.9万人死亡、56.2万人受伤,直接经济损失33.2亿元。
2003年全国道路交通事故死亡10.4万人 。2003年全国公安部门共受理一般以上道路交通事故667507起,这些事故造成104372人死亡,直接经济损失33.7亿元。2004年全国道路交通事故死亡9.4万人。
2004年中国道路交通事故死亡人数达9.4万人,居世界第一。驾驶员是道路交通安全最重要的影响因素。2004年因驾驶员因素导致的交通事故占总数的89.8%,造成的死亡人数、受伤人数分别占到了总数的87.4%和90.6%。
2005年全国道路交通事故死亡98738人。2005年,全国共发生道路交通事故450254起,造成98738人死亡、469911人受伤,直接财产损失18.8亿元。
2006年,全国共发生道路交通事故378781起,造成89455人死亡、431139人受伤,直接财产损失14.9亿元。万车死亡率为6.2。
2007年上半年全国共发生道路交通事故15.9万起,造成3.7万人死亡、18.9万人受伤,直接财产损失5.4亿元。超速行驶仍是机动车肇事的主要原因。
2008年全国道路交通事故死亡人数为73484人 。由于奥运期间开展的道路交通安全攻坚战,2008年,全国道路交通事故死亡人数为73484人,同比下降10%。
2009年,据公安部交通管理局通报,2009年,全国共发生道路交通事故238351起,造成67759人死亡、275125人受伤,直接财产损失9.1亿元。其中,酒后驾驶导致的事故死亡人数降幅明显。2009年,全国共发生道路交通事故238351起,造成67759人死亡、275125人受伤,直接财产损失9.1亿元。
2010年,全国共发生道路交通事故238351起,造成67759人死亡、275125人受伤,直接财产损失9.1亿元。
2011年,全国共接报涉及人员伤亡的道路交通事故210812起,共造成62387人死亡,其中营运客货车辆肇事50296起,占23.9%,造成20648人死亡,占33.1%。全国
2
山东交通学院毕业设计(论文)
共发生一次死亡10人以上的特大交通事故27起,造成451人死亡,其中营运客货车肇事的事故23起,造成390人死亡,分别占85.1%和86.5%。
交通事故给人们带来了巨大的财产损失和人员伤亡,如何减轻交通事故给人们带来的伤害以成为一重大课题。
1.2 课题开发的必要性和意义
交通事故的发生具有随机性和突发性,可以预防事故的发生,但不可能完全消除事故。有人对大量交通死亡事故做过调查,死亡人员中除少数在事故现场外,大多数是因受重伤而无法得到及时救护导致死亡的。法国民防部门曾做过一个统计,同样伤势的重伤员,在30 min内获救,其生存率为80%,在60 min内获救,生存率为40%,在90 min 内获救,其生存率仅为10%以下。
我国卫生部提供的一份资料表明:在l000例交通事故伤害者中,只有14.3%是乘救护车到达医院。另外,在我国车祸死亡者中只有大约40%是当场死亡,60%的人死于医院或者送往医院途中,其中约30%的受伤者因为抢救不及时而死亡。目前,我国道路交通事故紧急救护水平比较低,交通事故重伤者得到救护约在事故发生后1小时左右,有的甚至超过2小时。按照土耳其Ega的观点,在我国实施有效的交通事故紧急救援,每年交通事故死亡人数可以减少2—3万人。有资料表明,国外将电子技术、无线电通讯技术应用于交通事故的自动呼救,可有效减少事故人员伤亡。
发生交通事故时,如果驾驶员发生昏迷,且车辆所在路段又没有车辆或行人经过,驾驶员将很难得到及时的救治,如果能够尽早向外界发出求救信息,则可以挽救驾驶员的生命;而且,如果相关部门能够早一步到达事故现场,将会使调查、取证更为容易,减小了证据灭失的可能性,有助于客观公正的处理事故,及时排除隐患。
该系统不仅可用于私家车,还可用于一些特种车辆,如长途客运车、危险品货运车等,这样也方便了管理部门对车辆进行规范管理。
1.3 本课题国内外发展现状
现在国内市场GPS和GSM技术主要用于汽车的防盗报警系统方面,用于紧急求救方面的相对较少,此处挑选一具有代表性的YD-R88车载定位系统与本系统进行基本比较:(1)YD-R88车载定位系统
特点:远程监听,远程断油断电,智能电话防盗求救,超速告警,电子围栏,紧急求助等几大功能,求救时有系统内预先录制好的求救语,需手动启动,主要应用在私家车上。
(2)交通事故的自动求救系统
特点:求救信号有交通事故地点、车牌号、车型、车主电话号码等,求救方式为智能求救,可以应用于除摩托车以外的所有机动车。
3
公路交通事故自动求救与自动定位系统的设计
YD-R188车载定位系统也有紧急求助的功能,但该装置只是设置有一紧急求救按钮,当遇到紧急情况时,按下此按钮,系统将根据预先设定的第一号码和第二号码拨号,语音报出事先录制好的求救语音;但该系统无法智能地定位处汽车所在的位置,必须通过网上平台,登陆运营商的网站才能查询,且当遇到受伤人员失去知觉或者受伤严重无法移动等情况时,无法达到求救效果。
相对而言交通事故自动求救系统能智能定位、自动求救,只要系统判断交通事故达到一定等级,就会自动为车主报120、122及保险公司,将事故地点、车牌号、车型、及车主联系方式等信息发送出去。如果乘客受伤情况不严重,车主可以自行决定是否需要发送求救信息;如果伤势严重(以无知觉或无动手能力为准),系统将在提示时间过后发送求救信息,达到智能求救的目的。
该系统目前只针对自动求救功能而设计,不比市场上那些专门的车载系统功能全面,但本系统既可以独立使用,还可以联合一些车载系统共同使用,丰富了此类产品的功能性。智能判断事故等级,自动发送求救信息,而且信息全面、准确,最大可能的减少误报,提高救援效率,这是该系统的最大优势。
1.4 本课题发展趋势
近几年来,世界汽车产量一直保持增长,主要是新兴市场的增长,包括俄罗斯、印度、巴西、中国,尤其是中国。我们国家来看,就是说,这些年汽车工业增长非常快,我们占到世界汽车产量的23.5%。从国内市场看,我们已经连续四年达到世界销量第一位。
这两年我们国家比较依靠的是汽车出口,出口我们这几年不断的增长,到2012年突破历史最高水平,超过了一百万辆。在2000年左右的时候,汽车全部是进口,尤其是轿车。进口的数量大概也是这样的水平。尽管我们现在出口已经达到了超过了一百万辆,但是我们整个的汽车产量,市场里的份额占到了5%左右。所以从这一点看,我们的汽车市场主要不是国际型的市场,主要是国内市场。
这样的汽车销售量势必会给道路运输带来新的压力,而且人们将更加注重交通安全,他们迫切需要交通事故自动求救和定位系统来保证行驶的安全性。
4
山东交通学院毕业设计(论文)
2 系统总体方案的设计
2.1 无线通讯方式的确定
在系统设计中,无线通讯模块的主要功能是将求救信息发送给相关部门,以达到求救的目的。求救信息主要包括车辆位置信息和其他信息,信息发送形式主要以短信为主。目前常用无线通讯方式有红外线通信(IRDA)、蓝牙(Bluetooth)、Zigbee、Wi-Fi、GPRS、移动通信(GSM)这几种方式。
(1) 红外线通信(IRDA)
IRDA是一种利用红外线进行点对点通信的技术,主要优点有:无需专门申请特定频率的使用执照、体积小、功耗低、成本低、传输速率高,速率可达16Mb/s,可接受角度由传统的30度扩展到120度。但IRDA是一种视觉传输技术,也就是说两个具有IRDA 端口的设备之间传输数据,中间不能有阻挡物,其传输距离一般为10米。
