MSP430程序库(五)SPI同步串行通信
- 格式:pdf
- 大小:157.74 KB
- 文档页数:5
使用MCU的GPIO模拟SPI在树莓派等单片机(MCU)上,可以使用GPIO模拟SPI(串行外设接口)来与其他设备进行通信。
SPI是一种同步串行数据传输协议,通常用于连接MCU和传感器、显示器、存储器等外设。
以下是使用MCU的GPIO模拟SPI的详细步骤。
1.了解SPI的基本原理:SPI使用四根信号线进行通信,包括时钟(SCLK)、主机输出从机输入(MOSI)、主机输入从机输出(MISO)和片选(SS)。
-SCLK:时钟信号,由主机产生,用于同步数据传输。
-MOSI:主机输出从机输入,主机将数据发送到从机。
-MISO:主机输入从机输出,从机将数据发送到主机。
-SS:片选信号,用于选择从机。
2.确定所需GPIO引脚:根据所连接的设备的要求,选择合适的GPIO引脚作为SCLK、MOSI、MISO和SS。
3. 配置GPIO引脚:在MCU上,使用相应的编程语言和库函数来配置GPIO引脚。
例如,在树莓派上使用Python编程,可以使用RPi.GPIO库进行配置。
4.编写SPI传输函数:编写一个函数来模拟SPI传输。
该函数应包括以下步骤:a.设置SS为低电平,选中从机设备。
b.发送数据比特串:逐位发送MOSI数据,同时接收并保存MISO数据。
c.设置SS为高电平,取消从机设备的选中。
假设我们要发送8位数据,可以使用以下Python代码实现SPI传输函数:```pythonimport RPi.GPIO as GPIOdef spi_transfer(data):GPIO.output(SS, GPIO.LOW) # 选中从机received_data = 0for bit in range(7, -1, -1): # 逐位传输数据#发送MOSI数据GPIO.output(MOSI, (data >> bit) & 0x01)#接收并保存MISO数据received_bit = GPIO.input(MISO)received_data = (received_data << 1) , received_bit#在SCLK上升沿发送和接收数据GPIO.output(SCLK, GPIO.HIGH)GPIO.output(SCLK, GPIO.LOW)GPIO.output(SS, GPIO.HIGH) # 取消从机选中return received_data```5. 通过调用SPI传输函数与从机通信:在应用程序中,根据需要调用SPI传输函数。
基于MSP430单片机和nRF905的无线通信系统引言随着信息技术的不断发展,人们对通信技术的需求越来越强,摆脱有线网络的束缚实现无线通信始终是大家关心的问题,当今无线通信研究越来越热,应用非常广泛,使人与人之间的通信更加方便快捷,更具有市场发展前景。
本文以Nordic公司的nRF905作为通讯的核心,设计了无线通信系统。
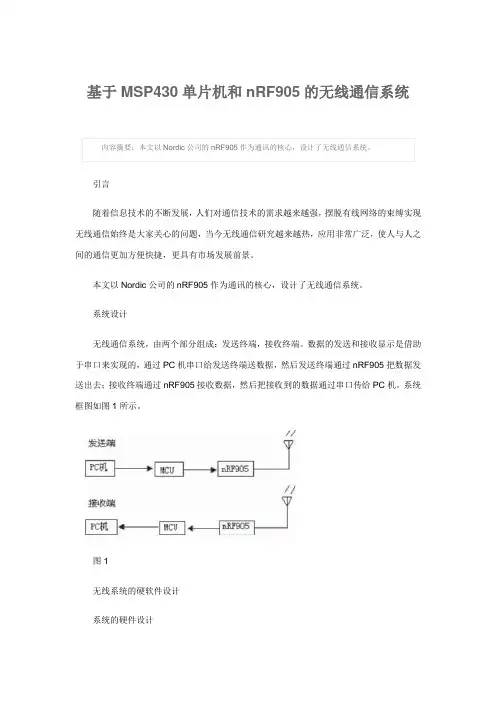
系统设计无线通信系统,由两个部分组成:发送终端,接收终端。
数据的发送和接收显示是借助于串口来实现的,通过PC机串口给发送终端送数据,然后发送终端通过nRF905把数据发送出去;接收终端通过nRF905接收数据,然后把接收到的数据通过串口传给PC机。
系统框图如图1所示。
图1无线系统的硬软件设计系统的硬件设计本系统采用的射频收发器为NordicVLSI公司的nRF905,工作电压为1.9~3.6V,工作于433/868/915MHz三个ISM频段,频段之间的转换时间小于650us。
nRF905由频率合成器、接收解调器、功率放大器、晶体振荡器和调制器组成,不需外加声表滤波器。
高抗扰GFSK调制,数据速率为50kbps,独特的载波监测输出,地址匹配输出,数据就绪输出。
ShockBurstTM工作模式,自动处理字头和CRC(循环冗余码校验),使用SPI接口与微控制器通信,配置非常方便。
此外,其功耗非常低,以-10dBm的输出功率发射时电流只有11 mA,工作于接收模式时的电流为12.5mA,内建空闲模式与关机模式,易于实现节能。
nR F905的硬件连接电路图如图2所示。
采用的微处理器为TI公司的MSP430F149,它是一种超低功耗的混合信号控制器,具有1 6位RISC结构,CPU中的16个寄存器和常数产生器使MSP430能达到最高的代码效率。
单片机通过采用不同的时钟源工作可以使器件满足不同功耗要求,适当选择时钟源,可以让器件的功耗达到最小。
外设主要有存储器、时钟模块、定时器、USART和A/D转换器等。
SPI(SerialPeripheralInterface)协议SPI是串⾏外设接⼝(Serial Peripheral Interface)的缩写,是Motorola推出的⼀种同步串⾏接⼝技术,是⼀种⾼速的、全双⼯、同步的通信总线。
