
院系:控制系 姓名:刘锋 学号:M201071802 指导老师:关治洪
一、PID 控制器的设计
1. PID 线性控制器至今在控制系统的应用中占有统治地位[3]。这是因为PID 控制器结构简
单,使用方便,控制对象面广,在理论上有成熟的稳定性设计和参数整定方法,在工程应用中积累了丰富的实践经验。
PID 参数的整定方法很多,主要有Ziegler-Nichols 整定法,临界比例度法,衰减曲线法。 首先通过实验获取控制对象的单位阶跃响应,得到响应曲线如下:
可以看到单位阶跃响应曲线看起来不是一条S 形的曲线,所以不能用Ziegler-Nichols 方法来整定参数[1]。
考虑用临界比例度法,由于临界比例法要求系统的阶数是三阶或者三阶以上,所以不可以使用临界比例度法。 下面考虑衰减曲线法
用Simulink 搭建系统仿真图如下:
图2 断开积分微分后的阶跃响应
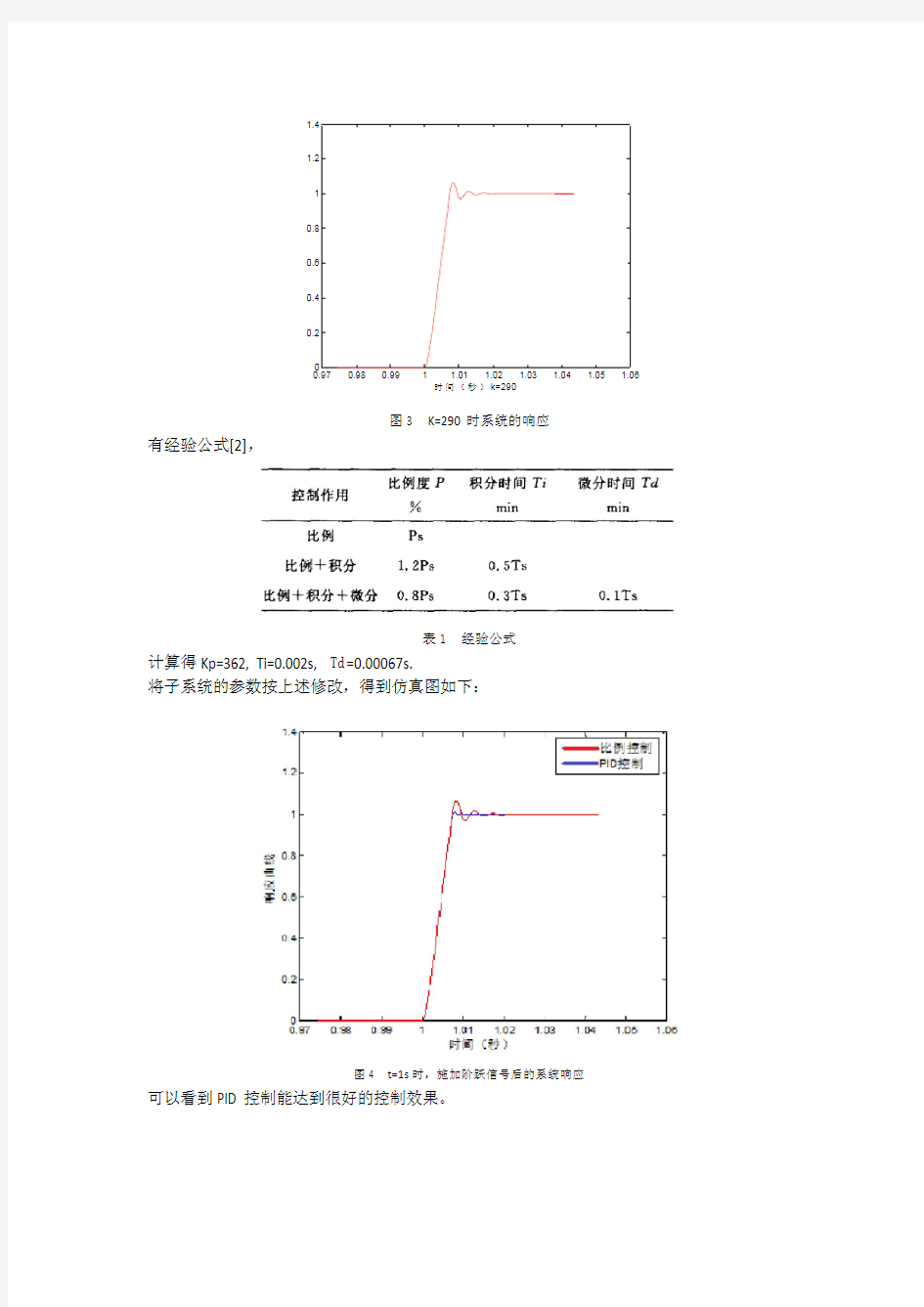
逐渐增大比例增益K ,观察示波器,直到响应系统的第一次超调量和第二次超调量之比为4:1时,记下此时的增益K 值,可以得到K=290时,比例度大约为4:1,此时比例度Ps =0.00345,T s =0.0067s.
图3 K=290时系统的响应
有经验公式[2],
表1 经验公式
计算得Kp=362, Ti=0.002s, Td =0.00067s.
将子系统的参数按上述修改,得到仿真图如下:
图4 t=1s 时,施加阶跃信号后的系统响应
可以看到PID 控制能达到很好的控制效果。
系统的整体框图设计如下:
图5 系统的整体框图
其中子系统设计如下
图6 子系统框图
t=0时刻起施加给定R=20,t=1s时刻起施加负载扰动LOAD=5得到系统的响应曲线如下:
图7 系统响应
可以看到用PID设计的控制器使系统响应速度较快,具有一定的抗负载扰动能力,最终得到的输出误差在2%之内。但是系统最终有微小的扰动,为了消除这种扰动,我们可以采取使PID微分环节含有死区,这样使微分项对于小信号不太敏感,以消除这种微小的扰动对控制器输出的影响。
图8 加死区后的子系统框图
系统性能指标分析:
1)
图9 J=0.08时的系统响应
图9 J=0.02时的系统响应
结论,所设计的PID抗参数变化能力较好。
2)动态性能
当J=0.05时,上升时间t r=0.050s,调节时间0.045(按5%计算),超调量为б=0.5%. 3)稳态误差
由于积分作用的存在,稳态误差为零。
综上,设计的PID控制器抗参数变化能力,抗扰动能力,动态过程,稳态过程均较好。
参考文献
[1]王正林,王开胜,陈顺国,王琪. MATLAB/Simulink与控制系统仿真(第二版). 北京:电
子工业出版社,2011(1),223-224.
[2]戴雅馨. 浅谈PID参数整定方法. 纯碱工业,2009(6),15-18.
[3]曾光奇,胡军安等. 模糊控制理论与工程应用. 武汉:华中科技大学出版社,2006(8), 102.