(2) 蓝牙
蓝牙是由爱立信、IBM、Intel、诺基亚、东芝等5家公司联合制定的近距离无线通信技术标准;其传输频段为全球公众通用的2.4GHz ISM(工业、科学、医学)频段;传输速率为1Mbps;其有效传输距离一般为10m。
(3)Zigbee
Zigbee技术的主要特点:低功耗,在低耗电待机模式下,2节5号干电池可支持1个节点工作6~24个月,甚至更长;低成本;低速率;传输距离短,传输范围一般介于10~100m之间,在增加发射功率后,亦可增加到1~3km。这指的是相邻节点间的距离。如果通过路由和节点间通信的接力,传输距离将可以更远;免执照频段。使用工业科学医疗(ISM)频段,915MHz(美国), 868MHz(欧洲), 2. 4GHz(全球)。综上,Zigbee是一个低速率的短距离无线通信技术。
(4) Wi-Fi
Wi-Fi是一种可以将个人电脑、手持设备(如PDA、手机)等终端以无线方式互相连接的技术。Wi-Fi是一个无线网路通信技术的品牌,由Wi-Fi联盟(Wi-Fi Alliance)所持有,目的是改善基于IEEE 802.11标准的无线网路产品之间的互通性。其数据传输速度(11Mbps),但实际中,6Mbps已经比较理想了,其传输距离大约为95米。
(5) GPRS
GPRS是通用分组无线业务(Gene r al Packet Ra d io Se rv ice)的英文简称,是一种新的分组数据承载业务。GPRS是一种分组交换系统,因此,GPRS特别适用于间断的、突发性的或频繁的、少量的数据传输,也适用于偶尔的大数据量传输。
GPRS在达到理论最高值171.2kbps时,已经完全可以支持一些多媒体图像传输业务等对带宽要求较高的应用业务,但实际数据传输速率受网络编码方式和终端支持的因素影响。现在用户的接入速度大概在30kbps-40kbps,在使用数据加速系统后,速率体现
5
公路交通事故自动求救与自动定位系统的设计
大概在60kbps-80kbps左右。
(6)GSM
全球移动通讯系统Global System of Mobile communication就是众所周知的GSM,是当前应用最为广泛的移动电话标准。GSM标准的无处不在使得在移动电话运营商之间签署"漫游协定"后用户的国际漫游变得很平常。
其主要特点:应用广泛,GSM标准由欧洲多个国家共同制订,使得这一系统在全欧洲范围内,以及世界各地被采用;抗干扰;易于配置(软件设置);更好的安全性与保密性,在GSM种,不仅移动用户有识别号,移动设备ME(Mobile Equipment)也有识别号。ME在生产时就给它分配了一个独一无二的识别号;业务广泛。
综上所述,考虑到传输距离、信号强度、抗干扰能力等因素,选择GSM全球通讯系统来实现求救信息的发送。
2.2 定位系统的设计
定位系统的作用是确定车辆的位置信息,方便有关部门进行救援和其他工作。目前定位系统均采用GPS,即全球定位系统(Global Positioning System)。
全球定位系统是一个以空间为基础的全球卫星导航系统,可以全天候一直在任何地点位于或邻近地球在四个或更多GPS卫星畅通无阻线路范围内提供可靠的位置和时间信息。它是由美国政府维护并且任何持有GPS接收器的人都可以免费的接受信息。全球定位系统由美国国防部创建并付诸实践,最初建立在24枚卫星运行的基础之上。它建立与1973年,减少了大量的导航设备并克服了先前导航系统的局限。
2.3 检测系统的设计
检测系统主要功能是实现汽车交通事故的自动检测。原车配备的安全气囊里有加速度传感器和碰撞传感器,能实现交通事故的自动检测。但如果采用原车安全气囊传感器势必会对原车气囊带来干扰,故本系统采用独立的倾角传感器和碰撞加速度传感器实现汽车事故的自动检测。
倾角传感器和碰撞加速度传感器分别检测汽车倾翻情况和撞击程度,两者只要其一达到或超过预设值就激发自动求救系统工作。
2.4 系统总体方案的确定
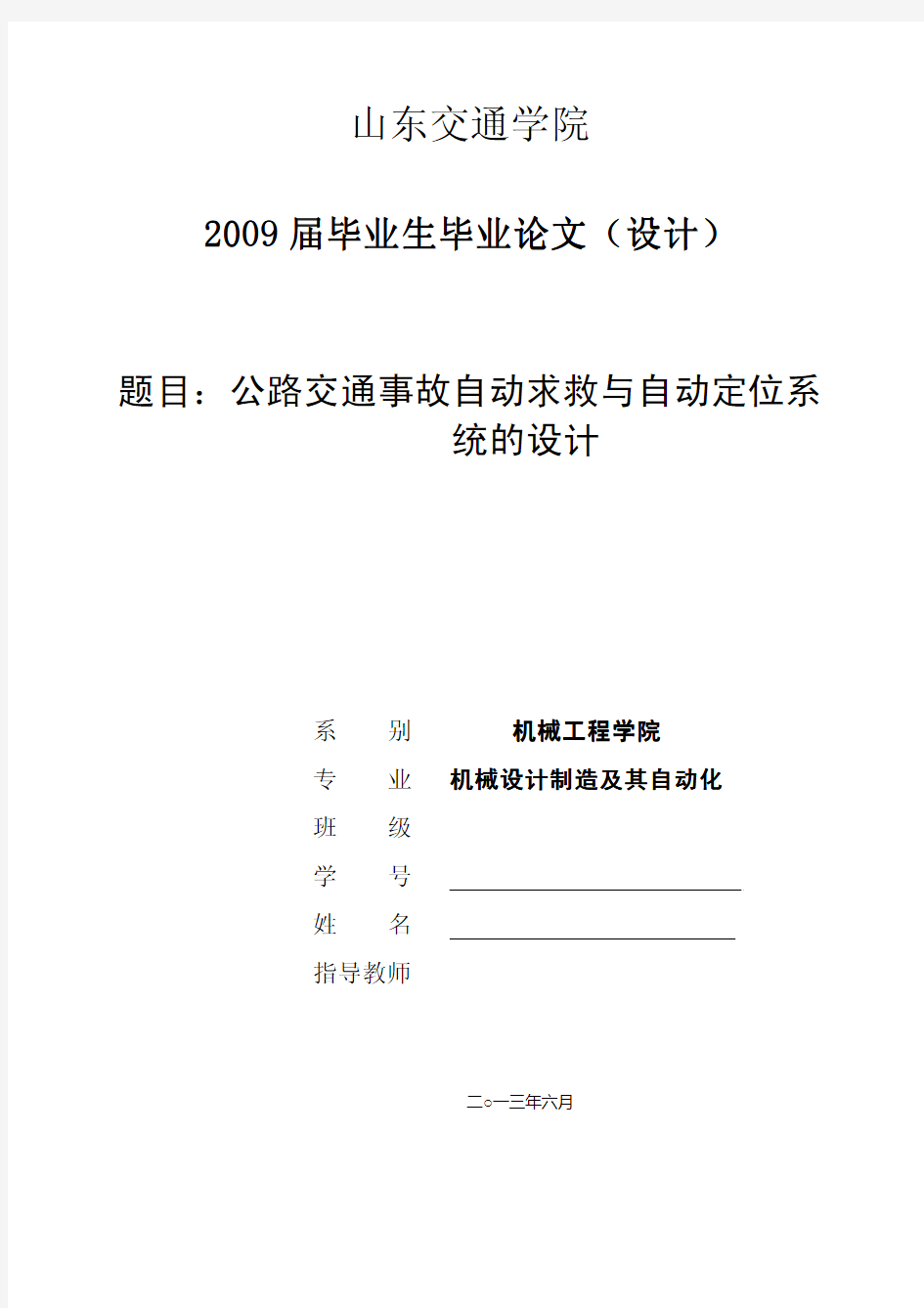
系统由检测部分、定位部分、无线通讯部分、报警部分和显示部分等组成,如图2.1所示。
当出现交通事故时,通过安装的倾角传感器和加速度传感器将检测的信号处理后传送给单片机。单片机内存储有包含车辆、驾驶员的相关资料的求援信息(如车辆型号、牌照、车主电话等),并且通过GPS定位系统将车辆位置通过无线通信模块发送出去。
6
山东交通学院毕业设计(论文)
其工作步骤为:
(1)单片机实时监测倾角传感器和碰撞传感器的输出信号,若满足求救条件,则进入步骤(2),否则继续监测
(2)单片机向GPS模块调取当前车辆位置信息,对当前车辆位置信息和求援信息作发送前预处理,并控制声、光求救装置进行求救,进入步骤(3);
(3)在设定的延迟时间30秒内,单片机检测是否有来自人机交互装置(即下图中的开关)的关闭求救信号,有,立即关闭声、光求救装置,取消步骤(2)中的发送前预处理的操作,返回步骤(1);超过延迟时间,仍无来自人机交互装置的关闭求救信号,则保持声、光求救装置的开启状态,进入步骤(4);
(4)单片机控制GSM模块,将求援信息和当前车辆位置信息发送至120求救平台、110求救平台、122交通管理中心以及车辆所属的保险公司。
图2.1系统方案图
Fig. 2.1System layout
7
公路交通事故自动求救与自动定位系统的设计
3无线通讯系统的设计
3.1 GSM简介
GSM是全球移动通讯系统Global System of Mobile communication的英文缩写,是当前应用最为广泛的移动电话标准。全球超过200个国家和地区超过10亿人正在使用GSM电话。GSM 较之它以前的标准最大的不同是它的信令和语音信道都是数字式的,因此GSM被看作是第二代 (2G)移动电话系统。 这说明数字通讯从很早就已经构建到系统中。GSM是一个当前由3GPP开发的开放标准。
GSM(Global System for Mobile communication)系统是目前基于时分多址技术的移动通讯体制中比较成熟、完善、应用最广泛的一种系统。目前已建成的覆盖全国的GSM 数字蜂窝移动通信网,是我国公众移动通信网的主要方式。基于GSM的短信息服务,是一种在移动网络上传送简短信息的无线应用,是一种信息在移动网络上储存和转寄的过程。GSM模块是继GSM手机外又一种非常重要的GSM移动通信系统终端设备。它是传统调制解调器与GSM无线移动通信系统相结合的一种数据终端设备,也称为GSM Modem。
GSM系统有几项重要特点:防盗拷能力佳、网络容量大、手机号码资源丰富、通话清晰、稳定性强不易受干扰、信息灵敏、通话死角少、手机耗电量低、机卡分离。
其主要技术特点如下:
(1) 频谱效率高。由于采用了高效调制器、信道编码、交织、均衡和语音编码技术,使系统具有高频谱效率。
(2) 容量大。由于每个信道传输带宽增加,使同频复用栽干比要求降低至9dB,故GSM系统的同频复用模式可以缩小到4/12或3/9甚至更小(模拟系统为7/21);加上半速率话音编码的引入和自动话务分配以减少越区切换的次数,使GSM系统的容量效率(每兆赫每小区的信道数)比TAC S系统高3~5倍。
(3) 话音质量好。鉴于数字传输技术的特点以及GSM规范中有关空中接口和话音编码的定义,在门限值以上时,话音质量总是达到相同的水平而与无线传输质量无关。