全双⼯:host能与外围从设备之间的发送线和接收线各⾃独⽴,能同时进⾏发送数据和接收数据。
源同步传输⽂章内容SPI介绍SPI协议通信时序详解SPI数据传输⽅式SPI总线优缺点1、SPI介绍应⽤场景SPI协议主要⽤于短距离的通信系统中,特别是嵌⼊式系统:存储器:RAM,EEPROM,Flash等数模转换器:A/D, D/A转换器等驱动接⼝:LED显⽰驱动器,I/O接⼝芯⽚,UART接收器等。
主从模式控制:SPI以主从⽅式进⾏⼯作,这种模式通常包含⼀个master和⼀个或多个slave,需要⾄少4根线(在单向传输时3根也可以),分别为:SDO/MOSI(master output slave input):主设备数据输出,从设备数据输⼊;SDI/MISO(master input slave output):主设备数据输⼊,从设备数据输出;SCLK:时钟信号,由主设备产⽣;CS/SS:⽚选信号,主设备控制并⽤于选择与其通信的从设备。
多Slave的SPI协议SPI协议可以操作在⼀个master对应⼀个或者多个slave的条件下,此时有多个CS/SS⽚选信号,但是⼀个时间只能有⼀个⽚选信号有效。
slave的输出端⼝MISO都是三态驱动;⾼电平,低电平和不选中时输出为⾼阻态。
数据交换(data exchanges)SPI设备之间的数据传输称为数据交换⽽不是数据传输。
这是因为SPI设备不能在进⾏数据通信的过程中仅充当transmitter和recieiver的⾓⾊,⽽是在每个时钟周期内,主从SPI设备都会发送1bit⼤⼩的数据,相当于主从设备进⾏了1bit的数据交换。
在数据的传输过程中,每次接收到的数据必须在下⼀次数据传输之前被采样,如果之前接收的数据没有被采样,那么这些已经收到的数据可能被丢弃,导致 SPI 模块最终失效,因此,在程序中,⼀般都会在 SPI 传输完数据之后,去读取 SPI 设备⾥⾯的数据,即使这些数据是在我们程序中是没有⽤的。
MSP430F149的串口RS232接口1、概述具有同步串口模式(SPI),异步通信模式(UART)。
作异步通信时,P3.4,P3.5,P3.6,P3.7第二功能分别是UTXD0, URXD0, UTXD1, UTXD2 2、使用方法概述2.1 程序架构配置寄存器设置工作模式{设置IO口为第二功能作为串口收发引脚;使能串口收发功能;选择每帧数据位为7或8;选择波特率发生器时钟源;配置波特率(查表得出值再配置UxBR0, UxBR1,UxMCTL);软件清除串口复位位(SWRST);若采用中断方式则使能接受、发送中断}编写接受/发送程序,可采用查询方式或中断方式。
同51单片机不同的是,UTXIFG,URXIF 在发送下一个数据和读取数据时被自动清零了,无需软件清除。
2.2 细节描述配置波特率时用户手册上有速查表,如下设置波特率时要选择合适的时钟源。
对于较低的波特率(9600b/s及以下),可选ACLK,大于9600要选用SMCLK,因为串口波特率发生器分频系数要求大于3。
UxBR0(低)UxBR1(高)值的计算式为:选择的时钟源/波特率,再取整。
为了精确,MSP430设置了小数分频功能,通过UxMCTL来完成。
3、相关寄存器1.ME1, Module Enable Register 1UTXE0 Bit 7 USART0 transmit enable. This bit enables the transmitter for USART0.0 Module not enabled1 Module enabledURXE0 Bit 6 USART0 receive enable. This bit enables the receiver for USART0.0 Module not enabled1 Module enabled2.UxCTL(UCTLx), USART Control RegisterCHAR Bit 4 Character length. Selects 7-bit or 8-bit character length.0 7-bit data1 8-bit dataSWRST Bit 0 Software reset enable0 Disabled. USART reset released for operation1 Enabled. USART logic held in reset state3.UxTCTL(UTCTLx), USART Transmit Control RegisterSSELx Bits5-4Source select. These bits select the BRCLK source clock.00 UCLKI01 ACLK10 SMCLK11 SMCLK4.UxBR0, USART Baud Rate Control Register 0,低8位UxBR1, USART Baud Rate Control Register 1,高8位5. UxMCTL, USART