二、 基于Mamdani 型模糊控制器的设计
1) 简介
1965年美国加利福尼亚大学计算机系自动控制专家扎德(LA Zadeh)教授发表了《模糊集合》一文, 首次提出用“隶属函数”概念来定量描述事物模糊性的模糊集合理论, 从而奠定了模糊数学的基础.模糊数学可用来描述客观事物中的模糊概念, 人们用模糊数学的知识模仿人脑的思维方法, 对模糊现象进行识别和判决, 给出精确的控制量, 实现对被控对象的控制, 这种方法称为模糊控制. 模糊控制与经典控制和现代控制相比, 主要优点是它不需要建立精确的数学模型, 因此, 对一些无法建立数学模型或难以建立精确数学模型的被控对象, 采用模糊控制方法, 往往能获得较满意的控制效果. 目前, 模糊控制理论及模糊控制系统的应用发展很快, 模糊控制已成为智能控制的重要组成部分.模糊控制是一种从宏观行为上调控系统相应关系的控制策略, 其关键在于用语言描述的控制规则, 通常用 “IF …THEN …” 的方式来表达实际控制过程中专家的知识和经验. 为实现对工业过程的实时控制, 设计者往往采用离线方式进行模糊控制器的设计, 即对输入确切量模糊化, 再进行模糊合成运算, 最后进行模糊判决才能得到确切的控制量,并以控制表(查询表)形式存入计算机. 整个模糊控制系统的框图如下:
图1 整体系统框图
系统的框图和PID 控制器下的是一样的。差别在于控制器(图示子系统)的设计是不同的。模糊控制器的原理图如下[2]:
图2 模糊控制器的原理图
2) 模糊控制器的设计
模糊控制器的设计大体可分为5个步骤: a . 确定输入输出变量,选取系统的被控输出和给定输入之间的误差E 以及误差的变化率CE
作为系统的两个输入语言变量,选取控制器输出量U作为系统的输出语言变量。分别选取误差E、误差变化率CE以及输出量U的论域分别为:
E= {-1, -2/3, -1/3, 0, 1/3, 2/3, 1}
CE= {-1, -2/3, -1/3, 0, 1/3, 2/3, 1}
U= {-1, -2/3, -1/3, 0, 1/3, 2/3, 1}
E, CE和U的语言值分别选为
E= {NB, NM, NS, ZE, PS, PM, PB}
CE= {NB, NM, NS, ZE, PS, PM, PB}
U= {NB, NM, NS, ZE, PS, PM, PB}
b.确定控制参数以及赋值表选取分布函数trimf, 按照分布函数按分布函数可确定NB~PB子集的隶属函数μ(x), 并构成语言变量E,CE和U的赋值表。由于它们的赋值表是类似的,
这里仅给出误差E的赋值表。E赋值表见下图。
图3 E的赋值分布函数图
选取的控制输出解模糊方法为centroid(重心法).
c.总结专家经验,如“误差偏高(输出没有达到给定),并且有变大的趋势,应该增大输出”等,可建立控制系统控制规则的Fuzzy控制规则表(表1)
表1 模糊控制规则表
在matlab
图4 控制规则三维图
d.输入量化因子以及输出的比例因子的确定
在第一步中,我们将输入输出的论域都定-1到1之间,而未经量化的基本论域的范围取为[-20, 20], 所以要经过论域变化,选取量化因子k1=1/20=0.05. 为了保证系统响应的速度选取CE的基本论域为[-0.33, 0.33],则量化因子k2=1/0.33=3. 输出U的基本论域为[-20,20], 比例因子k3=20/1=20.
e.其他方面
由于现实中模糊控制器的实现一般要依靠计算机来完成,因此要对输入信号进行采样离散化,采用周期为0.001s的时钟脉冲和上升沿触发进行信号采样得到离散信号送入模糊控制器。
考虑执行机构是具有记忆特性的装置,例如步进电机等。加入一个离散时间域积分器对模糊控制器(Subsystem部分)的输出信号做保持。即采用增量式输出方式,这种控制器输出方式的优点还在于,若由于某种不可预料的原因,例如计算机故障死机,使得控制作用的增量为0时,执行部分仍保持着原有的动作位置,从而对整个系统不造成太大影响。
为了保证经量化后的E与CE在[-1,1]之间,在量化因子后面加上了饱和函数。同时选取离散积分器的增益为1000,来抵消离散积分器对增益的影响
综上,设计的模糊控制器的子系统如图所示,其中K1, K2, K3 的取值由步骤(d)给出。
图5 模糊控制器的子系统
3)仿真
a.在t=0时,加入幅值为20的阶跃信号,t=1s时加上幅值为5的干扰信号。用matlab仿
真得到仿真图像如下:
图6 J=0.05时的系统响应图b.考察对参数变化的适应能力
图7 J=0.08时的系统响应图
图8 J=0.02时的系统响应图
可以看到,当J=0.08时,系统的超调量比较大,当J=0.02时,系统的响应曲线中的超调非常大,对系统造成不利的影响。所以所设计的模糊控制器对于参数的适应能力非常差。c.系统的响应的分析
当J=0.05时
动态性能:上升时间t r=0.14s, 调节时间t s=0.15s, 超调量б=7.5%.
静态性能:稳态误差为零。说明系统具有一定的抗干扰能力。
4)比例因子的调节原则
当E或者CE过大时,重点考虑系统的响应问题,k1,k2应该取小值,降低对E和CE的分辨率,同时k3取较大值,使响应加快保证系统的快速性与稳定性;但是当E和CE 较小时,k1,k2需要取较大的值,增加对E和CE的分辨率;同时k3减小,使系统尽快进入稳态精度范围。
如果系统要求无超调,可以通过调节比例因子来实现对控制性能的调节,经过试凑,可以其中取K1=0.5, K2=8, K3=5.(无超调,ts=0.13s)
5)结论
基于mamdani模糊逻辑设计的模糊控制器,具有抗外界干扰的能力,具有一定的鲁棒性,动态性能也较佳,但是抗参数变化的能力较差,主要原因在于比例因子的是固定的,不能同时保证系统的快速性与精度上的要求,只能权衡这一矛盾,选择相对合理的比例因子。
[1]邵桂荣. 基于Matlab的模糊控制系统的设计与仿真. 重庆工学院学报(自然科学版).
2007(5), 51-54.
[2]徐玲. 模糊控制在智能温室温湿度控制中的应用. 东北林业大学硕士论文. 2006(5), 11
三、T-S型模糊控制器设计
Mamdani模糊系统和TS模糊系统的主要区别在于模糊规则的后半句,前者利用模糊集合而后者利用输入变量的线性函数[1], 几乎所有的非线性系统都可以用Takagi-Sugeno模糊模型来表示. 实际上,已经证明T-S型模糊模型可以逼近任意非线性系统[2,3].
1)T-S型模糊控制器设计和第二部分中Mamdani模糊控制器的设计类似,下面简单的介绍
T-S模糊控制器的设计过程。
模糊控制器的设计大体可分为5个步骤:
a.确定输入输出变量,选取系统的被控输出和给定输入之间的误差E以及误差的变化率CE 作为系统的两个输入语言变量,选取控制器输出量U作为系统的输出语言变量。分别选取误差E、误差变化率CE论域分别为:
E= {-1, -2/3, -1/3, 0, 1/3, 2/3, 1}
CE= {-1, -2/3, -1/3, 0, 1/3, 2/3, 1}
E和CE的语言值分别选为
E= {NB, NM, NS, ZE, PS, PM, PB}
CE= {NB, NM, NS, ZE, PS, PM, PB}
b. 确定控制参数以及赋值表选取分布函数trimf, 按照分布函数按分布函数可确定NB~PB子集的隶属函数μ(x), 并构成语言变量E和CE赋值表。由于E, CE的赋值表是类似的,这里仅给出误差E的赋值表。E赋值表见下图。
图1 E赋值图
c. 选取的控制输出解模糊方法为wtaver.
总结专家经验,如“误差偏高(输出没有达到给定),并且有变大的趋势,应该增大输出”
等,可建立控制系统控制规则的Fuzzy控制规则表(表1)
表1 模糊控制规则表
其中,将u
在matlab中输入各规则后得到的控制规则三维图如图所示
图2 控制规则三维图
d.输入量化因子以及输出的比例因子的确定
根据第二部分的经验,选取量化因子k1=0.2. 为了保证系统响应的速度选取CE的基本论域k2=8, 由于该T-S模糊控制器的输出为[0,1], 需要对输出加入一个-0.5的偏置,使输出的范围变为[-0.5,0.5], 所以这里选取的k3应该是第二部分k3的2倍,所以k3=40.
e.其他方面
由于现实中模糊控制器的实现一般要依靠计算机来完成,因此要对输入信号进行采样离散化,采用周期为0.001s的时钟脉冲和上升沿触发进行信号采样得到离散信号送入模糊控制器。同时选取离散积分器的增益为1000,来抵消离散积分器对增益的影响。
考虑执行机构是具有记忆特性的装置,例如步进电机等。加入一个离散时间域积分器对模糊控制器(Subsystem部分)的输出信号做保持。即采用增量式输出方式,这种控制器输出方式的优点还在于,若由于某种不可预料的原因,例如计算机故障死机,使得控制作用的增量为0时,执行部分仍保持着原有的动作位置,从而对整个系统不造成太大影响。
为了保证经量化后的E与CE在[-1,1]之间,在量化因子后面加上了饱和函数。
2)仿真
图3 J=0.05的响应计算得ts=0.18s.