(4) 开放的接口多。GSM标准所提供的开放性接口,不仅限于空中接口,而且报刊网络直接以及网络中各设备实体之间,例如A接口和A bis接口。
(5) 安全性好。通过鉴权、加密和T MS I号码的使用,达到安全的目的。鉴权用来验证用户的入网权利。加密用于空中接口,由SIM卡和网络AUC的密钥决定。T MS I是一个由业务网络给用户指定的临时识别号,以防止有人跟踪而泄漏其地理位置。
(6) 与I S DN、PS TN等的互连。与其他网络的互连通常利用现有的接口,如I S U P或TU P等。
(7) 在S I M卡基础上实现漫游。漫游是移动通信的重要特征,它标志着用户可以从一个网络自动进入另一个网络。GSM系统可以提供全球漫游,当然也需要网络运营者之间的某些协议。
8
山东交通学院毕业设计(论文)
3.2 GSM移动通信原理
GSM移动通信原理是基于TDMA的数字蜂窝移动通信系统,GSM是世界上第一个对数字调制、网络层结构和业务作了规定的蜂窝系统。GSM移动通信原理是为了解决欧洲第一代蜂窝系统四分五裂的状态而发展起来的。在GSM之前,欧洲各国在整个欧洲大陆上采用了不同的蜂窝标准,对用户来讲,就不能用一种制式的移动台在整个欧洲进行通信。另外由于模拟网本身的弱点,使得它的容量也受到了限制。
欧洲电信联盟在1980初期就开始研制一种覆盖全欧洲的移动通信系统,即现在被人们称为GSM的系统。如今GSM移动通信系统已经遍及全世界,即所谓"全球通",目前我国的移动通信网就是以GSM系统为基础的移动网络系统。GSM移动通信原理是一种典型的基于TDMA的数字蜂窝移动通信系统,GSM系统总体结构由以下功能单元组成:
(1) 移动台(MS)
它包括移动设备(ME)和用户识别模块(SIM)。根据业务的状况,移动设备可包括移动终端(MT),终端适配功能(TAF)和终端设备(TE)等功能部件。
(2) 基站子系统(BSS)
基站(BTS):为一个小区服务的无线收发信设备。
① 基站控制器(BSC):具有对一个或多个BTS进行控制以及相应呼叫控制的功能,BSC以及相应的BTS组成了BSS(基站子系统)。BSS是在一定的无线覆盖区中,由移动业务交换中心(MSC)控制,与MS进行通信的系统设备。
② 基站发信台(BTS):受控于基站控制器(BSC),属于基站子系统(BSS)的无线部分,服务于某小区的无线收发信设备,实现BTS与移动台(MS)空中接口的功能。BTS主要分为基带单元、载频单元和控制单元三部分。基带单元主要用于话音和数据速率适配以及信道编码等;载频单元主要用于调制/解调与发射机/接收机间的耦合;控制单元则用于BTS的操作与维护。 BTS中存储编码算法A5和密钥Kc,用于解密接收到的密文形式的用户数据和信令数据(包括解密)。
(3) 网络子系统(NSS)
网络子系统主要包含GSM系统的交换功能和用户数据系统新管理、安全性管理所需的数据库功能,它对GSM移动用户之间的通信和GSM移动用户与其他通信网用户之间的通信起着管理作用。NSS由一系列功能实体构成,整个GSM系统内部,即NSS的各功能实体之间和NSS与NSS之间都通过符合源CCITT信令系统N o.7协议和GSM规范的7号信令网络互相通信。
① 移动业务交换中心(MSC):对于位于它管辖区域中的移动台进行控制、交换的功能实体。
② 拜访位置寄存器(VLR):MSC为所管辖区域中MS的呼叫接续,所需检索信息的数据库。VLR存储与呼叫处理有关的一些数据,例如用户的号码,所处位置区的识别,向用户提供的服务等参数。
9
公路交通事故自动求救与自动定位系统的设计
③ 归属位置寄存器(HLR):管理部门用于移动用户管理的数据库。每个移动用户都应在其归属位置寄存器注册登记。HLR主要存储两类信息,有关用户的参数和有关用户目前所处位置的信息。
④ 设备识别寄存器(EIR):存储有关移动台设备参数的数据库。主要完成对移动设备的识别、监视、闭锁等功能。
⑤ 鉴权中心(AUC):认证移动用户的身份和产生相应鉴权参数(随机数RAND,符号响应SRES,密钥Kc)的功能实体。
(4) 操作支持子系统(OSS)
操作维护系统中的各功能实体,依据厂家的实现方式可分为无线子系统的操作维护中心(OMC-R)和交换子系统的操作维护中心(OMC-S)。
GSM系统可通过MSC实现与多种网络的互通,包括PSTN、ISDN、PLMN和PSPDN。
3.3 GSM模块的选择
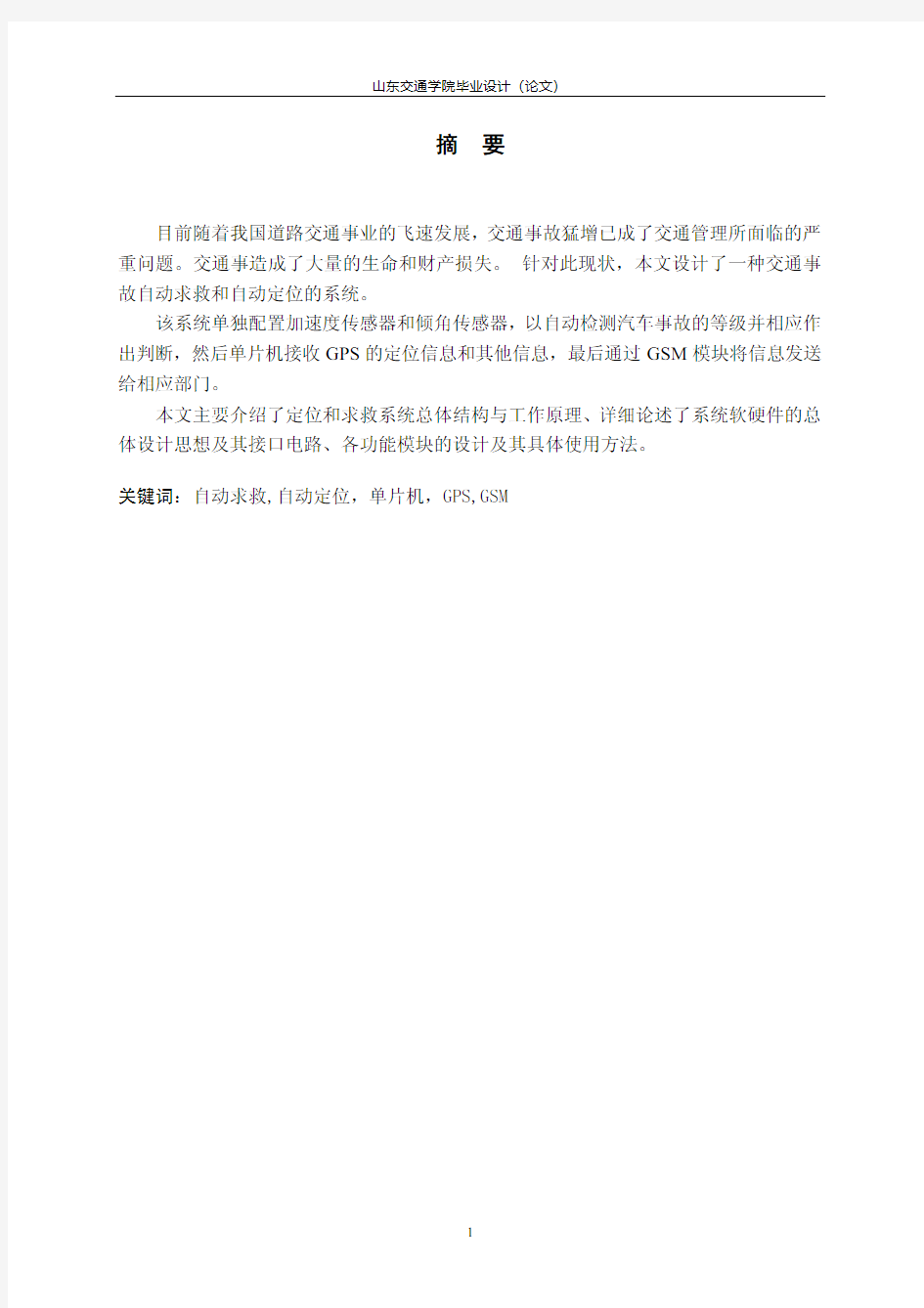
GSM模块是天祥电子最新推出的一款高性能模块。它采用德国西门子工业GSM模块 TC35I,可以实现上位机控制 GSM 模块打电话、接电话、挂电话、发送短信息、接收短信息等,本GSM模块板载单片机,可以利用单片机来实现打电话、接电话、挂电话、发送短信息、接收短信息;不仅如此,利用单片机可以对接收到的短信息进行解析,并根据短信息内容进行相关操作,例如打开与关闭继电器等,从而实现远程控制。其具体组成如图3.1所示,本 GSM模块有如下特性:
⑴ 接口方式支持串口、USB接口
⑵ 工作在 EGSM900 和 GSM1800 双频段
⑶ 自适应波特率为 1.2kb/s~115kb/s
⑷ 支持语音和数据信号传输
⑸ 利用 AT 指令可双向传输指令和数据
⑹ 支持 Text 和 PDU 格式的 SMS(Short Messa g e Ser vi ce 短消息)
⑺ 可通过 AT 指令或关断信号实现重启和故障恢复
主要参数
⑴ 尺寸:91mm×61mm
⑵ 功耗:EGSM900(4 类)和 GSM1800(1 类)分别为 2W 和 1W
⑶ 工作电压:DC4.2V
⑷ 工作电流:休眠状态为 3.5m A,发射状态为 300m A(平均),2.5A 峰值空闲状态为 25m A
⑸ 电源输入:DC5V~DC12V
10
山东交通学院毕业设计(论文)
图3.1 GSM模块图
Fig. 3.1 GSM diagram
11
公路交通事故自动求救与自动定位系统的设计
4 自动定位系统的设计
4.1 GPS定位系统简介
全球定位系统是一个以空间为基础的全球卫星导航系统,可以全天候一直在任何地点位于或邻近地球在四个或更多GPS卫星畅通无阻线路范围内提供可靠的位置和时间信息。它是由美国政府维护并且任何持有GPS接收器的人都可以免费的接受信息。全球定位系统由美国国防部创建并付诸实践,最初建立在24枚卫星运行的基础之上。
GPS导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。而用户到卫星的距离则通过记录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR):当GPS卫星正常工作时,会不断地用1和0二进制码元组成的伪随机码(简称伪码)发射导航电文。GPS系统使用的伪码一共有两种,分别是民用的C/A码和军用的P(Y)码。C/A码频率1.023MHz,重复周期一毫秒,码间距1微秒,相当于300m;P码频率10.23MHz,重复周期266.4天,码间距0.1微秒,相当于30m。而Y码是在P码的基础上形成的,保密性能更佳。