Modulation Control RegisterUxMCTLx Bits7−0Modulation bits. These bits select the modulation for BRCLK.6.IFG1, Interrupt Flag Register 1UTXIFG0 Bit 7 USART0 transmit interrupt flag. UTXIFG0 is set when U0TXBUF is empty.0 No interrupt pending1 Interrupt pendingURXIFG0 Bit 6 USART0 receive interrupt flag. URXIFG0 is set when U0RXBUF has receiveda complete character.0 No interrupt pending1 Interrupt pending7.IE1, Interrupt Enable Register 1UTXIE0 Bit 7 USART0 transmit interrupt enable. This bit enables the UTXIFG0 interrupt.0 Interrupt not enabled1 Interrupt enabledURXIE0 Bit 6 USART0 receive interrupt enable. This bit enables the URXIFG0 interrupt.0 Interrupt not enabled1 Interrupt enabled4、实例4.1 配置为N.8.1,9600,查询方式收发数据/*******************************************函数名称:InitUART功能:初始化UART端口参数:无返回值:无********************************************/void InitUART(void){P3SEL |= 0x30; // P3.4,5 = USART0 TXD/RXDME1 |= URXE0 + UTXE0; // Enable USART0 T/RXDUCTL0 |= CHAR; // 8-bit characterUTCTL0 |= SSEL0; // UCLK = ACLKUBR00 = 0x03; // 32k/9600 - 3.41UBR10 = 0x00; //UMCTL0 = 0x4A; // ModulationUCTL0 &= ~SWRST; // Initialize USART state machine }收数据if(IFG1 & URXIFG0) Disp1Char(U0RXBUF); //如果收到字符发数据while (!(IFG1 & UTXIFG0)); TXBUF0 =Char;4.2 配置接收数据中断方式P3SEL |= 0x30; // 选择P3.4和P3.5做UART通信端口ME1 |= UTXE0 + URXE0; // 使能USART0的发送和接受UCTL0 |= CHAR; // 选择8位字符UTCTL0 |= SSEL0; // UCLK = ACLKUBR00 = 0x03; // 波特率9600UBR10 = 0x00; //UMCTL0 = 0x4A; // ModulationUCTL0 &= ~SWRST; // 初始化UART状态机IE1 |= URXIE0; // 使能USART0的接收中断_EINT();中断服务函数#pragma vector = UART0RX_VECTOR __interrupt void UART0_RXISR(void) { }。
MSP430单片机入门例程MSP430单片机是一款低功耗、高性能的16位单片机,广泛应用于各种嵌入式系统。
下面是一个简单的MSP430单片机入门例程,可以让大家初步了解MSP430单片机的基本使用方法。
所需材料:1、MSP430单片机开发板2、MSP430单片机编译器3、MSP430单片机调试器4、电脑和相关软件步骤:1、安装MSP430单片机编译器首先需要安装MSP430单片机的编译器,该编译器可以将C语言代码编译成MSP430单片机可以执行的机器码。
在安装编译器时,需要选择与您的单片机型号匹配的编译器。
2、编写程序下面是一个简单的MSP430单片机程序,可以让LED灯闪烁:c本文include <msp430.h>int main(void)本文P1DIR |= 0x01; //设置P1.0为输出while(1){P1OUT ^= 0x01; //反转P1.0的状态,LED闪烁__delay_cycles(); //延时一段时间,控制闪烁频率}本文上述程序中,首先定义了P1DIR寄存器,将P1.0设置为输出。
然后进入一个无限循环,在循环中反转P1.0的状态,使LED闪烁。