图4 J=0.08的响应计算可得tr=0.242,ts=0.288,tau=1.4%.
3). 结论
性能分析:
J=0.05时,系统的调节时间为ts=0.18s,无超调,无稳态误差。
按照第二部分凑试所得的参数,采用同样的模糊规则,可以达到类似mamdani型模糊控制器的结果,对与参数变化具有鲁棒性,并且具有抗扰动能力,无静态误差。
从仿真结果看来,该部分的响应比起第二部分来说比较理想,原因在于利用了第二部分最后凑试出来的量化因子。我曾经试过利用第二部分计算出来的量化因子来构造T-S型模糊控制器,效果和第二部分差不多,且在这里重复毫无意义,从而直接使用凑试出来的结果,得到了较为理想的图形,这也从侧面反映了模糊控制中的专家经验是很重要的。
参考文献
[1] T. Takagi, M. Sugeno. Fuzzy indentification of systems and its applications to modeling and control, IEEE Transactions on Systems, Man and Cybernetics 15(1985) 116-132.
[2] C. Fantuzzi and R. Rovatti. On the approximation capabilities of the homogeneous
Takagi-Sugeno model, Proceedings of the Fifth IEEE International Conference on, vol. 2, 1996. [3] J. Buckley, Universal fuzzy controllers, Automatica (Journal of IFAC), vol. 28, no. 6, 1992.
1245-1248.
四、自适应模糊控制器的设计
1). 简介[1]
模糊控制是一种无需建模、方便易懂、执行简单、开发成本低廉的非线性控制技术。正是由于这些优点,模糊控制在各种商业产品和工业过程中得到了成功的应用。当控制对象数学模型在大范围内变化时,自适应控制可使系统仍能自动地工作于最优或者接近最优的运行状态。自适应模糊控制理论是模糊控制理论相互交叉、相互渗透形成的一个研究领域。
模糊控制器一般在被控对象的参数和结构存在很大的不确定性因素或者未知时采用。一般来讲,自适应控制的目的就是在系统出现这些不确定因素时,仍使系统保持既定特征。因此,先进的模糊控制器应该具有自适应性。
自适应模糊控制系统是指具有学习算法的模糊逻辑系统。这里的模糊逻辑系统是由服从模糊逻辑规则的一系列“IF…THEN…”规则构造的。而学习算法则依靠数据信息来对模糊逻辑系统的参数进行调整。自适应模糊控制系统被认为是能通过学习自动产生其模糊规则的模糊控制系统。
2). 基本原理
量化因子的调节在[2]得到了详细的论述,调节的基本原则如第二部分所述。当e或者ce较大时,重点考虑系统响应问题。Ke和kc取较小值,降低e和ce的分辨率,同时ku取较大值,使响应加快。保证系统的快速性与稳定性。当e或者ce较小时,ke和kc取较大值。增加对e和ce的分辨率,同时,ku减小,避免产生超调,并使系统尽快进入稳态精度范围。第二部分凑试得到的参数K1=0.5, K2=8, K3=5. 可以看到它的响应速度比较慢。按照上述思想,我们选择自适应律来构建模糊自适应控制器,来提高系统的响应性能。
首先,观察CE和E的取值变化范围,得到如下图所示。
图1 CE和E的取值变化范围
为了提高系统的响应速度,应该在保证稳定性和精度的基础上提高系统的响应速度,所以考虑设计模糊自适应控制器,当误差信号较大时,使控制器以最大值输出,达到准时间最优。误差信号变小时,调整到原来的参数,以保证系统的精度以及抗干扰能力。
3). 模糊自适应控制器的设计
基于2)的论述,设计控制器如图2, 与第二部分设计的控制器唯一的差别就在于比例因子可调。
图2 子系统结构图
其中subsystem封装了一个S-function,基于经验,在这里我仅仅设计了三条规则,该函数如下定义:
function[sys,x0]=sreg(t,x,u,flag)
switch flag,
case 0,
sys=[0,0,3,2,0,1];
x0=[];
case 3,
if abs(u(1))>3
sys(1)=1.5;
sys(2)=1.5;
sys(3)=3;
else if abs(u(1))>1.5|abs(u(2))>0.05
sys(1)=1.2;
sys(2)=1;
sys(3)=1.2;
else
sys(1)=1;
sys(2)=1;
sys(3)=0.8;
end
end
end
end
基本的思想就是当误差大于3时,使三个量化因子都增大,可以看到在系统上升时间之内,控制器的输出时满量程的,如图3
当误差信号较小时,适当的减小输出量,以防止系统的出现过大的超调,反而增大了系统的调整时间。
4). 系统性能的分析
当J=0.05时,在t=0s时加入幅值为20的阶跃输入,t=1s时加上幅值为5的干扰信号。系统
可以看到,当J=0.05时,调整时间ts=0.12s,无超调,无静差。性能好于第二部分的模糊控制器。
下面考察系统的抗参数变化能力,当J=0.08时,系统响应如下图所示:
图5 J=0.08时,系统响应图
当J=0.02时,系统响应如图6所示
图6 J=0.02时,系统响应图
5). 结论
对比mamdani控制器可以看到,所设计的自适应控制器响应速度更快,而且无超调,到达了比较满意的系统响应性能。而且具有较好的抗干扰能力,干扰产生后,系统的恢复时间比较短。具有一定的抗参数变化能力,但是抗参数变化的能力不强,需要进一步设计封装函数的算法,由于时间和能力的限制,这里基于对模糊控制规则的理解,同时基于自己对控制系统控制规律的理解,仅设计了三条规则,但也达到了较为理想的效果。可以肯定的是,可以
设计更多的控制规则(但这要基于更多的专家经验以及更多的时间来调试)能设计出更加理想的控制器。也可以不同原理的自适应控制器,可以有模型参考的自适应控制器,变模糊规则自适应控制器,自适应PID控制器。
本作业最大的不足在于没有证明模糊控制系统的稳定性,关于稳定性的证明见文献[3-5]
参考文献
[1]曾光奇,胡军安等. 模糊控制理论与工程应用. 武汉:华中科技大学出版社,2006(8), 133.
[2]Tanaka, K., & Sano, M. A new tuning method of fuzzy controllers. Proceedings of IFAC. 1991,
207–210.
[3]H. X. Li, H. B. Gatland, and A. W. Green. Fuzzy Variable Structure Control. IEEE RANSACTIONS
ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 27, NO. 2, APRIL 1997.
306-313.
[4]Teo Lian Seng, Marzuki Bin Khalid, Rubiyah Yusof. Tuning of a Neuro-Fuzzy Controller by
Genetic Algorithm. IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 29, NO. 2, APRIL 1999.226-236.
[5]马秀莉,刘有军, 刘博. 带双输入的T—S离散模糊系统的稳定性分析. 山西大同大学学
报( 自然科学版) . 2010(4), Vol 26, NO.2, 11-12.