导航电文包括卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息。它是从卫星信号中解调制出来,以50b/s调制在载频上发射的。导航电文每个主帧中包含5个子帧每帧长6s。前三帧各10个字码;每三十秒重复一次,每小时更新一次。后两帧共15000b。导航电文中的内容主要有遥测码、转换码、第1、2、3数据块,其中最重要的则为星历数据。当用户接受到导航电文时,提取出卫星时间并将其与自己的时钟做对比便可得知卫星与用户的距离,再利用导航电文中的卫星星历数据推算出卫星发射电文时所处位置,用户在W GS-84大地坐标系中的位置速度等信息便可得知。
可见GPS导航系统卫星部分的作用就是不断地发射导航电文。然而,由于用户接受机使用的时钟与卫星星载时钟不可能总是同步,所以除了用户的三维坐标x、y、z外,还要引进一个Δt,即卫星与接收机之间的时间差作为未知数,然后用4个方程将这4个未知数解出来。所以如果想知道接收机所处的位置,至少要能接收到4个卫星的信号。
GPS接收机可接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及GPS系统信息,如卫星状况等。
GPS接收机对码的量测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。对0A码测得的伪距称为U A码伪距,精度约为20米左右,对P码测得的伪距称为P码伪距,精度约为2米左右。
GPS接收机对收到的卫星信号,进行解码或采用其它技术,将调制在载波上的信息去掉后,就可以恢复载波。严格而言,载波相位应被称为载波拍频相位,它是收到的受
12
山东交通学院毕业设计(论文)
多普勒频 移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。一般在接收机钟确定的历元时刻量测,保持对卫星信号的跟踪,就可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度,只能在数据处理中作为参数解算。相位观测值的精度高至毫米,但前提是解出整周模糊度,因此只有在相对定位、并有一段连续观测值时才能使用相位观测值,而要达到优于米级的定位 精度也只能采用相位观测值。
按定位方式,GPS定位分为单点定位和相对定位(差分定位)。单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量,大地测量或工程测量均应采用相位观测值进行相对定位。
在GPS观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响,在进行相对定位时大部分公共误差被抵消或削弱,因此定位精度将大大提高,双频接收机可以根据两个频率的观测量抵消大气中电离层误差的主要部分,在精度要求高,接收机间距离较远时(大气有明显差别),应选用双频接收机。
4.2 NMEA‐0183协议
NMEA-0183是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备制定的标准格式。目前业已成了GPS导航设备统一的RTCM(Radio Technical Commission for Maritime services)标准协议。其具体定位信息和命令如表4.1所示。
表4.1 NMEA 0183
Tab. 4.1 NMEA 0183
序号 命令 说明 最大帧长
1 $GPGGA 全球定位数据 72
2 $GPGSA 卫星PRN数据 65
3 $GPGSV 卫星状态信息 210
4 $GPRMC 运输定位数据 70
5 $GPVTG 地面速度信息 34
6 $GPGLL 大地坐标信息
7 $GPZDA UTC时间和日期
注1):发送次序$GPZDA、$GPGGA、$GPGLL、$GPVTG、$GPGSA、$GPGSV*3、$GPRMC
13
公路交通事故自动求救与自动定位系统的设计
14
协议帧总说明:
该协议采用ASCII 码,其串行通信默认参数为:波特率=4800bps,数据位=8bit,开始位=1bit,停止位=1bit,无奇偶校验。
帧格式形如:$aaccc,ddd,ddd,…,ddd*hh(CR)(LF)
(1) “$”——帧命令起始位
(2) aaccc——地址域,前两位为识别符,后三位为语句名
(3) ddd…ddd——数据
(4) “*”——校验和前缀
(5) hh——校验和(check sum),$与*之间所有字符ASCII 码的校验和(各字节做异或运算,得到校验和后,再转换16进制格式的ASCII 字符。)
(6) (CR)(LF)——CR(Carriage Return) + LF(Line Feed)帧结束,回车和换行
4.2.1 GPGGA
在NMEA-0183中,最常用的的定位信息是全球定位数据,故本设计在使用GPS 模块时,发送给相关部门的定位信息以此为主。GPGGA 是GPS 固定数据输出语句,这是一帧GPS 定位的主要数据,也是使用最广泛的数据,一般的车载系统常用此数据。其格式如下:
$GPGGA,(1),(2),(3),(4),(5),(6),(7),(8),(9),(10),(11),(12),(13),(14)*(15)(CR)(LF)
(1) UTC 时间,格式为hhmmss.sss
(2) 纬度,格式为ddmm.mmmm(前导位数不足则补0)
(3) 纬度半球,N 或S(北纬或南纬)
(4) 经度,格式为dddmm.mmmm(前导位数不足则补0)
(5) 经度半球,E 或W(东经或西经)
(6) 定位质量指示,0=定位无效,1=定位有效
(7) 使用卫星数量,从00到12(前导位数不足则补0)
(8) 水平精确度,0.5到99.9
(9) 天线离海平面的高度,-9999.9到9999.9米
(10) 高度单位,M 表示单位米
(11) 大地椭球面相对海平面的高度(-999.9到9999.9)
(12) 高度单位,M 表示单位米
(13) 差分GPS 数据期限(RTCM SC-104),最后设立RTCM 传送的秒数量
(14) 差分参考基站标号,从0000到1023(前导位数不足则补0)
(15) 校验和
山东交通学院毕业设计(论文)
4.3 NMEA 输入输出报文
4.3.1 NMEA输出报文
GPS输出报文是GPS输出定位信息的形式,其报文具体内容如表4.2所示:
表4.2 NMEA输出报文
Tab. 4.2 NMEA output message
NMEA标记 说明
GGA 全球定位系统固定数据
GLL 地理信息——纬度/经度
GSA GNSS DOP(定位点) 活动卫星
GSV 可见GNSS(定位)卫星
RMC 推荐的最小具体定位数据
VTG 对地航向和对地速度
4.3.2 NMEA输入报文
NMEA 输入报文提供了允许通过NMEA协议控制GPS的方法,传输格式如表4.3所示,输入报文如表4.4所示。
表4.3 传输格式
Tab. 4.3 Transformed pattern
起始符 数据 校验码 终止符
$PSRF(MID)1 DATA2 *CKSUM3 (CR)(LF)4
(1)起始符包含3个字节,从MID100开始(Message identifier consisting of three numeric characters. Input messages begin at MID 100.)。??????