使用__delay_cycles()函数实现延时,控制LED闪烁频率。
3、编译程序使用MSP430单片机编译器将程序编译成机器码,生成可执行文件。
在编译时,需要注意选择正确的编译器选项和单片机型号。
4、调试程序使用MSP430单片机调试器将可执行文件下载到单片机中,并使用调试器进行调试。
在调试时,可以观察单片机的输出口状态和LED灯的闪烁情况,确保程序正常运行。
随着嵌入式系统的发展,MSP430单片机作为一种低功耗、高性能的微控制器,在各种应用领域中得到了广泛的应用。
为了更好地理解和应用MSP430单片机,我在学习过程中积累了一些经验,现在分享给大家。
MSP430单片机是一种超低功耗的微控制器,由德州仪器(Texas Instruments)推出。

T EXAS I NSTRUMENTSMPS430系列混合信号微控制器结构及模块用户指南目录1MSP430系列1.1特性与功能1.2系统关键性能1.3MSP430系列的各型号2结构概述2.1CPU2.2代码存储器2.3数据存储器(RAM)2.4运行控制2.5外围模块2.6振荡器、倍频器和时钟发生器3系统复位、中断和运行模式3.1系统复位和初始化3.2中断系统结构3.3中断处理3.3.1SFR中的中断控制位3.3.2外部中断3.4运行模式3.5低功耗模式3.5.1 低功耗模式0与模式1,LPM0和LPM1 3.5.2 低功耗模式2与模式3,LPM2和LPM3 3.5.3 低功耗模式4,LPM43.6 低功耗应用要点4 存储器组织4.1 存储器中的数据4.2 片内ROM组织4.2.1 ROM表的处理4.2.2 计算分支跳转和子程序调用4.3 RAM与外围模块组织4.3.1 RAM4.3.2 外围模块—地址定位4.3.3 外围模块--SFR5 16位CPU5.1 CPU寄存器5.1.1 程序计数器PC5.1.2 系统堆栈指针SP5.1.3 状态寄存器SR5.1.4 常数发生寄存器CG1与CG25.2 寻址模式5.2.1 寄存器模式5.2.2 变址模式5.2.3 符号模式5.2.4 绝对模式5.2.5 间接模式5.2.6 间接增量模式5.2.7 立即模式5.2.8 指令的时钟周期与长度5.3 指令组概述5.3.1 双操作数指令5.3.2 单操作数指令5.3.3 条件跳转5.3.4 模拟指令的短格式5.3.5 其它指令5.4 指令分布6 硬件乘法器6.1 硬件乘法器的操作6.2 硬件乘法器的寄存器6.3 硬件乘法器的SFR位6.4 硬件乘法器的软件限制6.4.1 硬件乘法器软件限制--寻址模式6.4.2 硬件乘法器软件限制--中断程序7 振荡器与系统时钟发生器7.1 晶体振荡器7.2 处理机时钟发生器7.3 系统时钟运行模式7.4 系统时钟控制寄存器7.4.1 模块寄存器7.4.2 与系统时钟发生器相关的SFR位7.5 DCO典型特性8 数字I/O配置8.1 通用端口P08.1.1 P0控制寄存器8.1.2 P0原理图8.1.3 P0中断控制功能8.2 通用端口P1、P28.2.1 P1、P2控制寄存器8.2.2 P1、P2原理图8.2.3 P1、P2中断控制功能8.3 通用端口P3、P48.3.1 P3、P4控制寄存器8.3.2 P3、P4原理图8.4 LCD端口8.5 LCD端口--定时器/端口比较器9 通用定时器/端口模块9.1 定时器/端口模块操作9.1.1 定时器/端口计数器TPCNT1,8位操作9.1.2 定时器/端口计数器TPCNT2,8位操作9.1.3 定时器/端口计数器,16位操作9.2 定时器/端口寄存器9.3 定时器/端口SFR位9.4 定时器/端口在A/D中的应用9.4.1 R/D转换原理9.4.2 分辨率高于8位的转换10 定时器10.1 Basic Timer110.1.1 BasicTimer1寄存器10.1.2 SFR位10.1.3 BasicTimer1操作10.1.4 BasicTimer1操作:LCD时钟信号f LCD 10.2 8位间隔(Interval)定时器/计数器10.2.1 8位定时器/计数器的操作10.2.2 8位定时器/计数器的寄存器10.2.3 与8位定时器/计数器有关的SFR 10.2.4 8位定时器/计数器在UART中的应用10.3 看门狗定时器10.3.1 看门狗定时器寄存器10.3.2 看门狗定时器中断控制功能10.3.3 看门狗定时器操作10.4 8位PWM定时器10.4.1 操作10.4.2 PWM寄存器11 Timer_A11.1 Timer_A的操作11.1.1 定时器操作11.1.2 捕获模式11.1.3 比较器模式11.1.4 输出单元11.2 Timer_A的寄存器11.2.1 Timer_A控制寄存器TACTL11.2.2 捕获/比较控制寄存器CCTL11.2.3 Timer_A中断向量寄存器11.3 Timer_A的应用11.3.1 Timer_A增计数模式应用11.3.2 Timer_A连续模式应用11.3.3 