五、以上控制器的控制性能的比较
通过上面对输出波形的分析,并将几种控制器比较一下(J=0.05),得到的结论如下所示:
控制器离散PID MAMDANI T-S 自适应模糊超调量很小无无无调节时间最短较长较长很短稳态误差无无无无
抗负载扰动能力最强较强较强很强
对参数变化适应能力最强一般一般较强
由上面的表格比较可得到以下结论:
1.PID是最经典的控制器,也得到了充分的研究,如果允许有超调的情况下,
控制性能最佳。
2.当系统参数变化很剧烈,对控制器适应参数的能力要求较高时,首选离散PID
控制器.通过合理设计PID可以消除稳态误差。
3.不含有自适应能力的模糊控制器控制性能一般,最好加上自适应的学习算法。
4.mamdani和T-S模糊控制器功能类似,可以相互参照使用。
5.自适应模糊控制器各方面的性能都比较优秀,可以广泛应用。难度在于自适
应算法的设计上。理论上证明稳定性的方法也比较有限,一般常用的是Lyapunov泛函,期待有新的证明稳定性方法的突破性进展。
第30卷第3期2 0 1 1年9月计 算 技 术 与 自 动 化ComutinTechnoloandAutomationVol.30,No.3 Sep .2 0 1 1收稿日期:2011-05-17 作者简介:黄祥源(1974—),男,江苏盐城人,硕士研究生,研究方向:自动控制(E-mail:hxy @czili.edu.cn)。文章编号:1003-6199(2011)03-0056-06 恒压供水模糊自适应PID控制器的设计、 仿真黄祥源 (常州轻工职业技术学院,江苏常州 213164 ) 摘 要: 对遗传算法和传统PID控制作简要的介绍,针对工程整定方法整定的初始值超调量较大,调节时间较长的问题,利用遗传算法对其初值进行整定。利用遗传算法整定出的一组性能较优良的PID初值,结合模糊控制的思想,利用专家系统直接建立模糊规则,进行模糊自适应PID控制器的初步设计,并对恒压供水系统进行仿真,仿真结果满足设计要求。 关键词:模糊控制;PID控制器;恒压供水;Matlab中图分类号:TP312 文献标识码:A Design to Adaptive Fuzzy PID Controller for Constant-pressure Water SupplyHUANG Xiang-y uan(Changzhou Institute of Light Industry Technology,changzhou 213164,china) Abstract:This paper gave a brief introduction for the traditional PID control and genetic algorithms.For the larger o-vershoot of tuning initial solution and longer adjustment time from engineering neaten method,the initial values were set byuse of genetic algorithm.The paper set up the fuzzy rules directly and made the preliminary design to the adaptive fuzzy PIDcontroller,and simulated the constant-pressure water supply system according to fuzzy control theory,by a set of good ini-tial PID values from g enetic algorithms,and expert system.Key words:fuzzy control;PID controller;Constant-pressure water supply;matlab1 引 言 目前恒压供水技术在农业、工业和民用供水系统中已广泛使用,由于系统的负荷变化的不确定性,采用传统的PID算法实现压力控制的动态特性指标很难收到理想的效果。在大多数恒压供水系统中采用传统意义的PID调节器,系统的动态特性指标总是不稳定,通过实际应用中的对比发现应用模糊控制理论形成的控制方案在恒压供水系统中有较好的效果。本方案在常规PID控制器基础上引入模糊控制器,实现被控制对象参数变化在一定范围内模糊PID控制,使恒压供水系统动态静态性能指标保持最优。 2 模糊控制的结构与原理 模糊控制系统是以模糊集理论,模糊语言变量和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统,它从行为上模仿人的模糊推理和决策过程,它的组成核心 是具有智能性的模糊控制器[ 1] 。模糊逻辑控制的实质是利用模糊逻辑建立一种“自由模型”的非线性控制算法,在那些采用传统定量技术分析过程过于复杂的过程,或者提供的信息是定性的、非精确的、非确定的系统中,其控制效果是相当明显的。 模糊控制的基本原理框图如图1所示[ 3] 。它的核心部分为模糊控制器,如图1中点划线框中所 示,模糊控制器的控制规律由计算机的程序实现。
《智能控制技术》平时作业题 2016年4月1日 学号______________ 姓名 题一: 设被控对象的传递函数为 21()1000441) G s s s =++ (1)针对阶跃输入()5/R s s =,设计模糊监督PID 控制系统,使 得系统输出的超调量2%δ≤,进行系统仿真。 (2)已知条件和性能指标同(1),设计模糊监督模糊控制系统,进行系统仿真,同(1)的仿真结果进行比较。 题二:设被控对象的传递函数为 p 22p p p ()2K G s s s ζωω=++ 式中,P 1K =,P 0.707ζ=,P 1ω=。参考模型为一阶系统 r r ()K M s s a =+,r 1K =,r 1a =。系统参考输入为()sin(0.6)r t t =。 (1)针对()G s 设计一个直接模糊控制器(非自适应),使得对 象的输出尽可能接近参考模型的性能指标。模糊控制器为二维模 糊控制器,其输入变量为偏差e r y =-,r 为系统参考输入,y 为被控对象输出;偏差变化()()()e kT e kT T e kT T --= (用一阶后向差分近似)。 (2)针对()G s 设计模糊模型参考学习自适应控制系统,使得对
象输出跟踪参考模型输出并尽可能地靠近它。将(1)中所设计的模糊控制器作为初始模糊控制器并为FMRLC(模糊模型参考学习控制)所调整,进行系统仿真。 题三:使用模糊逻辑工具箱建立以下模糊推理系统。 (1)单输入单输出模糊推理系统:输入、输出变量分别为e和u,其模糊集论域均为[-1,1],语言变量取值[N,ZO,P],隶属函数为对称三角形,规则为 If e is N Then u is N If e is ZO Then u is ZO If e is P Then u is P 画出该模糊推理系统输入输出关系曲线。 (2)两输入一输出模糊推理系统:输入变量e和e ,输出变量为u,其模糊集论域均为[-6,6],语言变量取值[NL,NS,ZO,PS,PL],隶属函数为对称三角形;规则前件及蕴涵均采用“取小”运算。设计25条控制规则;求出该推理系统的控制面。(3)采用高斯形隶属函数,重复上述(2)。 题四:已知某被控对象的传递函数为 2.5 () (101) G s s s = +。 (1)采用二维PD模糊控制器,输入变量e和e ,输出变量为u,其模糊集论域均为[-6,6],语言变量取值[NL,NM,NS,ZO,PS,PM,PL],隶属函数为对称三角形;规则前件及蕴涵均采用“取小”运算,采用COG反模糊化方法。用Simulink建立单位