(2)具体数据,特定的数据序列(data)…(date)。
(3)NMEA定义的校验是2个HEX的字符,适用于所有输入报文。
(4) 所有输入报文都以回车符(CR)和换行符(LF)结束,即\r\n,十六进制码为0D0A。因为\r\n是不可打印的ASCII字符,是示例字符串,但必须发送强制其作为输入报文的终止符。
15
公路交通事故自动求救与自动定位系统的设计
表4.4 输入报文
Tab.4.4 The input messag e
报文 报文标识符(MID) 说 明
设置串口 100 设置口A参数和协议
导航初始化 101 适用于以X/Y/Z 开始的参数 设置DGPS口 102 设置口B的用于DGPS输入的参数
查询/速率控制 103 查询标准的NMEA报文和设置输
出速率
LLA 导航初始化 104 适用于以Lat/Lon/Alt(输入必
须与WGS84相匹配) 开始的参数 扩展数据开关 105 扩展数据开关
4.4 GPS模块的选择
综合考虑各方面因素,选择环天EB-3531 GPS模块,其基本参数如下:
产品类型 GPS模块
产品尺寸 15×13×2.2mm ±0.2mm
卫星通道 20通道
速度精度 0.1m/s
启动时间 冷启动:42秒 热启动:1秒
其他导航功能 差分模式:DGPS
工作温度 -30℃-+85℃
存放温度 -40℃-+85℃
16
山东交通学院毕业设计(论文)
5 传感器的选择
5.1 倾角传感器的选择
5.1.1 倾角传感器的简介
倾角传感器经常用于系统的水平测量,从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器,倾角传感器还可以用来测量相对于水平面的倾角变化量。
其理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。
种类粗分为单轴和双轴两种,选择时根据所需要测量几个方向的倾角,如果是一个就用单轴的,如果是两个方向的(俯仰和横滚)就选用双轴的。
5.1.2 倾角传感器的选择
本设计选择LCA320T电压输出型双轴倾角传感器,LCA320T 系列倾角是瑞芬开发的一款小体积低成本双轴倾角传感器,是一款电压输出倾角传感器,主要针对体积与成本有高限制性的应用市场。由于内置了最新的微机电生产工艺倾角单元,体积小,功耗低,并且微机电工艺的一致性和稳定性很高,工作温度达到工业级别-40~+85,是一款性价比超高的倾角模块。
本产品采用非接触式测量原理,能实时输出当前的姿态倾角,使用简单,无需找回相对变化变的两个面安装。体积小、抗外界电磁干扰能力强、承受冲击震动能力强。 其主要特性:
⑴ 双轴倾角量测
⑵ 量程±0°~±90°可选
⑶ 宽电压输入9~36V
⑷ 输出方式0~5V
⑸ 宽温工作-40~+85℃
⑹ IP67 防护等级
⑺ 高抗振性能)3500g
⑻ 高分辨率0.05°
⑼ 小体积55×37×24mm(可定制)
17
城市轨道交通运营管理毕业论文范文
哈尔滨铁道职业技术学院 毕业论文 设计题目城市轨道交通的客运一体化枢纽研究 学生姓名陈怡婷 专业班级城市轨道交通运营管理(客运方向)客运(3)班指导教师张冰 城市轨道交通学院 2012年4月1 日 城市轨道交通的客运一体化枢纽研究
摘要 大力发展以城市轨道交通为骨架的公共交通体系是解决我国大城市交通供需矛盾的根本途径,而基于城市轨道交通客运一体化枢纽布设的好坏是整个公共交通系统优化的关键。 基于城市轨道交通的客运一体化枢纽就是:应充分结合地铁、公交站场、公路主枢纽等交通专项规划,在科学合理的布局选择的前提下规划建设集地铁、公交、长途客运、停车、出租等交通方式中几种方式于一体的立体交通枢纽,通过各种交通设施的合理布设与组合以及地下、地面与高价空间的协调利用,解决几种客运方式之间的无缝接驳,为客流、车流的便捷组织疏导提供充分的空间与有效的载体。 论文首先阐述了客运一体化枢纽的涵义并将其分类,然后分析了国内外的客运交通综合枢纽的现状和发展趋势,重点对基于城市轨道交通的客运一体化枢纽在线网上布设遗迹枢纽内部各交通方式的换乘衔接亮哥方面进行了研究。在线网布设方面:论文提出客运一体化枢纽布设原则、影响因素、指标体系和评价方法、方案形成步骤及备选节点确定方法,对各项指标进行分析,最终得出布设方案。在换乘衔接方面:论文探讨了交通方式间的换乘衔接方法,辅助设施的设计,提出了枢纽土地落实途径及政策建议,最后,运用客运一体化枢纽内部换乘衔接相关理论对东直门轨道交通综合枢纽进行了概念性的设计。 关键词:轨道交通、客运一体化、布设、换乘衔接、枢纽
城市轨道交通毕业论文 哈尔滨铁道职业技术学院二号黑体居中 间 距或毕业论文约毕业论文字号:初号,黑体居中 3 c m 论文题目城市轨道交通运营安全管理模式的研究 学生姓名 专业班级 指导教师 小 三 号 黑 体城市轨道交通学院 , 本年月日 页 最 后 一 行 哈尔滨铁道职业技术学院城市轨道交通分院毕业论文安全管理
摘要 城市轨道交通运营专业性强、技术设备复杂、客流量大,造成城市轨道交 通安全运营管理的难度较大,因而建立城市轨道交通运营安全管理模式,预防事故发生,提高事故应急处理能力,降低运营中安全事故的社会危害性,已成为当前城市轨道交通运营管理的重中之重。 本文从安全管理模式发展研究入手,分析了安全管理模式的发展趋势探讨了四种安全管理模式的风险控制水平。并对城市轨道交通运营事故及原因进行了统计分析,研究了城市轨道交通运营安全的影响因素,在此基础上,提出了城市轨道交通运营安全管理模式。 本文将安全系统理论、安全风险学、持续改进及安全行为科学等现代管理理论融入到城市轨道交通运营安全管理中,根据安全管理模式设计理论,从安全管理的宏观指导、结构分析、操作方式三个层湎出发,提出了城市轨道交通运营安全管理模式。该模式将运营管理分解为计划、实施、校验、评审四个单元。并依据理论维、目标维、控制维的不同需求提出上诉四个单元的基本管理要素。各要素在总体方针的指导下,相互关联相互促进,形成一套结构化动态管理体系。 最后,本文在此基础上,进一步探讨了城市轨道交通运营安全管理模式各要素的实施流程以及体系进行过程中应当注意的问题。 关键词:城市轨道交通;运营安全;安全管理模式。 - 2 - 哈尔滨铁道职业技术学院城市轨道交通分院毕业论文目录 1 绪论…………………………………………………………………………………3 1.1研究背景……………………………………………………………………………3 1.2国内外研究现状……………………………………………………………………4 1.2.1国外研究现状
毕业设计说明书 基于单片机的智能小车系统 设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
08汽车毕业设计(论文)任务书 设计时间:2010年10月25日-2011年5月25日 指导教师: 电话: E—mail: 一、目的 毕业设计与毕业实习论文是完成教学计划达到专科生培养目标的重要环节,是教学计划中综合性最强的实践教学环节,通过这项实践环节可以培养学生的思想、工作作风,提高学生的实际各项能力,提高毕业生全面素质。 毕业设计与毕业实习论文的教学目标是使学生在以下几方面的能力得到训练和提高: 1、综合运用所学专业知识分析、解决实际问题的能力; 2、掌握文献检索、资料查询的基本方法及获取新知识的能力; 3、书面和口头表达的能力; 4、协作配合工作的能力. 二、对毕业学生的要求 1、学生在此期间应定期与指导教师联系,汇报设计进展情况; 2、及时将疑难问题请教指导教师; 3、严禁抄袭,否则毕业设计无成绩; 4、按要求在5月30日前上交论文给指导教师,过期不予答辩; 5、未按要求完成论文的学生不能毕业; 6、要求计算说明书计算准确、文字通顺、书写工整; 7、要求图纸、图面布置合理、正确清晰、符合制图标准及有关规定。 三、相关说明 1、每个学生必须独立完成毕业设计论文; 2、论文书写规范、文字通顺、图表清晰、测试数据完整、结论明确,论文后附参考文献名; 3、字数一般不少于4000字; 4、论文正文字体为小四号,用A4纸打印,装订成册。
五、成绩评定办法 参见毕业综合实践(毕业论文)成绩评定办法执行。 六、毕业论文的参考课题 可以结合本身工作性质,在提前告知指导教师并得到认可后,可自选题目。也可从以下(一)或(二)课题中任选一个课题: (一)毕业设计及论文的自选参考课题如下 汽车检测与维修专业毕业论文选题方向和标题参考 一、某种车型某个系统(或总成)的结构特点和检修分析,如: 1、帕萨特B5轿车防抱死系统及其检修 2、汽车排放污染的控制技术 3、浅谈捷达轿车电控燃油喷射系统
……………………………………⊙……装…………………………⊙……订………………………⊙……线……………………………………城市轨道交通毕业论文 题目: 北京大尖山隧道 DK52+800~DK73+587.5 施工组织设计 系 别: 铁 道 工 程 系 专 业: 城市轨道交通工程
……………………………………⊙……装…………………………⊙……订………………………⊙……线…………………………………… 目 录 第一章 工程概况 (1) 1.1 编制依据......................................................................................................................1 1.2 工程范围及工程数量..................................................................................................1 1.3 工程地质条件..............................................................................................................1 1.4 隧道设计......................................................................................................................3 1.5节 隧道施工环境.........................................................................................................3 第二章 现场的施工现状 ........................................................................... 