Timer_A增/减计数模式应用11.3.4 Timer_A软件捕获应用11.3.5 Timer_A处理异步串行通信协议11.4 Timer_A的特殊情况11.4.1 CCR0用作周期寄存器11.4.2 定时器寄存器的启/停11.4.3 输出单元Unit012 USART外围接口,UART模式12.1 异步操作12.1.1 异步帧格式12.1.2 异步通信的波特率发生器12.1.3 异步通信格式12.1.4 线路空闲多处理机模式12.1.5 地址位格式12.2 中断与控制功能12.2.1 USART接收允许12.2.2 USART发送允许12.2.3 USART接收中断操作12.2.4 USART发送中断操作12.3 控制与状态寄存器12.3.1 USART控制寄存器UCTL12.3.2 发送控制寄存器UTCTL12.3.3 接收控制寄存器URCTL12.3.4 波特率选择和调制控制寄存器12.3.5 USART接收数据缓存URXBUF12.3.6 USART发送数据缓存UTXBUF12.4 UART模式,低功耗模式应用特性12.4.1 由UART帧启动接收操作12.4.2 UART模式波特率与时钟频率12.4.3 节约MSP430资源的多处理机模式12.5 波特率的计算13 USART外围接口,SPI模式13.1 USART的同步操作13.1.1 SPI模式中的主模式,MM=1、SYNC=1 13.1.2 SPI模式中的从模式,MM=0、SYNC=1 13.2 中断与控制功能13.2.1 USART接收允许13.2.2 USART发送允许13.2.3 USART接收中断操作13.2.4 USART发送中断操作13.3 控制与状态寄存器13.3.1 USART控制寄存器13.3.2 发送控制寄存器UTCTL13.3.3 接收控制寄存器URCTL13.3.4 波特率选择和调制控制寄存器13.3.5 USART接收数据缓存URXBUF 13.3.6 USART发送数据缓存UTXBUF14 液晶显示驱动14.1 LCD驱动基本原理14.2 LCD控制器/驱动器14.2.1 LCD控制器/驱动器功能14.2.2 LCD控制及模式寄存器14.2.3 LCD显示存储器14.2.4 LCD操作软件例程14.3 LCD端口功能14.4 LCD与端口模式混合应用实例15 A/D转换器15.1 概述15.2 A/D转换操作15.2.1 A/D转换15.2.2 A/D中断15.2.3 A/D量程15.2.4 A/D电流源15.2.5 A/D输入端与多路切换15.2.6 A/D接地与降噪15.2.7 A/D输入与输出引脚15.3 A/D控制寄存器16 其它模块16.1 晶体振荡器16.2 上电电路16.3 晶振缓冲输出附录A 外围模块分布附录B 指令组说明附录C EPROM编程本书用途及表述约定MSP430用户指南以方便工程师及程序员使用的方式提供软件和硬件资料,以帮助开发应用MSP430系列的产品。
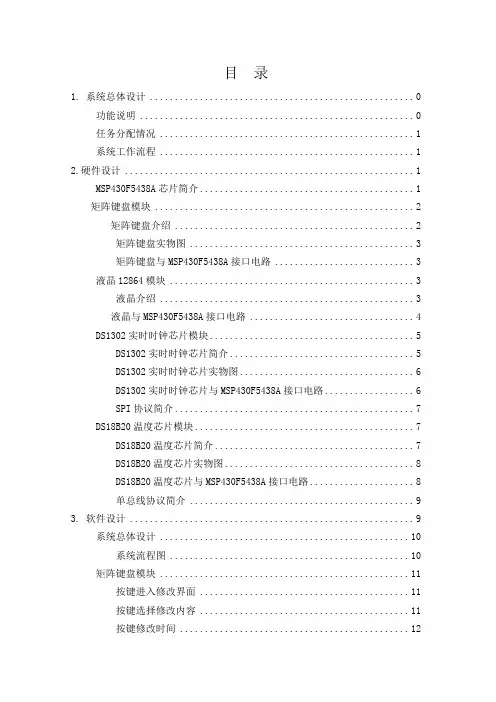
目录1. 系统总体设计 0功能说明 0任务分配情况 (1)系统工作流程 (1)2.硬件设计 (1)MSP430F5438A芯片简介 (1)矩阵键盘模块 (2)矩阵键盘介绍 (2)矩阵键盘实物图 (3)矩阵键盘与MSP430F5438A接口电路 (3)液晶12864模块 (3)液晶介绍 (3)液晶与MSP430F5438A接口电路 (4)DS1302实时时钟芯片模块 (5)DS1302实时时钟芯片简介 (5)DS1302实时时钟芯片实物图 (6)DS1302实时时钟芯片与MSP430F5438A接口电路 (6)SPI协议简介 (7)DS18B20温度芯片模块 (7)DS18B20温度芯片简介 (7)DS18B20温度芯片实物图 (8)DS18B20温度芯片与MSP430F5438A接口电路 (8)单总线协议简介 (9)3. 软件设计 (9)系统总体设计 (10)系统流程图 (10)矩阵键盘模块 (11)按键进入修改界面 (11)按键选择修改内容 (11)按键修改时间 (12)液晶模块 (13)DS1302实时时钟芯片模块 (14)DS1302的初始化 (14)DS1302的读写 (14)DS18B20温度芯片模块 (15)DS18B20初始化 (15)DS18B20写操作 (16)DS18B20读操作 (16)芯片值转化为显示值模块 (17)4.实验结果 (17)整体图 (17)运行过程 (17)5. 缺陷与调试 (21)调试过程 (21)程序的缺陷 (22)6. 实验心得 (22)7. 附录 (22)1.系统总体设计1.1功能说明本次课程设计的要求是制作一个电子万年历,要求在显示屏上显示年、月、日、时、分、秒、周、温度等信息,并且能够自行修改相关信息,且在修改信息时时钟停振。