实验三模糊自适应整定PID控制仿真实验 一、实验目的 1.通过实验了解数字PID控制的原理 2.通过实验实现离散系统的数字 PID 控制仿真 3.通过实验了解模糊自适应整定PID控制的原理 4.通过实验实现模糊自适应整定PID控制仿真 5.通过实验进一步熟悉并掌握Matlab软件的使用方法 二、实验内容 1.针对给定离散系统的输入信号的位置响应,设计离散PID控制器,编制相应的仿真程序。2.若采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0 的干扰,编制该模糊自适应整定PID系统的Matlab仿真程序 三、实验步骤 1.针对给定离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器,编制相应的仿真程序。 2.确定模糊自整定PID的算法基础 3.针对 kp, ki , kd 三个参数分别建立合适的模糊规则表 4.画出PID参数的在线自校正工作程序流程图 5.编制该模糊自适应整定PID系统的Matlab仿真程序 四、实验要求 1.设被控对象为: 采样时间为1ms,采用Z变换进行离散化,经过Z变换后的离散化对象为: yout(k)=-den(2)yout(k-1)-den(3)yout(k-2)-den(4)yout(k-3)+num(2)u(k-1) +num(3)u(k-2)+num(4)u(k-3) 针对离散系统的阶跃信号、正弦信号和方波信号的位置响应,设计离散PID控制器。其中,S为 信号选择变量,S=1时为阶跃跟踪,S=2时为方波跟踪,S=3时为正弦跟踪。 2.采样时间为1ms ,采用模糊PID控制进行阶跃响应,在第300个采样时间时控制器输出加1.0的干扰,编制炉温模糊控制系统的Matlab仿真程序 五﹑自适应模糊控制的规则 1﹑控制规则:
神经网络自适应控制 学院:电气工程与自动化学院 专业:控制科学与工程 姓名:兰利亚 学号: 1430041009 日期: 2015年6月25日
神经网络间接自适应控制 摘要:自适应模糊控制系统对参数变化和环境变化不敏感,能用于非线性和多变 量复杂对象,不仅收敛速度快,鲁棒性好,而且可以在运行中不断修正自己的控制 规则来改善控制性能,因而受到广泛重视。间接自适应控制是通过在线辨识的到 控制对象的模型。神经网络作为自适应控制器,具有逼近任意函数的能力。 关键词:神经网络间接自适应控制系统辨识 一、引言 自适应控制系统必须完成测量性能函数、辨识对象的动态模型、决定控制 器如何修改以及如何改变控制器的可调参数等功能。自适应控制有两种形式: 一种是直接自适应控制,另一种是间接自适应控制。直接自适应控制是根据实 际系统性能与理想性能之间的偏差,通过一定的方法来直接调整控制器的参 数。 二、间接自适应系统分析与建模 2.1系统的分析 系统过程动态方程:y(k+1)= -0.8y(k)/(1+y2(k))+u(k),参考系统模型 由三阶差分方程描述: ym(k+1)=0.8ym(k)+1.2ym(k-1)+0.2ym(k-2)+r(k) 式中,r(k)是一个有界的参考输入。如果输出误差ec(k)定义为 ec(k)=y(k)-ym(k),则控制的目的就是确定一个有界的控制输入u(k),当k趋于 正无穷时,ec(k)=0.那么在k阶段,u(k)可以从y(k)和它的过去值中计算得 到: u(k)=0.8y(k)/(1+y2(k))+0.8y(k)+1.2y(k-1)+0.2y(k-2)+r(k) (1) 于是所造成的误差方程为: ec(k+1)=0.8ec(k)+1.2ec(k-1)+0.2ec(k-2) (2) 因为参考模型是渐进稳定的,所以对任意的初始条件,它服从当k趋于无穷, ec(k)=0。在任何时刻k,用神经元网络N2计算过程的输入控制,即 u(k)=-N[y(k)]+0.8y(k)+1.2y(k-1)+0.2y(k-2)+r(k) (3) 由此产生非线性差分方程:y(k+1)=-0.8y(k)/(1+y2(k))+N[y(k)] +0.8y(k)+ 1.2y(k-1)+0.2y(k-2)+r(k) (4) 故设计的要点是设计一个神经网络来逼近0.8y(k)/(1+y2(k))。 2.2系统的建模设计过程 第一步,用BP神经网络逼近,神经网络的结构包含三层:输入层、隐含层 和输出层。BP网络的训练过程如下:正向传播是输入信号从输入层经隐层传向 输出层,若输出层得到了期望的输出,则学习算法结束;否则,转至反向传 播。 第二步,输入测试样本,对神经网络的逼近程度进行测试,将测试后的期
84 |电气时代 2005年第4期 EA 应用与方案工业控制 k i =k i '+{ei , eci }i k d =k d '+{ei , eci }d 在线运行过程中, 控制系统通过对模糊逻辑规则的结果处理、查表和运算, 完成对PID参数的在线自校正。 用在线整定的PID参数 k p , k i 和 k d 就可以根据下列PID控制算法的离散差分公式计算出控制量 u : 位置式 u k =k p E k +k i E k +k d (E k -E k-1 增量式Δ u k =k p (E k -E k-1+ k i E k +K d (E k -2E k-1+E k-2 根据系统在受控过程中对应不同的|e |和|ec |, 将 PID参数的整定原则归纳如下 : 1当|e |较大时, 取较大的 k P 与较小的 k d , 使系统具有 较好的跟踪性能, 同时为避免出现较大的超调, 应对积分作用加以限制, 通常取k i =0。 2当|e |处于中等大小时, 为使系统响应超调较小, k P 应取较小些。该情况下, k d 的取值对系统响应影响较大, k i 的取值要适当。 3当|e |较小时, 为使系统具有较好的稳定性, k p 与 k i 均应取大些, 同时为避免系统在设定值附近出现振荡, k d 值的选择根据|ec |值较大时, k d 取较小值, 通常 k d 为中等大小。 控制器的设计及仿真试验 (1要求 设被控对象为三阶系统
采样时间为4ms, 分别采用参数模糊自整定PID控制和常规PID控制进行阶跃响应, 在第250个采样时刻控制器输出加1.0的干扰, 比较仿真结果。 (2模糊控制器设计 输入为偏差 e 和偏差变化率 ec , 输出变量为PID的三个参 在 工业生产过程中, 许多被控对象随着负荷变化或干扰因素的影响, 其对象的特性参数或结构发生改变。自 适应控制运用现代控制理论在线辨识对象特征参数, 实时改变其控制策略, 使控制系统品质指标保持在最佳范围内, 但其控制效果的好坏取决于辨识模型的精确度, 这对于复杂系统是非常困难的。因此, 在工业生产过程中, 大量采用的仍然是PID算法, PID参数的整定方法很多, 但大多数都以对象特性为基础。 参数模糊自整定PID控制原理 参数模糊自整定PID控制器结构如图1所示。 其原理是先找出PID的3个参数与偏差 e 和偏差变化率 ec 之间的模糊关系, 在运行中通过实时检测 e 和 ec , 再根据模糊控制原理来对3个参数进行在线修改, 以满足在不同 e 和 ec 时对控制参数的不同要求, 使被控对象具有良好的动、静态性能, 而且计算量小, 易于用单片机实现。 PID参数的整定必须考虑到在不同时刻三个参数的作用以及相互之间的互联关系。模糊控制器设计的核心是总结工程设计人员的技术知识和实际操作经验, 建立合适的模糊规则表, 得到针对 k p , k i , k d 三个参数分别整定的模糊控制表。再根据各模糊子集的隶属度赋值表和各参数模糊控制模型, 应用模糊合成推理设计PID参数的模糊矩阵表, 查出修正参数代入下式计算 k p =k p '+{ei , eci }p