4 第三章 施工总体安排及施工方案 (4) 3.1 隧道进洞方法与开挖支护..........................................................................................4 3.2 止水帷幕施工............................................................................................................16 3.3 B 断面端头加固袖阀管施.......................................................................................17 3.4 地表管线加固施工....................................................................................................17 3.5 对元岗大桥桥基临时加固的预备措施....................................................................17 3.6 管棚施工....................................................................................................................19 3.7 爆破施工....................................................................................................................20 3.8 A 、B 断面隧道施工................................................................................................25 第四章 施工工艺 .. (36) 4.1 喷射混凝土................................................................................................................36 4.2钢筋网安设.................................................................................................................37 4.3 格栅拱架加工与架立................................................................................................37 4.4 超前小导管、注浆小导管和锁脚锚管施工............................................................38 4.5 防水层施工................................................................................................................42 4.6 仰拱施工....................................................................................................................43 4.7 二次衬砌施工............................................................................................................44 4.8 衬砌背后注浆............................................................................................................45 4.9 进洞3m 前的井点降水.............................................................................................46 第五章 工程测量与监控量测 .. (48)
浅议城市轨道交通运营管理 内容提要: 在概述国外主要城市的轨道交通运营管理现状的基础上, 针对我国城市轨道交通的实际, 提出我国城软交通的管理体制和运营 管理与机制策略两大方面的建议。 关键词: 城市轨道交通警惕管理体制运营管理 作为一个现代化城市, 轨道交通已经不是可有可无的问题, 而 是必须具备的,当今, 有无城轨交通已经成为现代化城市的标志之一, 也已成为衡量国际化大都市的标志之一。进人21 世纪, 各国轨道交通 发展势头迅猛。已经建成相当规模城轨交通的城市, 正在进一步完善 其系统, 一些国家和地方恢复了有轨电车, 如北美、欧洲旧本、澳大 利亚的一些城市; 一些认识不足或过晚的甚至走了弯路的国家和城市 重新审时度势, 纷纷作出了发展城轨交通的决策, 如泰国的曼谷、美 国的洛杉矶等城市; 已经从城轨发展中获得好处的国家, 又加大了建 设力度, 或扩大规模增加线路、或改进装备、或提高服务质量。总之, 进人21 世纪后, 随着国家十二五规划发展和国家的大力支持,我国 的城轨交通, 其中地铁、轻轨、市郊或城市铁路将得到迅猛发展。为 我们出行提供了诸多的便利。 一、世界主要城市城轨交通运营管理状况及存在问题 城轨交通的建设过程, 大致可以分为3 个阶段: 即线网规划与设 计阶段、实施与施工阶段、建成与运营管理阶段。当今世界城轨交通 运营管理中仍存在问题。 1、管理体制方面 世界各国各大城市轨道交通的管理体制形式多样, 但它们都与建设资 金来源有关, 即投资主体的不同, 就决定了采取不同的管理体制。英 国伦敦的国铁和地铁是通勤运输的主要工具其中市郊铁路由国铁管理, 其管理体制是国有国营性质, 地铁和公共汽车由地方运输公司经营。 法国巴黎轨道交通包括地铁、地区快速铁路(R E R )和市郊铁路, 其 中R E R 由运输公司和国铁共同管理, 市郊铁路属于国铁, 其管理体 制既有国有国营,也有国铁与地方共同管理。美国纽约公共交通由地 铁、通勤铁路和公共汽车组成, 地铁由城市运输管理局经营管理, 市
毕业设计(论文) 城市轨道交通车站消防系统的研究
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
绪论 在当前的这个环境,随着不断进步的生产技术,各个企业对自动化技术的要求也是越来越高。智能车辆或者与智能车辆相关的产品已经开始成为各种自动化系统的关键设备,这其中主要包括了物流、运输等系统。所以,智能车辆被越来越多的人们所关注,同时,也有越来越多的国家开始对智能车辆的开发和设计进行积极的研究。 智能小车是一个典型的高科技综合系统。智能小车包含了多种高新科技的系统,而这些系统又运用了更多的高新技术,其中包括了对环境的探测、传感,对运行路线的决策、计算,以及信息通讯和自动控制行驶等多种功能。简单的来讲,智能小车就是将双腿变成了的多个轮子的移动机器人。所以,智能小车在机械和电路的设计方面,都要比其他智能机器人的运行也更稳定,也更加简单。另外,由于智能小车的优点就在于控制简便,运行稳定,所以对智能小车的行驶的速度与方向之间的配合就有比较严格的要求。首先,小车可以通过传感器来获取当前道路状况,然后将传感器获取到的数据传输到处理器,处理器再结合小车当前的行驶状态,迅速地进行计算,对小车的行驶的方向和行车的速度进行快速的调整改变,进而对目标道路进行迅速准确的跟踪。 1.开发概述 1.1 研究现状 移动机器人出现于20世纪06年代,当时斯坦福研究院(SRI)的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制[1]。从此,移动机器人作为机器人学中的一个重要分支,从无到有,数量开始不断的增多。 在目前的环境下,由于企业的生产技术在不断进步,对自动化技术的要求也在一直的加深,在未来工业生产和日常生活中,智能小车系统将会扮演重要的角色,智能小车将会在人们的视野中出现地越来越频繁。 1.2 选题意义 随着科技的不断发展,人们也越发的开始关注一些研发人工智能产品的情况。智能小车可以在各种条件恶劣的情况下代替人们进行一些复杂的任务,例如排雷防爆,矿区检测,狭窄的地方进行货物搬运等。正是由于这种智能小车设备有非常多的运用前景,所以对智能小车的进行寻迹避障的研究设计就是目前首要的目标,因为小车需要正确的在规定的路线中行进并执行相应的任务。
郑州工业应用技术学院 毕业论文 题目:汽车润滑系统的常见故障及排除 指导教师:郭斌峰职称:老师 学生姓名:赵鑫学号:1302020157 专业:汽车运用技术 院(系):机电工程学院 答辩日期:2016年6月01日 2016年6月01日
摘要 发动机的润滑是由润滑系来实现的。润滑系的基本任务就是将润滑油不断地供给各零件的摩擦表面使其润滑,减少零件的摩擦和磨损。润滑系虽然不参加发动机能量转换,却能保证发动机正常工作,使其有较长的使用寿命。 作为汽车业维修人员,我们应该知道润滑系的组成和功用,并应对润滑系的常见故障现象、故障部位、故障的检测、诊断和排除有一定的认识,明确其检测和诊断的基本思路。本设计讲述了发动机润滑系的组成与功用,润滑方式,机油的使用性能,润滑系常见故障诊断与排除,以及普桑的维修案例。随着汽车科技的发展,汽车的结构越来越复杂。我们只有掌握更多的知识和实践经验,才能更好地运用检测仪器快速准确地查找汽车的故障原因,并把故障排除。 关键词:润滑系,功用,故障排除,维护
目录 第一章概述 1.1 润滑系的概述 (1) 1.2 发动机润滑方式 (1) 1.3 发动机润滑系的油路 (2) 1.4发动机润滑系的组成 (3) 1.5 润滑系的主要部件 (3) 1.5.1 机油泵 (3) 1.5.2 安全阀 (5) 1.5.3 机油滤清器 (5) 1.5.4 机油散热器 (6) 1.5 .5曲轴箱通风 (6) 第二章润滑剂 (7) 2.1润滑剂的分类和作用 (8) 2.2润滑油的使用特性及机油添加剂的性能 (8) 2.2.1机油的使用特性 (8) 2.2.2 机油添加剂的作用 (8) 2.3机油的更换及注意事项 (9) 第三章润滑系常见故障的诊断 (9) 3.1机油压力过低 (9) 3.2机油压力过高 (10) 3.3机油消耗过多 (11) 第四章普桑润滑系故障维修实例 (13) 4.1 机油报警灯闪亮,报警器响 (13) 4.2机油警报器响个不停 (13)