根据要求所设计的系统的总体框架如图1所示:矩阵键盘MSP430F5338ADS1302 12864 DS18B20时钟芯片显示屏温度芯片图1 系统总体框架图1、单片机最小系统要求系统设计使用Texas Instrument公司的MSP430F5438A单片机作为系统的核心控制器。
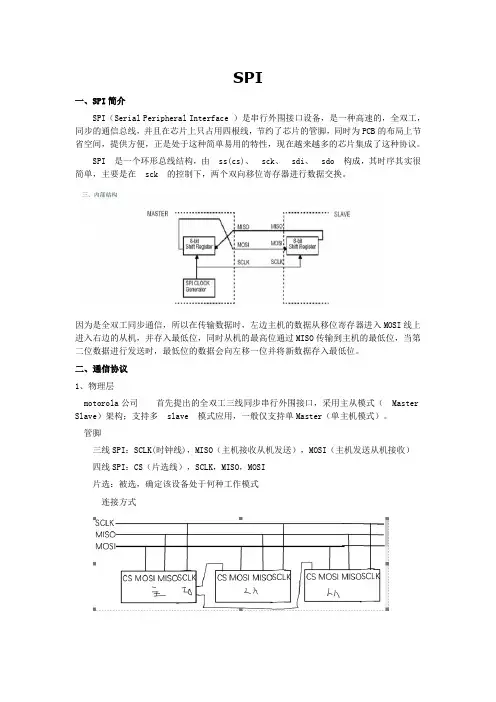
SPI一、SPI简介SPI(Serial Peripheral Interface )是串行外围接口设备,是一种高速的,全双工,同步的通信总线,并且在芯片上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是处于这种简单易用的特性,现在越来越多的芯片集成了这种协议。
SPI 是一个环形总线结构,由ss(cs)、sck、sdi、sdo 构成,其时序其实很简单,主要是在sck 的控制下,两个双向移位寄存器进行数据交换。
因为是全双工同步通信,所以在传输数据时,左边主机的数据从移位寄存器进入MOSI线上进入右边的从机,并存入最低位,同时从机的最高位通过MISO传输到主机的最低位,当第二位数据进行发送时,最低位的数据会向左移一位并将新数据存入最低位。
二、通信协议1、物理层motorola公司首先提出的全双工三线同步串行外围接口,采用主从模式(Master Slave)架构;支持多slave 模式应用,一般仅支持单Master(单主机模式)。
管脚三线SPI:SCLK(时钟线),MISO(主机接收从机发送),MOSI(主机发送从机接收)四线SPI:CS(片选线),SCLK,MISO,MOSI片选:被选,确定该设备处于何种工作模式连接方式2、数据链路层SPI采用位协议,------高位在前,低位在后SPI有四种工作模式,SPI0 SPI1 SPI2 SPI3SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
目录1.实验1 USC时钟系统------------------------------------------------------------------------------------------------------22.实验2 GPIO和EXTI-------------------------------------------------------------------------------------------------------33.实验3 串口通信UART----------------------------------------------------------------------------------------------------44.实验4 SPI通信------------------------------------------------------------------------------------------------------------55.实验5 I2C通信------------------------------------------------------------------------------------------------------------66.实验6 Timer_A定时器---------------------------------------------------------------------------------------------------77.实验7 Timer_B定时器--------------------------------------------------------------------------------------------------108.实验8 看门狗WDT--------------------------------------------------------------------------------------------------------139.实验9 RTC时间-----------------------------------------------------------------------------------------------------------1410.实验10 ADC_12----------------------------------------------------------------------------------------------------------1511.实验11 Flash编程-----------------------------------------------------------------------------------------------------1612.