模糊逻辑在控制领域的应用综述 摘要:本文介绍了模糊逻辑控制在工程应用中存在的一些问题,包括模糊控 制规则和参数优化问题、强耦合多变量问题和模糊控制稳态精度问题,另外介绍了在控制领域各方面的应用,比如:自适应模糊控制,模糊滑膜控制,基于Takagi-Sugeno(T-S)模型的控制,三维模糊控制。 关键字:模糊逻辑控制;问题;自适应模糊控制;模糊滑膜控制;基于Takagi-Sugeno(T-S)模型的控制;三维模糊控制 1引言 在现代工业控制领域,伴随着计算机技术的突飞猛进,出现了智能控制的新趋势,即以机器模拟人类思维模式,采用推理、演绎和归纳等手段,进行生产控制,这就是人工智能。模糊逻辑属于计算数学的范畴,包含有遗传算法,混沌理论及线性理论等内容,它综合了操作人员的实践经验,具有设计简单,易于应用、抗干扰能力强、反应速度快、便于控制和自适应能力强等优点。近年来,在过程控制、农业生产和军事科学等领域得到了广泛应用。[1] 2模糊逻辑在应用中的问题 2.1模糊控制规则和参数优化问题 对于复杂的工业控制过程,专家经验知识匮乏且逻辑推理困难,导致模糊控制规则的获取比较困难,难以总结出比较完善的模糊规则,在控制对象的参数发生变化时,严重影响模糊控制系统的效果,在某种意义上模糊控制系统的控制品质和性能与模糊规则的优劣有直接关系,因此优化模糊控制规则就变得尤其重要。 2.2强耦合多变量问题 多变量控制系统是目前过程控制中常见的控制对象,其不同于单变量控制系统。多变量控制系统中控制对象、控制器、测量元件和执行元件均有可能含有多个输入或输出变量,其结构更为复杂。变量之间耦合强度较小时比较容易控制,可以以一种线性独立的系统方式进行控制。各变量之间耦合强度较大时,就不可以忽略耦合对系统控制效果的影响,其严重影响到了控制系统的稳定性。[2] 2.3模糊控制稳态精度问题 随着工业过程被控对象的控制品质不断提升,对模糊控制稳态精度的要求也不断提高,由于模糊控制系统稳态精度低、存在余差的问题,高精度的模糊控制技术成为研究重点。模糊控制稳态精度的控制方法有很多,一种比较常用的方法是通过增加不同类别的积分器来避免模糊控制系统的稳态误差,以达到提升稳态精度的目的。采用在模糊控制系统中增加前馈积分项的方法,在伺服控制系统中取得了理想的稳态精度;也有采用在模糊控制系统中增加动态积分项的方法,当模糊控制系统的误差在一定范围以内,通过增加动态积分项控制系统输出,从而提高了模糊控制系统的性能。[3] 3模糊逻辑在控制领域的应用
《系统辨识与自适应控制》 课程论文 基于Matlab的模糊自适应PID控制器仿真研究 学院:电信学院 专业:控制工程 姓名:王晋 学号:
基于Matlab 的模糊自适应PID 控制器仿真研究 王晋 (辽宁科技大学 电信学院 鞍山) 摘 要:传统PID 在对象变化时,控制器的参数难以自动调整。将模糊控制与PID 控制结合,利用模糊推理方法实现对PID 参数的在线自整定。使控制器具有较好的自适应性。使用MATLAB 对系统进行仿真,结果表明系统的动态性能得到了提高。 关键词: 模糊PID 控制器;参数自整定;Matlab ;自适应 0引言 在工业控制中,PID 控制是工业控制中最常用的方法。但是,它具有一定的局限性:当控制对象不同时,控制器的参数难以自动调整以适应外界环境的变化。为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用模糊控制理论的方法[1] 模糊控制已成为智能自动化控制研究中最为活跃而富有成果的领域。其中,模糊PID 控制技术扮演了十分重要的角色,并目仍将成为未来研究与应用的重点技术之一。到目前为止,现代控制理论在许多控制应用中获得了大量成功的范例。然而在工业过程控制中,PID 类型的控制技术仍然占有主导地位。虽然未来的控制技术应用领域会越来越宽广、被控对象可以是越来越复杂,相应的控制技术也会变得越来越精巧,但是以PID 为原理的各种控制器将是过程控制中不可或缺的基本控制单元。本文将模糊控制和PID 控制结合起来,应用模糊推理的方法实现 对PID 参数进行在线自整定,实现PID 参数的最佳调整,设计出参数模糊自整定PID 控制器,并进行了 Matlab/Simulink 仿真[2] 。仿真结果表明,与常规PID 控制系统相比,该设计获得了更优的鲁棒性和动、静态性及具有良好的自适应性。 1 PID 控制系统概述 PID 控制器系统原理框图如图1所示。将偏差的比例(K P )、积分(K I )和微分(K D )通过线性组合构成控制量,对被控对象进行控制,K P 、K I 和K D 3个参数的选取直接影响了控制效果。 / 图1 PID 控制器系统原理框图 )( t u 比例 积分 微分 被控对)(t r )(t c )(t e
基于Matlab模糊自适应PID控制器设计 摘要:本文介绍了用模糊推理的原则进行PID参数的整定方法,并利用MATLAB仿真相结合的方法,实现了模糊自适应PID控制器与常规PID控制器的仿真与比较。 关键词:模糊控制PID 自适应 0引言 PID控制广泛应用于工业控制过程。但是大多数工业过程存在着非线性、参数时变性和模型不确定性,常规PID控制就显得无能。模糊自适应控制是一类应用模糊集合理论的控制方法,特别适用于一些大滞后、时变、非线性的复杂系统。 1模糊自适应PID控制器设计 1.1模糊自适应PID控制器的结构 模糊自适应PID控制器在PID控制器的基础上根据系统偏差e和偏差变化率ec,利用模糊规则进行模糊推理,使控制对象具有良好性能,从而控制的目的。结构如下图 图1自适应模糊PID 1.2模糊自适应PID控制算法的设计 (1)精确量得模糊化 该控制器采用2输入3输出的形式,输入语言变量e和ec的论域均为: {e、ec}={-3,-2,-1,0,1,2,3},其模糊集为{NB,NM,NS, ZO, PS, PM, PB},子集中元素分别为负大、负中、负小、零、正小、正中和正大。输出语言变量ΔKp、ΔKi、ΔKd 的论域为:ΔKp、ΔKi、ΔKd={-3, -2, -1,0, 1, 2, 3},其模糊集为{NB,NM,NS, ZO, PS,PM, PB}。 (2)建立模糊控制规则 依据自整定原则及工程设计人员的技术知识和实际操作经验,可列出相应的参数调节规则,建立参数Kp、Ki、Kd模糊控制规则表,如表1所示(3)Simulink 下的模糊推理与模糊控制器的建立 可以利用模糊逻辑工具箱在MATLAB命令窗口输入fuzzy命令按回车键,出来FIS Editor窗口,下来在编辑菜单下添加输入输出模块及进行规则添加,打
《智能控制》 模糊逼近作业报告 组员:李适、郑晓森、匡金龙、沈伟生、武云发黎浩炎、晏开、杜文学、杨晓星
目录 一、任务及要求 (3) 二、系统分析及控制设计原理 (3) 三、设计实现 (4) 四、仿真验证 (7) 五、讨论与分析 (12)
一、任务及要求 (1)任务 设计一个在 上的模糊系统,使其以精度 一致地逼近函数()()()()()ππππ2121cos sin cos sin x x x x x g ++=,并进行Matlab 仿真。 (2)要求 先进行系统分析,然后给出完整详细的设计过程,可参见P74-75页例5.1和例5.2的仿真实例。 二、系统分析及控制设计原理 自适应模糊控制是指具有自适应学习算法的模糊逻辑系统,其学习算法是依靠数据信息调整模糊逻辑系统的参数,且可以保证控制系统的稳定性。一个自适应模糊控制器可以用一个单一的自适应模糊系统构成,也可以用若干个自适应模糊系统构成。与传统的自适应控制相比,自适应模糊控制的优越性在于它可以利用操作人员提供的语言性模糊信息,而传统的自适应控制则不能。这一点对具有高度不确定因素的系统尤其重要。自适应模糊控制有两种不同形式:一种是直接自适应模糊控制,即根据实际系统性能与理想性能之间的偏差直接设计模糊控制器;另一种是间接自适应模糊控制,即通过在线模糊逼近获得对象的模型,然后根据所得模型在线设计控制器。 三、设计实现 (1)模糊系统的设计步骤 设二维模糊系统g(x)为集合22211],[],[R U ??=βαβα上的一个函数,其解析式形式未知。假设对任意一个U x ∈,都能得到g(x),则可设计一个逼近g(x)的 模糊系统。模糊系统的设计步骤为: 步骤1:在],[i i βα上定义)2,1(=i N i 个标准的,一致的和完备的模糊集 i N i i i i A A A A ,...,,,321。 [][]1,11,1-?-=U 1.0=ε
模糊PID 参数自整定 设被控对象为 s s s s G P 1047035.87523500 )(2 3++= 采样时间为1ms ,采样模糊PID 控制进行阶跃响应,在第300个采样时间时控制加的干扰,相应的响应结果如下图: Ki 的录属度函数 Kp 的录属度函数 )
e的录属度函数 ec的录属度函数 下面是系统在外界有干扰输入时普通PID和模糊PID参数自整定控制的阶跃响应曲线:
模糊PID控制阶跃响应 , 普通PID控制阶跃响应 . 从上面的仿真图可以看出,经过模糊PID参数自整定后,在外界干扰输入时,可以得到很好的控制效果。 下面是PID参数的整定曲线:.
Kp的自整定调整 Ki的自整定调整 Kd的自整定调整!