学号: XXXXXXXXXXXXXXX 毕业论文(设计)说明书轨道交通供电系统的SCADA系统应用论文 学生××× 专业名称电气工程及其自动化 指导教师××× 网络教育学院
2011年 6 月 10 日 学号:XXXXXXXXXXXXXXX 华南理工大学网络教育学院毕业论文(设计)轨道交通供电系统的SCADA系统应用论文 ××× 指导教师:××× 网络教育学院 专业名称:电气工程及其自动化 论文提交日期: 2011年6月10日论文答辩日期: 2011年6月18日论文评阅人:×××××××××
华南理工大学网络教育学院专业本科生毕业论文开题情况表
目录 目录 (5) 摘要 (7) 第一章概述 (9) 1.1国城市轨道交通的发展 (9) 1.2轨道交通供电系统的重要性及其要求 (10) 1.2.1系统的总体功能 (10) 1.2.2系统的基本要求 (11) 1.3供电系统的构成 (12) 1.4 SCADA系统的角色和意义 (13) 1.5本设计的主要工作 (14) 第二章轨道交通供电系统介绍 (15) 2.1设备分类 (15) 2.2设备的功能和型式 (15) 2.2.1高压开关设备 (15) 2.2.2中压开关设备 (15) 2.2.3低压开关设备 (17) 2.2.4直流开关柜 (19) 2.2.5 微机保护装置 (19) 2.3本章小结 (21) 第三章 SCADA系统的设计 (22) 3.1概述 (22)
3.2一般要求 (22) 3.3系统构成 (23) 3.4监控对象 (25) 3.4.1 66~110KV设备 (25) 3.4.2主变压器 (26) 3.4.3 10~35KV设备 (26) 3.4.4直流750V或直流1500V设备 (28) 3.4.5 400V设备 (30) 3.4.6配电变压器 (31) 3.4.7交直流电源屏 (31) 3.4.8排流柜 (31) 3.4.9轨道电位限制装置 (31) 3.5技术指标 (32) 3.5.1控制中心主站系统技术指标 (32) 3.5.2变电所综合自动化系统技术指标 (32) 3.6中央监控系统 (33) 3.6.1中央监控系统的功能 (33) 3.6.2中央监控系统网络配置方案 (48) 3.6.3中央监控系统硬件配置方案 (50) 3.6.4系统软件配置方案 (51) 3.7供电复示系统 (51) 3.7.1系统功能 (51)
城市轨道交通运营管理专业论文 论新形势下新型轨道交通的发展和影响 在当今时代,由于经济的巨大的迅速发展,使得我们的交通方式也发生了重大的发展,而最最重要的是,由于在此背景之下,我们面对交通方式的快速更新和发展,已经重大的影响到了我们的日常生活和社会生产。而于此同时,正是由于这个的发展,我们也要采取更多的方式来面对正是由于这些交通方式的发展而带来的影响。 而由于经济的发展而带来的科技水平的提升,使得交通的方式,变得越来越多样化,特别是在此基础之上,交通也变得立体化,特别是从陆地交通,发展到海陆空三位一体的交通。虽然,有多种交通方式的发展,但是最为重要的是在此种背景之下,对人们影响最为重要的依然是陆地交通。而在陆地交通之中,对人影响最为重大的就是如标题所说的那样,轨道交通。而轨道交通的定义为“城市轨道交通(Rail Transit)是指具有运量大、速度快、安全、准点、保护环境、节约能源和用地等特点的交通方式,简称”轨交“,包括地铁、轻轨、快轨、有轨电车等。世界各国普遍认识到:解决城市的交通问题的根本出路在于优先发展以轨道交通为骨干的城市公共交通系统。” 其实,如定义所讲的那样,铁轨交通对人而言,并不是就只是简单的火车。正是由于经济的发展,而由于经济的发展使得交通方式能够得到发展。由最初的普通出行方式,而这里,要讲一下交通方式的一个发展历程。交通从最初的双脚出行,特别是最初的时候,特别是以19世纪80年代的卡尔本茨发明出内燃机之前。人们大多的出行方式一般以马车和步行为主。其实,在那个时候,也只能选择步行和马车,因为那个时候人们还没有懂得该如何利用除了人力和畜类力量之外的力量。而直到卡尔本茨发明出内燃机之后,人们迅速开始改变了出行方式的选择,或者说,是使人们改变了出行方式的选择思维。而在这之前,更为重要的是,但在当时却并没有显得更加重要的是,1804年发明的蒸汽机车,而其中一个的发明者就是瓦特。 正是由于那个时候发明的蒸汽机车,才会使得现在的我们有了城市轨道交通的学科。当然,轨道交通在当时并没有得到特别重视,因为都知道在那个时候,轨道交通能够成功的前提是有轨道,而在当时,架设轨道并没有现在的简单,现在的轨道无论是跨海,还是上西藏都能够实现。而在当时,或许跨个河都是显得困难异常的挑战。所以,正是由于这个原因,
单片机课程设计 题目智能小车的设计 学生姓名饶晓东 院(系)机械与电气工程学院 班级 10机械电子工程01班 学号 2010100548 指导老师于祯 完成日期 2013 年 5 月 31 日 南昌工程学院 课程设计(论文)任务书 I、课程设计(论文)题目: 智能小车的设计 II、课程设计(论文)使用的原始资料(数据)及设计技术要求: 通过Intel8253和1298N实现汽车的加速、减速、刹停,并可通过两个电
机的不同转速实现左转和右转等功能 III、课程设计(论文)工作内容及完成时间: 1、查阅资料,确定硬件系统框图组成。(5月20日~5月22日) 2、设计完整电原理图。(5月23日~5月25日) 3、设计软件结构流程框图。(5月26日~5月27日) 4、按流程编写各功能模块程序。(5月28日~5月29日) 5、完成课程设计报告(5月30日~5月31日) Ⅳ 主要参考资料: 1、张俊漠,单片机中级教程-原理与应用北京航空航天大学出版社2002 2、郭天祥,51单片机c语言教程 机械与电气系 10机械电子(本) 专业类 01班 学生:饶晓东 日期:自 2013 年 5 月20 日至 2013 年5 月31 日
指导教师:于祯 助理指导教师(并指出所负责的部分): 教研室主任 附注:任务书应该附在已完成的课程设计说明书首页。 摘要 智能作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。智能电动车就是其中的一个体现。本次设计的简易智能电动车,采用AT89C52单片机作为小车的检测和控制核心;在小车行驶的过程中能够根据不同的要求通过改变PWM 输出改变小车的行驶速度。本设计结构简单,较容易实现,但具有高度的智能化、人性化,一定程度体现了智能。 采用的技术主要有: 1、通过AT89C52自带的定时器设置PWM输出来控制小车的速度; 2、电机驱动芯片L298N控制两个直流电机的转向; 3、数码管显示测量数据
毕业设计(论文) (说明书) 题目: 姓名: 编号: 平顶山工业职业技术学院 年月日
平顶山工业职业技术学院 毕业设计(论文)任务书 姓名 专业汽车运用技术 任务下达日期年月日设计(论文)开始日期年月日设计(论文)完成日期年月日设计(论文)题目:中国汽车工业的发展趋势及对策 A·编制设计 B·设计专题(毕业论文) 指导教师 系(部)主任 __年__月__日
平顶山工业职业技术学院 毕业设计(论文)答辩委员会记录 机械工程系汽车运用技术专业,学生于年月日 进行了毕业设计(论文)答辩。 设计题目:中国汽车工业的发展趋势及对策 专题(论文)题目:中国汽车工业的发展趋势及对策 指导老师: 答辩委员会根据学生提交的毕业设计(论文)材料,根据学生答辩情况,经答辩委员会讨论评定,给予学生毕业设计(论文)成绩为。 答辩委员会人,出席人答辩委员会主任(签字): 答辩委员会副主任(签字): 答辩委员会委员:,,,,,
平顶山工业职业技术学院毕业设计(论文)评语 第页 共页学生姓名:专业汽车运用技术年级 09 级 毕业设计(论文)题目: 评阅人: 指导教师:(签字)年月日成绩: 系(科)主任:(签字)年月日毕业设计(论文)及答辩评语:
摘要 20世纪九十年代以来,中国以GDP近两位数的实际增长速度成为全球增长速度最快的国家之一。据国务院发展研究中心的研究报告,加入世界贸易组织以后,中国经济将有更多增长机会,但其各部分增长差异各有不同。入世后中国必须承担降低关税、开放服务领域、减少或取消限制外商投资某些行业的规定等义务。从现有的保护壁垒和行业全球化程度来看,中国的汽车行业将是受入世冲击最大的行业。 2002年中国汽车工业面对加入WTO 后的冲击,凭借巨大的、迅速发展的市场,低廉的劳动力,完整的、较强的制造业配套能力,较强的、较完备的技术开发体系,迅速发展。但是,中国汽车工业从整体上看,仍然是一个国际竞争力较弱的产业。中国汽车工业逐步从制造、研究开发、销售服务、汽车信贷等方面全面融入世界汽车工业体系。通过使自身全面融入世界汽车工业体系,中国汽车工业将获得更加迅速的发展,并且逐步成为世界汽车工业的主要制造基地。但由于中国汽车工业发展具有种种有利条件,中国汽车工业有可能最终成为具有独立开发能力、具有一定国际竞争力的产业。 关键字:中国,汽车工业,发展趋势,对策 Abstract Since the 1990s, China with the actual near double-digit GDP growth rate as a global economic growth is one of the fastest. According to the development research center of the state council research report, after joining theWTO, China's economy will have more growth opportunities, but the growth potential of its components are all have differences. After WTO entry China must assume reduced tariffs, open service field, reduce or eliminate restricted the provisions of foreign investment certain industries such obligations. From the existing barriers and industry globalization intensity, China's auto industry will be the biggest impact by WTO industry.