实验12 低功耗LPM-----------------------------------------------------------------------------------------------------1713.实验13 DMA传输--------------------------------------------------------------------------------------------------------1914. 实验14 键盘数码管ZLG7290----------------------------------------------------------------------------------------2115. 实验15 液晶显示LCD1602-------------------------------------------------------------------------------------------2216. 实验16 液晶显示LCD12864-----------------------------------------------------------------------------------------2317. 实验17 液晶显示TFT-------------------------------------------------------------------------------------------------2418. 实验18 数字温度传感器DS18B20----------------------------------------------------------------------------------25实验1 USC时钟系统一.实验原理图 Array二.实验步骤1. 下载程序。
MSP430F5438USCI模块的详细介绍MSP430F5438是一款德州仪器(TI)推出的超低功耗微控制器,搭载了USCI模块,提供多种通信接口,包括UART、SPI和I2C。
本文将详细介绍MSP430F5438的USCI模块的特性和应用。
USCI模块在MSP430F5438上有两个实例,分别称为USCI_A和USCI_B。
每个实例都可以配置为UART、SPI或I2C模式,提供相应的寄存器和功能。
以下将分别介绍每个实例的特性和应用。
CI_A模块:USCI_A模块是一个通用的串行通信模块,可配置为UART、SPI或I2C模式。
它提供了几个寄存器和功能,用于配置串口参数、接收和发送数据。
在UART模式下,USCI_A可以实现异步串行通信,支持多种波特率和数据格式。
在SPI模式下,它可以与其他设备进行高速的全双工通信,支持主从模式和多主模式。
在I2C模式下,USCI_A可以作为主设备或从设备,与其他I2C设备进行双向通信。
应用方面,USCI_A模块可用于实现与外部设备的通信,如串行打印机、传感器、外部存储器等。
通过UART模式,MSP430F5438可以与PC进行通信,进行数据传输和远程调试。
通过SPI模式,可以与其他MSP430微控制器或外部器件进行高速数据传输,如液晶显示屏、无线模块等。
通过I2C模式,可以与其他I2C设备(例如传感器、实时时钟等)进行双向通信,实现数据采集和控制。
CI_B模块:USCI_B模块也是一个通用的串行通信模块,可配置为UART、SPI或I2C模式。
它与USCI_A模块类似,提供了相应的寄存器和功能,用于配置通信参数和执行数据传输。
在UART模式下,USCI_B支持多种波特率、数据格式和校验方式。
在SPI模式下,它支持全双工通信和多种传输模式。
在I2C模式下,USCI_B可以作为主设备或从设备,与其他I2C设备进行双向通信。
应用方面,USCI_B模块与USCI_A模块相似,可应用于串行通信和外设接口。
MSP430单片机的发展德州仪器1996年到2000年初,先后推出了31x、32x、33x等几个系列,这些系列具有LCD驱动模块,对提高系统的集成度较有利。
每一系列有ROM 型(C)、OTP 型(P)、和 EPROM 型(E)等芯片。
EPROM 型的价格昂贵,运行环境温度范围窄,主要用于样机开发。
这也表明了这几个系列的开发模式,即:用户可以用 EPROM 型开发样机;用OTP型进行小批量生产;而ROM 型适应大批量生产的产品。
2000 年推出了11x/11x1系列。
这个系列采用20脚封装,内存容量、片上功能和 I/O 引脚数比较少,但是价格比较低廉。
这个时期的MPS430已经显露出了它的特低功耗等的一系列技术特点,但也有不尽如人意之处。
它的许多重要特性如:片内串行通信接口、硬件乘法器、足够的 I/O 引脚等,只有33x 系列才具备。
33x系列价格较高,比较适合于较为复杂的应用系统。
当用户设计需要更多考虑成本时,33x并不一定是最适合的。
而片内高精度A/D转换器又只有32x系列才有。