程序文本: %Fuzzy Tunning PID Control clear all; close all; a=newfis('fuzzpid'); a=addvar(a,'input','e',[-3,3]); %Parameter e a=addmf(a,'input',1,'NB','zmf',[-3,-1]); a=addmf(a,'input',1,'NM','trimf',[-3,-2,0]); a=addmf(a,'input',1,'NS','trimf',[-3,-1,1]); [ a=addmf(a,'input',1,'Z','trimf',[-2,0,2]); a=addmf(a,'input',1,'PS','trimf',[-1,1,3]); a=addmf(a,'input',1,'PM','trimf',[0,2,3]); a=addmf(a,'input',1,'PB','smf',[1,3]); a=addvar(a,'input','ec',[-3,3]); %Parameter ec a=addmf(a,'input',2,'NB','zmf',[-3,-1]); a=addmf(a,'input',2,'NM','trimf',[-3,-2,0]); a=addmf(a,'input',2,'NS','trimf',[-3,-1,1]); a=addmf(a,'input',2,'Z','trimf',[-2,0,2]); a=addmf(a,'input',2,'PS','trimf',[-1,1,3]); " a=addmf(a,'input',2,'PM','trimf',[0,2,3]); a=addmf(a,'input',2,'PB','smf',[1,3]); a=addvar(a,'output','kp',[,]); %Parameter kp a=addmf(a,'output',1,'NB','zmf',[,]); a=addmf(a,'output',1,'NM','trimf',[,,0]); a=addmf(a,'output',1,'NS','trimf',[,,]); a=addmf(a,'output',1,'Z','trimf',[,0,]); a=addmf(a,'output',1,'PS','trimf',[,,]); a=addmf(a,'output',1,'PM','trimf',[0,,]); a=addmf(a,'output',1,'PB','smf',[,]); 、 a=addvar(a,'output','ki',[,]); %Parameter ki a=addmf(a,'output',2,'NB','zmf',[,]); a=addmf(a,'output',2,'NM','trimf',[,,0]); a=addmf(a,'output',2,'NS','trimf',[,,]); a=addmf(a,'output',2,'Z','trimf',[,0,]); a=addmf(a,'output',2,'PS','trimf',[,,]); a=addmf(a,'output',2,'PM','trimf',[0,,]);
自适应模糊控制几个基本问题的研究进展 谢振华程江涛耿昌茂 (海军航空工程学院青岛分院航空军械系青岛 266041 ) 周德云 (西北工业大学西安 710072 ) [摘要] 综述了模糊控制系统的稳定性分析、系统设计及系统性能提高三个基本问题的研究 ,简述了应用研究 ,最后对自适应模糊控制的理论和应用进行了展望。 关键词模糊控制自适应控制鲁棒性稳定性 1 引言 自从 L. A. Zadeh提出模糊集合论以来 ,基于该理论形成一门新的模糊系统理论学科 ,在控制、信号处理、模式识别、通信等领域得到了广泛的应用。近年来 ,有关模糊控制理论及应用研究引起了学术界的极大兴趣 ,取得了一系列成功的应用和理论成果 ,与早期的模糊控制理论和应用相比有了很大的发展。模糊控制理论成为智能控制理论的一个重要分支。 一般来讲 ,模糊控制理论研究的核心问题在于如何解决模糊控制中关于稳定性和鲁棒性分析、系统的设计方法 (包括规则的获取和优化、隶属函数的选取等 )、控制系统的性能 (稳态精度、抖动及积分饱和度等 )的提高等问题 ,这己成为模糊控制研究中的几个公认的基本问题。其中 ,稳定性和鲁棒性问题的研究最为热烈 ,从早期基于模糊控制器的“多值继电器”等价模型的描述函数分析法 ,扩展到相平面法、关系矩阵分析法、圆判据、L yapunov稳定性理论、超稳定理论、基于滑模控制器的比较法、模糊穴 -穴映射及数值稳定性分析方法等非线性理论方法。设计方法的研究也倍受关注 ,主要表现在对规则的在线学习和优化、隶属函数参数的优化修正等应用了多种思想 ,如最优控制的二次型性能指标、自适应、神经网络、遗传算法等思想。稳态性能的改善一直是模糊控制学者所关注。 围绕上述几个基本问题 ,出现了多变量模糊控制[1 ,2 ] 、模糊神经网络技术 [3 ] 、神经模糊技术 [4 ] 、自适应模糊控制 [5] 、模糊系统辨识[6 ] 等热点研究领域。在模糊控制理论与应用方面 ,日本学者取得了很大的成就[7] ,我国学者在这方面也付出了不懈的努力 ,并取得了许多重要的成果。所有这些工作促进了模糊控制的理论和应用的快速发展。 本文拟对近几年自适应模糊控制几个基本问题的研究现状作一总结 ,希望能从这一侧面反映其研究情况和发展动向。主要内容包括 :( 1 )稳定性分析问题的研究 ;( 2 )系统设计方法的研究 ;( 3)系统性能提高的研 究 ;( 4 )应用研究情况。 2 稳定性分析 众所周知 ,任何一个自动控制系统 ,首先必须是稳定的 ,否则这个系统就无法工作。因此 ,在控制系统的分析和设计中 ,系统的稳定性研究占有重要的地位 ,模糊控制系统也是如此。由于模糊系统本质上的非线性和缺乏统一的系统描述 ,使得人们难以利用现有的控制理论和分析方法对模糊控制系统进行分析和
模糊自适应PID控制器 的设计
模糊自适应PID 控制器的设计 一、 模糊自适应原理 模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机控制方法,作为智能控制的一个重要分支,在控制领域获得了广泛应用,模糊控制与传统控制方式相比具有以下突出优点: ·不需要精确的被控对象的数学模型; ·使用自然语言方法,控制方法易于掌握; ·鲁棒性好,能够较大范围的适应参数变化; ·与常规PID 控制相比,动态响应品质优良。 常规模糊控制器的原理如图1所示: 图1 模糊控制系统框图 PID 控制规律: 1 01()[()()()] p D I d u t k e t e t dt T e t T dt =++? 式中:p k ---比例系数; I T ---积分时间常数; D T ---微分时间常数。 在工业生产中过程中,许多被控对象随着负荷变化或干扰因素影响,其对象特性参数或结构发生改变。自适应控制运用现代控制理论在线辨识对象特征参 数,实时改变其控制策略,使控制系统品质指标保持在最佳范围内,但其控制效果的好坏取决于辨识模型的精确度,这对于复杂系统是非常困难的。因此,在工业生产中过程中,大量采用的仍然是PID 算法,PID 参数的整定方法很多,但大多数都以对象特性为基础。 随着计算机技术的以展,人们利用人工智能的方法将操作人员的调整经验作为知识存入计算机中,根据现场实际情况,计算机能自动调整PID 参数,这样就出现了智能PID.这种控制器把古典的PID 控制与先进的专家系统相结合,实现系统的最佳控制。这种控制必须精确地确定模型,首先将操作人员长期实践积累
单片机模糊PID自整定控制算法的实现及仿真 单片机模糊PID自整定控制算法的实现及仿真 作者:未知文章来源:网络点击数:923 更新时间:2009-5-23 由于液压伺服系统的固有特性(如死区、泄漏、阻尼系数的时变性以及负载干扰的存在),系统往往会呈现典型的不确定性和非线性特性。 这类系统一般很难精确描述控制对象的传递函数或状态方程,而常规的PID控制又难以取得良好的控制效果。另外,单一的模糊控制虽不需要精确的数学模型,但是却极易在平衡点附近产生小振幅振荡,从而使整个控制系统不能拥有良好的动态品质。 本文针对这两种控制的优缺点并结合模糊控制技术,探讨了液压伺服系统的模糊自整定PID控制方法,同时利用MATLAB软件提供的Si mulink和Fuzzy工具箱对液压伺服调节系统的模糊自整定PID控制系统进行仿真,并与常规PID控制进行了比较。此外,本文还尝试将控制系统通过单片机的数字化处理,并在电液伺服实验台上进行了测试,测试证明:该方法能使系统的结构简单化,操作灵活化,并可增强可靠性和适应性,提高控制精度和鲁棒性,特别容易实现非线性化控制。 1 模糊PID自整定控制器的设计 本控制系统主要完成数据采集、速度显示和速度控制等功能。其中智能模糊控制由单片机完成,并采用规则自整定PID控制算法进行过程控制。整个系统的核心是模糊控制器,AT89C51单片机是控制器的主体模块。电液伺服系统输出的速度信号经传感器和A/D转换之后进入单片机,单片机则根据输入的各种命令,并通过模糊控制算法计算控制量,然后将输出信号通过D/A转换送给液压伺服系统,从而控制系统的速度。该模糊控制器的硬件框图如图1所示。 模糊控制器的主程序包括初始化、键盘管理及控制模块和显示模块的调用等。温度信号的采集、标度变换、控制算法以及速度显示等功能的实现可由各子程序完成。软件的主要流程是:利用AT89C51单片机调A/D转换、标度转换模块以得到速度的反馈信号,然后根据偏差和偏差的变化率计算输入量,再由模糊PID自整定控制算法得出输出控制量。启动、停止可通过键盘并利用外部中断产生,有按键输入则调用中断服务程序。该程序的流程图如图2所示。