2018年铁路毕业论文题目174个 铁路专业主要包括高铁乘务、地铁运行、票务安检、铁路运输等方向,随着我国铁路产业的发展,铁路技术与服务不断提升,现已走出国门,在世界铁路上已占有一席之地,为了方便论文写作,本站整理了部分铁路毕业论文题目供参考。 1、铁路客运高峰期常态化运输组织方法分析 2、铁路站场设计对运输影响的探讨 3、钢铁企业铁路运输效率的分析与对策 4、铁路运输安全管理探讨 5、针对铁路煤炭高效运输的策略探讨 6、铁路运输安全监管体制探究实践 7、论我国铁路运输成本优化的改革思路 8、铁路运输调度安全管理探讨 9、现代铁路货物运输在物流发展中的策略研究 10、铁路调度运输组织效率探讨及对策 11、铁路货物运输产品形式及其组织形态研究 12、关于市场导向型铁路运输组织方式的思考 13、城市轨道交通乘务派班管理系统设计与实现 14、铁路物流运输组织管理创新的研究 15、铁路旅客运输需求分析与对策研究 16、企业铁路智能运输调度平台的关键流程 17、试论铁路运输调度系统升级改造 18、从95306网站看铁路运输向现代物流的转型 19、论我国铁路运输制度现象及改革 20、铁路列车乘务人员用餐及工作条件问题研究 21、关于铁路旅客运输晚点赔偿的问题研究 22、铁路运输领域内物联网的应用探析 23、铁路旅客安检系统现状及发展研究 24、基于铁路运输节能技术应用 25、铁路危险货物运输发展策略的思考 26、地铁列车运行自动控制系统设计 27、铁路煤炭运输存在的问题及对策探讨 28、铁路运输调度管理系统应用研究 29、铁路行包运输运能分配方案研究 30、铁路运输散堆装货物特性及分类 31、地铁列车追踪运行的节能控制与分析 32、城轨交通乘务任务配对的集合分割模型及算法 33、铁路运输效益管理现状研究 34、地铁运行过程中车门控制的安全性研究 35、地铁环境控制系统的运行管理 36、地铁供电系统日常运行要点 37、铁路客运乘务制度改革的实践与思考 38、地铁车辆正线运行客室噪声 39、关于对动车组乘务服务员收入分配规范化管理的思考 40、旅客列车乘务巡检系统的设计与实现
浅议城市轨道交通运营管理 容提要: 在概述国外主要城市的轨道交通运营管理现状的基础上, 针对我国城市轨道交通的实际, 提出我国城软交通的管理体制和运营管理与机制策略两大方面的建议。 关键词: 城市轨道交通警惕管理体制运营管理 作为一个现代化城市, 轨道交通已经不是可有可无的问题, 而 是必须具备的,当今, 有无城轨交通已经成为现代化城市的标志之一, 也已成为衡量国际化大都市的标志之一。进人21 世纪, 各国轨道交通发展势头迅猛。已经建成相当规模城轨交通的城市, 正在进一步完善 其系统, 一些国家和地方恢复了有轨电车, 如北美、欧洲旧本、澳大 利亚的一些城市; 一些认识不足或过晚的甚至走了弯路的国家和城市 重新审时度势, 纷纷作出了发展城轨交通的决策, 如泰国的曼谷、美 国的洛杉矶等城市; 已经从城轨发展中获得好处的国家, 又加大了建 设力度, 或扩大规模增加线路、或改进装备、或提高服务质量。总之, 进人21 世纪后, 随着国家十二五规划发展和国家的大力支持,我国 的城轨交通, 其中地铁、轻轨、市郊或城市铁路将得到迅猛发展。为 我们出行提供了诸多的便利。 一、世界主要城市城轨交通运营管理状况及存在问题 城轨交通的建设过程, 大致可以分为3 个阶段: 即线网规划与设 计阶段、实施与施工阶段、建成与运营管理阶段。当今世界城轨交通 运营管理中仍存在问题。 1、管理体制方面 世界各国各大城市轨道交通的管理体制形式多样, 但它们都与建设资 金来源有关, 即投资主体的不同, 就决定了采取不同的管理体制。英 国伦敦的国铁和地铁是通勤运输的主要工具其中市郊铁路由国铁管理, 其管理体制是国有国营性质, 地铁和公共汽车由地方运输公司经营。 法国巴黎轨道交通包括地铁、地区快速铁路(R E R )和市郊铁路, 其中R E R 由运输公司和国铁共同管理, 市郊铁路属于国铁, 其管理体制
城市轨道交通毕业论文 目录 绪论 (1) 第1章屏蔽门系统概述 (2) 1.1 屏蔽门系统定义 (2) 1.2 屏蔽门系统的类型 (2) 1.2.1 全封闭式屏蔽门 (2) 1.2.2 半封闭式屏蔽门 (2) 1.3 屏蔽门的构成和功能 (3) 1.3.1 门体结构 (3) 1.3.2 门机系统 (4) 1.3.3 供电电源 (5) 1.3.4 控制系统 (5) 第2章屏蔽门在国外的应用概况 (9) 2.1 屏蔽门在国的应用情况 (9) 2.2 屏蔽门在新加坡的发展情况 (10) 第3章屏蔽门的特点和运行模式及接口 (12) 3.1 屏蔽门的特点 (12) 3.1.1 屏蔽门的优点 (12) 3.1.2 屏蔽门的缺点 (15) 3.2 屏蔽门的运行模式 (16) 3.2.1正常运行模式(系统级控制) (18) 3.2.2非正常运行模式(站台级控制) (18) 3.2.3紧急运行模式(手动操作) (19) 3.3 屏蔽门系统与相关专业的接口 (19) 3.3.1屏蔽门系统与信号系统的接口容 (21) 3.3.2屏蔽门系统与综合监控系统的接口容 (22)
第4章屏蔽门系统的发展前景以及应用建议 (24) 4.1 屏蔽门系统的发展前景 (24) 4.1 屏蔽门系统的应用建议 (25) 参考文献 (26) 致谢 (27)
绪论 屏蔽门系统是上世纪80年代出现的应用在城市轨道交通中的一种安全装置。地铁屏蔽门系统是一个典型的机电一体化产品,其沿站台边缘布置,将车站站台与行车隧道区域隔离开,降低车站空调通风系统的运行能耗。同时减少了列车运行噪音和活塞风对车站的影响,防止人员跌落轨道产生意外事故,为乘客提供了舒适、安全的候车环境,提高了地铁的服务水平。在我国轨道交通建设中,地铁2号线是国首次引入屏蔽门系统,并在实际应用中取得了良好的经济、社会效益的地铁线路。目前已建成的地铁线路有些正在筹备加装屏蔽门(或安全门)系统(如一号线),新建线路多数设计采用屏蔽门(或安全门)系统。
智能小车设计报告 专业:电子信息工程技术 学生姓名:史响林周博超朱雄王昌指导教师:张力 完成日期:2014 年5 月24 日
目录 1 绪论 (3) 2 设计任务 (2) 2.1设计任务 (2) 3 设计方案 (3) 3.1任务分析 (3) 3.2方案框架 (3) 4 系统硬件设计 (4) 4.1核心芯片模块AT89S52 (4) 4.2电机驱动电路设计 (4) 4.3超声波测距设计 (6) 4.4传感器测速的设计 (8) 4.5LCD1602显示模块 (9) 5 系统软件设计 (8) 5.1程序设计流程图 (8) 5.2关键程序设计 (8)
6 心得体会 (13) 附录1 系统原理图 (15) 附录2 系统PCB图 ........................................................... 错误!未定义书签。附录 3 程序清单 (17) 1 论绪 智能作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。本设计主要体现多功能小车的智能模式,设计中的理论方案、分析方法及特色与创新点等可以为自动运输机器人、采矿勘探机器人、家用自动清洁机器人等自动半自动机器人的设计与普及有一定的参考意义。同时小车可以作为玩具的发展对象,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。超声波作为智能车避障的一种重要手段,
以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求,在未来汽车智能化进程中必将得到广泛应用。我国作为一个世界大国,在高科技领域也必须占据一席之地,未来汽车的智能化是汽车产业发展必然的,在这种情况下研究超声波在智能车避障上的应用具有深远意义,这将对我国未来智能汽车的研究在世界高科技领域占据领先地位具有重要作用。本智能小车系统最诱人的前景就是可用于未来的智能汽车上了,当驾驶员因疏忽或打瞌睡时这样的智能汽车的设计就能体现出它的作用。如果汽车偏离车道或距障碍物小于安全距离时,汽车就会发出警报,提醒驾驶员注意,如果驾驶员没有及时作出反应,汽车就会自动减速或停靠于路边。这样的小车还可以用于月球探测等的无人探月车,帮助我们传达月球上更多的信息,让我们更加的了解月球,为将来登月做好充分准备。这样的小车在科学考察探测车上也有广阔的应用前景,在科学考察中,有很多危险且人们无法涉足的地方,这时,智能科学考察车就能够派上用场,在它上面装上摄像机,代替人们进行许多无法进行的工作。 设计采用对比选择,模块独立,综合处理的研究方法。采用AT89S52单片机模块作为小车的检测和控制核心;通过翻阅大量的相关文献资料,分析整理出有关信息,在此基础上列出不同的解决方案,结合实际情况对比方案优劣选出最优方案进行设计。本次试验利用单片机模块上的按键来控制小车的速度,方向,及在车体上面装有超声波测距模块利用LCD1602显示屏来显示测出来具体距离。本设计结构简单,较容易实现,但具有高度的智能化、人性化,一定程度体现了智能。 通过调试检测各模块,得到正确的信号输出,实现其应有的功能。最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模