2000年7月推出了F13x/F14x 系列,在2001年7月到2002年又相继推出F41x、F43x、F44x。
这些全部是 Flash 型单片机。
F41x系列单片机有48个I/O 口,96段LCD驱动。
F43x、F44x系列是在13x、14x的基础上,增加了液晶驱动器,将驱动LCD的段数由3xx系列的最多120段增加到160段。
并且相应地调整了显示存储器在存储区内的地址,为以后的发展拓展了空间。
MSP430系列的部分产品具有Flash存储器,在系统设计、开发调试及实际应用上都表现出较明显的优点。
TI公司推出具有Flash 型存储器及JTAG 边界扫描技术的廉价开发工具MSP-FET430X110,将国际上先进的JTAG技术和Flash在线编程技术引入MSP430。
这种以Flash 技术与FET开发工具组合的开发方式,具有方便、廉价、实用等优点,给用户提供了一个较为理想的样机开发方式。
MSP430单片机选型指南MSP430是德州仪器(TI)公司推出的一系列超低功耗、高性能的16位RISC单片机。
它广泛应用于各种电子设备中,如智能传感器、电表、医疗设备等。
MSP430系列单片机具有低功耗、高性能、丰富的外设和易用性等特点。
本文将为大家介绍如何选择合适的MSP430单片机。
首先,要考虑所需的性能。
MSP430单片机系列提供了多个不同性能级别的芯片,如MSP430F5xx系列、MSP430F6xx系列等。
性能水平的选择主要根据应用的需求来定。
如果应用需要高性能的计算和通信能力,则可以选择性能较高的芯片。
如果应用对功耗要求较高,则可以选择性能较低的芯片。
其次,要考虑所需的外设。
MSP430单片机提供了丰富的外设,如UART、SPI、I2C、ADC等。
根据应用的需求,选择具备相应外设的芯片。
如果应用需要进行串行通信,则需要选择具有UART、SPI、I2C等外设的芯片。
如果应用需要进行模数转换,则需要选择具有ADC外设的芯片。
此外,还需要考虑所需的存储器容量。
MSP430单片机提供了不同容量的Flash存储器和RAM存储器。
Flash存储器用于存储程序代码,RAM 存储器用于存储数据。
根据应用需要的代码和数据存储容量,选择具有相应容量的芯片。
另外,还需要考虑片上外设的数量和功能。
MSP430单片机提供了多个GPIO引脚,可以用于连接外部器件。
根据应用需要的外部器件数量,选择具有足够引脚数量的芯片。
此外,MSP430单片机还提供了一些特殊功能外设,如计时器、看门狗定时器等。
根据应用的需求,选择具有相应特殊功能外设的芯片。
总之,选择合适的MSP430单片机需要考虑性能、外设、存储器、片上外设、开发工具和技术支持等多个方面。
根据应用的需求,选择具备相应特性的芯片。
通过合适的选择,可以帮助开发者提高开发效率,降低成本,设计出更加优秀的产品。
MSP430无论是仿真还是烧写程序,一般可以通过:JTAG、SBW、BSL接口进行。
1、JTAG是利用边界扫描技术,在430内部有逻辑接口给JTAG使用,内部有若干个寄存器连接到了430内部数据地址总线上,所以可以访问到430的所有资源,包括全地址FLASH、RAM及各种寄存器。
可以用于对430的仿真和编程,主要连接线有TMS、TCK、TDI、TDO,430还需要另两条线路RST、TEST来启动JTAG命令序列。
2、SBW是SPY-BI-WIRE,可以简称为两线制JTAG,主要有SBWTCK(连接到JTAG 接口的7脚TCK)与SBWTDIO(连接到JTAG接口的1脚TDO/TDI),该接口主要用于小于28脚的2系列单片机,因为28脚以内单片机的JTAG一般与IO口复用,为了给用于留有更多的IO资源,才推出SBW接口。
SBW同JTAG一样可以访问到430内部的所有资源。
注:目前MSP430F5XX系列中也有SBW接口,原理同2系列的SBW。
3、BSL是TI在430出厂时预先固化到MCU内部的一段代码,该代码用户不可读写,这有点类似与DSP的bootloader,但又与bootloader有明显的区别,BSL只能用于对MCU内部的FLASH访问,不能对其他的资源访问,所以只能用作编程器接口。
BSL通过UART协议与编程器连接通信。
编程器可以发送不同的通信命令来对MCU的存储器做不同的操作,可以把这种方式称为BSL接口。
BSL代码的启动有些特殊,一般430复位启动时PC指针指向FFFE复位向量,但可以通过特殊的启动方式可以使MCU在启动时让PC指向BSL内部固化的程序。
这种特殊的启动方式一般是由RST引脚与TEST(或TCK)引脚做一个稍复杂的启动逻辑后产生。
BSL启动后,就可以通过预先定义好的UART协议命令对MCU进行读写访问了。
4、一般的MCU都有代码加密功能,430是如何实现的呢?外部对430内部的代码读写只能通过上述的三种方式,只要把这三种方式都堵上,430的程序不就安全了吗?所以又引入了熔丝位,熔丝位只存在于JTAG、SBW接口逻辑内。