基于模糊PID参数自整定的温度控制系 统的研究 摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温 摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温度系统动态性能。 关键词:温度控制;Matlab仿真;模糊规则;PID 在工业生产过程中温度是重要的控制参数之一,对温度的有效控制对于保证生产质量具有重大的现实意义和理论价值。工业温度控制系统具有非线性、时变性和滞后性等特性,而常规PID控制器参数往往整定不良,性能欠佳,对运行的工作情况适应性差,导致常规PID控制不能使温度控制达到理想效果。为了改善常规PID控制效果,增强系统的适应性,实现PID参数自整定,本文设计出一种PID参数自整定的模糊控制器。利用模糊逻辑对PID控制器参数进行调整实现控制效果最优,将温度作为控制对象,并利用Matlab的Simulink工具箱实现仿真对比分析常规PID与模糊PID的曲线,最后应用到实际的温度控制系统中,对比分析常规PID与模糊PID的控制效果。 1 PID控制算法的相关介绍 1.1 PID控制算法 PID控制器因为结构简单、容易实现,并且具有较强的鲁棒性,因而被广泛应用于各种工业过程控制中。在传统PID控制中,PID参数在线整定一直是人们研究的问题之一,最早提出PID参数工程整定方法的是Z-N整定公式,至今仍然在工业控制中应用。而常规PID整定参数的选择取决于多种因素,比如被控对象的动态性能、控制目标以及操作人员对系统的理解等,因此肯定造成整定效果不理想。人们发现单纯靠常规PID控制算法是无法完成各种复杂控制的。在这种背景下,专家首次提出了基于继电器反馈的自适应PID控制系统应用于工业控制领域中。近年来国外对于Fuzzy-PID的研究已经由先前的基于专家经验的模糊控制技术实现PID参数调整的研究,逐渐转向基于人工智能神
模糊逻辑与模糊控制技术的发展 宁廷群 1 肖英辉1任惠英 2 (1山东科技大学机电学院山东青岛 266510 2山东兖矿集团机械制修厂山东邹城 273500) The Development of Fuzzy Logic and Fuzzy Control Technology 摘要:针对现代工业控制领域的模糊控制技术的新发展,综合介绍了当代该领域的基本理论和发展现状,展望了未来的发展应用。 关键词:模糊控制;应用发展;自适应控制。 Abstract: This paper introduces the development of fuzzy logic and fuzzy control technology in modern control domain, and discusses the basic theory and main development in integration. At last it gives some prospects. Key words: fuzzy control, development and application, adaptive control 一、引言 在现代工业控制领域,伴随着计算机技术的突飞猛进,出现了智能控制的新趋势,即以机器模拟人类思维模式,采用推理、演绎和归纳等手段,进行生产控制,这就是人工智能。其中专家系统、模糊逻辑和神经网络是人工智能的几个重点研究热点。相对于专家系统,模糊逻辑属于计算数学的范畴,包含有遗传算法,混沌理论及线性理论等内容,它综合了操作人员的实践经验,具有设计简单,易于应用、抗干扰能力强、反应速度快、便于控制和自适应能力强等优点。近年来,在过程控制、建摸、估计、辩识、诊断、股市预测、农业生产和军事科学等领域得到了广泛应用。为深入开展模糊控制技术的研究应用,本文综合介绍了模糊控制技术的基本理论和发展状况,并对一些在电力电子领域的应用作了简单介绍。 二、模糊逻辑与模糊控制
第30卷增 刊 辽宁工程技术大学学报(自然科学版) 2011年5月 V ol.30 Suppl. Journal of Liaoning Technical University (Natural Science ) May 2011 收稿日期:2011-03-02 文章编号:1008-0562(2011)增刊Ⅰ-0190-03 PID 参数自整定模糊控制器的应用 李付举 (辽宁工程技术大学 理学院,辽宁 阜新 123000) 摘 要:针对电加热炉大惯性、纯滞后、参数时变的非线性对象的控制的特点,以及常规PID 控制参数不易调节的特点,提出了一种PID 参数自整定模糊控制方法,设计了PID 参数自整定模糊控制器,并在炉温控制系统中应用。实验结果表明: PID 参数自整定模糊控制消除了系统的稳态误差,没有超调和振荡,鲁棒性较强,而且简单易行,具有一定的实用价值。 关键词:PID 参数自整定;模糊控制;电加热炉;温度;误差 中图分类号:TM 924 文献标识码:A Application of fuzzy logic controller with self-tuning PID parameters LI Fuju (College of Science, Liaoning Technical University, Fuxin 123000, China ) Abstract :In view of electrical heating furnace's non-linear control object characteristics of large inertia, pure time-delay and parameters time-variation and the hard-to-tune characteristic of conventional PID control parameter, a new method for fuzzy control with self-tuning PID parameters was put forward. A fuzzy controller with self-tuning PID parameters was designed and applied in the furnace's temperature control system. The result shows that fuzzy control with self-tuning PID parameters eliminates the system's steady state error, has neither overshoot nor oscillation but great robustness, and is easily handled; therefore it is of some practical value . Key words :self-tuning PID parameters ;fuzzy control ;electrical heating furnace ;temperature ;error 0 引 言 电加热炉在现代工业生产中得到广泛应用。对这样一个大惯性、纯滞后、参数时变的非线性对象的控制,目前是研究的热点和难点问题。由于很难准确建立起电加热炉的数学模型,而且纯滞后时间 和惯性时间不易确定,仅用传统的控制方法难以完 成良好的控温任务。电加热炉温度控制系统,无论是启动或设定值升降,还是扰动影响,既希望时间上的快速性,也希望较平稳动态过程和精确的稳态 值。由于电加热炉的升温保温是靠电阻丝加热,降 温则是靠环境自然冷却,所以当温度一旦超调就无法用控制手段来使其降温。这类电加热炉控制对象具有非线性,时滞以及不确定性[1-2] 。电加热炉装置工业控制系统一般采用传统PID 控制方法,该方法 在特定的使用工况下具有较好的控制效果,但由于控制器的参数不便于调节,当使用工况发生变化 时,不能取得好的控制效果[3]。为了解决这一问题, 本文将模糊控制中模糊推理的思想和常规PID 控制 结合起来,将误差和误差变化作为模糊推理机的输 入,然后对PID 的3个参数进行在线自整定。这种方法能消除系统的稳态误差与颤振现象,显著改善 模糊控制系统的稳态性能。 1 PID 参数自整定模糊控制器 1.1 基本原理 常规PID 调节器因其算法简单而广泛用于工业过程控制中,通过调节PID 控制器的三个系数p I D k k k 、、,使其应用于各种不同的对象,并取得较好的控制效果。用计算机实现常规PID 的控制算法为 ()()()()k p I D i u k k E k k E i k EC k ==++∑ (1) 式中,()E k 、0 ()k i E i =∑ 、()EC k 分别为被控对象在采样时刻k 的误差、误差和、误差变化。 p I D k k k 、、分别为PID 的比例、积分和问题,虽